Изобретение относится к цветной металлургии и может быть использовано при управлении работой электролизеров для получения алюминия. При управлении процессом электролиза алюминия одним из важных условий оптимизации режима является стабилизация теплового режима процесса на заданном оптимальном уровне.
Известны методы стабилизации теплового режима электролизера, которые заключаются в измерении температуры электролита и ее стабилизации изменением величины междуполюсного расстояния (авт.св. N 1041607, 831870).
Недостатком этих методов является низкое качество стабилизации теплового режима вследствие отсутствия приборов для непрерывного измерения температуры расплава с требуемой точностью.
Известен способ регулирования теплового режима электролизера, заключающийся в измерении тока и напряжения электролизера, определении количества поданной в электролизер электроэнергии и ее стабилизации изменением положения анода (патент ФРГ N 2335028, 1973).
Недостатком способа является низкое качество стабилизации теплового режима вследствие того, что не учитывается возмущения (изменение формы рабочего пространства, условия охлаждения и пр.).
Известны методы стабилизации теплового режима, заключающиеся в стабилизации на заданном уровне рабочего (пат. США N 3485727 от 23.12.69г.), "приведенного" (пат.Японии 43-8332, 1968, авт.св. 1094405), напряжения электролизера, или его электрического сопротивления (авт.св.749940, 840203, 836229, 982380, пат.Великобритании N 1413727, 1973). При этом "приведенное" напряжение (Uпр.) определяют как
Uпр =  Iн+Eк, (1) а электрическое сопротивление (R) как
Iн+Eк, (1) а электрическое сопротивление (R) как
R =  , (2) где U - измеренное значение напряжения электролизера;
, (2) где U - измеренное значение напряжения электролизера;
I - измеренное значение тока серии;
Iн - номинальное значение тока серии;
Ен - величина обратной ЭДС (обычно принимается равной постоянному значению).
В соответствии с известными способами определяют отклонение регулируемого параметра от его заданного значения и при возникновении отклонения производят пропорциональное перемещение анодного массива в вертикальном направлении.
Недостатком известных способов является частое включение приводов анода, обусловленное резкими изменениями напряжения электролизера и тока серии, особенно при возникновении анодных эффектов на электролизерах серии.
Для снижения частоты включения приводов анода при условии резких изменений тока и напряжения на практике используется метод стабилизации сопротивления с использованием заданной области. Такой метод применяется, например, в способе каскадной автоматической регулировки печи для электролиза алюминия (пат. Японии, заявка N 75-25411, опублик, 1975, заявл. 1969, N 44-55597).
В соответствии с прототипом измеряют ток и напряжение на электролизере, определяют его электрическое сопротивление и в случае, если электрическое сопротивление отличается от его заданного значения больше, чем на величину заданной области значений, производят вертикальное перемещение анода пропорционально отклонению электрического сопротивления от его заданного значения, стабилизируя таким образом сопротивление электролизера. Величину заданного значения сопротивления можно менять в зависимости от различных факторов, влияющих на тепловой баланс электролизера (температура электролита, температура окружающей среды, состав электролита и проч.).
Недостатком прототипа является невысокое качество управления тепловым режимом электролизера, обусловленное наличием заданной области значений сопротивления. Уменьшение области приводит к увеличению частоты включения приводов анода.
Частые перемещения анода препятствуют образованию корки электролита и увеличивают теплопотери от электролизера, что приводит к дополнительному ухудшению качества управления тепловым режимом.
Предлагаемый способ управления тепловым режимом электролизера свободен от перечисленных недостатков и позволяет повысить качество управления без уменьшения заданной области.
Целью предлагаемого способа является повышение качества управления тепловым режимом электролизера за счет снижения частоты управляющих перемещений анода.
Цель достигается тем, что в известном способе управления тепловым режимом электролизера для получения алюминия, включающем измерение напряжения на электролизере и тока через него, определение сопротивления электролизера и его стабилизацию вертикальными перемещениями анода пропорционально отклонению сопротивления от заданной области значений сопротивления, отличающийся тем, что, с целью повышения качества управления тепловым режимом электролизера за счет снижения частоты управляющих перемещений анода, после каждого перемещения анода уменьшают величину заданной области значений сопротивления обратно пропорционально времени, прошедшему от момента перемещения анода, путем уменьшения величины ее верхней границы и увеличения величины нижней границы, определяют среднее отклонение сопротивления от заданного значения за это время и при выходе его на заданную область значений сопротивления перемещают анод пропорционально среднему отклонению сопротивления.
