Изобретение относится к радионавигации и может быть использовано для определения местоположения подвижных, в том числе и высокоманевровых объектов.
Известна фазовая радионавигационная система с частотной селекцией сигналов "Декка" (см. Кинкулькин И.Е., Рубцов В.Д., Фабрик Н.А. Фазовый метод определения координат. М.: Сов. радио, 1979, с.71-90).
Система состоит из ведущей, трех ведомых береговых передающих станций и бортовых приемоиндикаторов. Длина базовых линий (расстояние между ведущей и ведомой станциями) 100-220 км. Дальность действия системы 400 км. Погрешность определения координат от 16-60 м днем до 1000 м ночью.
Принцип действия системы основан на излучении береговыми передающими станциями немодулированных когерентных колебаний на частотах, находящихся по отношению к частоте ведущей станции в простых целочисленных соотношениях  ;
;  ;
;  . В бортовых приемоиндикаторах эти частоты приводятся к одной частоте сравнения для каждой пары станций и определяют разности фаз принятых непрерывных сигналов.
. В бортовых приемоиндикаторах эти частоты приводятся к одной частоте сравнения для каждой пары станций и определяют разности фаз принятых непрерывных сигналов.
Недостатками данной радионавигационной системы является необходимость разрешения многозначности фазовых измерений, а также возрастание погрешностей фазовых измерений в ночное время.
Известна также импульсно-фазовая радионавигационная система "Лоран-С", выбранная нами в качестве прототипа.
Импульсно-фазовая радионавигационная система (ИФРНС) состоит из группы наземных передающих станций, одна из которых является ведущей, остальные (не менее двух) - ведомыми, и неограниченного числа приемных станций.
Длина базовых линий - от 600 до 800 миль. Дальность действия 900-1480 миль при ошибке измерения 0,1 мкс.
Каждая передающая станция состоит из передатчика импульсных радиосигналов на частоте f1 = 100000 кГц с аппаратурной синхронизации, обеспечивающей синхронную работу всех передающих станций.
В системе "Лоран-С" передающие станции излучают серии (пакеты) импульсов с временным разрешением сигналов наземных станций. Для этого на ведомых станциях генерирование серии импульсов выполняют с заданной для каждой станции кодовой задержкой относительно момента излучения серии импульсов ведущей станции. При этом в рабочей области образуется заданная временная диаграмма импульсных радиосигналов.
Приемная станция состоит из приемника импульсных радиосигналов, не менее трех каналов измерения фазы импульсных радиосигналов, опорного генератора и измерителя разностных координат объекта.
На приемной станции известной радионавигационной импульсно-фазовой системы для определения разностных координат:
- принимают приемником импульсные радиосигналы ведущей и ведомой станций;
- формируют опорную частоту f1*;
- осуществляют автоматический поиск принятых сигналов на фоне атмосферных помех, например, по квадратурной схеме, в которой в двух квадратурных каналах сравнивают смеси сигнала и помехи с опорным сигналом по фазе;
- измеряют в измерительных каналах фазы высокочастотных колебаний сигналов каждой передающей станции;
- устраняют многозначность измерения фазы путем допоиска характеризующей точки (ХТО) на переднем фронте импульсных радиосигналов;
- определяют разностные координаты как разность временных задержек, полученных в соответствующих каналах измерения фазы.
Для уменьшения шумовых погрешностей в каналах поиска устраняются многозначности и измерения фазы, необходимо длительное накопление полезного сигнала, что эквивалентно уменьшению полосы пропускания следящей системы.
Уменьшение полосы пропускания приводит при эволюции подвижного объекта к появлению динамических погрешностей и снижению точности радионавигационной системы.
Целью настоящего изобретения является повышение точности и надежности измерения координат подвижного объекта приемной станцией путем введения в каждую передающую станцию дополнительного маломощного передатчика непрерывного или квазинепрерывного радиосигнала, засинхронизированного с сигналом импульсного радиопередатчика, а в каждую приемную станцию - трех каналов измерения фазы непрерывного сигнала. Выходные сигналы этих каналов после соответствующего преобразования используются в каналах измерения фазы импульсного радиосигнала как опорные сигналы, что приводит к компенсации в этих каналах динамической погрешности и соответственно к увеличению точности радионавигационной системы.
