Изобретение относится к гидроэнергетике и может быть использовано, например, в волновых электростанциях для выработки электроэнергии.
Цель изобретения - повышение КПД.
Поставленная цель достигается тем, что в способе, включающем возвратно-поступательное перемещение опоры с вращающимся дебалансом и ее поочередным взаимодействием с неподвижным упорами и упорами, расположенными на плавучей платформе, осуществляют предварительную раскрутку дебаланса до частоты, большей частоты воздействующей волны, после чего при нахождении ниже оси вращения фиксируют опору при подъеме волны с упорами платформы, при спаде волны - с неподвижными упорами, а при нахождении дебаланса выше оси вращения осуществляют обратную фиксацию опоры с упорами.
Устройство, содержащее неподвижную опору с вертикальными стойками, расположенными между последними с возможностью вертикального возвратно-поступательного перемещения горизонтальную опору с дебалансом и плавучую платформу с генератором электрического тока и датчиком инерционных сил, при этом дебаланс установлен на горизонтальном валу с возможностью вращения, а горизонтальная опора кинематически связана с плавучей платформой и неподвижной опорой, снабжено двухпозиционными кранами и золотниками, неподвижная опора - горизонтальной перекладиной, прикрепленной к вершинам стоек, а кинематическая связь горизонтальной опоры выполнена в виде двух вертикально