Дополнительная фиксация моментов перемещения анода позволяет определять среднее отклонение сопротивления электролизера от заданного значения сопротивления за увеличивающийся интервал времени, прошедший от момента последнего перемещения анода. Заметная величина этого отклонения свидетельствует о постоянном характере возмущения, т.е. нарушении стабилизации теплового режима, проявляющемся в виде систематической ошибки.
Достоверность этой систематической ошибки растет по мере увеличения интервала времени, на котором она определяется.
Введение заданной области значений сопротивления, уменьшение ее обратно пропорционально времени, прошедшему от момента последнего перемещения анода, позволяет согласовать величину систематической ошибки с достоверностью ее определения.
Дополнительное перемещение анода пропорционально среднему отклонению сопротивления электролизера от заданного значения сопротивления при условии, что величина этого среднего отклонения превышает величину области значений сопротивления, позволяет компенсировать возмущения, имеющие постоянный характер, и повысить качество управления тепловым режимом электролизера.
Применением указанных приемов удается достичь высокой точности стабилизации теплового режима электролизера при невысокой частоте управляющих перемещений анода.
Существенность отличий предлагаемого способа управления обусловлена тем, что дополнительное введение переменной области значений, фиксация моментов перемещения анода, установление величины области значений, равной величине заданной области значений в моменты перемещения анода, и ее уменьшение обратно пропорционально времени, прошедшему от момента последнего перемещения анода, определение среднего отклонения сопротивления электролизера от заданного значения сопротивления за это время и дополнительное перемещение анода пропорционально среднему отклонению сопротивления электролизера от заданного значения сопротивления при выходе этого отклонения за величину области значений сопротивления позволяет согласовать длительность и частоту управляющих перемещений анода с характером возмущений, воздействующих на процесс электролизера, уменьшить частоту перемещений анода без увеличения ошибки регулирования сопротивления и за счет этого повысить качество управления тепловым режимом процесса электролиза.
Способ поясняется фиг.1-3.
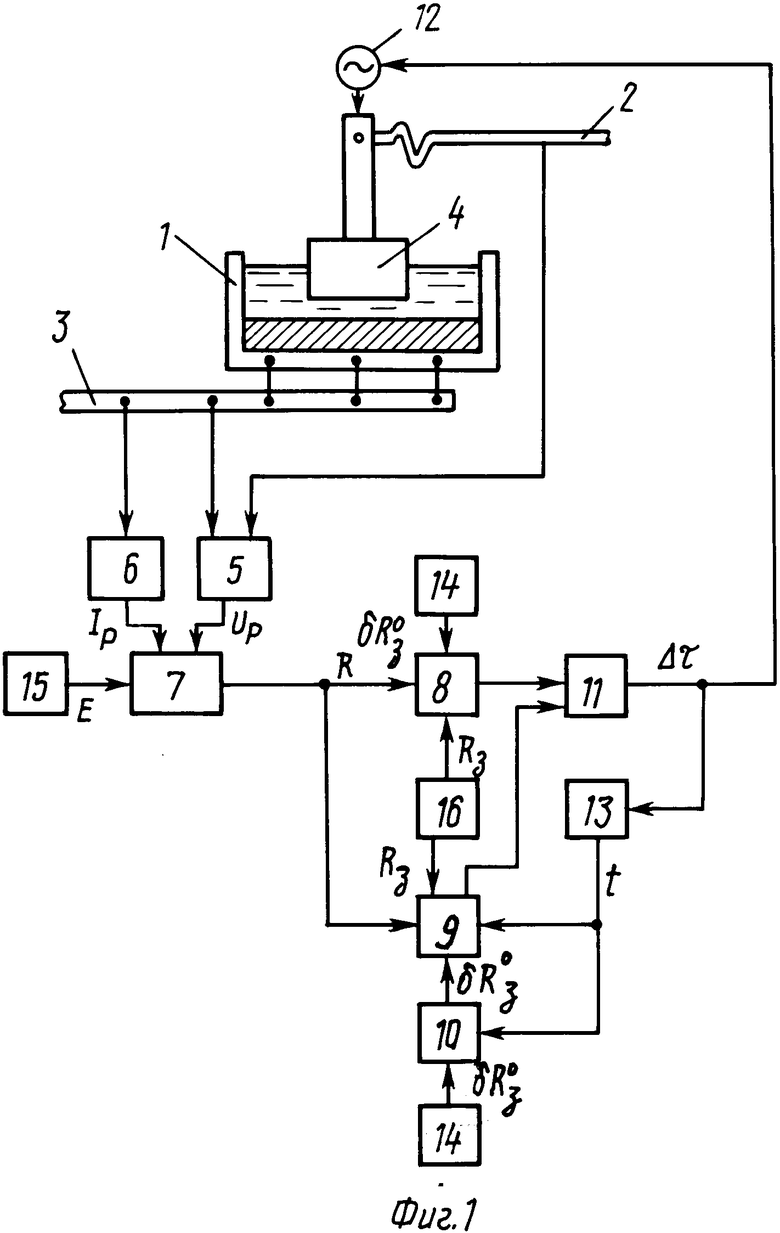
Более подробно сущность и отличительные признаки предлагаемого способа управления иллюстрируется системой управления, реализующей указанный способ (фиг.1) и графиками регулирования сопротивления электролизера при применении способа-прототипа (фиг.2) и предлагаемого способа (фиг.3).
