Изобретение относится к гидроакустике.
Известен способ распознавания подводного объекта (ПО), основанный на когерентном накоплении эхосигналов и принятии решения по энергетическому контрасту. Недостаток способа заключается в том, что он оптимизирован для неподвижного ПО. В районе с течением ПО колеблется [1].
Известен способ распознавания ПО по тенеграфическому изображению, заключающийся в излучении акустических сигналов, приеме и измерении эхосигналов от дна по элементам дальности и принятии решения по соответствию формы акустической тени форме ПО.
На течении ПО колеблется, что приводит к снижению вероятности правильного распознавания за счет размывания акустической тени по пространству и изменению ее формы во времени - мерцанию (за счет изменения положения в пространстве). Кроме того, ПО в звукопрозрачном исполнении корпуса данным способом не распознается.
Целью изобретения является повышение достоверности распознавания объекта.
Достигается это тем, что предлагаемый способ основан на анализе формы акустической тени от дорожки Кармана за корпусом ПО по элементам дальности вниз по течению. За информационный признак принята совокупность: соответствие формы дорожки Кармана акустической тени в виде протяженной мерцающей во времени изменяемой интенсивности эхосигналов от дна по элементам вниз по течению. Предлагаемый способ имеет следующие отличительные признаки:
- вместо акустической тени, соответствующей по форме корпусу ПО, принята форма протяженной тени от дорожки Кармана;
- наличие мерцающей интенсивности эхосигналов от дна по элементам дальности за счет того, что с корпуса ПО периодически срываются вихри дорожки Кармана и плывут вниз по течению, затеняя участки дна;
- мерцание тени от дорожки Кармана отличается от изменения теней окружающего пространства, что облегчает ее выделение по изменению;
- даже у ПО с звукопрозрачным корпусом дорожка Кармана образуется и тень от нее может быть обнаружена;
- максимальное отличие изменения интенсивности акустической тени от дорожки Кармана наблюдается в районе корпуса (где образуются вихри), что позволяет судить о местонахождении корпуса малозаметного и даже звукопрозрачного ПО.
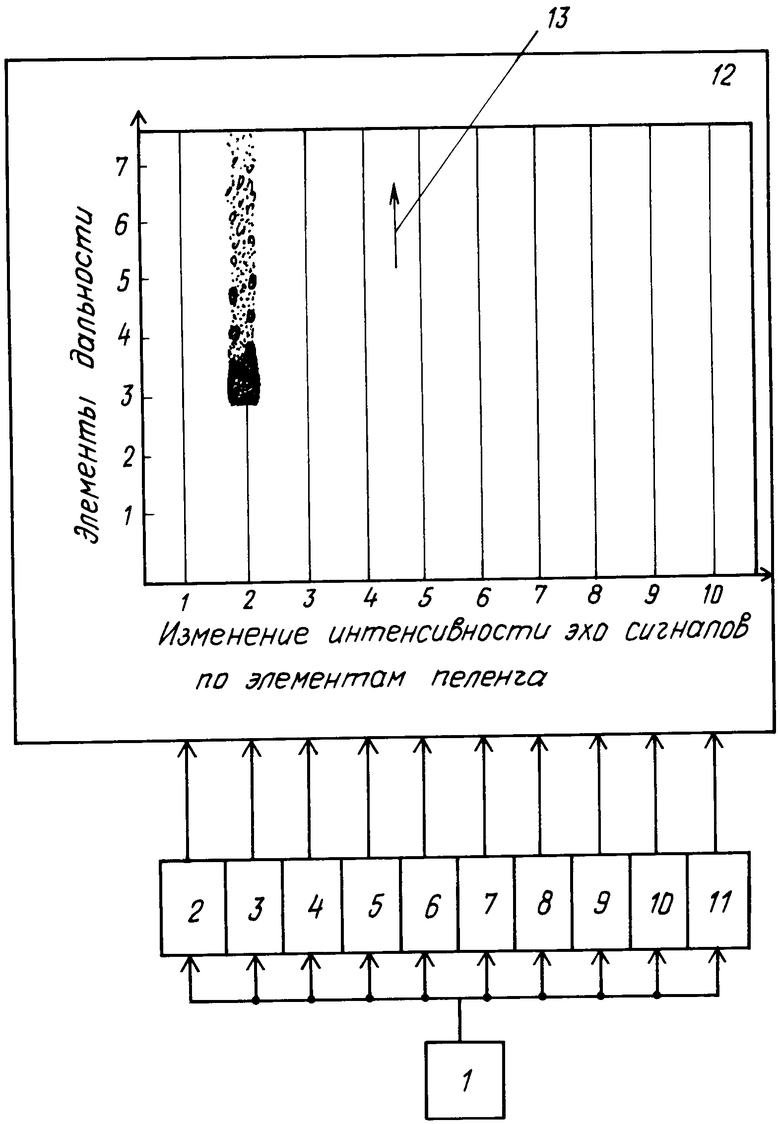
На чертеже приведена структурная схема устройства, реализующего способ.
