Изобретение относится к электромагнитным моделям для исследования распределения скоростей обтекающей объект жидкой среды и может быть использовано в учебном процессе для демонстрации гидродинамического поля вызванных скоростей и давлений, создаваемых рыбами.
Известна модель движущегося объекта, содержащая датчик скорости, подключенный к регистратору величины скорости, вертикальные стойки, пару размещенных параллельно диэлектрических каркасов, имеющих суммарную площадь поперечных сечений каркасов пары, равную площади соответствующего поперечного сечения моделируемого объекта, а также установленных один над другим в вертикальной плоскости и выполненных в виде тел вращения с размещенными снаружи их первой спиралевидной обмоткой, соединенной первым концом с первым выходом источника переменного тока, и второй спиралевидной обмоткой.
Недостатком этой модели являются невысокие дидактические возможности модели.
Цель изобретения расширение дидактических возможностей модели за счет демонстрации распределения скоростей обтекающих объект среды, ограниченной дном водоема, а также для повышения удобства эксплуатации.
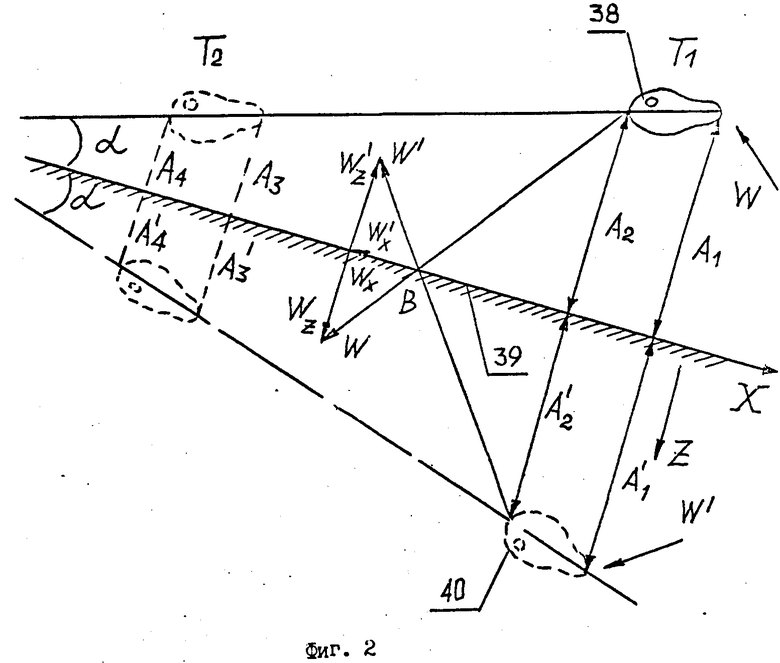
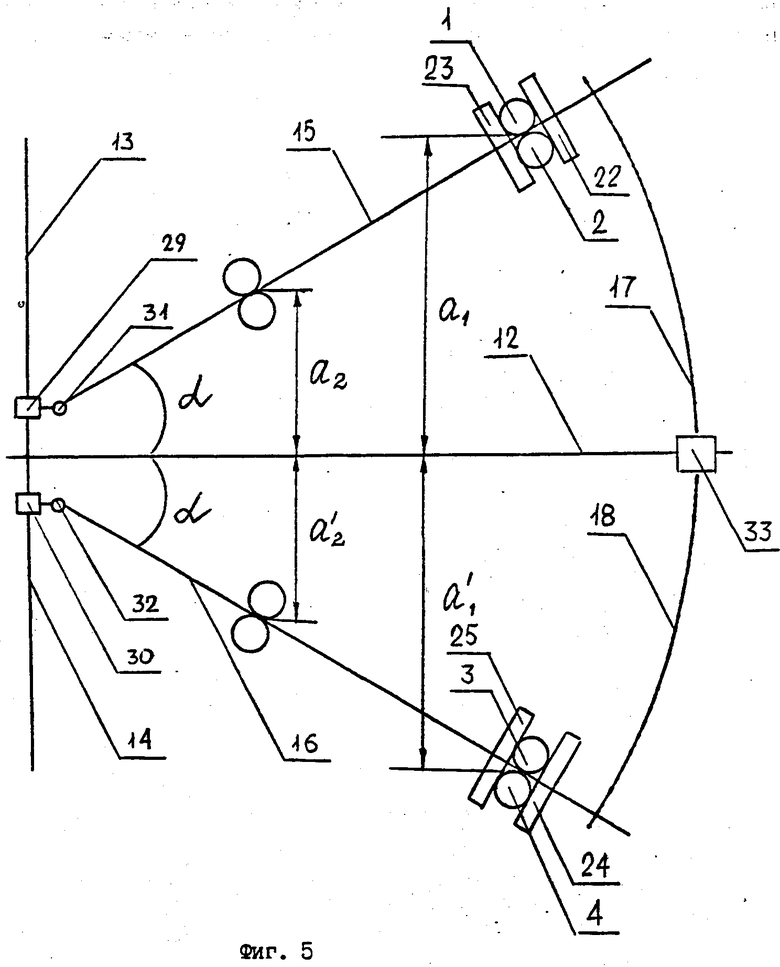
На фиг. 1 представлена блок-схема модели, вид сбоку; на фиг. 2 схема расположения рыбы при ее движении перпендикулярно береговой черте при наклоне дна под углом α; на фиг. 3 схема расположения спиралевидных обмоток, соответствующих схеме на фиг. 2; на фиг. 4 схема расположения рыбы при ее движении вдоль береговой черты при наклоне дна под углом α; на фиг. 5 схема расположения спиралевидных обмоток, соответствующих схеме на фиг. 4.
Модель движущегося объекта содержит первую 1, 2 и вторую 3, 4 пару диэлектрических каркасов, выполненных в виде тел вращения, снаружи которых расположены спиралевидные обмотки 5-8, две вертикальные стойки 9 и 10, горизонтальную перекладину 11, направляющие, горизонтальную 12, вертикальные 13 и 14, наклонные 15 и 16, вертикальные дугообразные 17 и 18.
Устройство имеет также датчик 19 скорости, регистратор 20 величины скорости, источник 21 переменного тока, ползуна 22-25 с выемками 26, штыри 27, отверстия 28, ползуны 29 и 30 с шарнирами 31 и 32, ползун 33 на направляющей 12. Устройство содержит провода 34-37, кроме того тело 38, дно 39 и отображение 40 тела 38 относительно дна 39.