расположенных гидроцилиндров, гильзы которых неподвижно прикреплены к нижней и верхней частям горизонтальной опоры, шток поршней - шарнирно к платформе и горизонтальной перекладине, а штоковые и подпоршневые полости каждого гидроцилиндра сообщены между собой при помощи упомянутых кранов и золотников, причем первые связаны с датчиком инерционных сил платформы, а последние - с валом дебаланса.
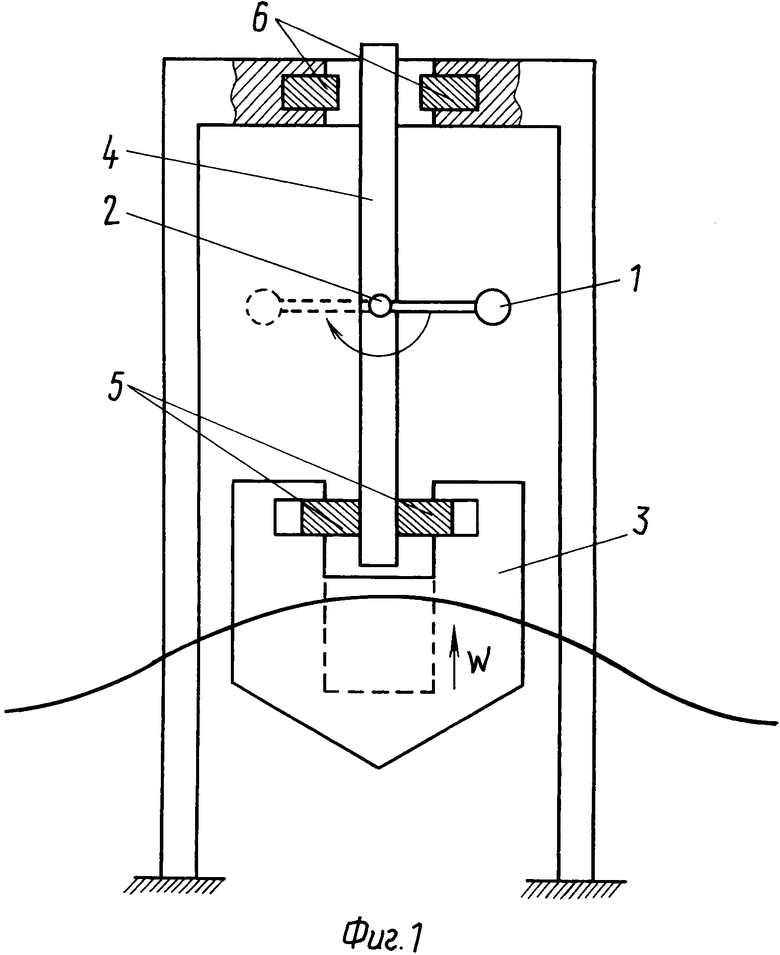
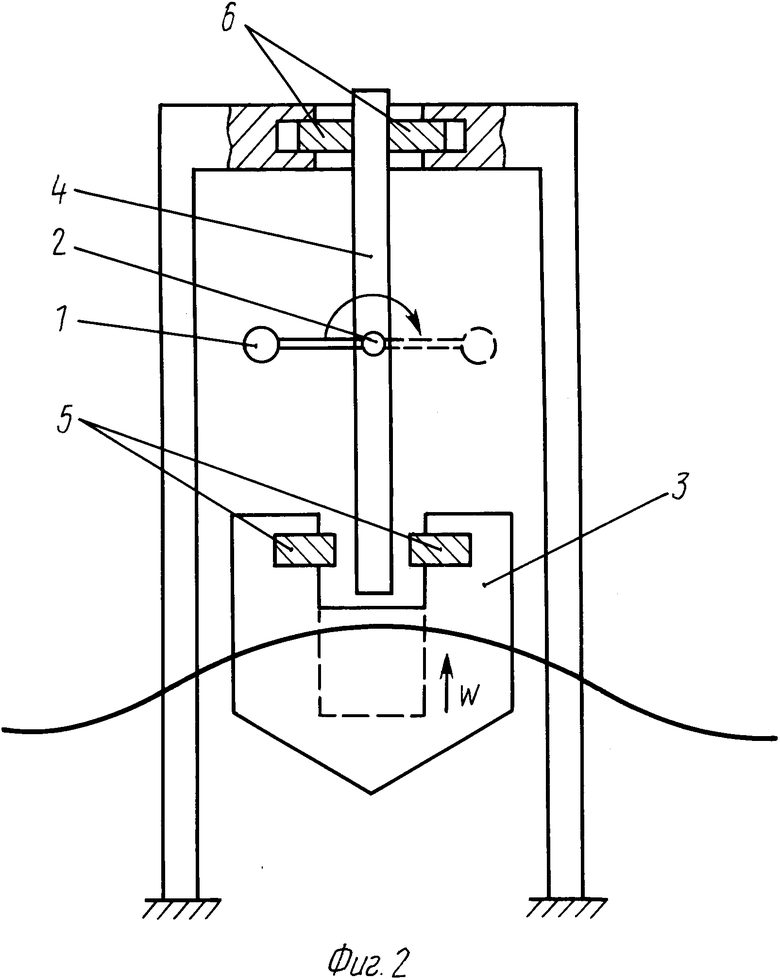
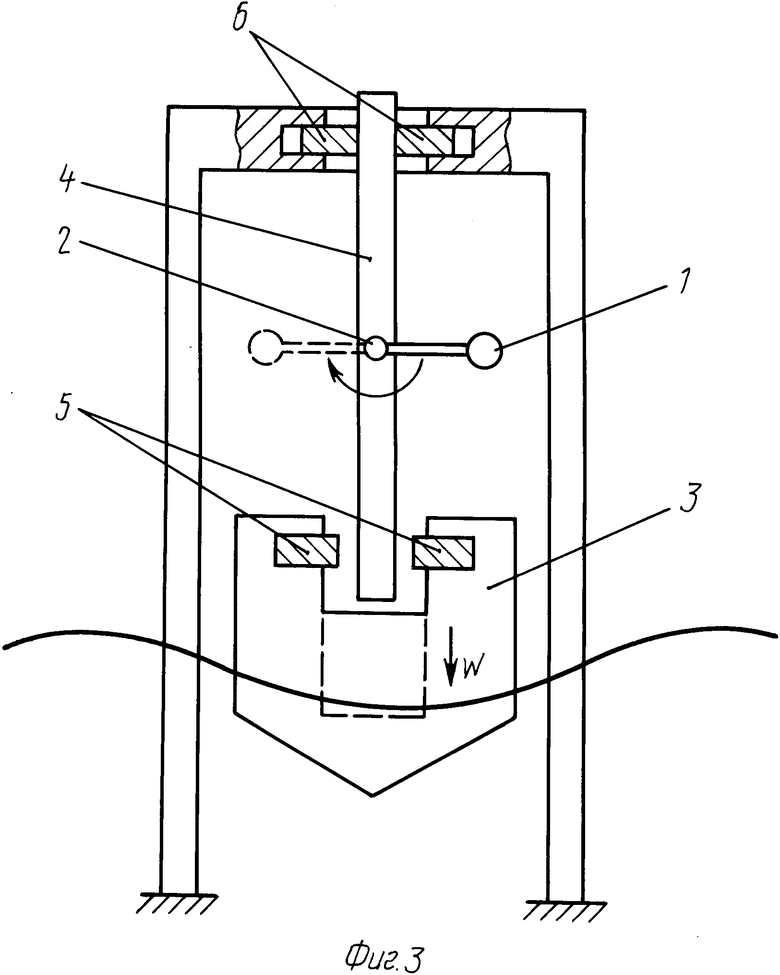
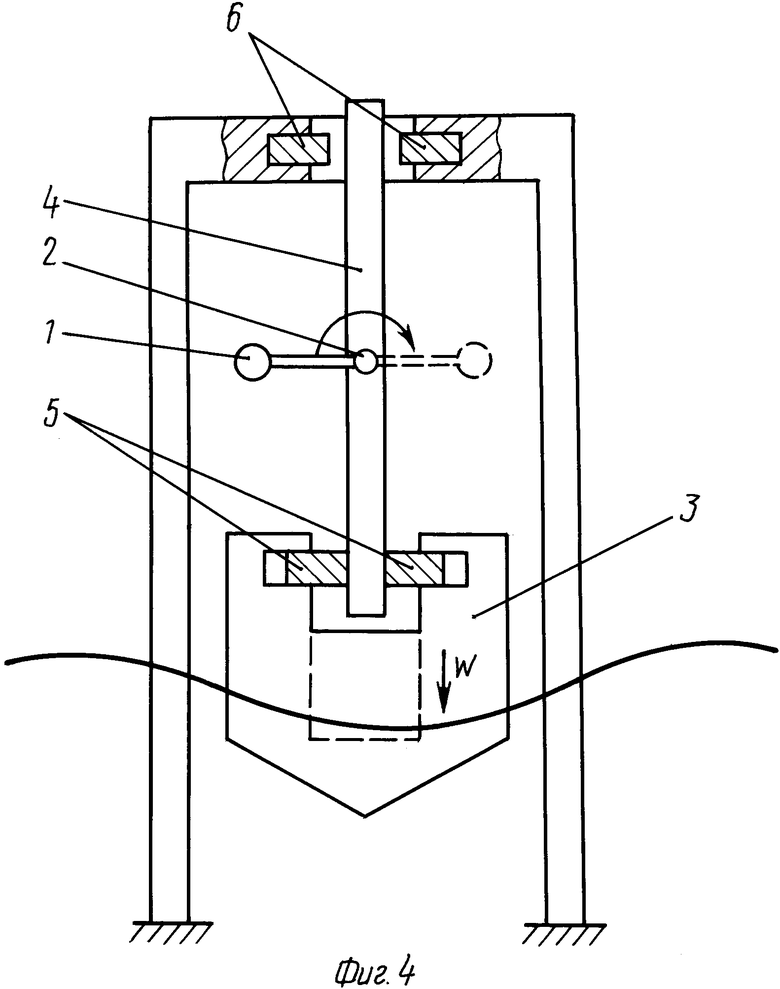
На фиг. 1 и 2 изображено предлагаемое устройство, положение элементов при подъеме фронта волны; на фиг.3 и 4 - то же, при спаде фронта волны.