Сущность изобретения состоит в том, что радионавигационная система содержит не менее трех передающих станций и неограниченного числа приемных станций. Каждая передающая станция содержит передатчик импульсных радиосигналов на частоте f1, а каждая приемная станция содержит приемник импульсных радиосигналов и не менее трех каналов измерения фазы импульсного радиосигнала, измеритель разности фаз и опорный генератор.
Вход каждого канала измерения фазы импульсного радиосигнала соединен с выходами приемника, а выход канала измерителя фазы - с соответствующим входом измерителя фаз.
Предложенная радионавигационная система отличается от известной тем, что с целью повышения точности и надежности измерений фазы импульсных радиосигналов в каждую передающую станцию введен передатчик непрерывного или квазинепрерывного радиосигнала на частоте fi ≠ fi (где i = 2, 3, 4 - номер частотного канала). Вход передатчика непрерывного радиосигнала для синхронизации соединен с передатчиком импульсных радиосигналов.
В каждую приемную станцию дополнительно введены не менее трех каналов измерения фазы непрерывного радиосигнала, причем каждый канал содержит приемник непрерывного радиосигнала на частоте fi, соединенный с измерителем фазы непрерывного радиосигнала. Выход каждого канала измерения фазы непрерывного радиосигнала соединен со вторым входом соответствующего измерителя фазы импульсного радиосигнала.
Выход опорного генератора соединен со вторыми входами измерителей фазы непрерывного радиосигнала.
Таким образом, путем введения дополнительного передатчика непрерывных радиосигналов на каждой наземной станции и каналов фазовых измерений этих сигналов на приемной станции удается откорректировать опорную частоту на величину, соответствующую скорости изменения фазы импульсных радиосигналов. Тем самым, поиск, определение характерной точки и непосредственные фазовые измерения осуществляют в режиме, эквивалентном квазистатическому. Это исключает динамические ошибки и тем самым повышает точность и надежность ИФРНС.
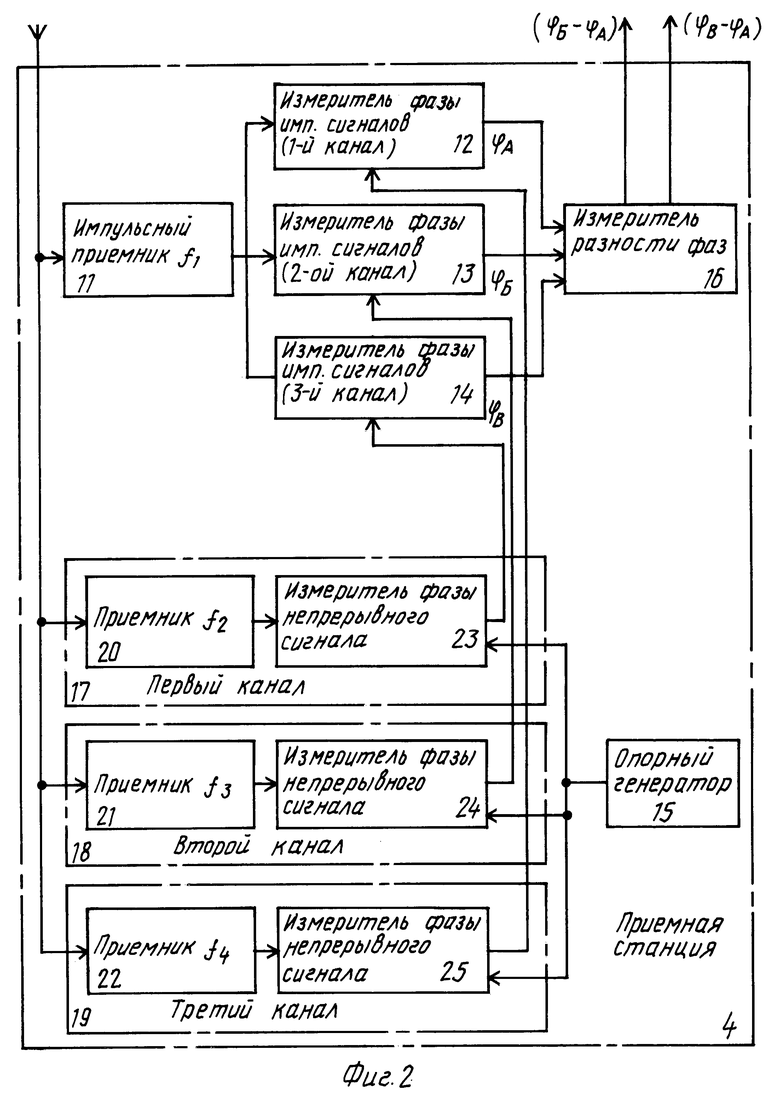
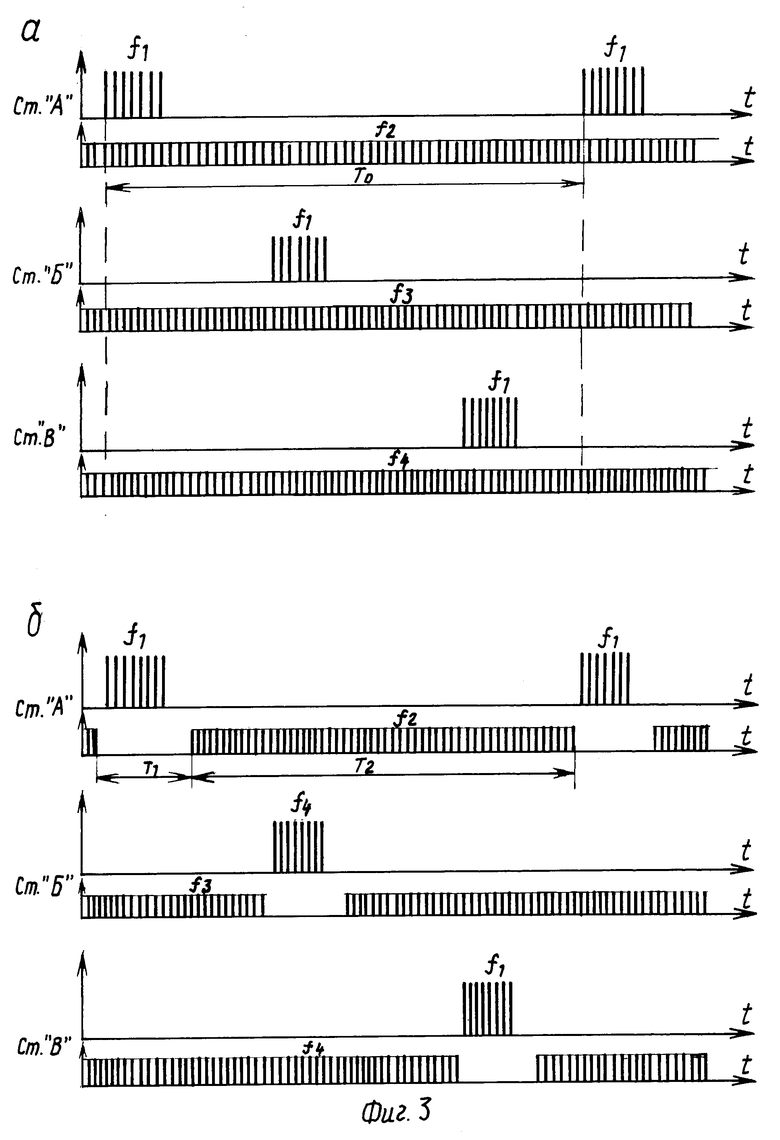
На фиг. 1 изображена структурная схема предложенной радионавигационной системы; на фиг. 2 - структурная схема приемной станции; на фиг. 3 - временные диаграммы сигналов, излучаемых тремя станциями предложенной радионавигационной системы (а - непрерывный режим дополнительного излучения, б - квазинепрерывный режим).