Верхние концы вертикальных стоек 9 и 10 соединены горизонтальной перекладиной 11, на которой установлен один конец горизонтальной направляющей 12. Другой конец направляющей 12 соединяет нижний и верхний концы вертикальных направляющих 13 и 14, соединенных при помощи ползунов 29 и 30 с шарнирами 31 и 32 с наклонными направляющими 15 и 16, взаимоположение которых на дугообразных направляющих 18 и 17 фиксируется штырями 27, вставленными в отверстия 28 этих направляющих. Дугообразные направляющие имеют градусную шкалу и установлены при помощи ползуна 33 на направляющей 12.
Стойки 9 и 10 и вертикальная направляющая 14 имеют одинаковую длину, что обеспечивает устойчивое положение модели.
Каркасы 1, 2 и 3, 4 установлены один над другим в вертикальной плоскости на наклонных направляющих 15 и 16 между ползунами 22-25. По длине направляющих 15 и 16 ползуны 22-25 стопорятся фиксаторами, например штырями 27, вставленными в отверстия 28 ползунов и направляющих.
Спиралевидные обмотки 5, 6 и 7, 8 соединены в парах последовательно, а к источнику переменного тока подключены при помощи проводов 34, 35 и 36, 37 параллельно. При этом первый выход источника переменного тока 21 дополнительно соединен с первым концом третьей спиралевидной обмотки, второй выход источника переменного тока подключен к первым концам второй и четвертой спиралевидных обмоток, а вторые концы первой, второй, третьей и четвертой спиралевидных обмоток электрически связаны. Датчик 19 скорости расположен в пространстве между наклонными 15 и 16 и горизонтальной 12 направляющими.
Работа с моделью осуществляется следующим образом.
Исходя из биометрических показателей рыбы (или технических данных движущегося объекта) вытачивают например, из дерева, в выбранном линейном масштабе (m L/l, где L длина рыбы; l длина каркаса) диэлектрические каркасы 1, 2 и 3, 4, на которые наносят спиралевидные обмотки 5, 6 и 7, 8. Сумма площадей каждого поперечного сечения каркасов 1 4 выбирают равной соответствующей величине поперечного сечения моделируемой рыбы.