Способ осуществляется следующим образом. Дебалансу 1 задают вращение с частотой, превышающей частоту колебания фронта волны, например, в направлении, указанном стрелкой на фиг.1-4. Затем определяют угол поворота оси 2 дебаланса 1. В положении начала прохождения нижней полуокружности дебалансом 1 при подъеме со скоростью W фронта волны с плавучей платформой 3 опору 4 оси 2 фиксируют с упором 5 платформы 3 и перемещают ось 2 дебаланса 1 совместно с платформой 3 против действия инерционных сил до момента, когда положение дебаланса 1 (см. фиг.2) соответствует началу прохождения верхней полуокружности, т. е. ось 2 дебаланса 1 поворачивается на половину периода (180о) вращения дебаланса 1, при этом линейная скорость центра масс дебаланса 1 получает приращение ΔV = 2W. В положении дебаланса 1 (см.фиг.2) опору 4 с упором 5 расфиксируют и одновременно опору 4 фиксируют с неподвижным упором 6, при этом платформа 3 продолжает свободно перемещаться вверх, ось 2 неподвижно фиксируется с упором 6, а дебаланс 1 без изменения своей скорости проходит верхнюю полуокружность своей траектории, т.е. поворачивается еще на половину периода до положения, соответствующего моменту начала прохождения нижней полуокружности (см.фиг.1). В этот момент опору 4 с неподвижным упором 6 расфиксируют и одновременно опору 4 фиксируют с упором 5 плавучей платформы 3 и снова перемещают ось 2 дебаланса 1 совместно с плавучей платформой 3. Таким образом, за весь полупериод подъема фронта волны происходит ускорение вращения дебаланса 1, причем количество силовых взаимодействий оси 2 дебаланса 1 и плавучей платформы 3 равно числу оборотов дебаланса 1 за один полупериод колебания волны. При изменении знака действия внешних сил, т.е. при спаде фронта волны, определяемого следящим за волной устройством, процесс преобразования движения осуществляется в такой же последовательности, но со сдвигом фазы (угла поворота) оси 2 дебаланса 1 на половину периода (см.фиг.3). При прохождении дебалансом 1 нижней полуокружости траектории опору 4 фиксируют с неподвижным упором 6, при этом с упором 5 опора 4 расфиксируется, плавучая платформа 3 свободно перемещается вниз, а ось 2 дебаланса 1 фиксируется относительно неподвижного упора 6 и дебаланс 1 без изменения своей скорости проходит нижнюю полуокружность до положения, соответствующего моменту начала прохождения верхней полуокружности (см.фиг.4). При прохождении дебалансом 1 верхней полуокружности при спаде фронта волны (см.фиг.4) опору 4 фиксируют с упором 5 плавучей платформы 3, а неподвижный упор 6 при этом расфиксируют, и ось 2 дебаланса 1 ходом плавучей платформы 3 перемещают против действия инерционных сил, в результате чего линейная скорость центра масс дебаланса 1 получает приращение ΔV = 2W уже на спаде фронта волны. За весь период спада фронта волны происходит также ускорение вращения дебаланса 1, при этом количество силовых взаимодействий оси 2 дебаланса 1 и плавучей платформы 3 равно числу оборотов дебаланса 1 за второй полупериод колебания волны. Суммарное приращение линейной скорости центра масс дебаланса 1 за один период колебания морской волны составляет величину ΔV = 2nW, где n - число оборотов дебаланса за период колебания волны; W - осредненная скорость подъема и спада фронта волны.
Таким образом, осуществляется преобразование энергии волн с параметрами, меняющимися по случайному закону, в энергию ускоренного вращения дебаланса без процессов согласования частоты колебания волн и вращающегося неуравновешенного ротора-дебаланса с последующим съемом энергии с дебаланса через кинематическую связь на генератор электрического тока.
Способ преобразования энергии волн имеет следующие преимущества по сравнению с известными: многократное приращение энергии от источника колебаний, соответствующего количеству оборотов ротора-дебаланса за один период колебания; скорость вращения дебаланса может быть достаточно высокой и определяться только прочностью конструкции; обеспечивать регулирование числа оборотов ротора путем изменения количества отбираемой мощности от устройства и обеспечивать оптимальные режимы работы процессов преобразования.
