Изобретение относится к области дорожного строительства, а именно к технологии и копровому оборудованию для забивания и извлечения из грунта металлических столбиков, и может быть использовано преимущественно при возведении и ремонте барьерных ограждений автомобильных дорог.
Известны способы и копровое оборудование для забивания и извлечения из грунта различного рода свайных элементов и металлических столбиков барьерных ограждений автомобильных дорог (см., например, авт. свид. SU 746041, E 02 D 7/16, 1980 г.; пат. US 5494117, E 02 D 7/10, 1994 г.; пат. JP 63-78920, E 02 D 7/02, 11/00, 1988 г. по заявке JP 61-222894 от 20.09.1986 г., авт. и заявитель Такэути Томоеси).
Большая часть известного копрового оборудования представляет собой достаточно сложные и громоздкие специализированные установки со свайными погружателями на основе дизель-молотов, стационарно смонтированные на стреловых грузоподъемных кранах (см., например, SU 746041). Используют такое копровое оборудование в основном при погружении и извлечении из грунта длинноразмерных свай на строительных площадках, где отсутствуют ограничения по перекрытию проезжей части дорог при производстве работ. При многих положительных качествах входящие в его состав дизель-молоты характеризуются неудовлетворительным пуском в действие при погружении свайных элементов в слабые грунты и при низкой температуре окружающего воздуха.
Позиционирование и укладка копрового оборудования в транспортное положение и перевод из него в рабочее в таких установках достаточно трудоемки. Указанное обстоятельство обусловлено в основном тем, что используемые в их составе грузоподъемные средства имеют крановые стрелы с постоянным либо только телескопируемым вылетом, обладающие гораздо меньшими возможностями пространственного манипулирования по сравнению с многозвенными шарнирно-рычажными поворотными стрелами гидравлических манипуляторных установок, а системы подвеса на них и позиционирования ударного рабочего органа сложны в конструктивном исполнении. Монтаж и демонтаж копрового оборудования в таких установках занимает много времени.
Вследствие особенностей конструктивного исполнения и отмеченных недостатков известных копровых установок данного типа использование их для забивания и извлечения из грунта металлических столбиков барьерных ограждений автомобильных дорог нецелесообразно.
Свободен, в какой-то мере, от многих из вышеперечисленных недостатков известный механический забойщик металлических стоек ограждения с подвешиваемым на тросе гидравлическим забивочным устройством по пат. US 5494117. Указанный забойщик достаточно прост и компактен в конструктивном исполнении и не требует перекрытия проезжей части дороги при производстве работ. Однако он обладает существенным недостатком, обусловленным необходимостью ручной ориентации и удержания оператором забивочного устройства при погружении столбиков в грунт.
При этом в результате прямого контакта оператора в процессе погружения столбиков в грунт с забивочным устройством ударного типа он подвергается воздействию вибрационных нагрузок и шума, что при достаточно длительной работе может привести к соответствующим профессиональным заболеваниям.
Для обеспечения устойчивой работы большинства из отечественных гидромолотов необходимо гарантированное поджатие их к забиваемому столбику, величина которого в зависимости от типа гидромолота может достигать нескольких сотен килограммов. Реализовать такое поджатие вручную в механических забойщиках рассматриваемого типа практически невозможно.
Механические нагрузки, реализуемые при извлечении столбиков из грунта при помощи такого копрового оборудования, действуют непосредственно на используемое для подвеса гидромолота стреловое оборудование и шасси базовой машины, что в общем-то, нежелательно из-за их большой величины.
Из числа известных аналогов заявляемого технического решения ближайшим (прототипом) может служить "Способ забивания и извлечения из грунта металлических столбиков и копровый манипулятор для его осуществления" по пат. JP 63-78920, E 02 D 7/02, 11/00, 1988 г. Используемый для осуществления указанного известного способа копровый манипулятор представляет собой узкоспециализированную машину, предназначенную для забивания и извлечения из грунта металлических столбиков, преимущественно при возведении и ремонте барьерных ограждений автомобильных дорог.
Конструктивно он состоит из автомобильного тягача, размещенной на нем манипуляторной установки, мобильного копра, выполненного на основе смонтированного на подвижной каретке гидромолота и приводного гидроцилиндра ее перемещения, и гидросистему с насосом, маслобаком, гидрораспределителями и соответствующими коммуникационными магистралями.
Манипуляторная установка в самом общем виде представляет собой установленную в кузове автомобильного тягача телескопически выдвигаемую в поперечном направлении балку, на консольной части которой шарнирно закреплена поворотная мачта (направляющая рама).
Посредством телескопического выдвижения указанной балки мачта манипуляторной установки может плоско-параллельно выноситься в поперечном направлении и при помощи соответствующих гидроцилиндров приводиться к вертикали.
Очевидно, что исполнение данной балки манипуляторной установки только телескопической существенно уменьшает возможности пространственного манипулирования копром в процессе его позиционирования на участке проведения работ по сравнению с шарнирно-рычажными поворотными стрелами гидравлических установок крано-манипуляторного типа.
Каретка копра с установленным на ней гидромолотом подвешена при помощи цепи на поворотной мачте манипуляторной установки с возможностью возвратно-поступательного перемещения по ее направляющим.
В конструкции копра известного манипулятора имеются шарнирно закрепленная на поворотной мачте подающая рама, предназначенная для подачи столбиков, которая может раскрываться и закрываться за счет поворота относительно ее передней поверхности, а также установленный на нижнем конце мачты специальный механизм для перемещения и остановки захваченного столбика.
Питание гидроцилиндров манипуляторной установки и копра, а также его гидромолота рабочей жидкостью осуществляется от автономной гидросистемы, содержащей насос с маслобаком, гидрораспределителями и соответствующими коммуникационными магистралями.
Указанная гидросистема конструктивно выполнена в виде отдельного модуля, размещенного на дне кузова автомобильного тягача, рядом с манипуляторной установкой.
Забивание столбиков с использованием данной машины осуществляют следующим образом.
Перед выездом на место проведения работ манипуляторную установку с копром переводят в транспортное положение, для чего телескопическое выдвижное звено поперечной балки манипуляторной установки втягивают вовнутрь и наклоняют ее мачту вниз с ориентацией вдоль борта кузова посредством соответствующего поворота в горизонтальной плоскости.
Затем размещенную таким образом на автомобильном тягаче манипуляторную установку с мобильным копром и уложенными на дно кузова столбиками доставляют своим ходом на участок проведения работ, устанавливают тягач на дороге, вблизи ее обочины, параллельно размеченной под забивку столбиков трассе, переводят копер из транспортного положения в рабочее, осуществляют позиционирование копра относительно забоя, устанавливают столбик в рабочее положение с обеспечением поджатия его к грунту и включают гидромолот копра, который забивает столбик в грунт на необходимую глубину, после чего гидромолот выключают и, подняв его в крайнее верхнее положение, перемещают копер на очередную позицию.
При этом доставка столбиков к месту проведения работ в больших объемах осуществляется отдельным транспортным средством.
Разгрузку столбиков на участке проведения работ осуществляют вручную, либо с использованием дополнительного грузоподъемного средства.
Грубое (предварительное) позиционирование копра известного манипулятора относительно забоя осуществляют посредством соответствующего маневрирования автомобильного тягача.
Окончательное (более точное) позиционирование копра производят соответствующим пространственным перемещением мачты манипуляторной установки в направлении забоя и приведением ее к вертикали при помощи гидроцилиндров.
Захват и установка столбика в рабочее положение осуществляются специально предусмотренными для этого механизмами. Опускание каретки копра с гидромолотом вниз по мере забивания столбика осуществляется автоматически, только за счет действия гравитационных сил (собственного веса). Выше по тексту отмечалось, что для обеспечения устойчивости работы большинства из отечественных гидромолотов необходимо принудительное поджатие их к забиваемому столбику с усилием, величина которого, в зависимости от конкретной модели гидромолота, может достигать нескольких сотен килограммов. По этой причине использование в копрах манипуляторов с такой кинематикой гидромолотов отечественной разработки, практически, невозможно.
В конструкции известного копрового манипулятора нет выносных аутригеров, поэтому при выдвижении мачты с копром в направлении забоя происходит односторонняя "осадка" кузова с креном его в ту же сторону и соответствующим "закручиванием" рамы шасси автомобильного тягача вокруг ее продольной оси симметрии. После возврата мачты в исходную позицию просевшая сторона кузова вновь занимает прежнее положение.
В связи с этим для обеспечения необходимой силовой защиты указанной рамы от данного вида нагружения требуются соответствующее увеличение ее жесткости, либо использование специальных компенсационных устройств.
В принципе, кинематика копра известного манипулятора обеспечивает и возможность извлечения, при необходимости, столбиков из грунта при помощи перемещающейся вверх в этом случае его каретки.
Одним из основных недостатков данного копрового манипулятора является его узкая специализация. В частности, он не может быть использован в межсезонье, в интервалах между "сваебойными" работами, например, в качестве обычного подъемно-транспортного средства, поскольку входящая в его состав манипуляторная установка не приспособлена для выполнения погрузочно-разгрузочных операций.
Конструктивное исполнение этой известной машины и реализуемый при помощи нее способ забивания столбиков достаточно сложны со всеми вытекающими из этого последствиями.
Сложность указанной машины, а также технологии проведения при помощи нее соответствующих работ обусловлены в основном спецификой конструктивного исполнения и кинематики манипуляторной установки и копра, а также особенностями позиционирования его на участке проведения работ, установки столбиков в рабочее положение, забивания их и др.
Существенным недостатком указанной машины является то, что реализуемые при работе гидромолота копра ударные нагрузки действуют напрямую на металлоконструкцию манипуляторной установки, исполнительные механизмы и управляющую аппаратуру гидросистемы, а также транспортное средство, приводя их к преждевременному износу с соответствующим сокращением срока службы.
Не обеспечивается также и соответствующая силовая разгрузка металлоконструкции манипуляторной установки с автомобильным тягачом известной машины и при извлечении столбиков из грунта.
Задачей настоящего изобретения является устранение вышеперечисленных недостатков прототипа, а именно, упрощение конструкции и улучшение технико-эксплуатационных качеств заявляемого копрового крана-манипулятора, а также оптимизация технологии (способа) производства с его использованием работ по забиванию и извлечению из грунта металлических столбиков барьерных ограждений автомобильных дорог.
В соответствии с изобретением она достигается конкретной совокупностью существенных признаков заявляемого способа и устройства для его осуществления.
К совокупности существенных признаков, характеризующих заявляемое изобретение, относятся:
По способу:
- признак, касающийся доставки размещенной на автомобильном тягаче манипуля-торной установки с мобильным копром, выполненным на основе смонтированного на подвижной каретке гидромолота и приводного гидроцилиндра ее перемещения, а также столбиков своим ходом на участок проведения работ;
- признак, касающийся размещения автомобильного тягача, после прибытия к месту проведения работ, на дороге, вблизи ее обочины, параллельно размеченной под забивку столбиков трассе;
- признак, касающийся перевода копра из транспортного положения в рабочее;
- признак, касающийся позиционирования копра относительно забоя;
- признак, касающийся установки столбика в рабочее положение с обеспечением поджатия его к грунту;
- признак, касающийся включения гидромолота копра, который забивает столбик в грунт на необходимую глубину;
- признак, касающийся выключения гидромолота по окончании забивания столбика, поднятия его после этого в крайнее верхнее положение и перемещения копра на очередную позицию;
- признак, касающийся способности извлечения копром столбиков из грунта;
- признак, касающийся необходимости включения перед началом работ насоса гидросистемы манипуляторной установки и экспериментальной проверки фактической величины усилия поджатия гидромолота гидроцилиндром перемещения каретки к столбику из условия обеспечения в процессе его забивания устойчивого положения копра с последующей корректировкой, в случае надобности, настройки входящего в состав последнего редукционного клапана, обеспечивающего соответствующее давление в штоковой полости гидроцилиндра, эквивалентное указанному усилию;
- признаки, касающиеся особенностей позиционирования копра в окружном направлении и относительно гравитационной вертикали;
- признак, касающийся особенностей установки столбика в рабочее положение;
- признак, касающийся одновременности включения гидромолота копра и гидроцилиндра перемещения его каретки при выполнении операции забивания столбика;
- признак, касающийся уменьшения в конце забивания столбика частоты нанесения по нему ударов гидромолотом, вплоть до единичных, с визуальным контролем при этом глубины погружения столбика в грунт по закрепленному на мачте копра указателю и выключением гидромолота в момент достижения ее заданной величины;
- признак, касающийся особенностей забивания партии столбиков с одного установа автомобильного тягача в пределах досягаемости стрелы установки крано-манипуляторного типа;
- признак, касающийся особенностей извлечения столбиков из грунта;
- признак, касающийся особенностей перевода манипуляторной установки в транспортное положение и переезда на новый участок работ.
