Изобретение относится к станкостроению/ преимущественно для инструментальных блочных систем/ обрабатывающих центров и различных станков с ЧПУ.
Известны устройства соединения модулей с креплением боковыми винтами/ где расточка базового модуля охватывает хвостовик присоединяемого модуля и поджимает к его торцу посредством ввинчиваемого в радиальное отверстие корпуса винта/ коническая головка которого взаимодействует с поверхностью конического углубления/ выполненная в устанавливаемой в хвостовике вставке/ эксцентричного относительно отверстия под винт. Для повышения жесткости конструкция в стенке отверстия державки соосно с винтом выполнено обращенное к нему коническое углубление/ а в хвостовике корпуса - поперечное отверстие под вставку/ на одном из торцов которой расположено коническое углубление/ а другой выполнен в виде конуса/ взаимодействующего с поверхностью конического углубления державки.
Недостатком данных устройств является невысокая жесткость фиксации соединяемых модулей при относительно высокой сложности конструкции.
Известно также устройство соединения модулей с радиальным креплением/ где соединение двух модулей базового и присоединяемого происходит при помощи конического винта/ взаимодействующего с шариками/ которые/ в свою очередь/ деформируют упругий хвостовик присоединяемого модуля и тем самым происходит базирование и крепление модулей.
Недостатком данного устройства является высокая сложность конструкции при относительно низкой жесткости соединения модулей.
Известно также соединение модулей с радиальным креплением/ где соединение двух модулей базового и присоединяемого происходит при помощи тяги с конической поверхностью и ввернутой по резьбе в присоединяемый модуль/ двух клиновидных сухарей/ взаимодействующих с конической поверхностью тяги/ и винта с разными направлениями (правая-левая) резб/ приводящего в движение сухари.
Недостатком данного устройства является относительная сложность конструкции/ низкое быстродействие и удобство сборки-разборки модулей из-за большого количества деталей и отсутствия выталкивающего механизма при разборке модулей.
Цель изобретения - упрощение конструкции/ повышение быстродействия и удобства сборки модулей.
Поставленная цель достигается тем/ что устройство соединения модулей/ содержащее винтовую пару/ состоящую из хвостовика присоединяемого модуля с резьбовым отверстием и наружным диаметром в одном из его сечений не менее диаметра посадочного отверстия базового модуля и резьбовой тяги/ одним концом взаимодействующей с базовым модулем/ а другим установленной в отверстие присоединяемого модуля/ и винта/ имеющего возможность вращения вокруг оси/ перпендикулярной к оси упомянутых модулей. Винт выполнен с двумя оппозитно расположенными конусами и имеет возможность возвратно-поступательного перемещения/ а в тяге имеются две оппозитно расположенные клиновидные поверхности/ причем соответствующий конус винта взаимодействует с соответствующей клиновидной поверхностью тяги.
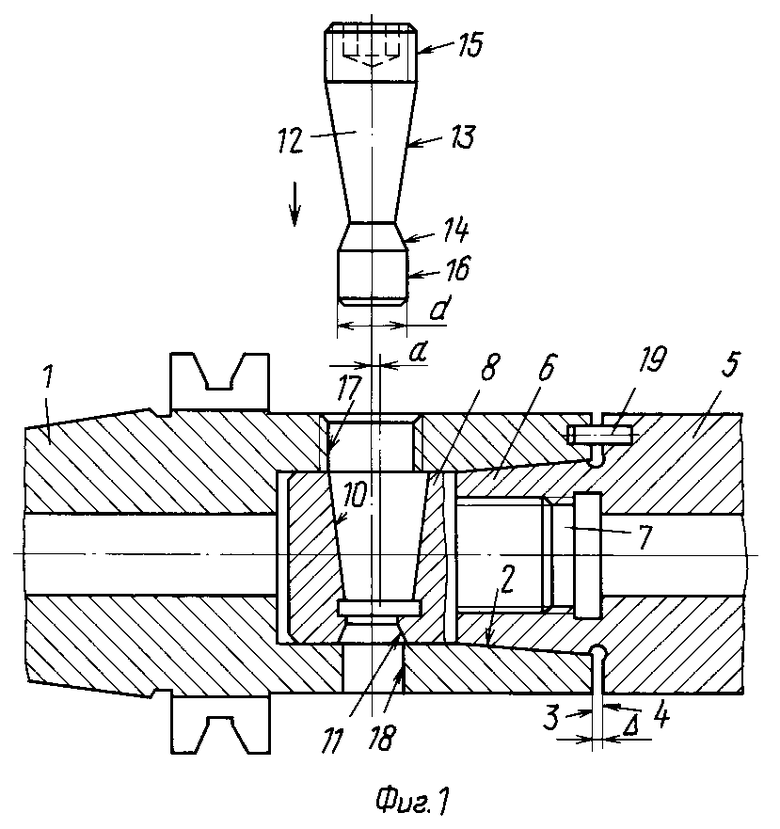
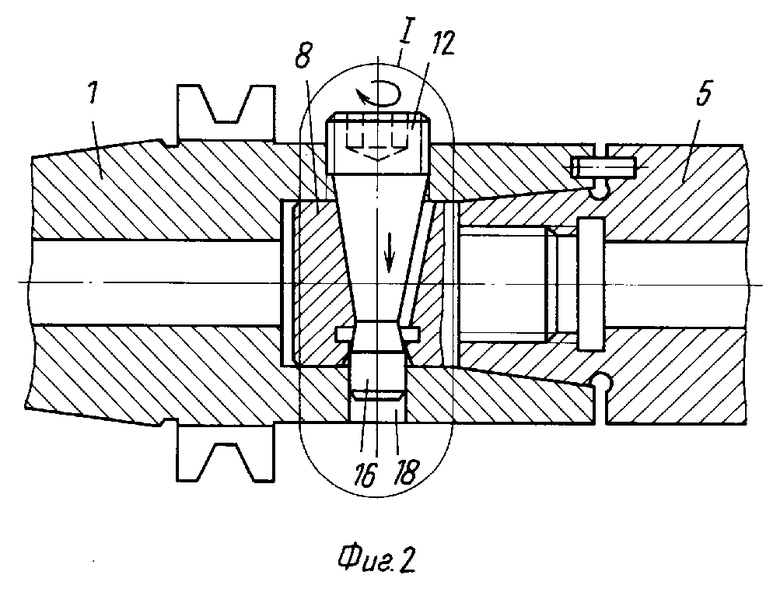
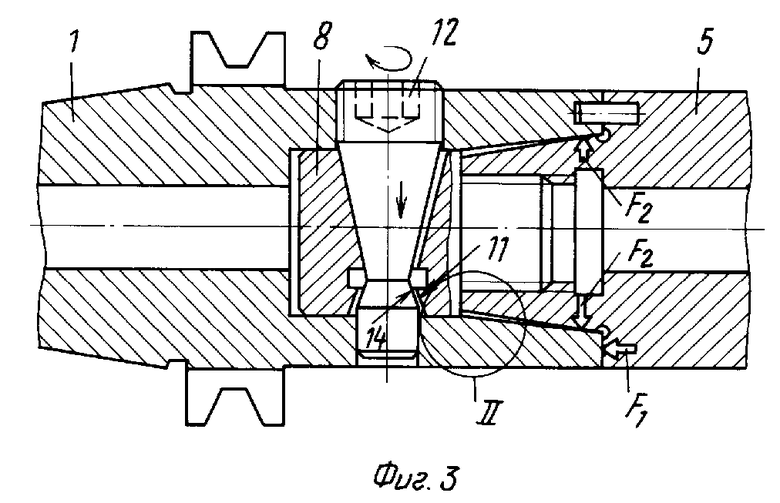
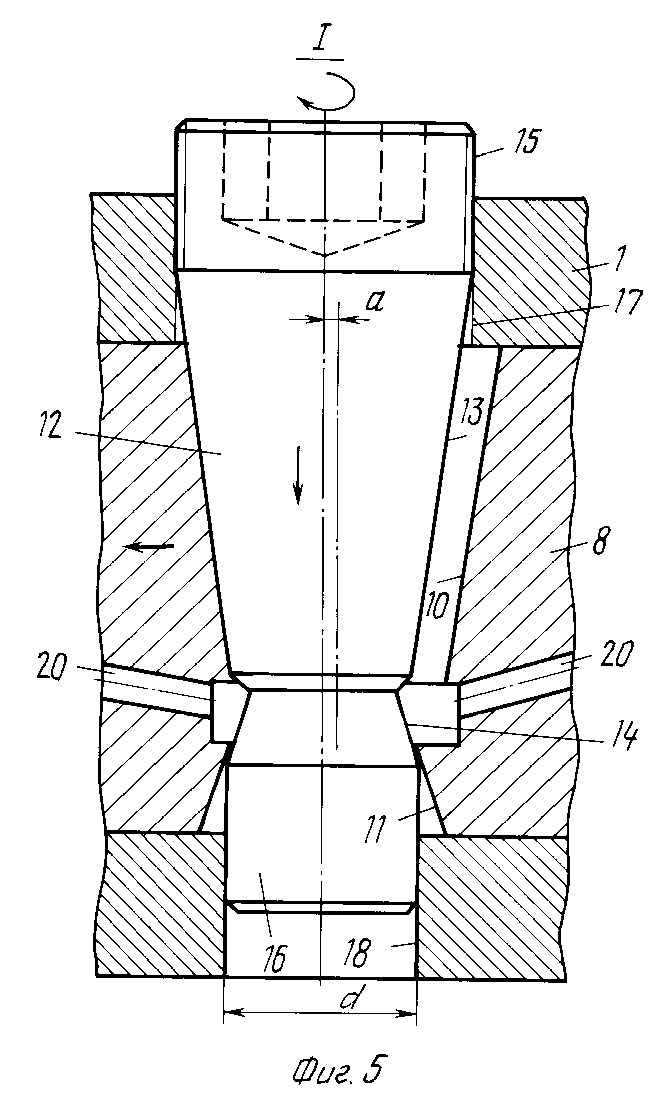
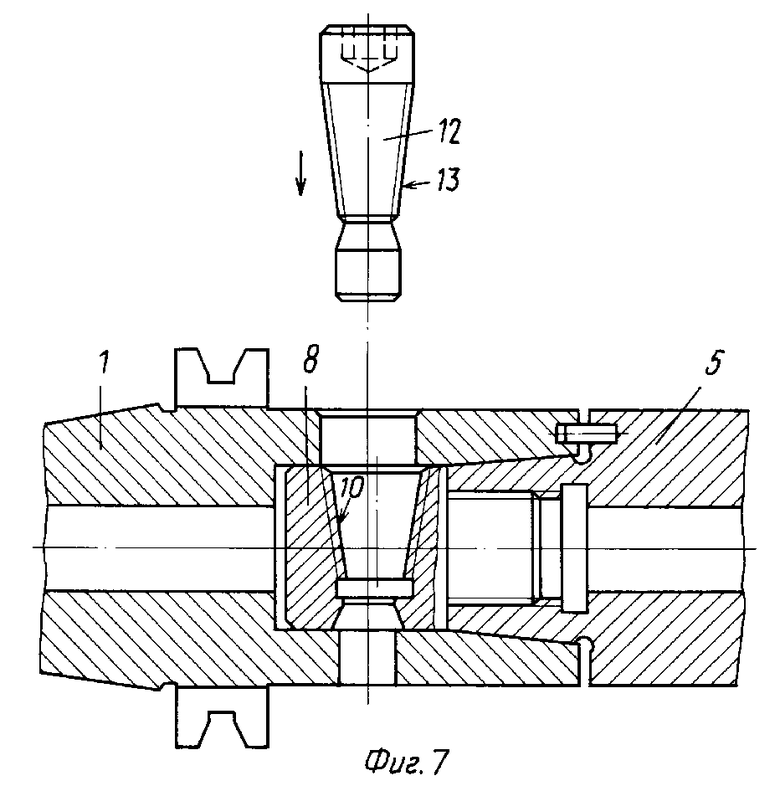
На фиг. 1 показано предлагаемое устройство/ общий вид; на фиг. 2-4 - общий вид устройства с различными положениями винта; на фиг. 5 - узел I на фиг. 2; на фиг. 6 - узел II на фиг. 3; на фиг. 7 - общий вид устройства для создания больших осевых усилий.
В корпусе одного/ в данном случае базового модуля 1/ выполнена полость с посадочным отверстием 2/ открытым на свой базирующий торец 3/ на который опирается своим базирующим торцом 4 другой (присоединяемый) модуль 5/ имеющий упругий хвостовик 6 с резьбовым отверстием 7 и входящий в отверстие 2. Наружный диаметр хвостовика 6 имеет по меньшей мере в одном из сечений диаметр не менее диаметра отверстия 2. В резьбовое отверстие 7 ввернута тяга 8 по резьбе 9.