Электролизер 1 (фиг. 1) подключен к анодной 2 и катодной 3 ошиновке и снабжен угольным анодом 4. Рабочее напряжение электролизера Uризмеряется измерителем 5, например преобразователем типа Е-846. Сила тока Iр измеряется измерителем 6, например шунтом с ноpмирующим преобразователем Е-826.
Система управления содержит вычислительный блок 7, блоки определения отклонений 8 и 9, блок изменения переменной области значений сопротивления 10, блок вычисления управляющего воздействия 11, привод анода 12, таймер 13, задатчики 14,15 и 16.
Выходы измерителей 5 и 6 соединены со входами вычислительного блока 7, определяющего значение сопротивления электролизера, например, по формуле
R =  . (3) Величина противоЭДС Е поступает на вход вычислительного блока 7 от задатчика 15.
. (3) Величина противоЭДС Е поступает на вход вычислительного блока 7 от задатчика 15.
Выход вычислительного блока 7 соединен со входами блоков определения отклонений 8 и 9, на другие входы которых подают сигналы с выхода задатчиков 14 и 16 (для блока 8) и с выходов блока изменения переменной области значений 10, таймера 13 и задатчика 16 (для блока 9).
В блоке 8 определяется отклонение ΔR сопротивления электролизера от его заданного значения Rз и проверяется "выход" этого отклонения за заданную область значений сопротивления δ Rоз, например, по формуле
ΔR = Rз - R (4)
При соблюдении условия |ΔR| ≥ | δ Roз| сигнал с выхода блока 8 поступает на вход блока 11 для расчета управляющего воздействия.
В блоке 9 определяется среднее значение отклонения сопротивления ( Δ R)ср от заданного значения за изменяющийся интервал времени t от последнего перемещения анода и проверяется "выход" этого отклонения за область значений сопротивления δRз, например, по формуле
(ΔR)ср =  (Rз-R). (5) При соблюдении условия |( Δ R)ср| ≥ | δ Rз| сигнал с выхода блока 9 поступает на вход блока 11 для расчета управляющего воздействия.
(Rз-R). (5) При соблюдении условия |( Δ R)ср| ≥ | δ Rз| сигнал с выхода блока 9 поступает на вход блока 11 для расчета управляющего воздействия.
Входы блока изменения переменной области значений 10 соединены с выходами таймера 13 и задатчика области значений 14. В блоке 10 производится определение текущего значения переменной области значений сопротивления, например, по формуле
δRз= K δR
δR
На входы блока вычисления управляющего воздействия 11 поступают сигналы с выходов блоков 8 (величина ΔR) и 9 [величина ( Δ R)ср], а выход блока 11 соединен с приводом анода 12, осуществляющим управляющее перемещение анода.
Другой выход блока 11 соединен с входом таймера 13, который начинает новый отсчет времени при очередном включении привода анода.
Вычисление управляющего воздействия осуществляют, например, по формуле
Δ τ = К˙ [ ΔR + (Δ R)ср ], (7) при условии, что (8) где Δ τ - общее управляющее воздействие (длительность перемещения анода, при знаке "+" - подъема анода, при знаке "-" - опускания),
(8) где Δ τ - общее управляющее воздействие (длительность перемещения анода, при знаке "+" - подъема анода, при знаке "-" - опускания),
К - коэффициент регулятора. Первоначальное его значение зависит от конструкции электролизера и характеристики электропривода анода. В процессе управления коэффициент К может корректироваться при настройке системы известными методами по критерию минимизации максимального отклонения сопроттивления эленктролизера от заданного значения.