По копровому манипулятору:
- наличие в его составе автомобильного тягача;
- размещение на автомобильном тягаче манипуляторной установки;
- наличие в его составе мобильного копра, выполненного на основе смонтированного на подвижной каретке гидромолота;
- использование для перемещения каретки копра приводного гидроцилиндра;
- наличие в его составе гидросистемы с насосом, маслобаком, гидрораспределителями и соответствующими коммуникационными магистралями;
- выполнение манипуляторной установки в виде крана-манипулятора с многозвенной шарнирно-рычажной стрелой;
- формирование между кабиной и кузовом автомобильного тягача, посредством необходимого смещения кузова в направлении хвостовой части шасси, соответствующей рабочей площадки для размещения манипуляторной установки в виде расположенного в образовавшемся в результате этого щелевом зазоре и жестко закрепленного на хребтовых лонжеронах шасси съемного короткобазового надрамника с площадкой обслуживания, боковыми лестницами и локальными компенсаторами жесткости;
- выполнение копра переносным, с возможностью подвешивания его на конце стрелы манипуляторной установки посредством съемной гибкой подвески;
- снабжение манипуляторной установки выносными аутригерами;
- использование в качестве гидропривода копра гидросистемы манипуляторной установки с подсоединением обеих магистралей питания гидроцилиндра перемещения каретки и напорной магистрали гидромолота к ней через быстродействующие отжимные клапаны и прокладкой увеличенной по диаметру проходного сечения сливной магистрали последнего по металлоконструкции стрелы, с формированием необходимых слабин, закреплением по месту и подсоединением ее напрямую к маслобаку с возможностью беспрепятственных манипуляций стрелы с подвешенным на ней копром в пределах ее максимального вылета как в процессе работы, так и при переводе его из транспортного положения в рабочее и обратно без отстыковки указанных магистралей;
- жесткое закрепление болтами на дне кузова автомобильного тягача на равном удалении от его боковых бортов плоской рамы прямоугольной в плане конфигурации, сформированной из двух, разнесенных между собой и замкнутых по своим концам приварными поперечными балками, продольных направляющих [-образного сечения, обращенных друг к другу открытыми концами своих полок, внутри которых размещена с возможностью перемещения в продольном направлении тележка-кантователь копра;
- выполнение тележки-кантователя копра в виде двухосной платформы с четырьмя ходовыми колесами и боковыми роликами из антифрикционного износостойкого материала и приваренными к ней сверху двумя, расположенными напротив друг друга и разнесенными между собой в поперечном направлении, опорами с вертикально ориентированными сквозными соосными пазами U-образной конфигурации со срезанными под углом заходными кромками в их боковых стенках, спрофилированными по наружному диаметру вводимого в них при кантовании копра цилиндрического стержня, связывающего размещенные под прямым углом друг к другу лапы его опорно-установочной платформы, и перекрываемыми на входе запорными головками подпружиненных ригелей, жестко закрепленных на металлоконструкции указанных опор быстродействующих двухпозиционных фиксаторов, снабженными обращенными кверху наклонными скосами, причем подпружиненные ригели указанных фиксаторов тележки-кантователя копра размещены во внутренних полостях своих корпусов с возможностью поворота вокруг оси на 90o и возвратно-поступательного перемещения вдоль нее в пределах ширины U-образных пазов расположенных на тележке-кантователе опор, для чего в концевике консольной части корпуса каждого из фиксаторов выполнена центрально расположенная открытая с краю сквозная прорезь V-образного профиля с формированием на концах образованных при этом в теле концевика клиновидных выступов ориентированных в противоположных направлениях плоских опорно-установочных полуплощадок, оканчивающихся плавно сопряженными с ними по радиусу боковыми ограничительными буртиками, равноудаленными от вертикальной плоскости симметрии на половину диаметра взаимодействующих с ними при соответствующем повороте ригеля концов запрессованного в среднюю часть его хвостовика, параллельно наклонному скосу запорной головки, цилиндрического штифта, консольно выступающих за обводы указанного хвостовика, а на концевой части последнего жестко закреплена посредством штифта ручка рычажного типа;
- кинематическое взаимодействие рычажной ручки каждого из фиксаторов опор тележки-кантователя при извлечении копра из U-образных пазов опор с закрепленным при помощи цилиндрического шарнира на одной из боковых стенок с возможностью поворота в вертикальной плоскости, параллельной оси фиксатора, двухконсольным коромыслом, вылет рабочих плеч которого перекрывает зоны расположения рычажной ручки фиксатора и U-образных пазов в опорах тележки-кантователя;
- взаимодействие тележки-кантователя в крайних положениях своими отбойными элементами с закрепленными на внутренних стенках поперечных балок плоской рамы съемными буферами, каждый из которых выполнен в виде соответствующего набора регулировочных прокладок и выпуклого амортизатора из упругодеформируемого материала;
- жесткое закрепление болтами с возможностью регулировки углового положения в вертикальной плоскости, в стороне от средней части одной из продольных направляющих плоской рамы напротив поворотной стойки манипуляторной установки, двухпозиционного поворотного ложемента для укладки и фиксации сложенной стрелы указанной установки в транспортном положении без копра, выполненного в виде плоского основания с соответствующими присоединительными элементами и приваренной к нему поперечно ориентированной наклонной стенкой, снабженной двумя парами проушин, в которых при помощи оси шарнирно закреплена откидная стойка, состоящая из скрепленных между собой в одно целое посредством приварной поперечины двух, разнесенных между собой боковых щек с отогнутыми наружу заходными кромками и параллельно расположенных вблизи них с внутренней стороны ребер с приваренными в средней части между ними опорными перемычками, образующими в совокупности с близлежащими стенками указанных щек и ребер две приемные ложи с клиновидной заходной частью, спрофилированные по внешнему контуру вводимых в них и фиксируемых при помощи шкворней плоских установочных элементов стрелы, в которых сформированы соответствующие продольно ориентированные стыковочные пазы, располагаемые при укладке ее на ложемент соосно с выполненными в стенках боковых щек и ребер откидной стойки по диаметру шкворней сквозными отверстиями, вблизи которых на внешней поверхности щек приварены Г-образные упоры для фиксации шкворней байонетным способом, а в зоне расположения проушин наклонной стенки в нее ввернуты регулировочные болты, взаимодействующие с обращенными к ним соответствующими упорами откидной стойки;
- монтаж насоса гидросистемы манипуляторной установки, с фиксацией посредством болтового соединения, в посадочном отверстии закрепленного на надрамнике напротив выходного вала коробки отбора мощности двигателя автомобильного тягача кронштейна с сочленнением его приводного вала при помощи соответствующих фланцевых соединений и карданного удлинителя связан с выходным валом указанной коробки;
- размещение маслобака гидросистемы манипуляторной установки на площадке обслуживания надрамника, в ее центральной части, через амортизационную проставку из антивибрационного материала, с закреплением на ней при помощи двух, разнесенных между собой и охватывающих его оболочку по наружному контуру стяжных хомутов;
- выполнение компоновки копрового манипулятора в транспортном положении с подсоединенным к концу стрелы манипуляторной установки копром посредством горизонтальной укладки копра опорно-установочной платформой в опоры тележки-кантователя в направлении к кабине автомобильного тягача, с запиранием платформы в них при помощи быстродействующих двухпозиционных фиксаторов, и боковой опорой арочного типа на пол кузова с последующим трансформированием стрелы, без отстыковки гидравлических коммуникационных магистралей копра, в одну линию с понижением к заднему борту кузова и укладкой выносной секцией на спрофилированный по ее наружному обводу и жестко закрепленный на консольно приваренной к мачте копра стойке ложемент, выполненный в виде U-образной опоры с отогнутыми наружу заходными кромками боковых стенок и размещенной на ее ложе плоской опорной проставкой из износостойкого антифрикционного материала;
- укладка в транспортном положении без копра сложенной стрелы манипуляторной установки с автосцепкой между собой ее выносной и подъемной секций, узлом шарнирного сочленения на закрепленный в кузове автомобильного тягача двухпозиционный поворотный ложемент с фиксацией стрелы в нем при помощи шкворней.
Совпадающими в прототипе и заявляемом изобретении являются по способу - первые восемь, по копровому манипулятору - первые пять из существенных признаков, приведенных в данном перечне, а остальные - отличительными.
При этом практически все из указанных отличительных признаков относятся к существенным, поскольку каждый из них соответствующим образом (в той или иной мере) влияет на достигаемый при осуществлении заявляемого изобретения технический результат, т.е. находится с ним в причинно-следственной связи.
Характер указанного влияния, применительно к каждому из отличительных признаков, детально рассмотрен ниже по тексту при пояснении сущности заявляемого изобретения.
Сущность изобретения поясняется чертежами, где изображены:
на фиг.1 - общий вид копрового манипулятора в транспортном положении;
на фиг.2 - вид А сверху на копровый манипулятор в транспортном положении (ложемент 220 условно не показан);
на фиг. 3 - вид Б спереди на копровый манипулятор в транспортном положении;
на фиг. 4 - общий вид входящего в состав манипулятора мобильного переносного копра;
на фиг.5 - вид В сбоку на копер (ложемент 257 для укладки стрелы 8 манипуляторной установки условно не показан);
на фиг.6 - общий вид надрамника с площадкой обслуживания;
на фиг.7 - вид Г сверху на надрамник с площадкой обслуживания;
на фиг.8 - вид Д слева на надрамник с площадкой обслуживания;
на фиг.9 - горизонтальный разрез Е-Е площадки обслуживания в зоне расположения одной из боковых лестниц;
на фиг.10 - общий вид надрамника (без площадки обслуживания);
на фиг.11 - вид Ж сверху на надрамник (без площадки обслуживания);
на фиг. 12 - поперечное сечение И-И надрамника (без площадки обслуживания);
на фиг. 13 - поперечное сечение К-К надрамника (без площадки обслуживания);
на фиг. 14 - фрагмент общего вида копрового манипулятора с изображением зоны расположения насоса гидросистемы манипуляторной установки;
на фиг. 15 - выносной элемент Л с изображением узла соединения насоса гидросистемы манипуляторной установки с выходным валом коробки отбора мощности двигателя автомобильного тягача копрового манипулятора;
на фиг.16 - вид М справа на консольный кронштейн балочного типа с закрепленным в его посадочном отверстии насосом гидросистемы манипуляторной установки;
на фиг.17 - выносной элемент Н с изображением маслобака гидросистемы манипуляторной установки;
на фиг. 18 - вид П сверху на маслобак гидросистемы манипуляторной установки;
на фиг. 19 - выносной элемент Р с изображением узла крепления маслобака гидросистемы манипуляторной установки на площадке обслуживания надрамника;
на фиг.20 - вид С сверху на опорно-установочную платформу копра (мачта и подкосы условно не показаны);
на фиг.21 - вертикальное сечение Т-Т опорно-установочной платформы копра по месту расположения ее основания;
на фиг.22 - выносной элемент У с изображением фрагмента одной из лап опорно-установочной платформы копра;
на фиг.23 - выносной элемент Ф с изображением узла шарнирного сопряжения мачты копра с его опорно-установочной платформой и фрагмента нижней части трособлочной системы;
на фиг.24 - сечение Х-Х по месту расположения закрепленных на штоке гидроцилиндра двойного действия Х-образной крестовины трособлочной системы копра и плоского опорно-поддерживающего ползуна;
на фиг.25 - вид Ц снизу на ложемент 257 копра для укладки стрелы 8 манипуляторной установки;
на фиг.26 - вид Ш сверху на узел крепления одного из подкосов на металлоконструкции мачты копра через разъемный шарнирный подшипник;
на фиг.27 - поперечное сечение Щ-Щ узла крепления нижней части одного из подкосов на металлоконструкции опорно-установочной платформы копра;
на фиг.28 - вид Э сбоку на узел, изображенный на фиг.27;
на фиг.29 - выносной элемент Ю с изображением хобота каретки копра с размещенным внутри него наголовником;
на фиг.30 - выносной элемент Я с изображением узла крепления верхней части гидромолота на каретке копра;
на фиг.31 - поперечное сечение A1-A1 нижней части каретки копра;
на фиг. 32 - вид Б1 сбоку на хобот каретки копра с размещенным внутри него наголовником;
на фиг. 33 - выносной элемент B1 с изображением верхней части мачты копра;
на фиг. 34 - вид Г1 сбоку на узел крепления корпуса гидроцилиндра двойного действия на металлоконструкции мачты копра;
на фиг. 35 - вертикальный разрез Д1-Д1 металлоконструкции нижней части копра, совмещенный с изображением держателя забиваемого столбика;
на фиг. 36 - поперечный разрез Е1-Е1 нижней части мачты копра, совмещенный с изображением держателя забиваемого столбика;
на фиг.37 - общий вид верхней части копра с монтажом его гидросистемы;
на фиг.38 - вид Ж1 спереди на каретку с гидромолотом и подсоединенными к нему коммуникационными магистралями гидросистемы копра;
на фиг. 39 - поперечное сечение И1-И1 копра по одному из мест крепления коммуникационных магистралей его гидросистемы на металлоконструкции мачты;
на фиг.40 - вид K1 сверху на двуногую боковую опору арочного типа копра;
на фиг.41 - общий вид устанавливаемого на каретке копра гидромолота;
на фиг. 42 - продольное сечение Л1-Л1 одного из хвостовиков коммуникационных магистралей гидросистемы копра, оканчивающегося быстроразъемным отжимным клапаном;
на фиг. 43 - вертикальное сечение M1-M1 нижней части каретки копра по месту установки двухпозиционного съемного захвата для извлечения столбиков из грунта (позиция 1);
на фиг. 44 - общий вид хобота каретки копра с изображением съемного шкворня съемного захвата для извлечения столбиков из грунта (позиция 2);
на фиг.45 - вид H1 сбоку на изображение, приведенное на фиг.44;
на фиг.46 - общий вид расположенных на дне кузова автомобильного тягача копрового манипулятора плоской рамы с размещенной внутри ее направляющих тележкой-кантователем копра и двухпозиционного поворотного ложемента для укладки и фиксации сложенной стрелы манипуляторной установки в транспортном положении без копра;
на фиг. 47 - поперечный разрез П1-П1 плоской рамы, изображенный на фиг. 46;
на фиг.48 - вид P1 сбоку на плоскую раму в зоне расположения на ней одного из буферов, предназначенных для торможения тележки-кантователя при кантовании копра;
на фиг.49 - вид C1 спереди на тележку-кантователь;
на фиг.50 - вид T1 сверху на тележку-кантователь;
на фиг.51 - поперечный разрез У1-У1 тележки-кантователя в зоне расположения боковых роликов ее ходовой части;
на фиг.52 - вертикальный разрез Ф1-Ф1 одного из ходовых колес тележки-кантователя;
на фиг.53 - общий вид одной из опор тележки-кантователя (U-образные пазы в боковых стенках опоры перекрыты подпружиненным ригелем двухпозиционного фиксатора);
на фиг.54 - вид X1 сверху на опору, изображенную на фиг.53;
на фиг.55 - вид Ц1 слева на опору, изображенную на фиг.53;
на фиг.56 - поперечное сечение Ш1-Ш1 средней части хвостовика подпружиненного ригеля двухпозиционного фиксатора опоры, изображенной на фиг.53, по месту расположения в ней цилиндрического штифта;
на фиг. 57 - общий вид двухконсольного коромысла опоры тележки-кантователя;
на фиг.58 - общий вид одной из опор тележки-кантователя (подпружиненный ригель двухпозиционного фиксатора отжат в крайнее левое положение введенным в U-образные пазы в боковых стенках опоры цилиндрическим стержнем опорно-установочной платформы копра);
на фиг. 59 - вид Щ1 слева на опору тележки-кантователя, приведенную на фиг.58 (двухконсольное коромысло условно не показано);
на фиг. 60 - общий вид одной из опор тележки-кантователя (ручка двухпозиционного фиксатора и запорная головка его подпружиненного ригеля повернуты на 90o по отношению к изображению, приведенному на фиг.53, запорная головка ригеля утоплена во внутреннюю полость корпуса фиксатора, U-образные пазы в боковых стенках опоры освобождены для выхода из них цилиндрического стержня опорно-установочной платформы копра);
на фиг.61 - вид Э1 слева на изображение, приведенное на фиг.60;
на фиг.62 - вид Ю1 сверху на изображение, приведенное на фиг.60;
на фиг. 63 - вид Я1 сверху на концевик консольной части корпуса двухпозиционного фиксатора опоры тележки-кантователя (тело ригеля с закрепленной на ней ручкой условно не показано);
на фиг. 64 - вид А2 спереди на двухпозиционный поворотный ложемент для укладки и фиксации сложенной стрелы манипуляторной установки в транспортном положении без копра;
на фиг.65 - общий вид основания поворотного ложемента;
на фиг.66 - вид Б2 сверху на основание поворотного ложемента;
на фиг.67 - вид В2 справа на основание поворотного ложемента;
на фиг.68 - общий вид откидной стойки поворотного ложемента;
на фиг.69 - вид Г2 справа на откидную стойку поворотного ложемента;
на фиг.70 - поперечный разрез Д2-Д2 откидной стойки поворотного ложемента с зафиксированной в ней стрелой манипуляторной установки;
на фиг. 71 - схема гидравлическая принципиальная копрового манипулятора (ДР1. ..ДР8 - дроссели; К1...К6 - клапаны отсечные, К7...К10 - клапаны отжимные манипуляторной установки; К11...К13 - клапаны отжимные копра; К01...К08 - клапаны обратные; КП1...КП8 - клапаны предохранительные; Н - насос; Р9 - кран трехходовой; Ц1, Ц2 - гидроцилиндры механизма поворота стойки манипуляторной установки; Ц3 - гидроцилиндр подъема стрелы; Ц4 - гидроцилиндр выноса стрелы; Ц5 - гидроцилиндр телескопирования стрелы; Ц6, Ц7 - гидроцилиндры аутригеров; Ц8 - гидроцилиндр привода каретки копра; ГМ - гидромолот; КР - клапан редукционный; Б - маслобак; Ф1, Ф2 - фильтры; А1 - блок гидроцилиндров Ц1, Ц2; А2 - гидроблок стрелы; A3 - гидроблок аутригеров; А4, А5 - ограничители расхода; А6 - копер; Р1...Р6 - гидрораспределители, входящие в состав гидроблока А2; Р7, Р8 - гидрораспределители, входящие в состав гидроблока A3);
на фиг. 72 - продольный разрез Е2-Е2; одного из узлов стыковки коммуникационных магистралей копра и гидросистемы манипуляторной установки при помощи быстродействующих отжимных клапанов;
на фиг.73 - общий вид копра при хранении его в горизонтальном положении;
на фиг.74 - общий вид копрового манипулятора в рабочем положении;
на фиг. 75 - вид Ж2 сверху на копровый манипулятор при выполнении работ по обустройству участка дороги с одного установа автомобильного тягача;
на фиг.76 - один из фрагментов схемы кантования (укладки в транспортное положение) копра в кузове автомобильного тягача манипулятора;
на фиг. 77 - выносной элемент И2 с изображением узла крепления копра на конце стрелы манипуляторной установки при помощи гибкой подвески;
на фиг.78 - один из фрагментов схемы кантования (укладки в транспортное положение) копра в кузове автомобильного тягача манипулятора;
на фиг. 79 - типовые профили забиваемых столбиков (а - Σ-образный, б - [-образный, в - коробчатый, г - трубчатый);
на фиг. 80 - общий вид манипулятора в транспортном положении без копра (рама 162 с тележкой-кантователем условно не показаны);
на фиг. 81 - вид К2 сверху на манипулятор в транспортном положении без копра (рама 162 с тележкой-кантователем условно не показаны).