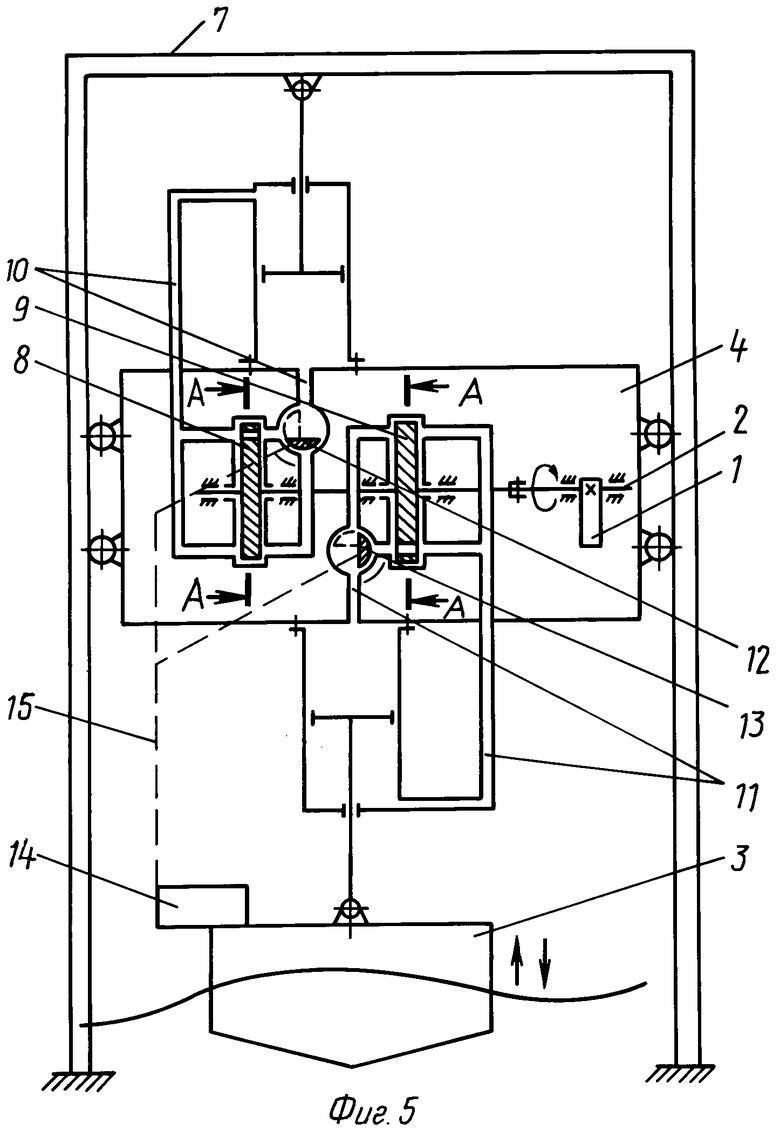
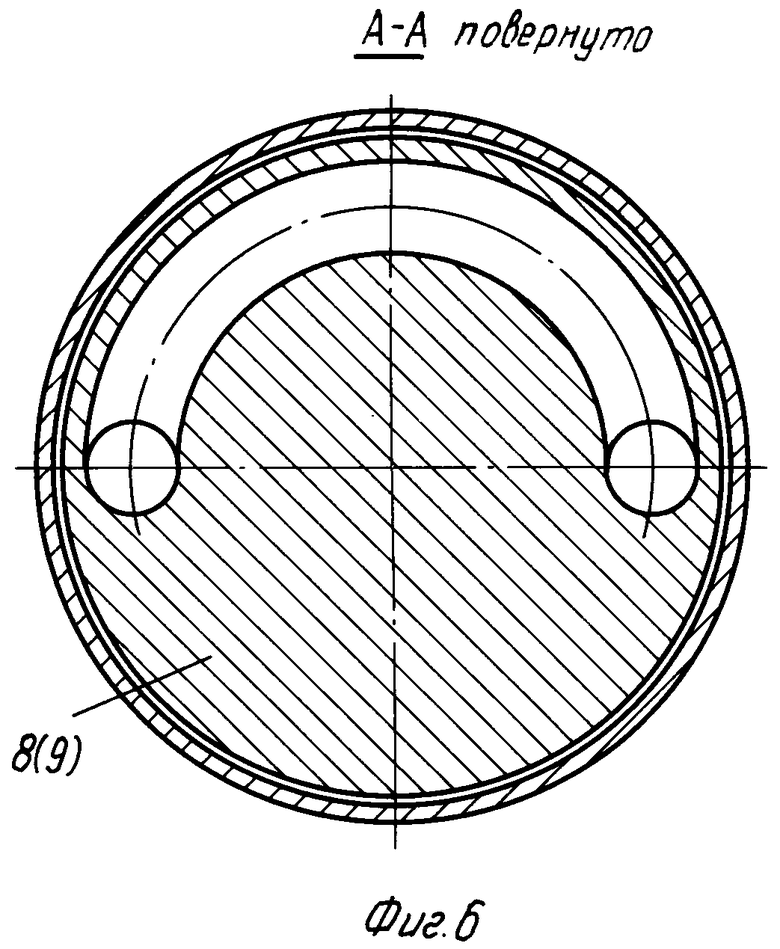
На фиг. 5 приведена общая схема предлагаемого устройства; на фиг.6 - разрез А-А на фиг.5.