Обозначения на чертежах:
1 - передающая станция "А" (ведущая);
2 - передающая станция "Б" (первая ведомая);
3 - передающая станция "В" (вторая ведомая);
4 - приемная станция (приемоиндикатор);
5 - передатчик импульсных радиосигналов станции "А";
6 - передатчик импульсных радиосигналов станции "Б";
7 - передатчик импульсных радиосигналов станции "В";
8 - передатчик непрерывных радиосигналов станции "А";
9 - передатчик непрерывных радиосигналов станции "Б";
10 - передатчик непрерывных радиосигналов станции "В";
11 - приемник импульсных радиосигналов;
12 - измеритель фазы импульсных радиосигналов (первый канал);
13 - измеритель фазы импульсных радиосигналов (второй канал);
14 - измеритель фазы импульсных радиосигналов (третий канал);
15 - опорный генератор;
16 - измеритель разности фаз;
17 - первый канал измерения фазы непрерывного радиосигнала;
18 - второй канал измерения фазы непрерывного радиосигнала;
19 - третий канал измерения фазы непрерывного радиосигнала;
20 - приемник f2;
21 - приемник f3;
22 - приемник f4;
23 - измеритель фазы непрерывного сигнала f2;
24 - измеритель фазы непрерывного сигнала f3;
25 - измеритель фазы непрерывного сигнала f4.
Предложенная радионавигационная система (см. фиг. 1) может, например, состоять из трех синхронизированных между собой передающих станций: одной ведущей 1 и двух ведомых 2 и 3 и приемной станции (приемоиндикатора) 4. Каждая передающая станция содержит передатчик импульсных радиосигналов 5, 6, 7 и дополнительный маломощный передатчик непрерывных или квазинепрерывных радиосигналов 8, 9, 10, вход которого соединен с передатчиком импульсных радиосигналов.
Приемная станция (см. фиг. 2) содержит приемник импульсных радиосигналов 11, выход которого подключен к первым входам трех каналов измерения фазы импульсных радиосигналов 12, 13, 14, опорный генератор 15 и измеритель разности фаз 16, причем выход каждого канала измерения фазы импульсного радиосигнала подключен к соответствующему входу измерителя разности фаз.
В приемную станцию входят три канала измерения фазы непрерывного радиосигнала 17, 18, 19, причем каждый канал содержит приемник 20, 21, 22, соединенный с соответствующим измерителем фазы 23, 24, 25, второй вход которого соединен с опорным генератором.
Предлагаемая радионавигационная система работает следующим образом. На передающей станции "А" (ведущей) в радиопередатчике, используя задающий высокостабильный генератор, формируют пакеты из 8-ми импульсов с периодом То (фиг. 3) и излучают радиоимпульсы при частоте f1 = =1000 кГц. Длительность излучаемых радиоимпульсов равна 100-200 мкс, период следования импульсов в пакете 1000 мкс, период следования пакетов 40-100 мс.
Для обеспечения необходимого уровня навигационного сигнала относительно атмосферных помех импульсная мощность излучаемых сигналов должна быть не менее 30 кВт. При этом энергия излучаемых импульсов концентрируется в полосе порядка 25 кГц.
На передающих ведомых станциях "Б" и "В" формируют и излучают с заданными временными задержками серии таких же импульсных радиосигналов (фиг. 3). При этом поддерживается синхронизация излучаемых всеми передающими станциями радиосигналов, для чего используют, например, специальную аппаратуру управления и синхронизации и высокостабильный генератор.
Технические характеристики импульсного радиопередатчика передающих станций предлагаемой радионавигационной системы приведены в кн. Быкова В.И. и Никитенко Ю.И. Судовые радионавигационные устройства. М.: Транспорт, 1976, с.135-136.
Дополнительно на каждой передающей станции излучают высокочастотные узкополосные колебания на частоте fi, где i - номер частотного канала (i = 2, 3, 4), которая отличается от несущей частоты импульсных сигналов f1на заданную для каждой станции величину.
Так, для неискаженного приема импульсных и непрерывных сигналов в полосе частот Δ f1, отведенной ИФРНС, выбор частот fi может осуществляться, например, по следующему правилу:
fi= f1 ±  (2k-1), где Ти - интервал между импульсами в пакете навигационного сигнала;
(2k-1), где Ти - интервал между импульсами в пакете навигационного сигнала;
f1 - несущая частота импульсного радиосигнала;
k - целые числа, выбираемые по числу станций из следующей последовательности 1, 2, ..., n  n =
n =  ;
;
i - номер частотного канала.