Заявляется способ забивания и извлечения из грунта 1 металлических столбиков 2 преимущественно при возведении и ремонте барьерных ограждений автомобильных дорог и копровый манипулятор для его осуществления.
При этом копровый манипулятор содержит автомобильный тягач 3, размещенную на нем между его кабиной 4 и кузовом 5 гидравлическую манипуляторную установку 6, выполненную в виде крана-манипулятора с выносными аутригерами 7 и многозвенной шарнирно-рычажной поворотной стрелой 8 изменяемого вылета, мобильный переносной копер 9, включающий в себя опорно-установочную платформу 10, сопряженную с ней через центрально расположенный шарнир 11, и два, пространственно разнесенных между собой и размещенных во взаимно перпендикулярных плоскостях подкоса 12, 13 регулируемой длины, например, винтовых талрепа, с исключением относительного проворота вокруг продольной оси, вертикальную мачту 14 с перемещаемым вдоль нее по направляющим 15, 16 на каретке 17, кинематически связанной при помощи трособлочной системы 18 со штоком 19 закрепленного на мачте, со стороны, противоположной каретке, приводного гидроцилиндра 20 двойного действия, гидромолотом 21 и гидросистемой 22 с соответствующими коммуникационными магистралями 23-26 для задействования гидроцилиндра и гидромолота.
В качестве ударного забивочного инструмента 21 в составе копра 9 использован отечественный покупной гидромолот, например, мод. НМ-150 по пат. RU 6579, Е 21 С 3/20, за 1997 год ОАО "Тверьтехоснастка".
Конструктивное исполнение рабочего органа ударного действия в виде быстросъемного функционально законченного мобильного переносного копрового модуля навесного типа на основе смонтированного на подвижной каретке гидромолота и приводного гидроцилиндра ее перемещения позволяет полностью отказаться от имеющейся в составе прототипа узкоспециализированной манипуляторной установки и заменить ее более совершенной, выполненной по крано-манипуляторной схеме с выносными аутригерами.
В результате существенно расширяются возможности пространственного манипулирования подвешенным на конце стрелы копром в процессе его позиционирования на участке проведения работ, особенно в стесненной обстановке, и повышается универсальность машины в целом, поскольку в этом случае автомобильный тягач с размещенной на нем манипуляторной установкой такого типа оперативно, без особых затруднений, могут быть использованы в межсезонье, между сваебойными работами, по их прямому назначению, а именно - для выполнения погрузочно-разгрузочных, транспортировочных и других работ.
Наличие в составе манипуляторной установки выносных аутригеров позволяет существенно повысить устойчивость машины от опрокидывания с обеспечением необходимой силовой защиты шасси 27 автомобильного тягача от действия соответствующих эксплуатационных нагрузок, вызывающих закручивание его рамы вокруг ее собственной продольной оси.
Для размещения манипуляторной установки 6 между кабиной 4 и кузовом 5 автомобильного тягача 3 сформирована посредством необходимого смещения кузова в направлении хвостовой части шасси 27 соответствующая рабочая площадка, выполненная в виде расположенного в образовавшемся в результате этого щелевом зазоре съемного коротко-базового надрамника 28, жестко закрепленного на хребтовых лонжеронах 29, 30 шасси.
Указанное техническое решение достаточно просто в реализации и позволяет разместить крано-манипуляторную установку между кабиной и кузовом без укорочения последнего и необходимости доработки шасси автомобильного тягача.
Надрамник 28 выполнен в виде сварной платформы, состоящей из двух спрофилированных по конфигурации хребтовых лонжеронов 29, 30 шасси 27 автомобильного тягача 3 и связанных между собой поперечиной 31 продольных балок 32, 33, снабженных соответствующими опорно-присоединительными элементами 34-38 и жестко закрепленной на них сзади, например, посредством сварки поперечно ориентированной площадкой обслуживания 39 рамного типа с приварным настилом 40 из стального рифленого листа, и двумя боковыми лестницами 41 с поручнями 42 для подъема и спуска с нее обслуживающего персонала, ступеньки 43 которых образованы из нескольких, например, двух разнесенных между собой плоских реек 44, 45 с пилообразным профилем рабочей поверхности 46.
Опорно-присоединительные элементы 34-38 служат для базирования и закрепления надрамника 28 с манипуляторной установкой 6 на хребтовых лонжеронах 29, 30 шасси 27 автомобильного тягача 3. При этом две пары опорно-установочных элементов 36 и 38 обеспечивают поперечную фиксацию надрамника на указанных лонжеронах шасси, а опорно-установочных элементов 37 - осевую фиксацию манипуляторной установки на продольных балках надрамника.
Крепление крано-манипуляторной установки через надрамник обеспечивает необходимую жесткость сопряжения и совместимость деформации надрамника и рамы шасси тягача при действии на них эксплуатационных нагрузок. Надрамник позволяет более равномерно распределить нагрузку, обусловленную весом размещаемой на нем манипуляторной установки, по длине хребтовых лонжеронов рамы шасси автомобильного тягача и увеличить ее жесткость в данной зоне.
Наличие у надрамника двух боковых лестниц существенно упрощает доступ рабочего персонала на площадку обслуживания и покидание ее в экстремальной ситуации, а конструктивное исполнение их ступенек обеспечивает надежное сцепление с ними практически любой обуви и снижает степень их загрязняемости, особенно, при неблагоприятных погодных условиях. Прилипающая к обуви грязь при подъеме персонала по ступенькам относительно легко проваливается сквозь щелевые зазоры между образующими их рейками. Размещение лестниц на надрамнике делает ненужной соответствующую доработку шасси автомобильного тягача.
Надрамник 28 снабжен локальными компенсаторами жесткости 47, выполненными в виде сформированных на передних концах его продольных балок 32, 33 плавно понижающихся в сторону кабины 4 автомобильного тягача 3 скосов криволинейной конфигурации.
Указанное техническое решение позволяет несколько сгладить имеющие место в рассматриваемой зоне скачки жесткости, обусловленные соответствующим присоединением надрамника к хребтовым лонжеронам шасси автомобильного тягача.
На связывающей продольные балки 32, 33 надрамника 28 поперечине 31 при помощи болтов 48 закреплен ориентированный книзу и расположенный напротив выходного вала 49 коробки отбора мощности двигателя автомобильного тягача 3 консольный кронштейн 50 балочного типа, в посадочном отверстии 51 которого установлен с фиксацией посредством болтового соединения 52 насос 53 гидросистемы 54 манипуляторной установки 6, приводной вал 55 которого, при помощи соответствующих фланцевых соединений 56, 57 и карданного удлинителя 58, связан с выходным валом коробки отбора мощности.
Такое техническое решение упрощает монтаж и сопряжение гидравлического насоса гидросистемы манипуляторной установки с выходным валом коробки отбора мощности двигателя автомобильного тягача, поскольку в этом случае не требуется доработки рамы шасси последнего, т.к. насос располагается на надрамнике напротив выходного вала указанной коробки рядом с маслобаком 59, что позволяет минимизировать длину соответствующих соединительных гидравлических магистралей установки посредством прокладки их по кратчайшим траекториям.
Маслобак 59 гидросистемы 54 манипуляторной установки 6 размещен на площадке обслуживания 39 надрамника 28, в ее центральной части, через амортизационную проставку 60 из антивибрационного материала, например, резины, и закреплен на ней при помощи двух разнесенных между собой и охватывающих его оболочку по наружному контуру, съемных стяжных хомутов 61, выполненных в виде гибких металлических лент, оканчивающихся резьбовыми наконечниками 62, пропущенными через соответствующие отверстия 63 в металлоконструкции рамы площадки, и натянутых взаимодействующими с присоединительными элементами 64 рамы и указанными наконечниками гайками 65.
Такое расположение маслобака весьма благоприятно с точки зрения его эксплуатации. Он, практически, не забрасывается дорожной грязью во время движения копрового манипулятора и не препятствует обслуживанию манипуляторной установки в рассматриваемой зоне. Доступ к нему не вызывает затруднений, поскольку боковые лестницы надрамника расположены напротив него. Крепление его к надрамнику достаточно просто и надежно и способствует снижению величины действующих на него вибраций, а следовательно, и уменьшению пенообразования находящейся в нем рабочей жидкости и количества переводимых во взвесь осевших на дно частиц грязи.
Опорно-установочная платформа 10 копра 9 выполнена в виде центрально расположенного коробчатого основания 66, снабженного тремя, вынесенными за его обводы и оканчивающимися плоскими пятами 67-69, приварными лапами 70-72 балочного типа с установленными внутри них балансировочными грузами 73, две 70, 71 из которых размещены в плане под прямым углом друг к другу и жестко связаны между собой посредством цилиндрического стержня 74, а третья 72 - симметрична по отношению к ним.
Наличие в составе конструкции опорно-установочной платформы балансировочных грузов обеспечивает необходимую поперечную центровку копра, а цилиндрического стержня - существенно облегчает его кантование при переводе из горизонтального положения в вертикальное и наоборот. Особенности выполнения указанных операций подробно рассмотрены ниже по тексту.
Подкосы (талрепы) 12, 13 копра 9, кинематически соединяющие его мачту 14 с опорно-установочной платформой 10, размещены в плоскостях расположения ее лап 70, 71, связанных между собой цилиндрическим стержнем 74, и присоединены к металлоконструкции мачты и платформы через разъемные шарнирные подшипники 75, 76.
Указанное техническое решение обеспечивает необходимую свободу и легкость перемещения мачты копра в двух взаимно перпендикулярных плоскостях при регулировке ее пространственного положения вручную.
Мачта 14 копра 9 выполнена коробчатой из сваренных между собой соответствующим образом стандартных катаных или гнутых профилей [-образной конфигурации, а направляющие 15, 16 мачты - в виде разнесенных между собой с консольным выступанием за обводы ее короба и приваренных к нему двух продольных пластин, механически обработанных после приварки в окончательный размер.
Такое конструктивное исполнение мачты с направляющими достаточно просто в реализации, поскольку для их изготовления могут быть использованы широко доступные материалы и традиционные для машиностроения технологии.
Каретка 17 копра 9 снабжена двумя парами разнесенных по высоте и закрепленных болтами 77 на ее спинке 78 съемных захватов 79, 80 Г-образной в поперечном сечении конфигурации, формирующих в соответствующих местах прямоугольные пазы 81 между их рабочими поверхностями и спинкой каретки под направляющие 15, 16 мачты 14.
Захваты указанной конструкции просты в изготовлении, а также в монтаже и обеспечивают надежное удержание каретки с гидромолотом на направляющих мачты в горизонтальной плоскости при необходимой свободе перемещения каретки в вертикальной плоскости без заеданий и закусывания.
Трособлочная система 18 копра 9 выполнена в виде закрепленных напротив друг друга при помощи соответствующих цилиндрических осей 82, 83 и подшипников качения 84, 85 на концах мачты 14 с обоих ее боков, в плоскостях, параллельных расположению каретки 17 и гидроцилиндра 20, двух пар блоков 86, 87 и 88, 89 с охватывающими их верхними и нижними канатами 90, 91 и 92, 93, закольцованными друг на друга через тело каретки, и подсоединенную к ориентированному книзу штоку 19 гидроцилиндра посредством ввернутой в него резьбовой вилки 94 Х-образную крестовину 95, образованную из шарнирно сочлененных пальцев 96 с ушами 97, 98 вилки центрального и двух боковых коромысел 99 и 100, 101, при этом в рабочие плечи каждого из канатов встроены индивидуальные винтовые механизмы 102-105 регулировки их натяжения, а на резьбовом хвостовике 106 вилки установлен поджатый ею к торцу штока гидроцилиндра плоский опорно-поддерживающий ползун 107 с отогнутыми под прямым углом направляющими лапками 108, 109, скользящими при перемещении штока по обращенной к ним вертикальной стенке 110 мачты.
Указанные особенности конструктивного исполнения трособлочной системы позволяют реализовать кинематику, обеспечивающую принудительное поджатие гидромолота копра к забиваемому столбику с необходимым усилием при достаточно больших его значениях без существенного увеличения для этого массы копра, поскольку она ограничена грузоподъемностью манипуляторной установки на максимальном вылете стрелы, или использования специальных балластных пригрузов съемного типа.
Формирование трособлочной системы в виде двух разнесенных между собой плоских фрагментов позволяет существенно уменьшить диаметры и соответственно увеличить гибкость (эластичность) входящих в нее канатов.
Предлагаемое конструктивное исполнение механической связи входящих в трособлочную систему канатов с концом штока гидроцилиндра по существу является соответствующей компенсационной развязкой, исключающей воздействие на него поперечных (изгибных) нагрузок при функционировании кинематической схемы копра.
В немалой степени этому способствует также наличие располагаемого в указанном месте плоского опорно-поддерживающего ползуна, выполняющего функцию подвижного люнета.
Наличие в рабочих плечах каждого из канатов трособлочной системы копра индивидуальных винтовых механизмов значительно упрощает проблему регулировки их натяжения.
На нижнем срезе каретки 17 копра 9 сформирован соосно расположенный с гидромолотом 21 хобот 111 с вертикально ориентированными направляющими 112-115 под размещаемые в них, с возможностью возвратно-поступательного перемещения сменные наголовники 116, верхняя поверхность 117 которых взаимодействует при работе гидромолота с плоским торцом 118 его ударной части 119, а на нижней поверхности 120 образовано углубление 121 для захвата верхнего конца забиваемого столбика 2 соответствующего профиля, выполненное по его наружному контуру.
На нижнем конце мачты 14 копра 9 жестко закреплен соосно расположенный с наголовником 116 консольный держатель 122, снабженный открытыми со стороны установки забиваемых столбиков 2 сменными направляющими скобами 123 вилочного типа, зев каждой из которых спрофилирован по наружному контуру столбика соответствующей конфигурации.
Использование в составе копра сменных наголовников и направляющих скоб для удержания забиваемых столбиков позволяет значительно расширить соответствующие возможности копрового манипулятора в зависимости от их геометрических параметров (см. фиг.79).
