Изобретение относится к акустическим измерениям и может быть использовано для определения скорости звука в воде при исследованиях мирового океана.
Известен способ определения скорости звука, основанный на излучении в исследуемую среду сигнала, приеме и определении скорости с использованием информации о фазе и амплитуде принятых сигналов. Для способа характерны ошибки в определении скорости.
Известен способ определения скорости звука в жидких средах, включающий излучение звука при помощи двух антенн, прием эхосигналов в процессе взаимного перемещения точек излучения-приема и отражения, измерение доплеровского сдвига частоты отраженных сигналов, регистрацию зависимости от времени коэффициентов авто- и взаимной корреляции эхосигналов, определение момента времени Т, при котором значения этих коэффициентов равны между собой и вычисление скорости звука по формуле
С= S˙f˙cos θ / (Δ f˙T), (1) где S - расстояние между излучающе-приемными антеннами;
f - частота излучаемого звука;
θ - угол между направлением излучения звука и плоскостью излучающе-приемных антенн;
Δf - доплеровский сдвиг частоты эхосигналов относительно частоты излучаемого звука;
Т - корреляционная временная задержка, при которой значение коэффициентов от автокорреляционной функции огибающей эхосигнал одной из антенн равно значению коэффициента взаимной корреляции огибающих эхосигналов двух антенн.
Выражение (1) получено путем сравнения корреляционного и доплеровского способов определения скорости движения объекта.
Недостаток прототипа - низкая точность измерения в районах плавания, характеризующихся широким разнообразием видов отражений от границ разделов сред, например от дна.
Цель изобретения - повышение точности.
Поставленная цель достигается тем, что в известном способе добавлена операция по задержке во времени на дополнительно вносимую регулируемую задержку τ2 огибающей эхосигнала от границы раздела сред первой по движению принимающей антенны для выполнения условия, при котором величина коэффициента взаимной корреляционной функции (ВКФ) находится в пределах 0,3-0,7 от своего максимального значения. Добавлена операция суммирования значения дополнительно вносимой регулируемой задержки τ2 огибающей эхосигнала от границы раздела сред первой по движению принимающей антенны со значением задержки τ1 автокорреляционной функции (АКФ), зафиксированной при равенстве коэффициента взаимной корреляции коэффициенту автокорреляции, измеренной при нулевой задержке. После выполнения добавленных операций определение скорости звука производится по измененному выражению:
С= S˙f˙cos θ / [Δf˙(τ1+τ2)]. (2)
Границей раздела жидкой среды считается поверхность соприкосновения двух соседних сред (слоев) в океане, отличающихся скоростью распространения звука в них, а значит, и своим доплеровским сдвигом и, кроме того, отражательной способностью.
Таким образом, добавлены две операции и изменена формула (операция вычисления), что позволяет сделать вывод о соответствии критерию "новизна".