Устройство содержит неуравновешенный ротор-дебаланс 1, вращающийся с валом 2, плавучую платформу 3, подвижную опору 4, на которой размещен дебаланс 1 с валом 2 отбора мощности (опора 4 повернута в плоскость чертежа). Опора 4 соединена посредством гидроцилиндров с плавучей платформой 3 и горизонтальной перекладиной 7, приклеенной к неподвижным заякоренным стойкам (неподвижная опора). В качестве неподвижных стоек может быть динамический якорь. Жестко с валом 2 соединены золотники 8 и 9. Перед золотниками на магистралях 10 и 11, предназначенных для перетекания рабочего тела, установлены двухпозиционные краны 12 и 13, а датчик 14 инерционных сил посредством управляющей связи 15 соединен с двухпозиционными кранами 12 и 13. Магистрали 10 и 11 соединяют полости гидроцилиндров. На плавучей платформе 3 установлен также генератор электрического тока, соединенный кинематический связью с валом 2 отбора мощности.
Способ преобразования энергии волн в электрическую энергию осуществляется следующим образом. Вал 2 с дебалансом 1, соединенный жесткой механической связью с золотниками 8 и 9, раскручивают до частоты вращения, большей чем частота колебаний плавучей платформы 3. При этом в фазе подъема фронта волны с плавучей платформой 3 положение двухпозиционных кранов 12 и 13 показано на фиг.5. Вращающийся дебаланс 1 с валом 2, проходя нижнюю и верхнюю полуокружности, своей траектории соответственно поворачивают золотники 8 и 9, при этом прохождение дебалансом 1 нижней полуокружности траектории золотник 8 в соответствии с положением двухпозиционного крана 12 на половину оборота дебаланса 1 открывает магистраль 10 для свободного перетекания рабочего тела гидроцилиндра из подпоршневой полости в штоковую, а золотник 9 в соответствии с положением двухпозиционного крана 13 на ту же половину оборота дебаланса 1 закрывает магистраль 11 и рабочее тело из подпоршневой полости гидроцилиндра в штоковую полость не перетекает. Между плавучей платформой 3 и опорой 4 с вращающимся дебалансом 1 образуется жесткая связь (используется свойство несжимаемости жидкости как рабочего тела) и опора 4 с дебалансом 1 перемещается вверх против действия инерционных сил, в результате чего дебаланс 1 получает приращение скорости. В момент времени, соответствующий началу прохождения дебалансом 1 верхней полуокружности, золотник 8 в соответствии с положением двухпозиционного крана 12 и 15 перекрывает магистраль 10 на вторую половину оборота вала 2 дебаланса 1, а золотник 9 открывает магистраль 11 на эту же половину периода для свободного перетекания рабочего тела гидроцилиндра из подпоршневой полости в штоковую. Между опорой 4 и дебалансом 1 и горизонтальной перекладиной 7 образуется жесткая связь и вал 2 дебаланса 1 с опорой 4 фиксируется, а плавучая платформа 3 свободно поднимается вверх, дебаланс 1 в этот полупериод вращения своей скорости не изменяет. Такой цикл ускорения вращения дебаланса 1 осуществляется до конца подъема фронта волны с плавучей платформой 3, причем собственным вращением независимо от его частоты посредством золотников 8 и 9 дебаланс 1 обеспечивает многократное приращение своей скорости.