Можно принять, например, К = 10, 15, 20. Тогда для f1 = 100 кГц и Ти = 1000 мкс, получим: f2 = 109,5 кГц, f3 = 114,5 кГц, f4 = 119,5 кГц.
Мощность излучения дополнительных узкополосных сигналов, обеспечивающая превышение сигнала над помехой в три раза (на выходе фильтра с полосой 50 Гц) на расстоянии 100--120 км, не будет превышать 50 Вт.
В качестве маломощного дополнительного передатчика могут быть использованы блоки наземной станции "Декка" (см. кн. Кинкулькин И.Е. и др. Фазовый метод определения координат, М.: Сов. радио, 1979, с.71-72 и 82).
Практически в предложенной радионавигационной системе могут быть реализованы два режима излучения допол- нительного узкополосного сигнала: непрерывной (фиг. 3, а) и квазинепрерывной (фиг. 3, б) режимы.
При квазинепрерывном режиме дополнительный радиосигнал излучают в интервале Т2 = То - Т1, где Т1 - время передачи пакета импульсных радиосигналов (Т2 > Т1).
Квазинепрерывный режим позволяет использовать на наземной станции одну передающую антенну, а также упрощает схему выделения на приемной станции дополнительных частот. В то же время режим излучения непрерывного сигнала не требует введения на передающей станции блока коммутации передатчиков.
На приемной станции приемник импульсных радиосигналов принимает последовательно сигналы ведущей и двух ведомых станций на частоте f1, а приемники дополнительных частот f2, f3 и f4 непрерывные или квазинепрерывные радиосигналы.
Принятые на высокоманевренном объекте радиосигналы отличаются по частоте от излученных передающими станциями на величину доплеровского смещения.
Частотный сдвиг определяется скоростью перемещения приемной станции относительно наземных передающих станций и равен
Δfij=  fi·cos(KУ-Aj); где Vпс - путевая скорость объекта, на которой размещены приемная станция;
fi·cos(KУ-Aj); где Vпс - путевая скорость объекта, на которой размещены приемная станция;
С - скорость распространения радиосигнала;
fi - несущая частота излучаемого радиосигнала;
КУ - курс объекта, на котором размещена приемная станция;
Aj - азимут на j-ю передающую станцию ИФРНС.
Максимальный частотный сдвиг при путевой скорости 3000 км/час достигает величины 0,3 Гц.
Импульсные радиосигналы ведущей и ведомых передающих станций, принятые приемником, поступают на первые входы каналов измерения фазы, где предварительно осуществляется поиск и допоиск соответствующих радиосигналов. Непрерывные радиосигналы с выходов соответствующих приемников поступают на первые входы измерительной фазы этих сигналов.
Одновременно с помощью опорного генератора формируют опорные частоты f2*, f3*, f4* для измерителей фазы непрерывных сигналов.
В измерителях фазы непрерывных радиосигналов происходит слежение опорных сигналов за изменением фазы принятых узкополосных радиосигналов. Частота выходного сигнала каналов измерения фазы непрерывных радиосигналов после фильтрации помех равна
f
Для построения предложенной приемной станции могут быть использованы схемы, приведенные в кн. Казаринова Ю.М. и др. Поиск, обнаружение и измерение параметров сигналов в радионавигационных системах, М.: Сов. радио, 1975, с.188, 259 и 269.
Оценим положительный эффект, возникающий при реализации предложенной радионавигационной системы и выражающийся в уменьшении инструментальной погрешности измерения фазы и соответственно разностных координат.
Инструментальная погрешность измерения фазы радиосигнала в известной радионавигационной системе (σи1) определяется шумовыми погрешностями ( σш) и динамическими погрешностями (σд).Общая погрешность равна
σи1= 
(1) Инструментальная погрешность измерения фазы импульсных радиосигналов в предлагаемой радионавигационной системе (с учетом, что σд = 0) равно:
σи2= 
(2) где σш1 - шумовая погрешность канала измерения фазы импульсного радиосигнала;
σш2 - шумовая погрешность измерителя фазы непрерывного сигнала.