Блоки 7-11, 13-16 могут быть реализованы программой в УВК (например, СМ-2М), на входы которой подаются соответствующие сигналы от блоков 5,6, а управляющий выход связан с приводом анода 12.
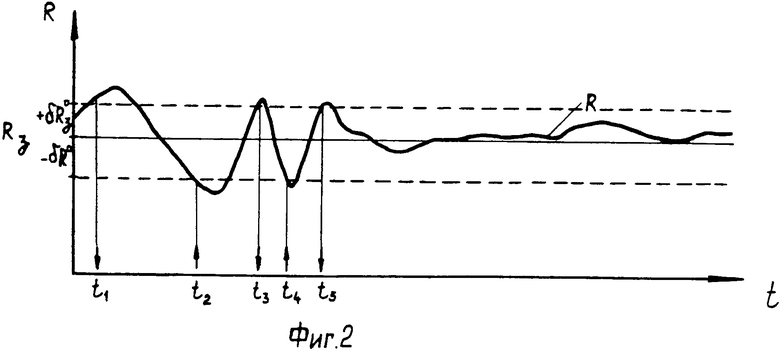
П р и м е р 1. Работа по способу-прототипу, Процесс электролиза проводят в электролизерах типа С175 М3. Заданное значение сопротивления Rз = 13,0 мк˙Ом. Значение постоянной области значений сопротивления δ Rоз = 12,5-13,5 мк˙Ом. Коэффициент регулятора Е = 4,0 с/мк˙Ом. Изменение сопротивления электролизера показано на фиг.2. В моменты времени t1-t5происходит управляющее перемещение анода (направление перемещений отмечено стрелками).
Величина управуляющих воздействий: в моменты времени t1, t3, t5:
Δ τ1 = Δ τ3 = Δ τ5 = К˙ (Rз-R) = 4,0(13,0-13,5) = -2с, ("-" перемещение вниз).
Величина управляющих воздействий в моменты времени t2 и t4:
Δ τ2 = Δ τ4 = 4,0 (13,0-12,5) = 2 с (перемещение вверх)
Результаты работы:
- частота внесения управыляющих воздействий - 32 ед/сутки на электролизер;
- среднеквадратическая погрешность регулирования сопротивления - 0,4 мк˙Ом;
- изменение температуры электролита 955-978оС;
- ориентировочный удельный расход электроэнергии 15900 кВтч/т.
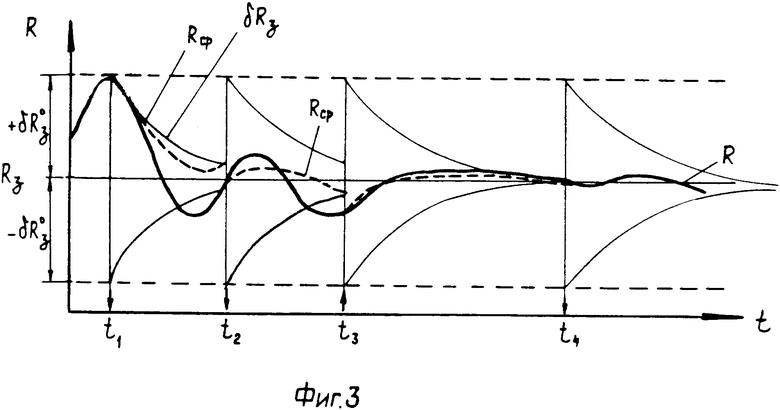
П р и м е р 2. Работа по предлагаемому способу. Процесс электролиза проводят в тех же электроолизерах и при тех же условиях, что в примере 1.
Заданное значение сопротивления Rз = =13,0 мк˙Ом.
Значение заданной области значений сопротивления
δ Rоз = 11,5 - 14,5 мк˙Ом
Коэффициент регулятора К = 4,0 с/мк˙Ом.
Изменение сопротивления электролизера показано на фиг.3.