На мачте 14 копра 9 над верхним срезом подкосов 12, 13, в пределах визуальной видимости с уровня грунта, установлен двухкоординатный индикатор 124 отклонения мачты от вертикали, что существенно упрощает контроль за пространственным положением ее в процессе позиционирования копра.
Мачта 14 копра 9 снабжена указателем 125 высоты подъема (опускания) гидромолота 21, например, выполненным в виде закрепленной на ней измерительной линейки. Наличие такого указателя значительно облегчает определение момента выключения копра при погружении забиваемого столбика в грунт на необходимую глубину.
На верхнем конце мачты 14 копра 9 под соответствующими блоками 86, 87 трособлочной системы 18, со стороны размещения каретки 17, приварена двуногая боковая опора 126 арочного типа, равновеликая по высоте, относительно продольной оси мачты, радиальному вылету лап 70, 71 опорно-установочной платформы 10, связанных между собой цилиндрическим стержнем 74.
Указанная опора в совокупности с опорными пятами 67, 68 лап 70, 71 опорно-установочной платформы 10 обеспечивает необходимую устойчивость копра в горизонтальном положении при его хранении и транспортировке.
На цилиндрической оси 82 крепления верхних блоков 86, 87 трособлочной системы 18 копра 9, между соответствующими ушами 127, 128 мачты 14 установлена поворотная серьга 129 с шарнирно подсоединенной к ней при помощи фиксируемого в осевом направлении цилиндрического пальца 130 съемной гибкой подвеской 131, закрепляемой на конце стрелы 8 используемой для переноса копра манипуляторной установки 6 шкворнем 132, снабженным запорным замком, например, пружинного типа.
Гибкая подвеска 131 может быть выполнена в виде канатных или цепных звеньев, либо состоящей из двух шарнирно сочлененных рычагов карданной тяги, снабженных
соответствующими присоединительными элементами. Конструктивно канатная гибкая подвеска может быть одноветвевой, оканчивающейся соответствующими присоединителями к стреле 8 и серьге 129 (см. фиг.77), либо двухветвевой (см. фиг. 74, 76, 78). В последнем случае палец 130 не требуется, поскольку канат подвески продевается непосредственно сквозь ушко серьги. Реализованный в конструкции заявляемого копрового манипулятора способ подвески копра на конце стрелы манипуляторной установки полностью исключает возможность несанкционированного расцепления копра с ней при выполнении сваебойных работ и кантовании. Помимо этого, благодаря наличию гибкой подвески стрела манипуляторной установки, практически, не принимает непосредственного участия в сваебойных работах. Она в данном случае выполняет только страховочную функцию, обеспечивая гарантированное удержание копра при возможном несанкционированном отклонении его от гравитационной вертикали. При этом реализуемые в процессе работы гидромолота копра ударные нагрузки и вибрации, практически, не передаются на стрелу манипуляторной установки и шасси автомобильного тягача.
Каретка 17 копра 9 снабжена переставляемым двухпозиционным съемным захватом 133 для извлечения столбиков 2 из грунта 1, выполненным в виде самоустанавливающейся по линии действия тянущей силы центральной тяги 134 с резьбовым хвостовиком 135, закрепляемым на нижнем срезе каретки на минимально возможном по конструктивным соображениям плече от направляющих мачты при помощи пакета сферических шайб 136 и стопорных гаек 137, с подвешенной на ней траверсой 138, на которой размещены, с возможностью дискретной регулировки пространственного положения, фиксируемые болтами 139 накладные проушины 140 с шарнирно присоединенными к ним посредством цилиндрических пальцев 141 двумя охватывающими столбик с боковых сторон серьгами 142, 143 с пропущенным через них и соответствующие отверстия 144 в стенках столбика поперечно ориентированным съемным шкворнем 145, снабженным замковым механизмом блокировки 146, например, пружинного типа, от несанкционированного выпадения его из указанных отверстий, связанным с траверсой гибким подвесом 147, например, цепочкой.
В составе гидросистемы 22 копра 9 предусмотрен закрепленный на металлоконструкции мачты 14 регулируемый редукционный клапан 148 для настройки реализуемого гидроцилиндром 20 усилия поджатая гидромолота 21 к забиваемому столбику 2, а коммуникационные магистрали 23-26 от гидроцилиндра и гидромолота гидросистемы проложены вдоль мачты в направлении к ее верхнему концу с фиксацией посредством поджимаемых болтами 149 прихватов 150 и формированием необходимых петель провисания 151, 152 и пучка 153 выступающих за его срез гибких хвостовиков соответствующей длины, оканчивающихся быстроразъемными отжимными клапанами 154 для подсоединения их к гидросистеме 54 манипуляторной установки 6.
В каждой из коммуникационных магистралей 23-26 гидросистемы 22 копра 9 предусмотрены соответствующие присоединители 155-158 для подстыковки к ним измерительных средств контроля давления, например, при регулировке параметров ее работы или испытаниях, герметизированные съемными заглушками.
Наличие в гидросистеме 22 редукционного клапана 148 и присоединителя 156 значительно облегчает проблему оперативного подбора необходимой величины усилия поджатая гидромолота к забиваемому в грунт столбику. Закрепленные на металлоконструкции мачты коммуникационные магистрали копра не портят его внешний вид, без особых затруднений подстыковываются к гидросистеме манипуляторной установки и отстыковываются, при необходимости, от нее всего за несколько минут и обеспечивают необходимую свободу перемещения по направляющим мачты каретки с гидромолотом и пространственных манипуляций с копром в целом при выполнении работ.
На дне кузова 5 автомобильного тягача 3 на равном удалении от его боковых бортов 159, 160 жестко закреплена болтами 161 плоская рама 162 прямоугольной в плане конфигурации, выполненная из двух, разнесенных между собой и замкнутых по своим концам приварными поперечными балками 163, 164 продольных направляющих 165, 166 [-образного сечения, обращенных друг к другу открытыми концами своих полок 167, 168, внутри которых размещена с возможностью перемещения в продольном направлении тележка-кантователь 169 копра 9, взаимодействующая в крайних положениях своими отбойными элементами 170 с закрепленными при помощи болтов 171, на внутренних стенках поперечных балок рамы съемными буферами 172-175, каждый из которых выполнен в виде соответствующего набора регулировочных прокладок 176 и выпуклого амортизатора 177 из упругодеформируемого материала, например, резины.
Буферы 172-175 предназначены для останова тележки-кантователя 169 в крайних положениях при кантовании копра и амортизации реализуемых при этом соударений с ними ее отбойных элементов 170. При этом одновременность касания передней либо задней пар отбойных элементов с соответствующими парами буферов обеспечивается конструктивно посредством подбора необходимых регулировочных прокладок 176.
Тележка-кантователь 169 копра 9 выполнена в виде двухосной платформы 178 с четырьмя ходовыми колесами 179-182 и боковыми роликами 183-186 из антифрикционного материала, например, полиамида, взаимодействующими с соответствующими поверхностями 187, 188 продольных направляющих 165, 166 плоской рамы 162, и приваренными к ней сверху двумя, расположенными напротив друг друга и разнесенными между собой в поперечном направлении опорами 189, 190 с вертикально ориентированными сквозными соосными пазами 191 U-образной конфигурации со срезанными под углом заходными кромками 192, 193 в их боковых стенках 194, 195, спрофилированными по наружному диаметру вводимого в них при кантовании копра 9 цилиндрического стержня 74, связывающего размещенные под прямым углом друг к другу лапы 70, 71 его опорно-установочной платформы 10, и перекрываемыми на входе запорными головками 196 подпружиненных ригелей 197 жестко закрепленных на металлоконструкции указанных опор быстродействующих двухпозиционных фиксаторов 198, снабженными обращенными кверху наклонными скосами 199.
Наличие в конструкции ходовой части тележки-кантователя 169 боковых роликов 183-186 и подбор соответствующего расстояния между продольными направляющими 165, 166 рамы 162 обеспечивают беспрепятственное перемещение ее по ним без заеданий и визуально фиксируемого поперечного люфта (рысканья).
Подпружиненные ригели 197 быстродействующих двухпозиционных фиксаторов 198 тележки-кантователя 169 копра 9 размещены во внутренних полостях своих корпусов 200 с возможностью поворота вокруг продольной оси на 90o и возвратно-поступательного перемещения вдоль нее в пределах ширины U-образных пазов 191 расположенных на тележке-кантователе опор 189, 190, для чего в концевике 201 консольной части корпуса каждого из фиксаторов выполнена центрально расположенная открытая с краю сквозная прорезь 202 V-образного профиля с формированием на концах образованных при этом в теле концевика клиновидных выступов 203, 204 ориентированных в противоположных направлениях плоских опорно-установочных полуплощадок 205, 206, оканчивающихся плавно сопряженными с ними (по радиусу) боковыми ограничительными буртиками 207, 208, равноудаленными от вертикальной плоскости симметрии 209 на половину диаметра взаимодействующих с ними при соответствующем повороте ригеля 197 концов 210, 211 запрессованного в среднюю часть его хвостовика 212, параллельно наклонному скосу 199 запорной головки 196, цилиндрического штифта 213, консольно выступающих за обводы указанного хвостовика.
На концевой части хвостовика 212 ригеля 197 каждого из быстродействующих двухпозиционных фиксаторов 198 жестко закреплена, например, посредством штифта 214, ручка 215 рычажного типа, кинематически взаимодействующая при извлечении копра 9 из опор 189, 190 тележки-кантователя 169 с закрепленным при помощи цилиндрического шарнира 216 на одной из их боковых стенок 195 с возможностью поворота в вертикальной плоскости, параллельной продольной оси фиксатора, двухконсольным коромыслом 217, вылет рабочих плеч которого в плане перекрывает зоны расположения рычажной ручки фиксатора и U-образных пазов 191 в опорах тележки-кантователя.
Наличие буртиков 207, 208 позволяет исключить при прямом повороте вручную ручек 215 фиксаторов 198 возможность случайного соскальзывания концов 210, 211 штифтов 213 с полуплощадок 205, 206, достаточно малой протяженности, а наличие коромысел 217 обеспечивает автоматическое сталкивание указанных концов с полуплощадок и соответствующий поворот ручек в обратном направлении при извлечении копра 9 из опор тележки-кантователя.
Данное техническое решение обеспечивает быстрое, буквально в течение нескольких минут, и безопасное кантование копра при переводе заявленного манипулятора из транспортного положения в рабочее и наоборот с использованием манипуляторной установки, а также соответствующее размещение его и фиксацию в кузове автомобильного тягача.
На дне кузова 5 автомобильного тягача 3 в стороне от средней части одной из продольных направляющих 166 плоской рамы 162 напротив поворотной стойки 218 манипуляторной установки 6 жестко закреплен болтами 219 с возможностью регулировки углового положения в вертикальной плоскости двухпозиционный поворотный ложемент 220 для укладки и фиксации сложенной стрелы 8 в транспортном положении без копра 9. Ложемент 220 выполнен в виде плоского основания 221 с соответствующими присоединительными элементами и приваренной к нему поперечно ориентированной наклонной стенкой 222, снабженной двумя парами проушин 223, 224 и 225, 226, в которых при помощи оси 227 шарнирно закреплена откидная стойка 228.
Откидная стойка 228 ложемента 220 состоит из скрепленных между собой в одно целое посредством приварной поперечины 229 двух, разнесенных между собой боковых щек 230, 231 с отогнутыми наружу заходными кромками 232, 233 и параллельно расположенных вблизи них с внутренней стороны ребер 234, 235 с приваренными в средней части между ними опорными перемычками 236, 237, образующими в совокупности с близлежащими стенками указанных щек и ребер две приемные ложи 238, 239 с клиновидной заходной частью. Ложи 238, 239 спрофилированы по внешнему контуру вводимых в них и фиксируемых при помощи шкворней 240, 241 плоских установочных элементов 242, 243 стрелы 8, в которых сформированы соответствующие продольно ориентированные стыковочные пазы 244, располагаемые при укладке ее на ложемент 220 соосно с выполненными в стенках боковых щек 230, 231 и ребер 234, 235 откидной стойки 228 по диаметру шкворней 240, 241 сквозными отверстиями 245, вблизи которых на внешней поверхности щек приварены Г-образные упоры 246 для фиксации шкворней байонетным способом.
В зоне расположения проушин 223, 224 и 225, 226 наклонной стенки 222 в нее ввернуты регулировочные болты 247, взаимодействующие с обращенными к ним соответствующими упорами 248 откидной стойки 228.
Указанные болты позволяют регулировать угловое положение откидной стойки 228 ложемента 220 в вертикальной плоскости. Благодаря этому совмещение угла наклона опорных перемычек 236, 237 откидной стойки и установочных поверхностей элементов 242, 243 стрелы 8 манипуляторной установки 6 при укладке ее в кузов 5 автомобильного тягача 3 без копра 9 не вызывает каких-либо затруднений. Укладка стрелы на ложемент производится быстро и с достаточно надежной фиксацией.
В свободном положении откидную стойку 228 ложемента 220 поворачивают вокруг его оси 227 и опускают на дно кузова 5 автомобильного тягача 3.
Данное техническое решение обеспечивает быструю укладку и надежную фиксацию сложенной стрелы манипуляторной установки в кузове автомобильного тягача без подвешиваемого на ней копра и такой же перевод ее в рабочее положение при использовании тягача с указанной установкой в перерывах между сваебойными работами, по своему прямому назначению.
В качестве гидропривода копра 9 в заявляемом копровом манипуляторе использована гидросистема 54 манипуляторной установки 6 с входящими в состав одного из ее гидроблоков А2 (см. фиг.71, поз. 249) штатными гадрораспределителями Р3, Р6 дистанционного управления работой его гидроцилиндра 20 и гидромолота 21 с поста 250 оператора. При этом обе коммуникационные магистрали 23, 24 гидроцилиндра 20 и напорная магистраль 25 гидромолота 21 копра 9 присоединены к соответствующим штатным магистралям 251-253 гидросистемы 54 манипуляторной установки б через быстродействующие отжимные клапаны 154 и 254, а сливная магистраль 26 гидромолота выполнена увеличенной по диаметру проходного сечения, проложена по металлоконструкции стрелы 8 с закреплением по месту и формированием необходимых слабин, обеспечивающих беспрепятственные пространственные манипуляции стрелы с подвешенным на ней копром в пределах ее максимального вылета в процессе работы и при переводе его из транспортного положения в рабочее и обратно без отстыковки указанных коммуникационных магистралей от гидросистемы манипуляторной установки, и напрямую, минуя гидрораспределитель Р6, подсоединена к маслобаку 59 последней. Указанное увеличение диаметра проходного сечения сливной магистрали гидромолота в совокупности с подсоединением ее к маслобаку напрямую позволяет минимизировать гидравлическое сопротивление данной магистрали в целях избежания снижения эффективности работы гидромолота.
Использование в качестве гидропривода копра гидросистемы манипуляторной установки со штатными гидрораспределителями дистанционного управления работой его гидромолота и приводного гидроцилиндра с поста оператора в совокупности с особенностями схемно-конструктивного сопряжения ее с магистралями питания последних весьма удобно для пользователя, поскольку позволяет отказаться в данном случае от создания дополнительного самостоятельного контура их питания, что повлекло бы за собой соответствующее усложнение и удорожание машины.
Отсутствие необходимости в отстыковке магистралей питания гидромолота и приводного гидроцилиндра копра при выполнении операции его кантования, а также сваебойных работ, в значительной мере способствует повышению производительности заявляемого копрового манипулятора и обеспечению необходимого удобства его обслуживания.