Применительно к измерителю с временным дискриминатором шумовая погрешность измерения фазы равна:
σϕ = 
 , рад,
, рад,
(3) где gпр - отношение сигнал/шум на выходе приемника, т.е. на входе измерителя;
Δ Fсс - эквивалентная полоса следящей системы;
Ти- период следования импульсов ИФРНС. (см. Быков В.И. и Никитенко Ю.И. Судовые радионавигационные устройства. М.: Транспорт, 1876, с.101-103).
С учетом погрешностей по двум измерительным каналам получим погрешность определения разностных координат, равную
σш1 = 
 , мкс,
, мкс,
(4) Приняв для известной радионавигационной системы Δ Fсс = 0,1 Гц, gпр =  , f1 = 105 Гц, Ти = 40000 мкс, получим σш1 = 0,61 мкс.
, f1 = 105 Гц, Ти = 40000 мкс, получим σш1 = 0,61 мкс.
Динамическая погрешность для следящей системы 2-го порядка возникает, если объект двигается с ускорением.
Величина погрешности
σд= 2a T
a - ускорение движущегося объекта.
В качестве подвижного объекта, на котором установлена приемная станция, выбран самолет, совершающий координированный разворот с креном β. Ускорение при таким развороте
a = 9,8 tg β. (6) При β = 30 ускорение равно 5,76 м/с2 (0,019 мкс/с2) и динамическая погрешность 3,84 мкс.
Общая инструментальная погрешность в известной радионавигационной системе достигает величины 3,89 мкс.
Для предложенной радионавигационной системы σд = 0, но дополнительно вносятся шумовая погрешность канала измерения фазы непрерывного сигнала σш2, равная
σш2 = 
 где Δ fф - полоса пропускания полосового фильтра;
где Δ fф - полоса пропускания полосового фильтра;
Δ Fсс2 - эквивалентная полоса пропускания измерителя фазы непрерывного сигнала;
gф - отношение сигнал/шум на выходе фильтра.
Приняв Δ fпр = 25 кГц, Δ fф = 50 Гц, gпр =  , получим fф = 7,45 и σш2 = 0,02 мкс.
, получим fф = 7,45 и σш2 = 0,02 мкс.
Общая инструментальная погрешность в предлагаемой радионавигационной системе для оговоренных условий будет равна σи2 = 0,62 мкс, т.е. точность системы возрастает на порядок.
Дополнительный положительный эффект можно получить за счет увеличения постоянной времени следящих систем при сохранении нулевой динамической погрешности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СТАНЦИИ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2014630C1 |
| УСТРОЙСТВО ДЛЯ ПРИВЯЗКИ ШКАЛ ВРЕМЕНИ | 1992 |
|
RU2046393C1 |
| УСТРОЙСТВО КОНТРОЛЯ СИНХРОНИЗАЦИИ МОМЕНТОВ ИЗЛУЧЕНИЯ СИГНАЛОВ ОПОРНЫХ СТАНЦИЙ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2012898C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СТАНЦИИ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2014629C1 |