Новая совокупность признаков проявляет новое свойство, не присущее известным в отдельности признакам, а именно - свойство выбора участка рабочих характеристик корреляционных функций с большими числовыми значениями и большей крутизной этих рабочих характеристик. Выбор такого участка позволяет повысить точность измерения корреляционной временной задержки, при которой коэффициенты автокорреляционной (АКФ) и взаимной корреляционной функции (ВКФ) равным между собой. Повышая точность измерения одного из сомножителей формулы (2) добиваемся цели изобретения - повышение точности определения скорости. Совокупность новых признаков с признаками прототипа обеспечивает достижение сверхсуммарного эффекта - получение устойчивой точности определения скорости в различных условиях и районах плавания, характеризующихся разнообразием видов рабочих характеристик корреляционных (АКФ и ВКФ) функций эхосигналов от раздела сред, например, различной крутизной, степенью сглаживания, максимальным интервалом корреляции. Уменьшение крутизны рабочей характеристики корреляционных функций ухудшает устойчивость работы прототипа. Из теории погрешностей известно, что среднеквадратическая оценка абсолютной случайной погрешности измерения функции одной переменной Y=f(x) характеризуется формулой σу=  y/∂x
y/∂x , в нашем случае Y=τ, х= ρ (τ ) и στ= σρ/
, в нашем случае Y=τ, х= ρ (τ ) и στ= σρ/ /
/ (3), где ∂ ρ / ∂ τ - крутизна рабочей характеристики. Таким образом, для уменьшения погрешности требуется выбор участка рабочей характеристики АКФ с большим значением ее крутизны. При изменении уровня коэффициента АКФ от 0,3 до 0,05 для сохранения той же точности определения корреляционной временной задержки необходимо увеличить объем выборки в 5-30 раз. Степень этого увеличения зависит от вида рабочей характеристики АКФ. Применительно к заявленному способу предлагается использовать участок рабочей характеристики с большим значением АКФ и большей крутизной рабочей характеристики коэффициента АКФ и как показал анализ экспериментального материала участок рабочей характеристики должен иметь значения коэффициентов АКФ и ВКФ в диапазоне 0,3-0,7 от максимума. Использование участка со значениями >0,7 приведет к увеличению погрешностей, т.к. крутизна на этом участке меньше. Поэтому в заявляемом техническом решении вводится признак регулируемой временной задержки, позволяющей оптимизировать работу способа в условиях расширенного диапазона характеристик границы раздела сред [3]. Таким образом, наличие нового свойства известных признаков, проявляемого в заявленном решении, а также появление сверхсуммарного эффекта от совокупности новых признаков, новых связей с признаками прототипа обеспечивают изобретению соответствие критерию существенные отличия и достижения положительного эффекта, соответствующего цели изобретения.