Изготавливают все элементы и узлы модели из диэлектрического материала, например дерева, плексиглаза и т.п. монтируют их согласно фиг. 1, выбирая в качестве датчика 19 скорости индукционную катушку, а в качестве регистратора ламповый вольтметр 20.
П р и м е р 1. Необходимо определить гидродинамическое поле рыбы 38, движущейся перпендикулярно береговой черте прямолинейно вдоль наклонного дна 39 (фиг. 2). Во время движения рыба в разные моменты времени Т1 и Т2 по отношению к дну занимает расстояние А1А2, А3А4 и т.д. Устанавливаем при помощи шарниров 31 и 32 наклонные направляющие 15 и 16 под углом α, одновременно при помощи ползунов 29 и 30 и фиксаторов 27 на дугообразных направляющих 17 и 18 подбираем расстояния a1 A1/m, a2 A2/m, a11 A11/m, a21 A12/m от направляющей 12 и при помощи ползунов 22, 23 и 24, 25 располагаем каркасы 1-4 с обмотками 5-8 на направляющих 16 и 15 (фиг. 2 и 3). В этом случае направляющая 12 имитирует дно 39, наклонная направляющая 15 прямолинейное направление движения рыбы 38, а направляющая 16 отображенное от дна прямолинейное направление движения рыбы 38.
В гидромеханике принимают, что движущееся тело в окружающем себя пространстве создает гидродинамическое поле вызванных скоростей W, причем изолинии этого поля выходят из носовой части тела и входят в кормовую его часть (аналогично линейному магниту 6). При определении гидродинамического поля считают, что сквозь дно изолиния не проникает) что и на самом деле так вода сквозь дно не протекает). Для выполнения граничного условия на дне (непротекания воды) размещают относительно дна отображенное типа 40 (как от зеркала) на расстояниях A1 A11, A2 A21 и т.д. Таким образом, рассматривают движение тела 38 и его отображение 40 относительно дна 39 под углом α. Разложив вектор W и его отображение W1 W на составляющие Wz и Wx и Wz1 и Wx1 убеждаемся, что Wz Wz1(взаимно уничтожаются сквозь дно вода не протекает) и Wx Wx1, т.е. вдоль дна Х составляющая удваивается (фиг. 2). При прохождении по обмоткам 5, 6 и 7, 8 переменного тока звуковой частоты (при проведенных опытах 800 Гц) в окружающем модель пространстве возникает переменное магнитное поле Н, которое в соответствии с магнитогидродинамической аналогией (МАГА) имитирует гидродинамическое поле (ГДП) вызванных скоростей W движущейся рыбы (тела) в момент Т1 в условиях наклонного дна, так как в данном случае спиралевидные обмотки 5 и 6 имитируют ГДП рыбы, а 7 и 8 его отображение относительно дна.
Так как согласно МАГА напряженность Н магнитного поля является аналогом вызванной скорости W, то, измерив Н при помощи индукционной катушки в окружающем модель пространства, ограниченном направляющими 12 и1 5 получаем, картину ГДП вызванных скоростей W. Измерение Н осуществляется датчиком скорости, например индукционной катушкой 19, подключенной к регистратору, например ламповому вольтметру 20.
Для исследования ГДП по направлению движения рыбы перемешают каркасы 1, 2 и 3, 4 вдоль направляющих 15 и 16 в положения, соответствующее положению рыбы в момент Т2 (фиг. 2) и снова производят измерение Н, а значит, и значения W. Переход от полученных значений Н к значениям W производят в соответствии с МАГА или путем предварительной тарировки лампового вольтметра в единицах гидродинамического поля.
П р и м е р 2. Необходимо определить гидродинамическое поле (ГДП) рыбы 38, движущейся параллельно береговой черте в условиях вдоль наклонного дна 39 при неизменном расстоянии от него А1 (фиг. 4). В этом случае каркасы 1, 2 и 3, 4 с обмотками 5, 6 и 7, 8 устанавливают согласно фиг. 5 на расстояниях a1 A1/m и a11 A11/m и производят измерение Н предлагаемым способом. Для исследования гидродинамического поля в положении рыбы А2 смещают каркасы 1, 2 и 3, 4 с обмотками в положение a2 A2/m и a21 A21/m и снова производят измерение Н.