Компоновка заявляемого копрового манипулятора с подсоединенным в транспортном положении к концу стрелы 8 манипуляторной установки 6 копром 9 выполнена посредством горизонтальной укладки копра опорно-установочной платформой 10 в опоры 189, 190 тележки-кантователя 169 в направлении к кабине автомобильного тягача 3 с запиранием платформы в них при помощи быстродействующих двухпозиционных фиксаторов 198 и боковой опорой 126 арочного типа на пол кузова 5 с последующим трансформированием стрелы, без отстыковки гидравлических коммуникационных магистралей 23-26 копра, в одну линию с понижением к заднему борту кузова и укладкой выносной секцией 255 на спрофилированный по ее наружному обводу и жестко закрепленный на консольно приваренной к мачте 14 копра стойке 256 ложемент 257, выполненный в виде U-образной опоры с отогнутыми наружу заходными кромками 258, 259 боковых стенок и размещенный на ее ложе плоской опорной проставкой 260 из антифрикционного материала, например, полиамида.
Указанное конструктивно-компоновочное решение обеспечивает рациональную укладку стрелы 8 манипуляторной установки 6 в кузове 5 автомобильного тягача 3 вдоль продольной оси симметрии с опорой на копер 9, оставляя свободными расположенные по его бокам зоны, которые могут быть использованы для размещения забиваемых столбиков. Данная компоновка делает привлекательным внешний вид заявляемого крана-манипулятора.
В транспортном положении без копра 9 сложенная стрела 8 манипуляторной установки 6 с автосцепкой между собой ее выносной и подъемной секций 255, 261 укладывается узлом шарнирного сочленения их на закрепленный в кузове двухпозиционный поворотный ложемент 220 с фиксацией стрелы в нем при помощи шкворней 240, 241.
Указанное техническое решение обеспечивает рациональную укладку и фиксацию сложенной стрелы манипуляторной установки в кузове автомобильного тягача без подвешиваемого на ней копра и располагаемой на дне кузова платформы с тележкой-кантователем, а также максимальное высвобождение донной площадки кузова для размещения перевозимых в перерывах между сваебойными работами грузов.
Забивание столбиков 2 в грунт 1 при помощи заявляемого копрового манипулятора осуществляют следующим образом.
Смонтированную на автомобильном тягаче 3 манипуляторную установку с мобильным копром и столбиками 2 доставляют своим ходом на участок проведения работ и размещают автомобильный тягач на дороге, вблизи ее обочины, параллельно размеченной под забивку столбиков трассе.
При этом перед началом работ включают насос 53 гидросистемы 54 манипуляторной установки 6 и экспериментально осуществляют проверку фактической величины усилия поджатая гидромолота 21 гидроцилиндром 20 привода каретки 17 к столбику 2 из условия обеспечения в процессе его забивания устойчивого положения копра 9 с последующей корректировкой, при необходимости, настройки входящего в состав последнего редукционного клапана 148, обеспечивающего соответствующее давление в штоковой полости 262 гидроцилиндра, эквивалентное указанному усилию.
Для удобства проведения работ указанную операцию можно выполнять в транспортном положении копрового манипулятора при горизонтальной ориентации копра 9 в кузове 5 автомобильного тягача 3.
Перед ее выполнением сначала, предварительно сняв с присоединителя 156 коммуникационной магистрали 24 гидросистемы 22 копра 9 заглушку, подсоединяют к нему соответствующий измеритель давления, например, показывающего типа.
Затем при включенном насосе 53, посредством перемещения рукоятки управления гидрораспределителя Р3 гидросистемы 54 манипуляторной установки 6 подают рабочую жидкость в штоковую полость 262 гидроцилиндра 20 привода каретки 17 копра 9. При этом шток 19 гидроцилиндра 20, втягиваясь под действием давления рабочей жидкости в его корпус 263, перемещает при помощи подсоединенных к коромыслу 99 закрепленной на нем крестовины 95 канатов 92, 93, переброшенных через блоки 88, 89, каретку 17 в крайнее левое положение (в направлении кабины 4 автомобильного тягача 3). В указанной позиции при помощи вышеупомянутого измерителя визуально фиксируют величину показываемого им давления и по ней с учетом известных геометрических размеров поршня 264 и штока 19 гидроцилиндра 20 копра 9 определяют фактическое значение развиваемого им усилия поджатая забиваемого столбика 2 к грунту 1. Если оно соответствует требуемому, то на этом указанная проверка заканчивается. Измеритель давления отстыковывают от присоединителя 156 и последний герметизируют заглушкой.
При отклонении фактической величины определенного таким образом усилия поджатая забиваемого столбика к грунту от необходимого значения указанное расхождение устраняют посредством соответствующей настройки (регулировки) редукционного клапана 148 гидросистемы 22 копра 9.
Необходимость в такой проверке возникает в основном после больших перерывов в работе копра, либо после использования копрового манипулятора по иному назначению с демонтажем указанного рабочего оборудования, например, для производства подъемно-транспортных работ.
При больших значениях усилия поджатия гидромолота копра к забиваемому столбику, близких по абсолютной величине к общему весу копра, он может вести себя в процессе забивки столбиков неустойчиво. Для этого собственно и проводится соответствующая проверка и, при необходимости, корректировка величины указанного усилия до необходимого уровня, обеспечивающего устойчивую работу копра.
В принципе, данная проверка может быть проведена и заранее на месте постоянной дислокации копрового манипулятора.
По окончании проверки копровый манипулятор и копер переводят из транспортного положения в рабочее.
При этом сначала выносят аутригеры 7 манипуляторной установки 6 на необходимое расстояние в поперечном направлении, поворачивают их опорньми пятами вниз и перемещениями рукояток гидрораспределителей Р7, Р8 соответствующего гидроблока A3 (см. фиг.71, поз. 249) ее гидросистемы 54 опускают до упора в дорожное полотно. Затем, используя рукоятки управления гидрораспределителей Р1, Р2, Р4, Р5 гидроблока А2 посредством соответствующих манипуляций стрелой 8 манипуляторной установки 6, приподнимают верхнюю часть копра 9 за сочлененную с серьгой 129 гибкую подвеску 131, и поворачивая его относительно шарнира 265, образованного находящимися в кинематическом зацеплении друг с другом цилиндрическим стержнем 74 опорно-установочной платформы 10 копра 9 и U-образными пазами 191 опор 189, 190 тележки-кантователя 169, переводят копер из горизонтального положения в вертикальное.
При выполнении указанной операции перемещающаяся по направляющим 165, 166 расположенной в кузове 5 автомобильного тягача 3 плоской рамы 162 к его заднему борту тележка-кантователь 169 с шарнирно закрепленным на ней копром 9 останавливается в крайнем правом положении буферами 174, 175, взаимодействующими с соответствующими отбойными элементами 170 ее конструкции.
После кантования копра 9 вручную поворачивают на 90o (из вертикального положения в горизонтальное) ручки 215 фиксаторов 198. При повороте ручек 215 одновременно происходит соответствующий поворот жестко скрепленных с ними ригелей 197 и концов 210, 211 штифтов 213 фиксаторов.
Концы 210, 211 штифтов 213, кинематически взаимодействуя при повороте ручек 215 с боковыми кромками 266 наклонных граней прорезей 202 в концевиках 201 корпусов 200 фиксаторов 198 и преодолевая сопротивление сжимающихся при этом пружин 267, перемещают ригели 197 в крайнее левое положение. При этом головки 196 ригелей утапливаются во внутренние полости корпусов 200 фиксаторов 198, освобождая запертые ими до этого выходы U-образных пазов 191 опор 189, 190 тележки-кантователя 169.
В конце поворота ручек 215 концы 210, 211 штифтов 213 выводятся на опорные полуплощадки 205, 206 и упираются в ограничительные буртики 207, 208 клиновидных выступов 203, 204, сформированных в телах концевиков 201 консольных частей корпусов 200 фиксаторов 198.
После этого подъемом стрелы 8 манипуляторной установки 6 копер 9 извлекают из опор 189, 190 тележки-кантователя 169.
При выполнении указанного движения цилиндрический стержень 74 опорно-установочной платформы 10 копра 9, выходя из U-образных пазов 191 опор 189, 190 тележки-кантователя 169, задевает за расположенные над ним консольные концы 268 коромысел 217 опор и отклоняет их вверх. Коромысла 217, поворачиваясь относительно осей шарниров 216, входят своими отклоняющимися книзу противоположными консольными концами 269 в зацепление с горизонтально расположенными под ними ручками 215 фиксаторов 198 и поворачивают их в обратном направлении. При этом концы 210, 211 штифтов 213, ригели 197 фиксаторов сходят с опорных полуплощадок 205, 206 и, соскальзывая по боковым кромкам 266 наклонных граней прорезей 202 в концевиках 201 корпусов 200 под действием разжимающихся пружин 267, опускаются на дно 270 прорезей 202. Перемещающиеся одновременно с этим расфиксированные ригели 197 фиксаторов 198 поворачиваются на 90o в обратном направлении наклонными скосами 199 запорных головок 196 кверху, которые, выходя из полостей корпусов 200, автоматически перекрывают освободившиеся выходы из U-образных пазов в опорах 189, 190 тележки-кантователя 169.
После извлечения из опор 189, 190 тележки-кантователя 169 подвешенный на конце стрелы 8 манипуляторной установки 6 копер 9 посредством соответствующих манипуляций стрелы переносят в направлении забивания первого столбика 2 и осуществляют его позиционирование относительно забоя.
Позиционирование копра 9 в окружном направлении осуществляют посредством соответствующего поворота его вручную на шарнирно закрепленной на конце стрелы 8 манипуляторной установки 6 гибкой подвеске 131 с последующим опусканием опорно-установочной платформой 10 в указанной позиции на грунт 1. Контроль положения копра при этом осуществляют визуально.
Позиционирование копра 9 относительно гравитационной вертикали осуществляют посредством соответствующих поочередных угловых перемещений в двух взаимно перпендикулярных плоскостях шарнирно закрепленной на опорно-установочной платформе 10 мачты 14 при помощи кинематически связывающих их между собой винтовых талрепов 12, 13. При вращении резьбовых муфт 271 талрепов 12, 13 соответствующим образом изменяется их длина, а следовательно, и угол отклонения мачты 14 от вертикали. Контроль пространственного положения мачты копра при выполнении указанной операции осуществляют визуально по закрепленному на ней двухкоординатному индикатору 124 отклонения ее от гравитационной вертикали.
По окончании позиционирования копра 9 посредством соответствующего перемещения рукоятки управления гидрораспределителя Р3 гидроблока А2 гидросистемы 54 манипуляторной установки 6 подают рабочую жидкость в поршневую полость 272 гидроцилиндра 20 привода каретки 17 с закрепленным на ней гидромолотом 21. При этом, шток 19 гидроцилиндра 20, выдвигаясь из его корпуса 263 под действующим на поршень 264 давлением рабочей жидкости, перемещает при помощи подсоединенных к коромыслам 100, 101 закрепленной на нем крестовины 95 канатов 90, 91, переброшенных через блоки 86, 87, каретку 17 с гидромолотом 21 в крайнее верхнее положение.
Затем устанавливают забиваемый столбик 2 в рабочее положение с обеспечением соответствующего поджатая его к грунту 1.
Установку столбика 2 в рабочее положение осуществляют вручную посредством ввода его верхнего конца в соответствующее углубление 121 наголовника 116 каретки 17 копра 9, а нижнего - в направляющую скобу 123 закрепленного на мачте 14 держателя 122 с опиранием на грунт 1 и поджатием к спинке 273 скобы.
После этого, придерживая в указанной позиции столбик 2 руками, соответствующим опусканием каретки 17 поджимают гидромолот 21 через наголовник 116 к верхнему концу столбика.
Указанную операцию осуществляют посредством подачи рабочей жидкости в штоковую полость 262 гидроцилиндра 20 путем соответствующего перемещения рукоятки управления гидрораспределителя Р3 гидроблока А2 гидросистемы 54 манипуляторной установки 6. При этом, шток 19 гидроцилиндра 20, втягиваясь под действующим на поршень 264 давлением рабочей жидкости в корпус 263, опускает при помощи подсоединенных к коромыслу 99 закрепленной на нем крестовины 95 канатов 92, 93, переброшенных через блоки 88, 89, каретку 17 с гидромолотом 21 вниз.
При опускании каретки 17 плоский торец 118 ударной части 119 гидромолота 21 подводится к верхней поверхности 117 наголовника 116 и поджимает через него с необходимым усилием забиваемый столбик 2 к грунту 1. При этом столбик автоматически занимает в пространстве строго вертикальное положение, фиксируемое наголовником 116 и скобой 123.
Данное техническое решение достаточно просто в реализации и не требует для позиционирования копра и выставки забиваемого столбика в исходном положении соответствующих специальных механизмов со сложной кинематикой, как в прототипе. По существу оно позволяет полностью отказаться от них, перейдя на ручное позиционирование и выставку, и на этой основе значительно упростить конструкцию заявленного крана-манипулятора, улучшить весовое совершенство и снизить его стоимость.
Убедившись в правильности выставки забиваемого столбика к грунту 1, обслуживающий персонал покидает рабочую зону (отводится в безопасное место), а дальнейшее управление работой копра производится дистанционно с рабочего поста 250 оператора манипуляторной установки 6.
После этого включают копер 9, гидромолот 21 которого забивает столбик 2 в грунт 1 на необходимую глубину.
Включение копра 9 осуществляют посредством одновременного задействования его гидромолота 21 и гидроцилиндра 20 привода каретки 17 путем соответствующих перемещений рукояток гидрораспределителей Р6, Р3 гидроблока А2 гидросистемы 54 манипуляторной установки 6.
При перемещении рукоятки управления гидрораспределителя Р6 рабочая жидкость из гидросистемы 54 манипуляторной установки 6 через коммуникационную магистраль 253, отжимные клапаны 254, 154, коммуникационную магистраль 25 и блок управления 274 гидромолота 21 подается под поршень его бойка 275 и последний, перемещаясь вверх, сжимает газ в пневмопружине аккумулятора 276. При этом рабочая жидкость, находящаяся над поршнем бойка 275, вытесняется через сливную коммуникационную магистраль 26 гидросистемы 22 копра 9 напрямую в маслобак 59 гидросистемы 54 манипуляторной установки 6.
В конце взвода поршень бойка 275 открывает соответствующее отверстие в гильзе 277 гидромолота 21, через которое рабочая жидкость из напорной линии подается под торец плунжера 278 блока управления 274. При этом, давление рабочей жидкости во взводящей и переливной камерах гидромолота 21, выравнивается и боек 275 под действием давления газа в пневмопружине начинает ускоренно двигаться вниз.
В конце рабочего хода бойком 275 наносится удар по хвостовику 279 ударной части 119 гидромолота 21, взаимодействующей своим плоским торцом 118 с верхней поверхностью 117 надетого на забиваемый столбик 2 наголовника 116.
При этом поршень бойка 275 открывает соответствующее отверстие в гильзе 277 и под действием сжатого газа плунжер 278 возвращается в начальное положение и далее указанный цикл работы гидромолота 21 многократно повторяется.
Реализуемая в процессе ударов энергия передается от наголовника 116 забиваемому столбику 2 и последний с необходимой скоростью погружается в грунт 1.
При перемещении рукоятки управления гидрораспределителя Р3 рабочая жидкость из гидросистемы 54 манипуляторной установки 6 через отжимные клапаны 254, 154 и коммуникационную магистраль 24 подается в штоковую полость 262 гидроцилиндра 20 копра 9. При этом шток 19 гидроцилиндра 20, втягиваясь под действующим на поршень 264 давлением рабочей жидкости в корпус 263, синхронно опускает при помощи соединенной с ним трособлочной системы 18 каретку 17, обеспечивая постоянное принудительное поджатие с необходимым усилием гидромолота 21 к погружаемому в грунт 1 столбику 2.