(3), где ∂ ρ / ∂ τ - крутизна рабочей характеристики. Таким образом, для уменьшения погрешности требуется выбор участка рабочей характеристики АКФ с большим значением ее крутизны. При изменении уровня коэффициента АКФ от 0,3 до 0,05 для сохранения той же точности определения корреляционной временной задержки необходимо увеличить объем выборки в 5-30 раз. Степень этого увеличения зависит от вида рабочей характеристики АКФ. Применительно к заявленному способу предлагается использовать участок рабочей характеристики с большим значением АКФ и большей крутизной рабочей характеристики коэффициента АКФ и как показал анализ экспериментального материала участок рабочей характеристики должен иметь значения коэффициентов АКФ и ВКФ в диапазоне 0,3-0,7 от максимума. Использование участка со значениями >0,7 приведет к увеличению погрешностей, т.к. крутизна на этом участке меньше. Поэтому в заявляемом техническом решении вводится признак регулируемой временной задержки, позволяющей оптимизировать работу способа в условиях расширенного диапазона характеристик границы раздела сред [3]. Таким образом, наличие нового свойства известных признаков, проявляемого в заявленном решении, а также появление сверхсуммарного эффекта от совокупности новых признаков, новых связей с признаками прототипа обеспечивают изобретению соответствие критерию существенные отличия и достижения положительного эффекта, соответствующего цели изобретения.
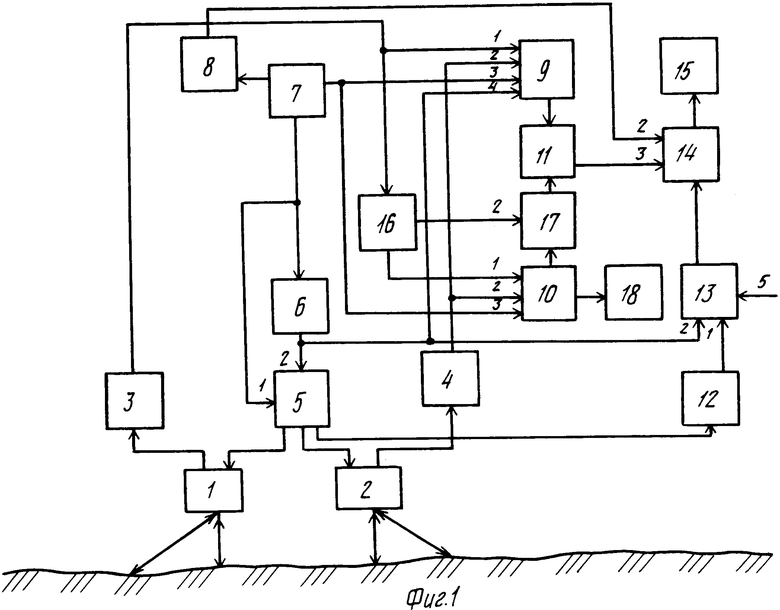
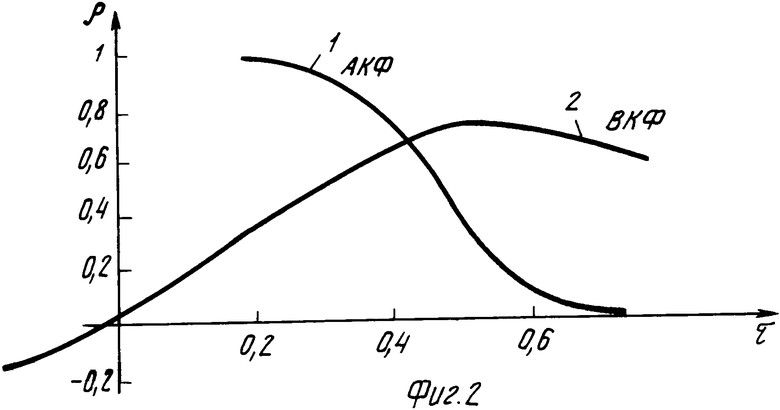
На фиг. 1 представлена структурная схема устройства для осуществления предлагаемого способа; на фиг. 2 - характерные функции АКФ и ВКФ; на фиг. 3 - графики напряжений для пояснения работы способа.
Устройство содержит первую 1 и вторую 2 излучающе-приемные антенны, первый 3 и второй 4 приемники, блок 5 задержки, передатчик 6, синхронизатор 7, схему 8 сброса, блок 9 измерения доплеровского сдвига частоты, блок 10 автовзаимнокорреляционной обработки, первый блок 11 умножения и последовательно соединенные регистр 12 памяти второй блок 13 умножения, делитель 14, блок 15 индикации, а также блок регулируемой временной задержки 16, блок сумматора 17 и второй индикатор 18. Выходы блока 5 задержки подключены к входам первой 1 и второй 2 излучающе-приемных антенн и регистра 12 памяти, входы первого 3 и второго 4 приемников соединены соответственно с выходами первой 1 и второй 2 антенны. Выход первого 3 приемника подключен к первому входу блока 9 измерения доплеровского сдвига частоты и одновременно через блок 16 регулируемой задержки - к первому входу блока 10. Выход второго 4 приемника подключен ко вторым входам блоков 9 и 10, выход блока 9 - к первому блоку умножения 11, второй вход которого соединен через блок 17 сумматора с выходом блока 10. Второй выход блока 10 соединен со вторым индикатором 18. Выходы синхронизатора 7 соединены с входами передатчика 6, схемы 8 сброса, с третьими: входом блока 9 измерения доплеровского сдвига частоты и блока 10 автовзаимокорреляционной обработки и с первым входом блока 5 задержки, выход передатчика 6 подключен к вторым входам блока 5 задержки и второго блока 13 умножения и к четвертому входу блока 9 измерения доплеровского сдвига частоты. Второй и третий входы делителя 14 соединены соответственно с выходами схемы 8 сброса и первого блока 11 умножения. Второй выход блока 16 регулируемой временной задержки соединен со вторым входом блока 17 сумматора.