| ПРИЕМОКООРДИНАТОР | 1990 |
|
RU2065612C1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНОЙ ИНФОРМАЦИИ ПО РАДИОКАНАЛАМ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1994 |
|
RU2079855C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 1990 |
|
RU2012012C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2080646C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2115946C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ В УСЛОВИЯХ ПОМЕХ | 1991 |
|
RU2030757C1 |
Использование: в радионавигации. Сущность изобретения: радионавигационная система содержит передающие станции 1, 2, 3, приемную станцию 4, передатчики импульсных радиосигналов 5, 6, 7, передатчики непрерывных радиосигналов 8, 9, 10, приемник импульсных радиосигналов, измерители фазы импульсных радиосигналов, опорный генератор, измеритель разности фаз, каналы измерения фазы непрерывного сигнала, приемник непрерывных сигналов, измерители фазы непрерывного сигнала. 3 ил.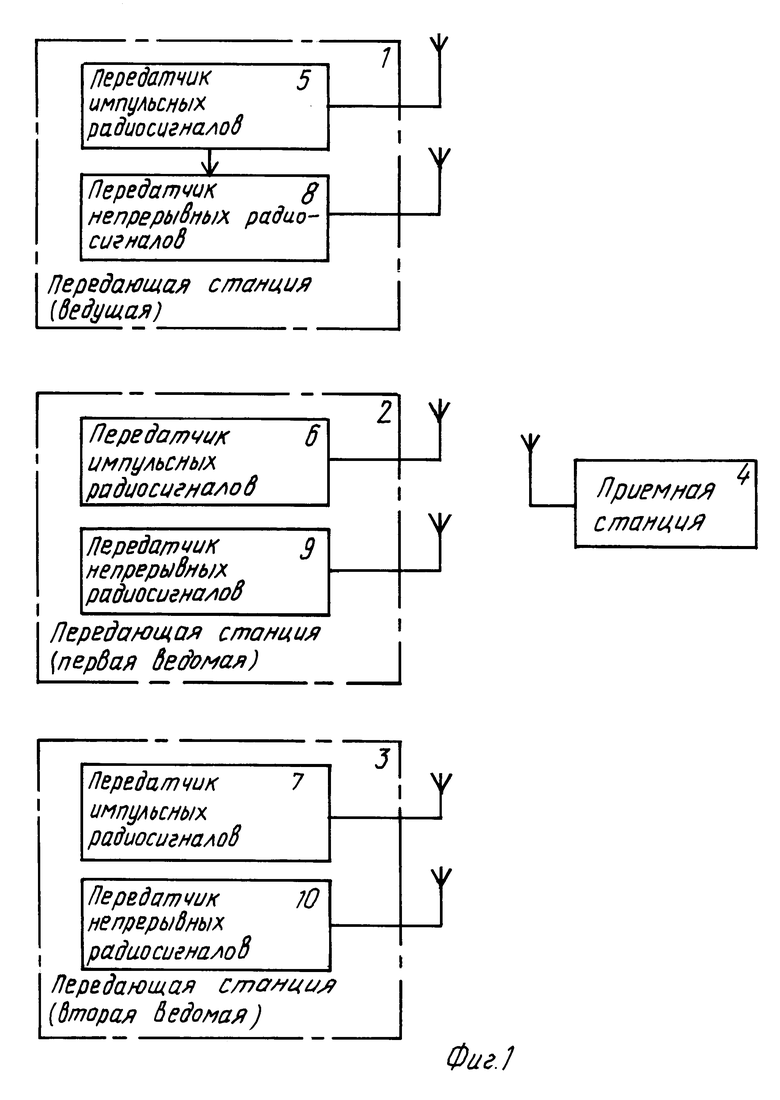
РАДИОНАВИГАЦИОННАЯ СИСТЕМА, содержащая не менее трех передающих станций и приемные станции, при этом каждая передающая станция содержит передатчик импульсного радиосигнала на частоте f1, приемная станция содержит приемник импульсных радиосигналов, не менее трех каналов измерения фазы импульсного радиосигнала, измеритель разности фаз и опорный генератор, причем каждый канал измерения фазы импульсного радиосигнала соединен с приемником и соответствующим входом измерителя разности фаз, отличающаяся тем, что, с целью повышения точности измерений, введены в каждую передающую станцию передатчик непрерывного или квазинепрерывного радиосигнала на частоте fi ≠ f1, где i = 2,3,4, . .., вход которого соединен с вторым выходом передатчика импульсных радиосигналов, в каждую приемную станцию - не менее трех каналов измерения фазы непрерывного радиосигнала, причем каждый канал содержит приемник непрерывного радиосигнала на частоте fi, соединенный с измерителем фазы непрерывного радиосигнала, выход которого соединен с вторым входом соответствующего измерителя фазы импульсного радиосигнала, выход опорного генератора соединен с вторыми входами измерителей фазы непрерывного радиосигнала.
| Быков В.И., Никитенко Ю.И | |||
| Судовые радионавигационные устройства, М.: Транспорт, 1967, с.147-180. |