Реализуемая посредством одновременного включения гидромолота и приводного гидроцилиндра его перемещения особенность работы копра очень важна при больших величинах указанных усилий, в основном, характерных для гидромолотов отечественного изготовления, когда собственного веса гидромолота для этого не хватает.
Стрела 8 манипуляторной установки 6 в этом процессе не участвует, оставаясь все время неподвижной. Она, в данном случае, выполняет только страховочную функцию, обеспечивая гарантированное удержание копра 9 при возможном несанкционированном его наклоне. При этом реализуемые при работе гидромолота 21 ударные нагрузки на стрелу и шасси 27 автомобильного тягача 3 копрового манипулятора практически не передаются.
В конце забивания столбика 2 в грунт 1 соответствующими перемещениями рукоятки управления гидрораспределителя Р3 уменьшают частоту нанесения ударов по нему гидромолота 21, вплоть до единичных, и визуально контролируя при этом глубину погружения столбика в грунт по закрепленному на мачте 14 копра 9 указателю 125, в момент достижения ее заданной величины дают команду оператору манипуляторной установки на выключение копра.
Данное техническое решение значительно облегчает оператору визуальное определение момента окончания забивания столбика и сводит к минимуму вероятность избыточного заглубления его в грунт.
Выключение копра 9 осуществляют с рабочего поста 250 оператора манипуляторной установки 6 при помощи рукояток управления гидрораспределителей Р3, Р6.
По окончании забивания первого столбика каретка 17 с гидромолотом 21 вышерассмотренным способом отводится в крайнее верхнее положение и копер 9 при помощи стрелы 8 манипуляторной установки 6 переносят на очередную позицию (к месту забивания второго столбика) и весь вышерассмотренный процесс повторяется.
С одного установа автомобильного тягача 3 копрового манипулятора поочередно перенося посредством соответствующих манипуляций стрелы 8 манипуляторной установки 6 копер 9 с позиции на позицию, осуществляют забивание партии столбиков 2 в пределах досягаемости стрелы, после чего, не отстыковывая гидравлических коммуникационных магистралей копра от гидросистемы манипуляторной установки, переводят копровый манипулятор в транспортное положение с укладкой копра в кузов автомобильного тягача и переезжают на новый участок работ.
Перевод копрового манипулятора из рабочего положения в транспортное осуществляют в следующем порядке.
Сначала по направляющим 165, 166 рамы 162 перемещают вручную тележку-кантователь 169 в крайнее правое положение (в направлении заднего борта кузова 5 автомобильного тягача 3). Затем, манипулируя стрелой 8 манипуляторной установки 6, приподнимают и переносят копер 9 в зону расположения тележки-кантователя 169, после чего, сориентировав его цилиндрическим стержнем 74 опорно-установочной платформы 10 напротив U-образных пазов 191 опор 189, 190, ставят на тележку-кантователь. При опускании копра 9 на тележку-кантователь 169 цилиндрический стержень 74 нажимает на концы 268 коромысел 217 опор 189, 190 и они, поворачиваясь относительно осей шарниров 216, отклоняются книзу и пропускают стержень по направлению к наклонным скосам 199 запорных головок 196 ригелей 197 фиксаторов 198.
При встрече с наклонными скосами 199 запорных головок 196 цилиндрический стержень 74 отжимает их, утапливая во внутренние полости корпусов 200 фиксаторов 198, и опускается на дно U-образных пазов 191 в опорах 189, 190 тележки-кантователя 169.
После попадания цилиндрического стержня 74 в указанную зону запорные головки 196 ригелей 197 под действием пружин 267 автоматически возвращаются в исходную позицию и, перекрывая выходы из U-образных пазов 191, фиксируют опорно-установочную платформу 10 копра 9 в опорах 189, 190 тележки-кантователя 169.
После этого посредством соответствующих манипуляций стрелы 8 манипуляторной установки 6 отклоняя верхнюю часть копра 9 книзу в направлении заднего борта кузова 5 автомобильного тягача 3 и поворачивая его относительно шарнира 265, перемещают тележку-кантователь 169 по направляющим 165, 166 рамы 162 в направлении кабины 4 тягача и ставят верхнюю часть копра на пол кузова 5 ножками опоры 126.
Перемещающаяся при укладке копра в кузов автомобильного тягача по направляющим 165, 166 тележка-кантователь 169 тормозится в крайнем положении буферами 172, 173, взаимодействующими с ее передними отбойными элементами 170.
В указанной позиции копер 9 занимает горизонтальное положение и опирается цилиндрическим стержнем 74 на дно U-образных пазов 191 опор 189, 190 тележки-кантователя 169, а ножками опоры 126 на пол кузова 5 автомобильного тягача 3.
После укладки копра 9 в кузов 5 автомобильного тягача 3 стрелу 8 манипуляторной установки 6 без отстыковки гидравлических коммуникационных магистралей 23-26 трансформируют в одну линию с понижением к заднему борту кузова и укладкой выносной секцией 255 на спрофилированный по ее наружному обводу ложемент 257 копра.
Затем, действуя в обратном порядке, возвращают выносные аутригеры 7 манипуляторной установки 6 в исходное положение опорными пятами вверх, после чего копровый манипулятор готов к переезду на новый участок обустраиваемой дороги.
Параметры работы копра во многом определяются характеристиками используемого гидропривода (гидросистемы 54 манипуляторной установки 6) и могут, при необходимости, в определенной степени варьироваться, например, посредством соответствующего изменения частоты вращения насоса 53 и характера перемещения рукояток управления гидрораспределителей Р3, Р6.
Для извлечения столбиков 2 из грунта 1 используют двухпозиционный захват 133 со съемным шкворнем 145. При этом при извлечении столбиков из достаточно плотного грунта, когда реализуются околопредельные нагрузки, используют схему установки захвата 133 на каретке 17 в позиции 1 на минимально возможном вылете от ее спинки 78, где металлоконструкция обладает максимальной несущей способностью (см. фиг.43).
При извлечении столбиков из менее плотных грунтов, когда реализуются номинальные и минимальные нагрузки, может быть использована схема установки шкворня 145 указанного захвата в позиции 2, непосредственно между направляющими 114, 115 сквозных пазов в стенках хобота 111 каретки под приподнятым наголовником 116 (см. фиг.44).
При извлечении из грунта верхний конец столбика 2 сцепляют посредством захвата 133 (в позиции 1, см. фиг.43) либо его шкворня 145 (в позиции 2, см. фиг. 44) с кареткой копра и вытаскивают заглубленную в грунт нижнюю часть столбика из него соответствующим подъемом каретки 17 при помощи гидроцилиндра 20. Выполнению указанной операции благоприятствует ориентация гидроцилиндра 20 штоком 19 книзу, благодаря чему им сможет развиваться максимально возможное тяговое усилие.
Данное техническое решение достаточно просто в реализации. Оно позволяет без особых затруднений производить все работы, связанные с извлечением неправильно забитых, либо поврежденных столбиков, а также с их плановой заменой. При этом реализуемое в процессе указанных работ квазистатические нагрузки весьма большой величины, в отличие от прототипа, практически, не передаются на манипуляторную установку и шасси автомобильного тягача, поскольку они замыкаются в данном случае непосредственно на металлоконструкцию соответствующих частей самого копра.
Конструктивно-компоновочную схему заявляемого копрового манипулятора в транспортном положении без копра реализуют обычно при относительно больших перерывах в работах по обустройству дорог. В этом случае гибкую подвеску 131 отстыковывают от стрелы 8, а коммуникационные магистрали 23-26 копра - от соответствующих магистралей гидросистемы 54 манипуляторной установки и горизонтально укладывают его на месте хранения.
После этого на освободившейся стреле 8 манипуляторной установки может быть подвешен другой рабочий орган, например, крюк 280 или грейфер, позволяющий использовать данную машину для производства иных, например, подъемно-транспортных работ.
Указанная особенность конструктивно-компоновочного построения заявляемого копрового манипулятора позволяет, практически, полностью исключить вынужденные простои входящих в его состав автомобильного тягача и манипуляторной установки в межсезонные периоды, что немаловажно для пользователя данной техники.
В целом заявляемый способ забивания и извлечения из грунта металлических столбиков, преимущественно при возведении и ремонте барьерных ограждений автомобильных дорог и копровый манипулятор для его осуществления достаточно просты в реализации. Благодаря вышерассмотренным особенностям конструктивного исполнения указанного копрового оборудования обеспечивается его необходимая компактность, высокая маневренность, надежность и безопасность в работе и удобство в эксплуатации.
При обустройстве дорог с использованием заявляемых копрового оборудования и технологии указанных работ не перекрывается их проезжая часть.
В процессе производства работ, связанных с забиванием и извлечением из грунта металлических столбиков барьерных ограждений автомобильных дорог, оно легко переводится из транспортного положения в рабочее и обратно.
При этом не требуется отстыковка гидравлических коммуникационных магистралей копра от соответствующих магистралей гидросистемы 54 манипуляторной установки как при выполнении указанных операций, так и непосредственно при забивании и извлечении столбиков из грунта.
Позиционирование копра при выполнении производимых с помощью указанного копрового манипулятора работ предельно просто и не вызывает затруднений.
Заявляемый способ и копровый манипулятор для его осуществления благодаря своей специфике обеспечивает достаточно высокую производительность как при забивании столбиков барьерных ограждений автомобильных дорог, так и при извлечении их из грунта.
При этом реализуемые в процессе выполнения указанных работ ударные и квазистатические нагрузки, практически, не передаются на стреловое оборудование манипуляторной установки и шасси автомобильного тягача.
Работа заявляемого копрового оборудования при забивании столбиков в грунт сопровождается относительно низким уровнем шума, не превышающим допустимого санитарными нормами, а в связи с тем, что обслуживающий персонал в это время может находиться на некотором удалении от места производства работ, вредного воздействия на него практически нет.
Благодаря использованию в конструкциях входящих в состав копрового манипулятора копра и манипуляторной установки высококачественной отечественной гидравлической элементной базы указанное оборудование обладает необходимой экологической чистотой.
Оптимальность и простота использованных в заявляемом способе и конструкции копрового оборудования технических решений, а также применение широкодоступных отечественных материалов, покупных изделий и типовой технологии изготовления позволяют многократно воспроизвести данное оборудование по соответствующей документации в условиях серийного производства на располагающих для этого всем необходимым специализированных машиностроительных заводах и реализовать указанный способ в реальных условиях эксплуатации, преимущественно при возведении и ремонте барьерных ограждений автомобильных дорог.
В соответствии с изобретением ЗАО "ПК Уралтерминалмаш" к настоящему времени на заявляемый способ и копровый манипулятор для его осуществления полностью разработана конструкторская документация, изготовлен и испытан с положительными результатами полномасштабный действующий опытный образец последнего под индексом НКА16.00.000.