При подаче питания по команде синхронизатора 7 в передатчик 6, формируется излучаемый импульс, который через блок 5 задержки, при помощи которого формируется угол θ между направлением излучения и плоскостью антенн, подается на антенны 1 и 2 (представляющие собой линейные решетки, состоящие из отдельных преобразователей, питание к которым подается от блока 5 с небольшим сдвигом по фазе). Антенны 1 и 2 излучают звук в сторону отражающей поверхности. Отраженный от грунта сигнал принимают на антенны 1 и 2, с выходов которых сигнал поступает на входы приемников 3 и 4, где эхосигналы приводятся к виду, приемлемому для обработки в блоке 9 (происходит разделение сигналов, усиление, преобразование по частоте и т.д.). В блоке 9 путем сравнения излучаемой частоты f и принимаемой частоты измеряют доплеровский сдвиг частоты Δf. Во время этого цикла работы синхронизатор 7 отключает блок 10. При следующем цикле измерений по команде синхронизатор 7 отключается от обработки эхосигналов блок 9. При этом передатчик 6 формирует излучаемый импульс, поступающий на антенны 1 и 2 без сдвига по фазе (за счет отключения блока 5 задержки по команде синхронизатора 7). В этом случае угол излучения θ =90о. Эхосигналы с выхода антенны 1 через последовательно соединенные приемник 3 и блок 16 регулируемой задержки τ2 поступают на 1-й вход блока 10. Эхосигналы с выхода антенны 2 через приемник 4 поступают на 2-й вход блока 10. В блоке 10 регистрируют значения коэффициентов АКФ и ВКФ, сравнивают их и определяют время τ1 - при котором значение коэффициента ВКФ равно значению коэффициента АКФ при нулевой задержке. Значение τ1 из блока 10 и значение введенной регулируемой задержки τ2 с блока 16 поступают на блок 17 сумматора. Сигналы с выходов блоков 9 и 17 поступают на первый блок 11 умножения, с выхода которого сигнал вида Δf (τ1+ τ2) поступает на вход делителя блока деления 14. Одновременно на вход делимого блока деления 14 поступает сигнал вида S˙f ˙cos θ, который формируется во втором блоке 13 умножения, на входы которого подаются масштабный коэффициент, пропорциональный S, частота излучаемого сигнала f с выхода передатчика 6 и cosθ с выхода регистра 12 памяти, вход которого подключен к выходу блока 5 задержки. С выхода блока деления 14 информация о скорости звука в среде поступает на блок 15 индикации. При следующем цикле по команде синхронизатора 7 через схему 8 сброса осуществляется сброс информации на выходе блока деления 14, блока 15 индикации и установка блоков 9 и 19 в исходное состояние для последующих измерений. Циклы повторяются. На втором индикаторе 18 (индикаторе блока 10) высвечивается значение коэффициента ВКФ при нулевой задержке. Оператор регулирует τ2 в блоке 16 регулируемой задержки до тех пор, пока значение коэффициента ВКФ на втором индикаторе 18 (индикаторе блока 10) не окажется в диапазоне 0,3-0,7. Выбор данного участка объясняется тем, что на этом участке крутизна рабочей характеристики АКФ и ВКФ наибольшая. Кроме того, для известных типов корреляционных функций, встречающихся на практике в различных районах океана этот рабочий участок отличается устойчивым характером наибольшей крутизны. Таким образом, предлагаемый способ, по сравнению с жестким режимом прототипа отличается большей функциональной устойчивостью - устойчивой точностью. Выбор конкретного диапазона определяется целью изобретения - повышение точности. Покажем это на примере. Пусть величина σρ в выражении (3) неизменна. На участке (фиг. 2) ρ1=0,5 =
=  = 1.58, тогда
= 1.58, тогда  =
=  /
/ = σρ/1,58 . Если теперь рассмотрим участок в окрестности ρ2= 0,05, то
= σρ/1,58 . Если теперь рассмотрим участок в окрестности ρ2= 0,05, то  =
=  = 1.03 и
= 1.03 и  = σρ/
= σρ/ /
/ =
=  . Сравнивая величины среднеквадратических оценок измерения τ1 видно, что выигрыш в точности на первом участке по сравнению со вторым составит
. Сравнивая величины среднеквадратических оценок измерения τ1 видно, что выигрыш в точности на первом участке по сравнению со вторым составит  =
=  = 1,53 раза. Аналогичное ухудшении точности произойдет на верхнем участке ρ >0,7 корреляционной функции, характеризуемой меньшей крутизной, если ρ3= 0,995, то
= 1,53 раза. Аналогичное ухудшении точности произойдет на верхнем участке ρ >0,7 корреляционной функции, характеризуемой меньшей крутизной, если ρ3= 0,995, то  =
=  = 0,992, тогда
= 0,992, тогда  = σρ/
= σρ/ /
/ =
=  и сравнивая с первым примером получим ухудшение точности в
и сравнивая с первым примером получим ухудшение точности в  =
=  = 1.59. При изменении величины коэффициента корреляции от 0,3 до 0,05 для сохранения точности определения корреляционной временной задержки необходимо увеличить объем выборки в 5-30 раз. Степень увеличения (5-30) зависит от вида корреляционной функции и метода ее измерения.