Она состоит из гидролокатора 1; измерителей 2-11 - измерителей изменения интенсивности эхосигналов для соответствующих элементов исследуемого объема; 12 - многоперьевого регистратора в координатах: элементы дальности - изменение интенсивности по элементам пеленга; векторов 13 течения.
Работа блоков 1-11 и развертка блока 12 синхронизированы.
Способ заключается в излучении гидролокатором 1 акустических сигналов, приеме эхосигналов от дна и измерении блоками 2-11 изменения интенсивности эхосигналов для соответствующих элементов дальности и пеленга исследуемого объема во времени и вниз по течению.
По многоперьевому регистратору 12 в координатах: элементы дальности - изменение интенсивности по элементам пеленга видно, что во 2-ом направлении (пеленг N 2), в 3-ем элементе дальности отмечается максимальное изменение интенсивности, начиная с которого вниз по течению заметна убывающая величина мерцающей интенсивности эхосигналов, по форме соответствующая форме тени от дорожки Кармана. Наличие совокупности данных признаков дает высокую вероятность распознавания ПО (например, притопленного буя на якоре) в районе течением. В роли многоперьевого регистратора может быть использован регистратор эхолота.
Распознавание малозаметного ПО является сложной проблемой. Способ позволяет повысить достоверность распознавания малозаметных ПО на течении (даже при звукопрозрачном их исполнении).
Способ распознавания объекта правильной формы на течении по тенеграфическому изображению. Предлагаемый способ относится к гидроакустике. Цель предлагаемого способа - повышение достоверности обнаружения объектов. Достигается это дополнением известного способа операциями: определением изменения мерцающей интенсивности эхосигналов, по которому выделяют форму акустической тени, проверкой соответствия формы акустической тени форме дорожки Кармана и принятием решения о распознавании объекта в элементе дальности, начиная с которого вниз по течению отмечается убывающая величина изменения данной интенсивности. 1 ил.
СПОСОБ РАСПОЗНАВАНИЯ ОБЪЕКТА ПРАВИЛЬНОЙ ФОРМЫ НА ТЕЧЕНИИ ПО ТЕНЕГРАФИЧЕСКОМУ ИЗОБРАЖЕНИЮ, основанный на излучении акустических сигналов, приеме эхо-сигналов от дна, измерении эхо-сигналов от дна по элементам дальности в исследуемом районе, отличающийся тем, что в исследуемом районе измеряют интенсивность эхо-сигналов от дна вниз по течению, фиксируют изменение мерцающей интенсивности, по которому выделяют форму акустической тени, проверяют соотетствие формы акустической тени форме дорожки Кармана и принимают решение о распознавании объекта ("правильной формы") в элементе дальности, начиная с которого вниз по течению отмечается убывающая величина изменения данной интенсивности.