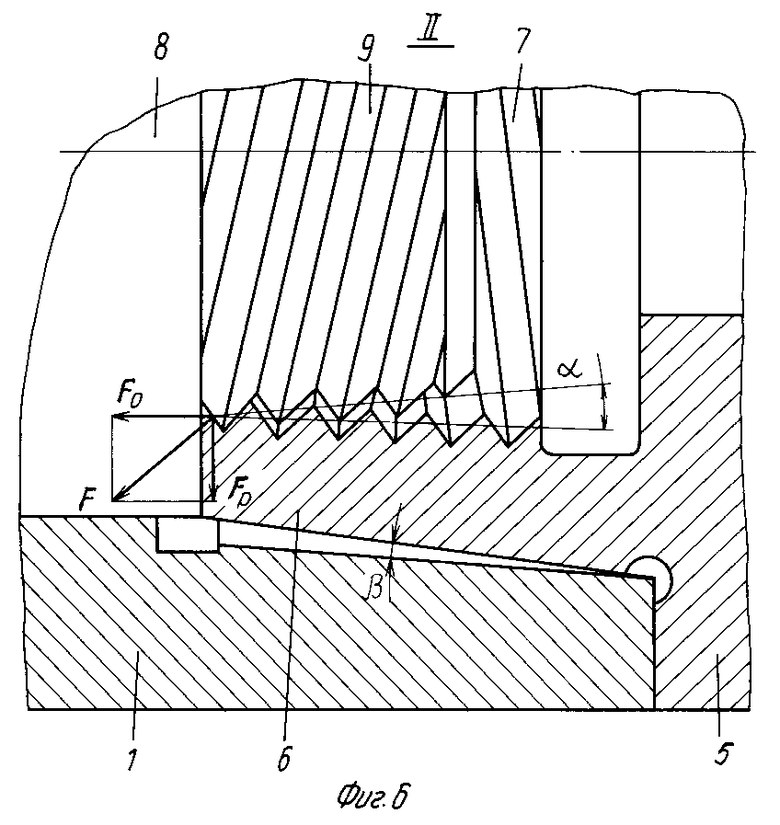
Резьба 9 на тяге 8 выполнена конической с небольшим углом α/ а в отверстии 7 присоединяемого модуля 5 - цилиндрической (метрической). В тяге 8 имеется также сквозное отверстие с двумя оппозитно расположенными (прямыми и обратными) клиновидными или конусными поверхностями 10 и 11/ причем оси этих поверхностей смещены на расстояние а (а ≥Δ + δ)/ где Δ - зазор между торцами 3 и 4; δ - величина запаса. Для соединения модулей 1 и 5 служит винт 12/ имеющий также два оппозитно расположенных конуса 13 и 14/ резьбовую поверхность 15 и цилиндрическую 16 с диаметром d. При больших осевых нагрузках на конусе 13 винта 12 и конусной поверхности 10 тяги 8 может быть выполнена резьба (фиг. 7)/ образуя тем самым несоосную коническую винтовую пару. В базовом модуле 1 выполнены соосно два отверстия 17 и 18/ с которыми сопрягаются элементы винта. Для передачи крутящего момента/ а также удобства процесса сборки модулей 1 и 5 служит шпонка 19. Для подвода охлаждающей жидкости используются каналы 20.
Функционирует устройство соединения модулей следующим образом.