В момент времени t1 производится управляющее воздействие:
Δ τ1 = K˙(Rз-R) = 4,0(13,0-14,5) = -6 с (перемещение вниз). В этот момент начинается определение среднего отклонения сопротивления от заданного значения
(ΔR)ср = 
 (Rз-R) и определение величины области значений сопротивления
(Rз-R) и определение величины области значений сопротивления
δRз =  R
R
 (Rз-R)≥
(Rз-R)≥  R
R
Δ τ2 = К˙ ( Δ R)ср = 4,0(-0,2) = -0,8 с (перемещение вниз) Аналогично, в момент времени t3
Δ τ3 = 4,0(+0,15) = + 0,6 с (перемещение вверх) и в момент времени t4
Δ τ4 = 4,0 (-0,10) = -0,4 с (перемещение вниз)
Результаты работы:
- частота внесения управляющих воздействий - 18 ед/сутки на электролизер;
- среднеквадратическая погрешность регулирования сопротивления - 0,05 мк˙Ом;
- изменение температуры электролита 960-970оС;
- ориентировочный удельный расход электроэнергии 15600 кВт ˙ч/т.
Внедрение предлагаемого способа позволяет снизить погрешность регулирования сопротивления до ± 0,05 мк˙Ом и частоту управляющих воздействий, повысить стабильность теплового режима (колебания температуры расплава не превышают 965 ± 5,0 оС) и за счет этого, по экспертной оценке, снизить частоту анодных эффектов и расход электроэнергии на 300 кВт ˙ч/т алюминия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ЭЛЕКТРОЛИТИЧЕСКОГО ПОЛУЧЕНИЯ АЛЮМИНИЯ В ЭЛЕКТРОЛИЗЕРЕ | 1990 |
|
RU2023058C1 |
| СПОСОБ УПРАВЛЕНИЯ АЛЮМИНИЕВЫМ ЭЛЕКТРОЛИЗЕРОМ | 1996 |
|
RU2106435C1 |
| Способ автоматического регулированияэНЕРгЕТичЕСКОгО РЕжиМА АлюМиНиЕВОгОэлЕКТРОлизЕРА | 1979 |
|
SU836229A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОДИНАМИЧЕСКОЙ СИЛЫ ТОКА ПРИ ПЕРЕМЕННОМ НАПРЯЖЕНИИ И СОПРОТИВЛЕНИИ ЦЕПИ | 2012 |
|
RU2511648C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ГЛИНОЗЕМА В ЭЛЕКТРОЛИЗЕР ПРИ ПОЛУЧЕНИИ АЛЮМИНИЯ | 2014 |
|
RU2596560C1 |
| Способ автоматического регулирования алюминиевых электролизеров | 1977 |
|
SU742491A1 |
| УСТРОЙСТВО для ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПОЛУЧЕНИЯ АЛЮМИНИЯ В ЭЛЕКТРОЛИЗНОЙ ВАННЕ | 1973 |
|
SU378531A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ЭЛЕКТРОЛИТИЧЕСКОГО ПОЛУЧЕНИЯ АЛЮМИНИЯ | 2002 |
|
RU2237753C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЕПЛОВЫМ РЕЖИМОМ АЛЮМИНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 2002 |
|
RU2217528C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОЛИЗЕРА | 2002 |
|
RU2280716C2 |
Способ управления тепловым режимом в электролизерах для получения алюминия, включает измерение напряжения на электролизере и тока через него, определение сопротивления электролизера и его среднего значения за интервал времени от последнего перемещения анода, сравнение этих параметров с заданным значением сопротивления и перемещение анода при выходе хотя бы одного из этих параметров за величину своей области значений сопротивления. Область значений для сопротивления электролизера устанавливают расширенной и постоянной, а область значений для среднего значения сопротивления устанавливают равной величине постоянной области значений в момент каждого перемещения анода и уменьшают ее обратно пропорционально времени, прошедшему от момента последнего перемещения анода. Способ позволяет стабилизировать тепловой режим работы электролизера и снизить частоту управляющих воздействий. 3 ил.
СПОСОБ УПРАВЛЕНИЯ ТЕПЛОВЫМ РЕЖИМОМ ЭЛЕКТРОЛИЗЕРА ДЛЯ ПОЛУЧЕНИЯ АЛЮМИНИЯ, включающий измерение напряжения на электролизере и тока через него, определение сопротивления электролизера и его стабилизацию вертикальными перемещениями анода пропорционально отклонению сопротивленния от заданной области значений сопротивления, отличающийся тем, что, с целью повышения качества управления тепловым режимом электролизера за счет снижения частоты управляющих перемещений анода, после каждого перемещения анода уменьшают величину заданной области значений сопротивления обратно пропорционально времени, прошедшему от момента перемещения анода, путем уменьшения величины ее верхней границы и увеличения величины нижней границы, определяют среднее отклонение сопротивления от заданного значения за это время и при выходе его за заданную область значений сопротивления перемещают анод пропорционально среднему отклонению сопротивления.
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