Конструкция модели обеспечивает исследование гидродинамического поля рыбы при движении в среде, ограниченной наклонным дном водоема, что расширяет дидактические возможности данного изобретения. Кроме того, наличие в конструкции модели ползунов, шарниров и т.п. обеспечивает удобство эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО ПОЛЯ ПОДВОДНОГО ТРАНСПОРТНОГО ПЛАВСРЕДСТВА | 1995 |
|
RU2080654C1 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1994 |
|
RU2086826C1 |
| ДВИЖИТЕЛЬ ПЛАВСРЕДСТВА | 1992 |
|
RU2068797C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ДВИЖИТЕЛЬ | 1991 |
|
RU2013229C1 |
| РОТОР ТИПА САВОНИУСА С ПОЛЫМИ ЛОПАСТЯМИ | 1994 |
|
RU2101557C1 |
| ВИБРОИЗОЛИРУЮЩАЯ ВСТАВКА В ТРУБОПРОВОД | 1994 |
|
RU2101600C1 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2075667C1 |
| ВОДОЗАБОРНИК СУДОВОЙ ДВИЖИТЕЛЬНОЙ УСТАНОВКИ | 1994 |
|
RU2079420C1 |
| ВОДОЗАБОРНИК БЫСТРОХОДНОГО СУДНА | 1993 |
|
RU2065373C1 |
| ПОЛНОНАПОРНЫЙ ВОДОЗАБОРНИК | 1993 |
|
RU2065374C1 |


Сущность изобретение: модель содержит четыре диэлектрических каркаса 1 4, четыре спиралевидные обмотки 5 - 8, две вертикальные стойки 9 и 10, одну горизонтальную перекладину 11, одну горизонтальную направляющую 12, две вертикальные направляющие 13 и 14, две наклонные направляющие, две вертикальные дугообразующие направляющие 17 и 18, один датчик скорости 19, один регистратор 20 величины скорости, один источник 21 переменного тока, семь палзунов, штыри 27, два шарнира 31 и 32. 5 ил.
МОДЕЛЬ ДВИЖУЩЕГОСЯ ОБЪЕКТА, содержащая датчик скорости, подключенный к регистратору величины скорости, вертикальные стойки, пару размещенных параллельно диэлектрических каркасов, имеющих суммарную площадь поперечных сечений каркасов пары, равную площади соответствующего поперечного сечения моделируемого объекта, а также установленных один над другим в вертикальной плоскости и выполненных в виде тел вращения с размещенными снаружи их первой спиралевидной обмоткой, соединенной первым концом с первым выходом источника переменного тока, и второй спиралевидной обмоткой, отличающаяся тем, что она снабжена горизонтальной перекладиной, горизонтальной, первой и второй вертикальными, первой и второй наклонными и первой и второй вертикальными дугообразными направляющими с ползунами и предназначенными для крепления отверстиями и фиксаторами, аналогичной основной дополнительной парой диэлектрических каркасов с размещенными снаружи их соответственно третьей и четвертой спиралевидными обмотками, при этом горизонтальная перекладина расположена на верхних концах вертикальных стоек, горизонтальная направляющая с ползуном установлена одним концом на горизонтальной перекладине перпендикулярно к ней, а другим концом на верхнем конце нижней вертикальной направляющей с ползуном, верхняя вертикальная направляющая с ползуном закреплена нижним концом на верхнем конце нижней вертикальной направляющей, закрепленные на ползуне горизонтальная направляющая и расположенные сверху и снизу от нее вертикальные дугообразные направляющие, шарнирно соединенные своими первыми концами с ползунами соответствующих вертикальных направляющих наклонными направляющими с парами ползунов, закрепленными своими другими концами на соответствующих вертикальных дугообразных направляющих, при этом на каждой наклонной направляющей между ползунами установлена пара диэлектрических каркасов, причем первый выход источника переменного тока дополнительно соединен с первым концом третьей спиралевидной обмотки, второй выход - подключен к первым концам второй и четвертой спиралевидных обмоток, а вторые концы первой, второй и третьей, четвертой спиралевидных обмоток электрически связаны, при этом датчик скорости расположен в пространстве между наклонными и горизонтальной направляющими.
| Модель движущегося объекта | 1985 |
|
SU1359799A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