При изменении знака действия внешних сил, т.е. при спаде фронта волны с плавучей платформой 3, датчик 14 инерционных сил посредством управляющей связи 15 обеспечивает поворот двухпозиционных кранов 12 и 13 на 90о в направлении, указанном на фиг. 5 стрелками так, что направление течения рабочего тела по магистралям 10 и 11 смещается относительно проходных отверстий золотников 8 и 9 на 180о (половину оборота дебаланса 1), в соответствии с формой проходного сечения золотников 8 и 9. В этом случае на участке спада фронта волны с плавучей платформой 3, при прохождении дебалансом 1 нижней полуокружности, золотник 8 в соответствии с повернутым положением вентиля 12 перекрывает магистраль 10 и между опорой 4 с дебалансом 1 и перекладиной 7, прикрепленной к неподвижным заякоренным стойкам, образуется жесткая связь. Дебаланс 1 при этом не изменяет скорость в течение половины оборота, а золотник 9 в соответствии с повернутым положением двухпозиционного крана 13 открывает на эту половину оборота дебаланса 1 магистраль 11, и рабочее тело перетекает из штоковой полости гидроцилиндра в подпоршневую полость. Плавучая платформа 3 свободно перемещается вниз. При прохождении дебалансом 1 верхней полуокружности на участке спада волны золотник 9, связанный с валом 2, открывает магистраль 10 для свободного перетекания рабочего тела между полостями гидроцилиндра, при этом жесткая связь между опорой 4 и перекладиной 7, прикрепленной к неподвижным заякоренным стойкам, снимается. В этот же полупериод оборота дебаланса 1 золотник 9 перекрывает магистраль 11, рабочее тело гидроцилиндра "запирается" и между опорой 4 устанавливается жесткая связь; плавучая платформа 3 перемещается вниз вместе с опорой 4, дебалансом 1, и последний при этом получает приращение скорости. Далее циклы ускорения дебаланса 1 повторяются до начала подъема фронта волны. Датчик инерционных сил вновь посредством управляющей связи возвращает двухпозиционные краны 12 и 13 в начальное положение и устройство продолжает работать по описанной последовательности.
Съем энергии с дебаланса 1 осуществляется по достижении расчетной скорости вращения дебаланса 1 генератором электрического тока посредством кинематической связи генератора с валом 2 отбора мощности в любой из периодов подъема или опускания плавсредства на волне.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСКОРЯЮЩАЯ СИСТЕМА | 1988 |
|
SU1639406A1 |
| ВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 1997 |
|
RU2128784C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ИЗ МОРСКИХ ТЕЧЕНИЙ | 2009 |
|
RU2422671C1 |
| Агрегат для термической обработки штанг | 1976 |
|
SU704993A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВОЛН (ВАРИАНТЫ) | 2014 |
|
RU2559956C1 |
| ГИДРОАГРЕГАТ | 2006 |
|
RU2325549C1 |
| СПОСОБ УТИЛИЗАЦИИ ЭНЕРГИИ ВОЗОБНОВЛЯЮЩИХСЯ ИСТОЧНИКОВ (ВАРИАНТЫ) И МОДУЛЬ ЭНЕРГОСТАНЦИИ МОЩНОСТЬЮ ДО МЕГАВАТТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2150021C1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
Использование: гидроэнергетика, волновые электростанции. Сущность изобретения: в устройстве, содержащем неподвижную опору с вертикальными стойками, расположенные между последними с возможностью вертикального возвратно-поступательного перемещения горизонтальную опору с дебалансом и плавучую платформу с датчиком инерционных сил, причем дебаланс установлен на горизонтальном валу отбора мощности с возможностью вращения, а горизонтальная опора кинематически связана с плавучей платформой и неподвижной опорой, осуществляют предварительную раскрутку дебаланса до частоты, большей частоты воздействующей волны, после чего при нахождении дебаланса ниже оси вращения фиксируют опору при подъеме волны с упорами платформы, при спаде волны - с неподвижными упорами, а при нахождении дебаланса выше оси вращения осуществляют обратную фиксацию опоры с упорами, причем фиксацию опоры осуществляют с помощью гидравлической схемы, содержащей два гидроцилиндра и два двухпозиционных крана с золотниками. 2 с.п.ф-лы, 6 ил.
| Авторское свидетельство СССР N 1831008, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