= 1.59. При изменении величины коэффициента корреляции от 0,3 до 0,05 для сохранения точности определения корреляционной временной задержки необходимо увеличить объем выборки в 5-30 раз. Степень увеличения (5-30) зависит от вида корреляционной функции и метода ее измерения.
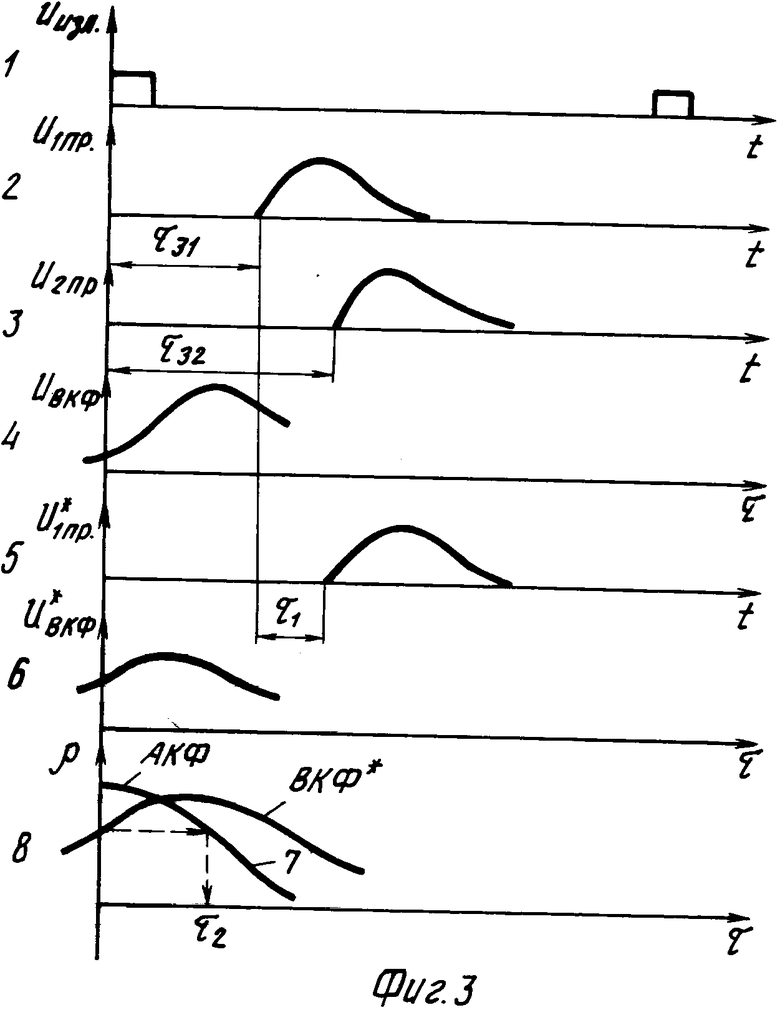
Таким образом, выбор участка рабочей характеристики обеспечивает увеличение точности определения скорости в 1,5 раза. На фиг. 3 приведены графики напряжений для пояснения работы способа в течение цикла излучения - приема в результате которого определяется корреляционная временная задержка (τ1+ τ2). На графиках: 1 - период зондирующих импульсов; 2 и 3 - огибающие сигналов первого и второго приемников, запаздывающих от момента излучения на величины τ31 и τ32 соответственно; 4 - функция коэффициента ВКФ сигналов двух приемников, причем пик функции приходится на τВКФ= τ32- τ31 (при τВКФ= 0 значение коэффициента ВКФ мало и крутизна в районе этой точки также мала); 5 - огибающая сигнала первого (по ходу движения) приемника, задержанная блоком 16 регулируемой временной задержки на величину τ2. В этом случае характер коэффициента ВКФ изменится и приобретет вид, показанный на графике 6, причем пик ВКФ будет соответствовать τВКФ*= τ32-( τ31+ τ 2), а при τВКФ*= 0, значения коэффициента ВКФ и крутизны в этом районе стали больше; 7 - функция коэффициента АКФ второго канала; 8 - процесс определения корреляционной временной задержки при выполнении условия равенства коэффициентов АКФ и ВКФ. Полученное значение τ1 суммируется с τ2, а скорость определяется по формуле (2).