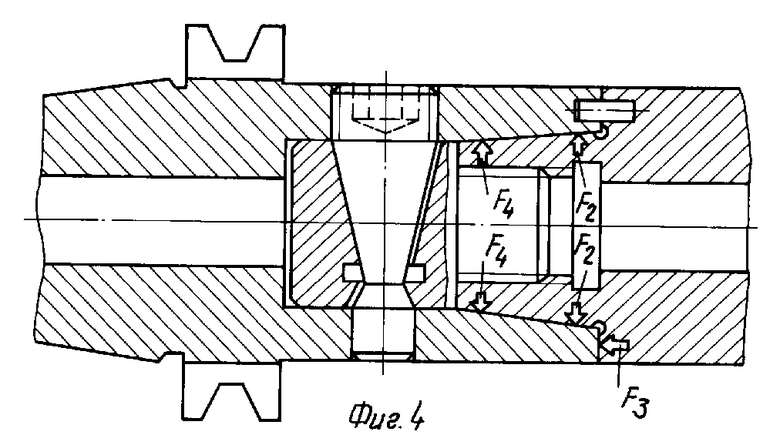
В исходном положении модулей 1 и 5 (фиг. 1) между их торцами 3 и 4 имеется зазор Δ/ а шпонка 19/ закрепленная на модуле 5/ входит в паз модуля 1. Отверстия 11/ 17 и 18 при этом находятся на одной оси/ а ось отверстия 10 смещена на расстояние а. Затем винт 12 вводится соосно с отверстиями 11/ 17 и 18 (фиг. 1). При вращении винта 12 его конус 13 взаимодействует с конусом 10 тяги 8. В это время винт 12 своей цилиндрической поверхностью 16 входит в отверстие 18 базового модуля 1 (фиг. 2 и 5)и базируется в нем/ тяга 8 вместе с присоединяемым модулем 5 перемещается внутрь модуля 1 и между торцами 3 и 4 устраняется зазор Δ/ а клиновидная поверхность 11 тяги 8 заходит за конус 14 винта 12 (фиг. 3).После выборки зазора Δ между торцами 3 и 4 возникает натяг F1/ а между сопрягаемыми поверхностями модулей 1 и 5 - натяг F2 (первый пояс контакта). В резьбовом сопряжении 7 и 9 возникает больше осевое усилие Fo/ которое воздействует на элементы отверстия 7/ разлагается на нормальное F и радиальное Fp. Осевое усилие Fo увеличивает натяг F1 между торцами 3 и 4 до F3 (фиг. 4).
Радиальное усилие Fp деформирует упругий хвостовик 6 модуля 5/ в результате чего его размеры повышаются и устраняется зазор β (фиг. 6) между сопрягаемыми поверхностями базового 1 и присоединяемого 5 модулями. Появляется второй пояс контакта с усилием F4 (фиг. 4).
При необходимости разборки модулей 1 и 5 винт 12 выворачивается и своим конусом 14 давит на клиновидную или конусную поверхность 11 тяги 8. В связи с этим возникает большое обратное осевое усилие/ которое разъединяет два модуля 1 и 5.
Экономическая эффективность предложенного технического решения заключается в простоте конструкции/ быстродействии и удобстве сборки-разборки модулей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СОЕДИНЕНИЯ МОДУЛЕЙ | 1992 |
|
RU2014980C1 |
| УСТРОЙСТВО СОЕДИНЕНИЯ МОДУЛЕЙ | 2004 |
|
RU2258581C1 |
| УСТРОЙСТВО СОЕДИНЕНИЯ МОДУЛЕЙ | 1992 |
|
RU2047462C1 |
| УСТРОЙСТВО СОЕДИНЕНИЯ МОДУЛЕЙ | 1991 |
|
RU2016736C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ МОДУЛЕЙ | 2004 |
|
RU2268107C1 |
| УСТРОЙСТВО СОЕДИНЕНИЯ МОДУЛЕЙ | 1992 |
|
RU2047460C1 |
| МЕХАНИЗМ НАСТРОЙКИ ИНСТРУМЕНТА | 2003 |
|
RU2245775C2 |
| УСТРОЙСТВО СОЕДИНЕНИЯ МОДУЛЕЙ | 2008 |
|
RU2396148C1 |
| РАСТОЧНАЯ ОПРАВКА | 2003 |
|
RU2247633C1 |
| ПАТРОН РАСТОЧНОЙ | 2003 |
|
RU2238177C1 |
Использование: станкостроение, устройства автоматической смены инструмента в многооперационных станках с числовым программным управлением. Сущность изобретения: устройство соединения модулей содержит винтовую пару, которая состоит из присоединяемого модуля с резьбовым отверстием в хвостовике и с наружным диаметром в одном из его сечений не менее диаметра посадочного отверстия базового модуля, резъбовой тяги им винта. Винт установлен с возможностью вращения и радиального перемещения по отношению к оси модулей. Винт выполнен с двумя встречно направленными сопрягаемыми конусами на его поверхности, взаимодействующими с соответствующими коническими поверхностями в тяге, которая сопряжена по резьбовой поверхности с присоединяемым модулем. 4 з.п.ф-лы, 7 ил.