Блоки схемы аналогичны блокам прототипа. В роли новых блоков использованы устройства известной конструкции: блок ручной регулируемой временной задержки, сумматор и стрелочный индикатор (аналоговый).
Применение предлагаемого способа определения скорости звука в жидких средах (в воде) обеспечивает повышение точности за счет повышения точности измерения корреляционной временной задержки, путем смещения расчетов в область рабочей характеристики с большой крутизной. Это достигается введением операции регулируемой временной задержки, операции суммирования ее с корреляционной временной задержкой, определяемой при равенстве коэффициентов АКФ и ВКФ и расчетом скорости по измененной формуле (2). Взаимосвязь существенных признаков предлагаемого изобретения с признаками прототипа позволила достичь положительного эффекта - повышения точности. Достигается дополнительный положительный эффект - получение устойчивой точности измерения при различных характеристиках отражающей поверхности границы раздела сред.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2040010C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ЖИДКИХ СРЕДАХ ВНИЗ ПО ГЛУБИНЕ | 1993 |
|
RU2066852C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА | 1993 |
|
RU2042153C1 |
| Корреляционный гидроакустический лаг | 2018 |
|
RU2680727C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2065176C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА | 1992 |
|
RU2020518C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2042960C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2041478C1 |
| РАДИОВЫСОТОМЕРНАЯ СИСТЕМА С АДАПТАЦИЕЙ К ГЛАДКОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2605442C1 |
| СПОСОБ КЛАССИФИКАЦИИ ЯКОРНОЙ МИНЫ НА ТЕЧЕНИИ | 1993 |
|
RU2040013C1 |
Использование: для определения скорости звука, в частности в воде при гидрологических исследованиях океана. Цель изобретения - повышение точности измерений. Цель достигается тем, что в способе, включающем измерение доплеровского сдвига частоты и корреляционной задержки, последнюю определяют как сумму, первое слагаемое которой равно задержке автокорреляционной функции, зафиксированной при равенстве коэффицинтов авто- и взаимной корреляции, а второе слагаемое равно значению дополнительной регулируемой задержке для огибающей эхо-сигнала первого по движению приемника. Значение дополнительной задержки выбирается таким, чтобы величина коэффициента корреляционной функции находилась в пределах 0,3 - 0,7 от максимума. 3 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ЖИДКИХ СРЕДАХ, заключающийся в том, что в среду излучают звуковые колебания, принимают с помощью не менее двух излучающе-приемных антенн, установленных на движущемся объекте, эхо-сигналы от границы раздела сред, измеряют доплеровский сдвиг частоты эхо-сигналов, подвергают эхо-сигналы взаимной и автокорреляционной обработке, а скорость C звука рассчитывают по формуле
C = s f cos θ / Δ f˙T ,
где s - расстояние между излучающе-приемными антеннами;
f - частота излучаемого звука;
θ - угол между направлением излучения звука и плоскостью антенн;
T - корреляционная временная задержка, при которой значение коэффициентов автокорреляционной функции огибающей эхо-сигнала одной из антенн равно значению коэффициента взаимной корреляции огибающих эхо-сигналов двух антенн,
отличающийся тем, что коэффициенты взаимной и автокорреляции определяют при нулевой задержке, определяют значение дополнительно вносимой регулируемой задержки огибающей эхо-сигнала первой по движению принимающей антенны при условии величины коэффициента взаимной корреляционной функции, равной 0,3 - 0,7 своего максимального значения, а корреляционную временную задержку T определяют как сумму задержки τ1 автокорреляционной функции, зафиксированной при равенстве коэффициентов авто- и взаимной корреляции, измеренной при нулевой задержке, и величины дополнительно вносимой регулируемой задержки τ2 для огибающего эхо-сигнала первой по движению принимающей антенны.
| Способ определения скорости звука в жидких средах | 1988 |
|
SU1580181A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