Эффективность заложенных в конструкцию заявляемого копрового манипулятора и реализуемого с его использованием способа забивания и извлечения из грунта металлических столбиков барьерных ограждений автомобильных дорог технических решений, а также возможность получения при осуществлении изобретения вышеупомянутого технического результата, заключающегося в упрощении конструкции и улучшении технико-эксплуатационных качеств указанного копрового оборудования и оптимизации технологии (способа) производства с его использованием работ, подтверждены результатами вышеупомянутых испытаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ ПЕРЕНОСНОЙ КОПЕР | 2000 |
|
RU2203359C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| СПОСОБ МОНТАЖА НАВЕСНОГО ОБОРУДОВАНИЯ БУРИЛЬНО-СВАЕБОЙНОЙ МАШИНЫ "БЕРКУТ" | 2001 |
|
RU2196203C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| Способ монтажа крано-манипуляторной установки на шасси грузового автомобиля | 2021 |
|
RU2754370C1 |
| ГИДРОЦИЛИНДР | 2001 |
|
RU2219386C2 |
| Многорельсовая эстакадная дорога на сваях, револьверный агрегат и способ строительства дороги | 2016 |
|
RU2623786C1 |
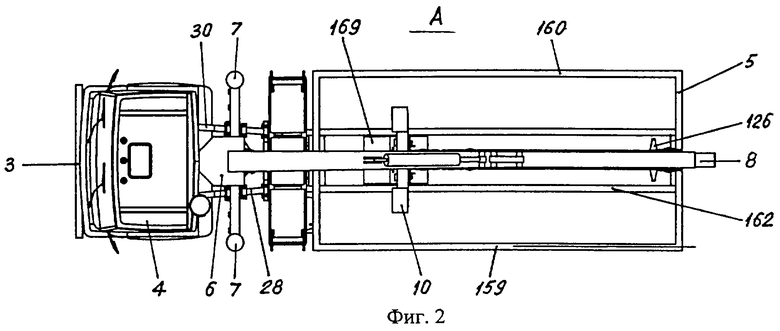
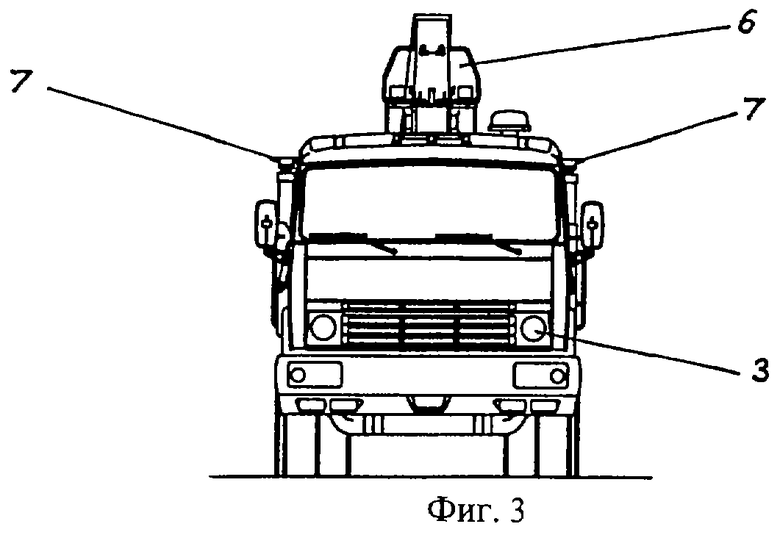
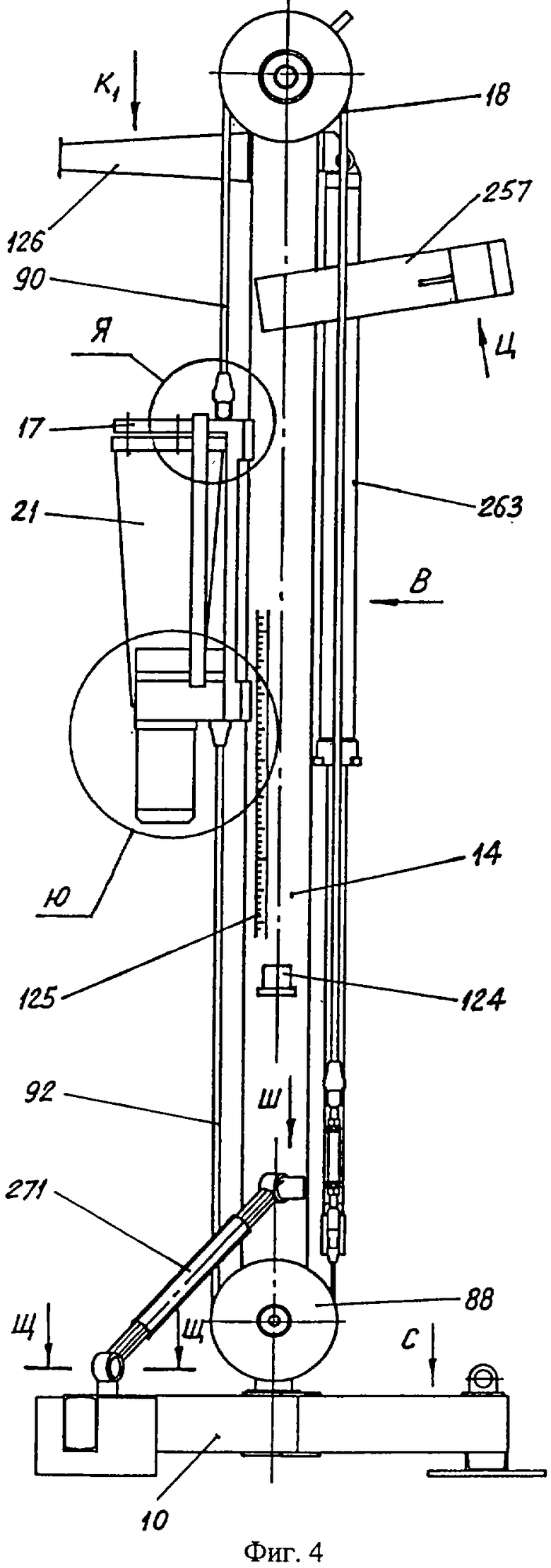
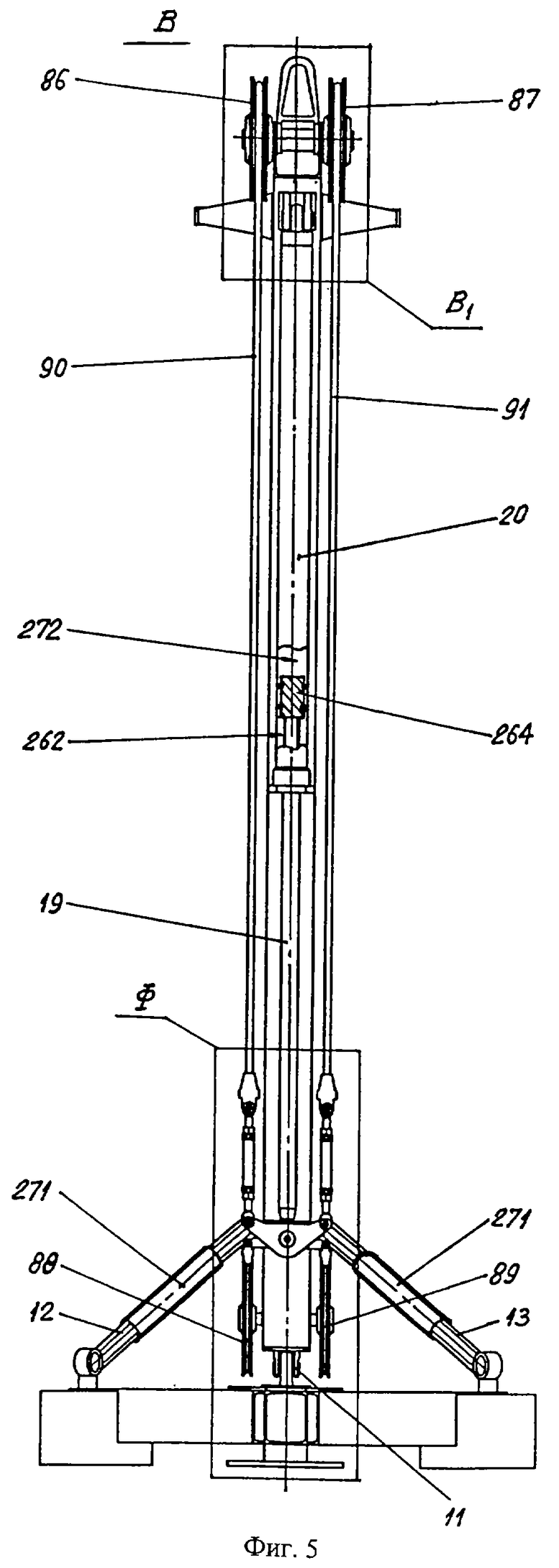
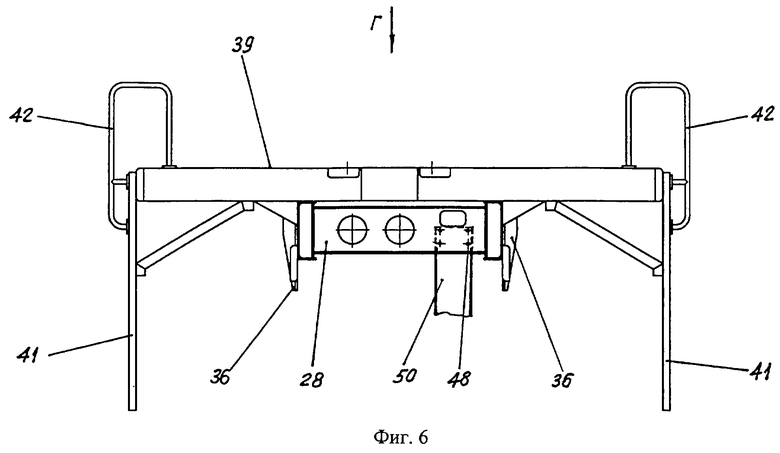
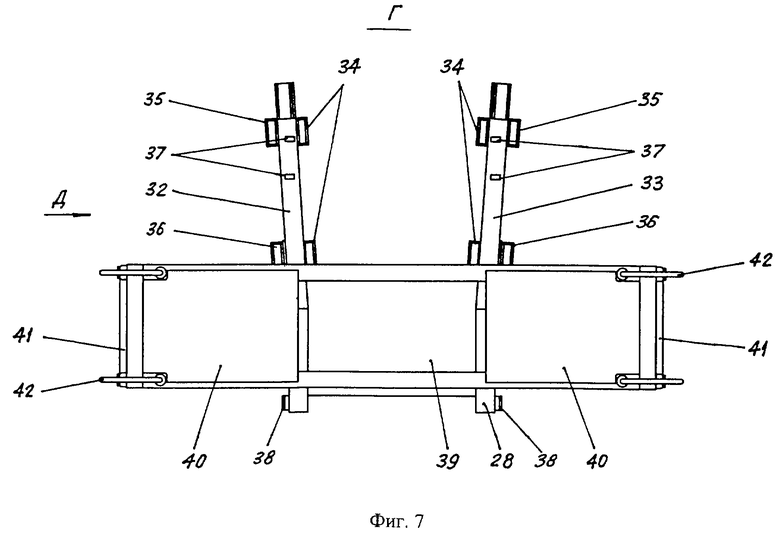
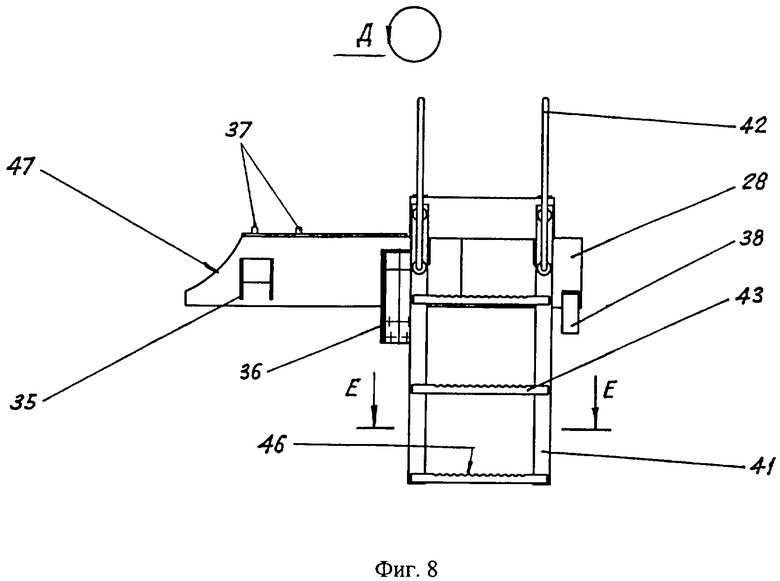

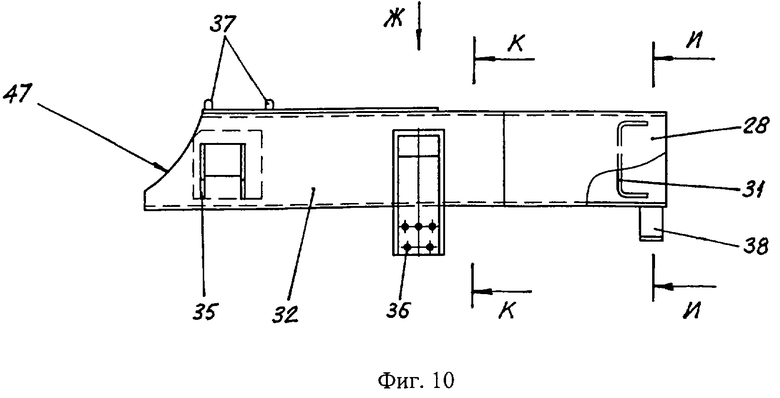
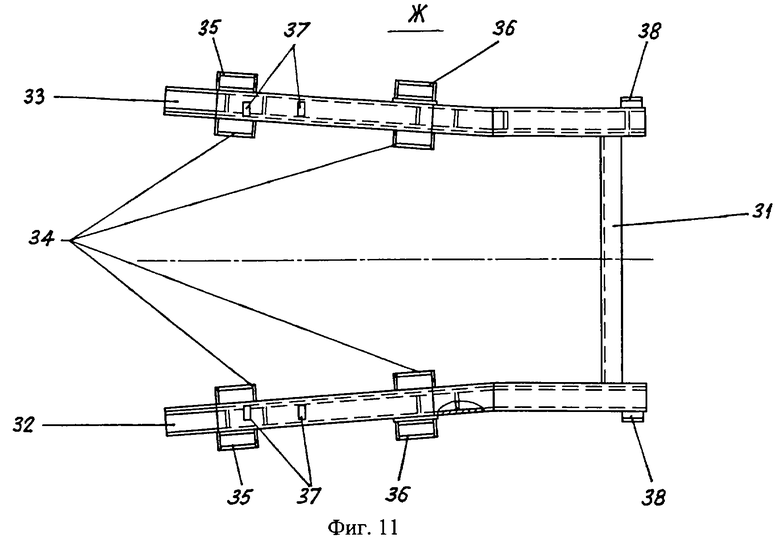
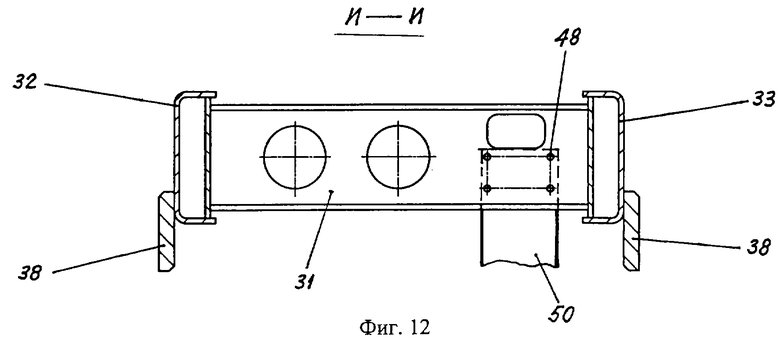

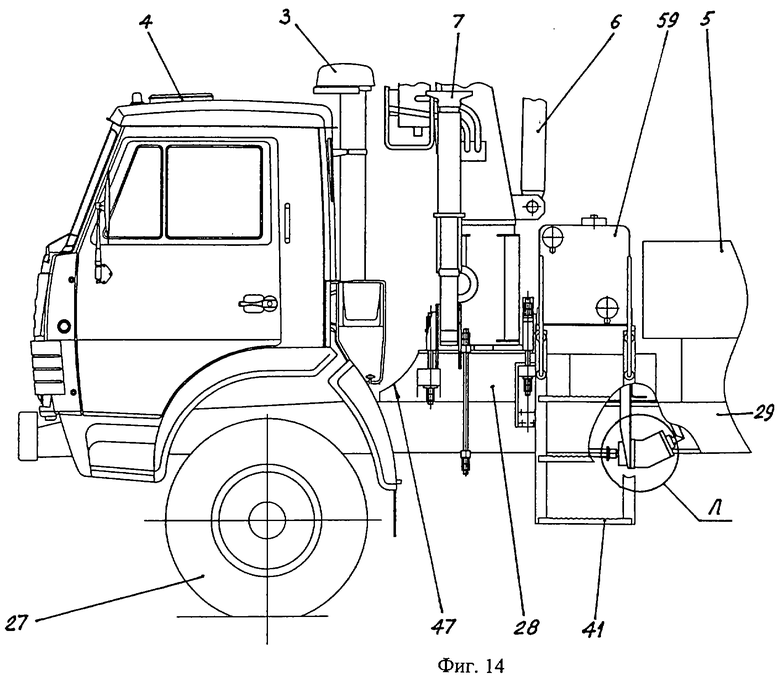
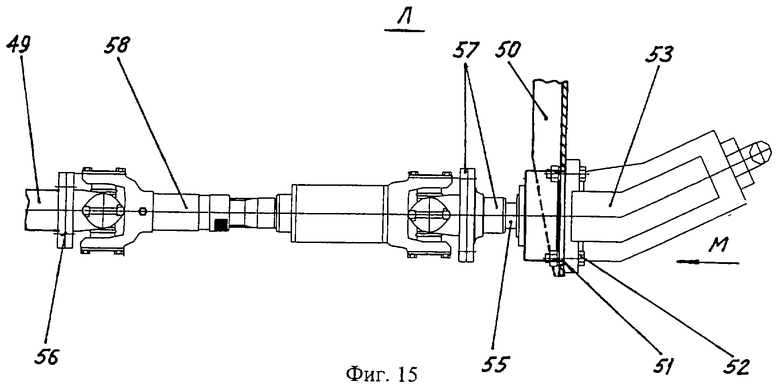
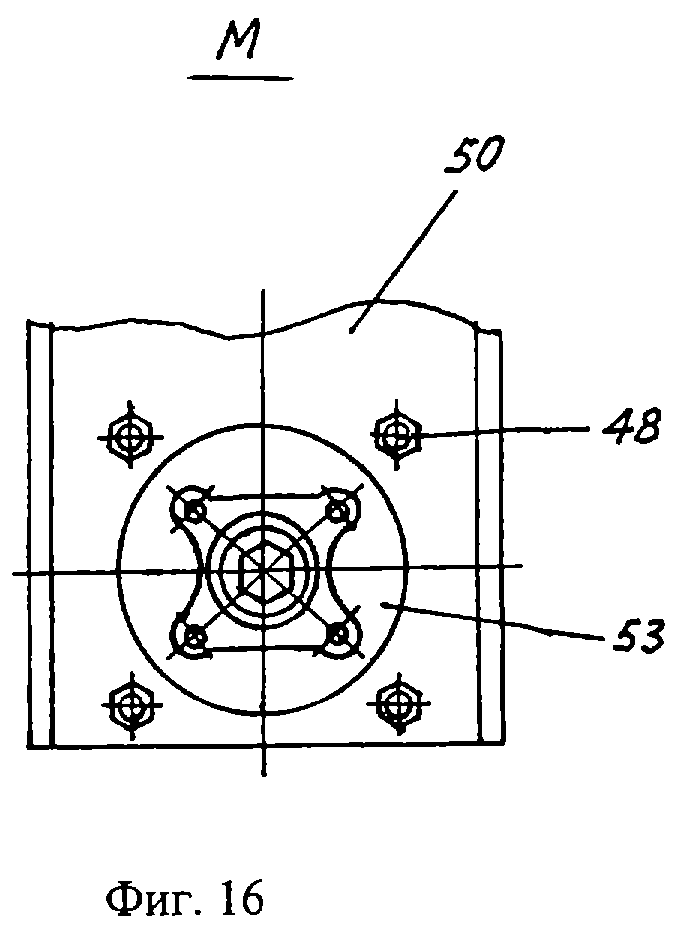
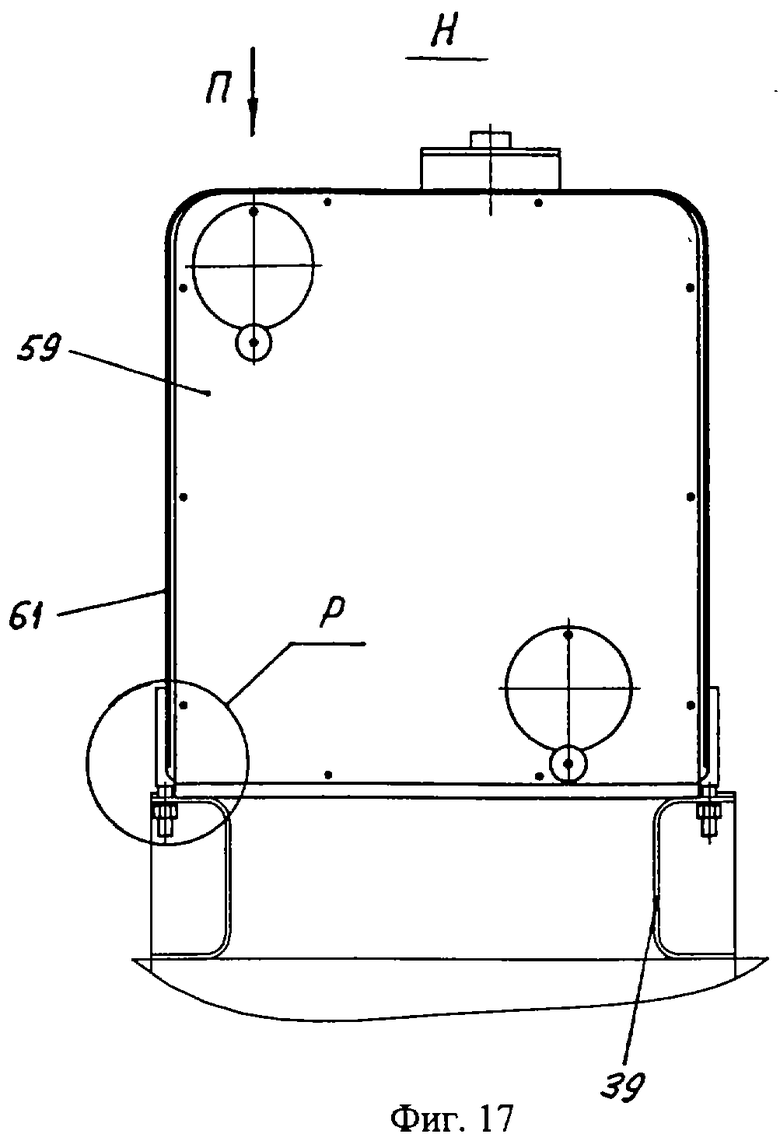
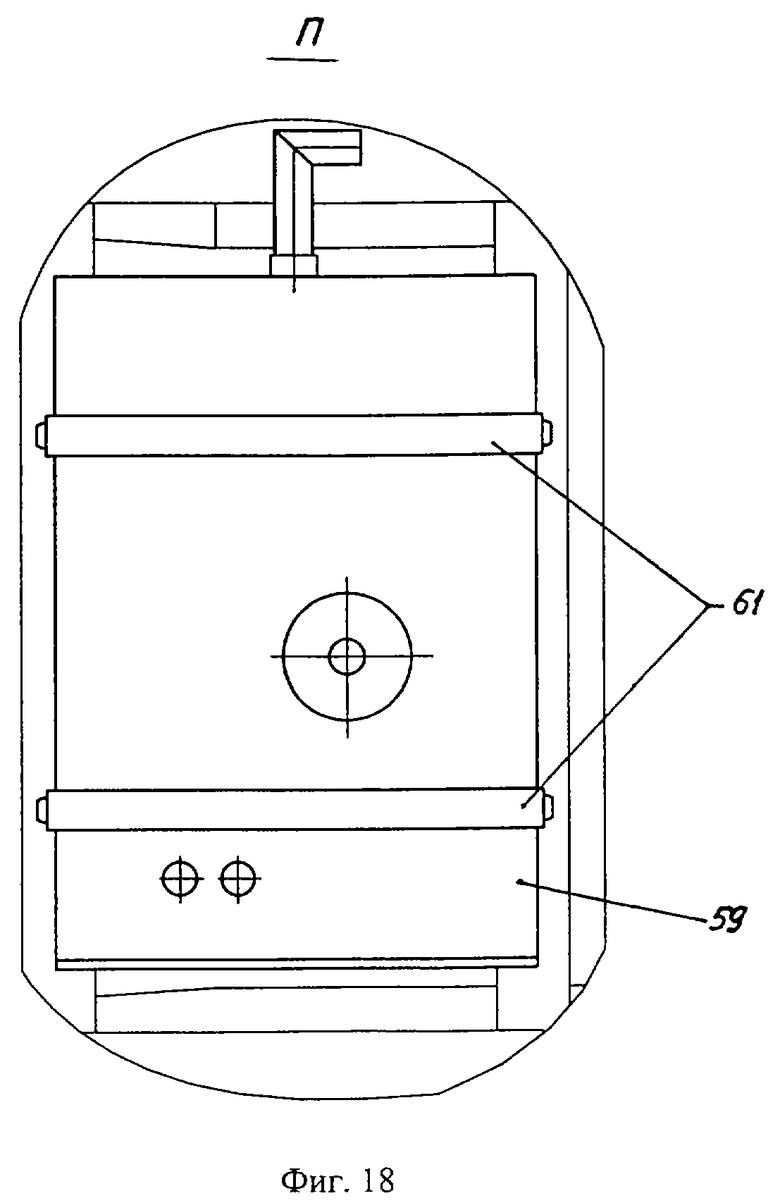
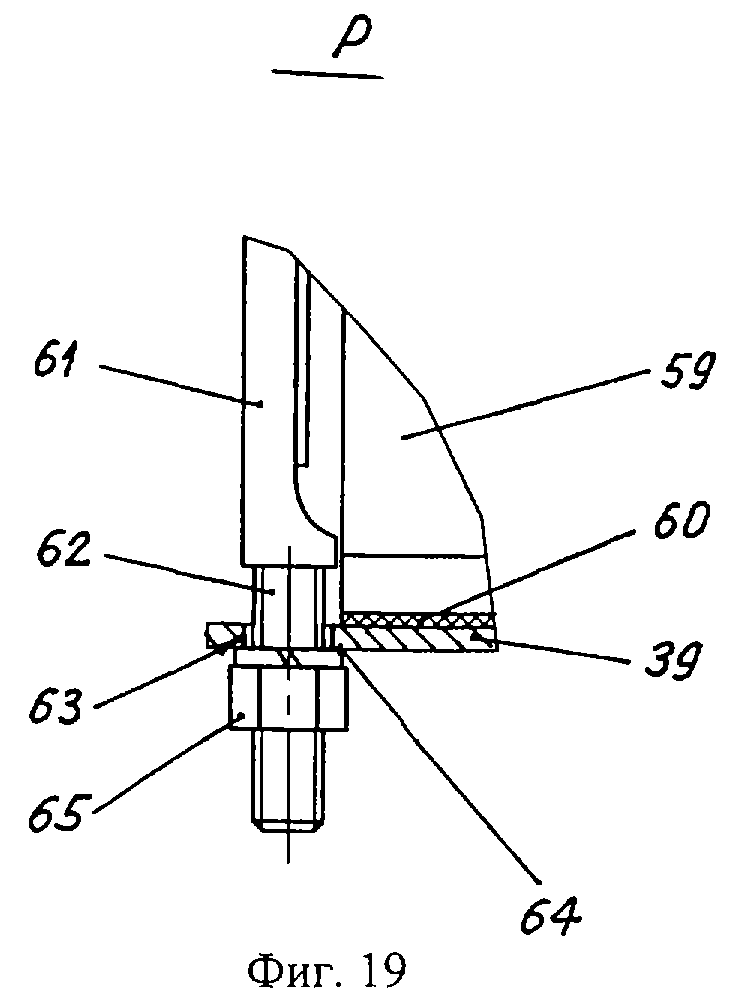

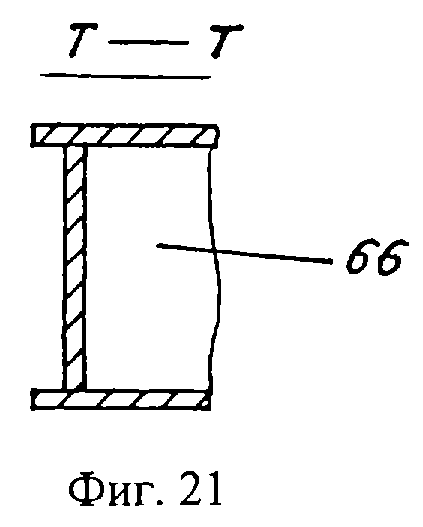
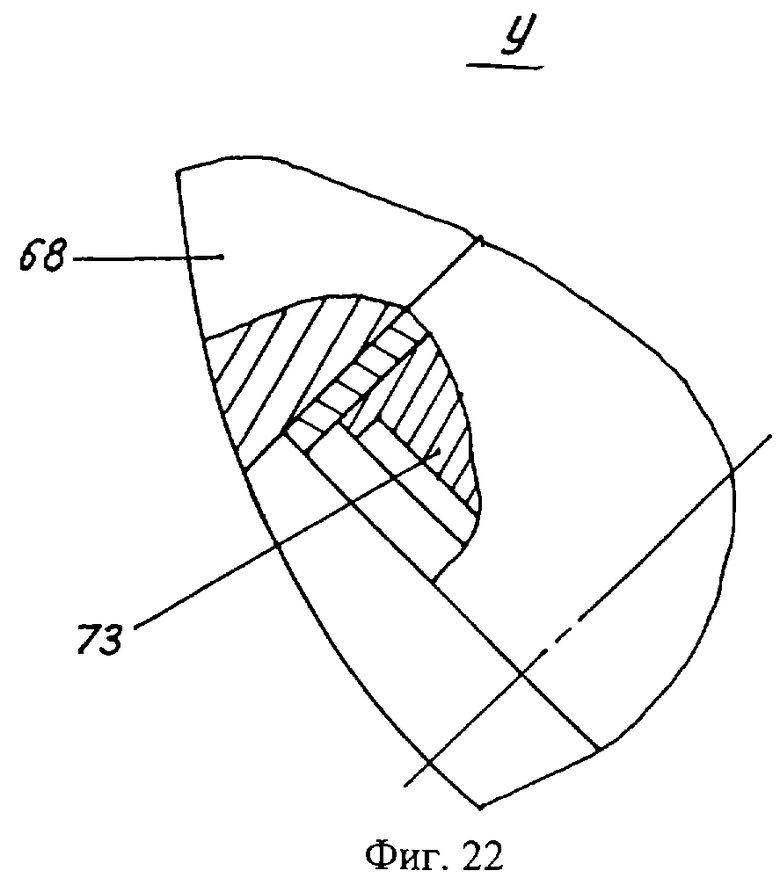
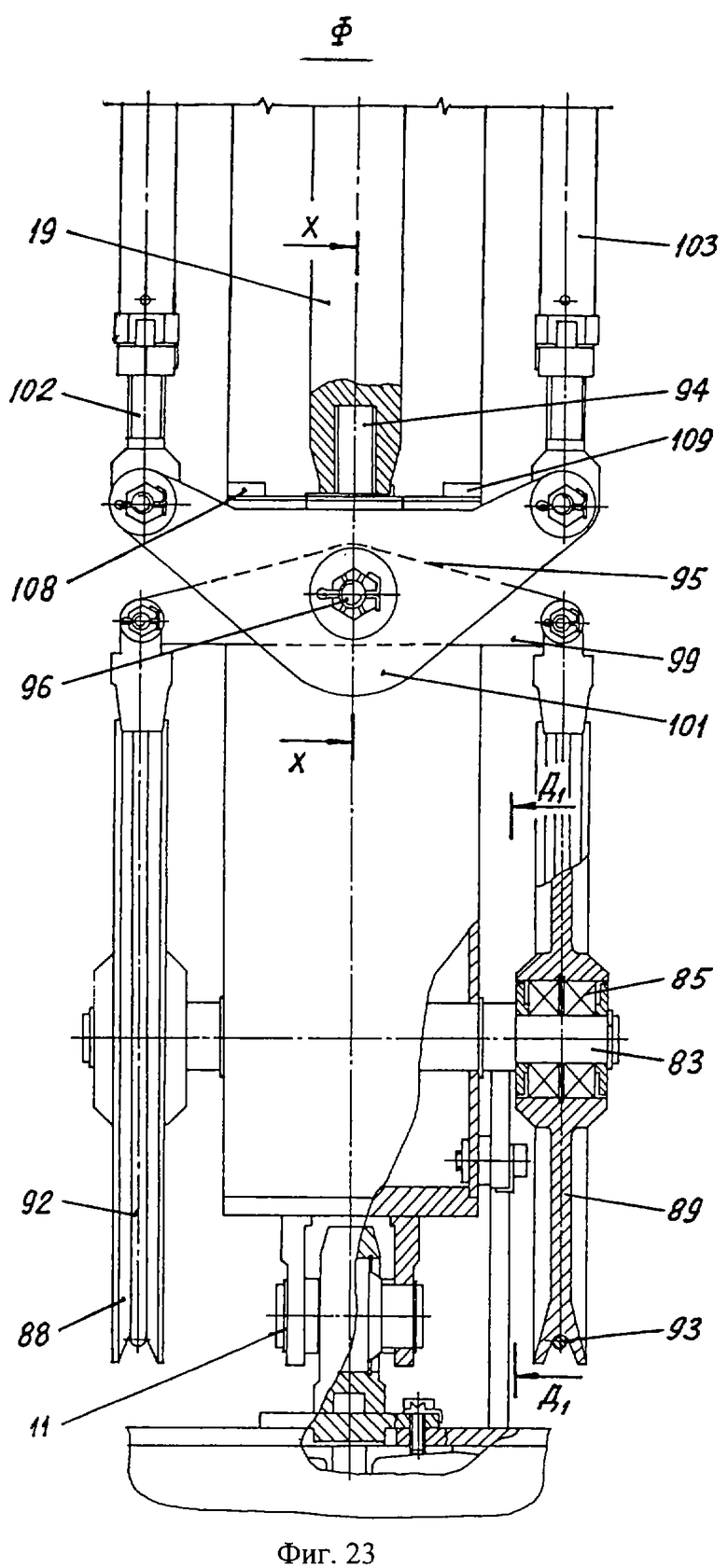
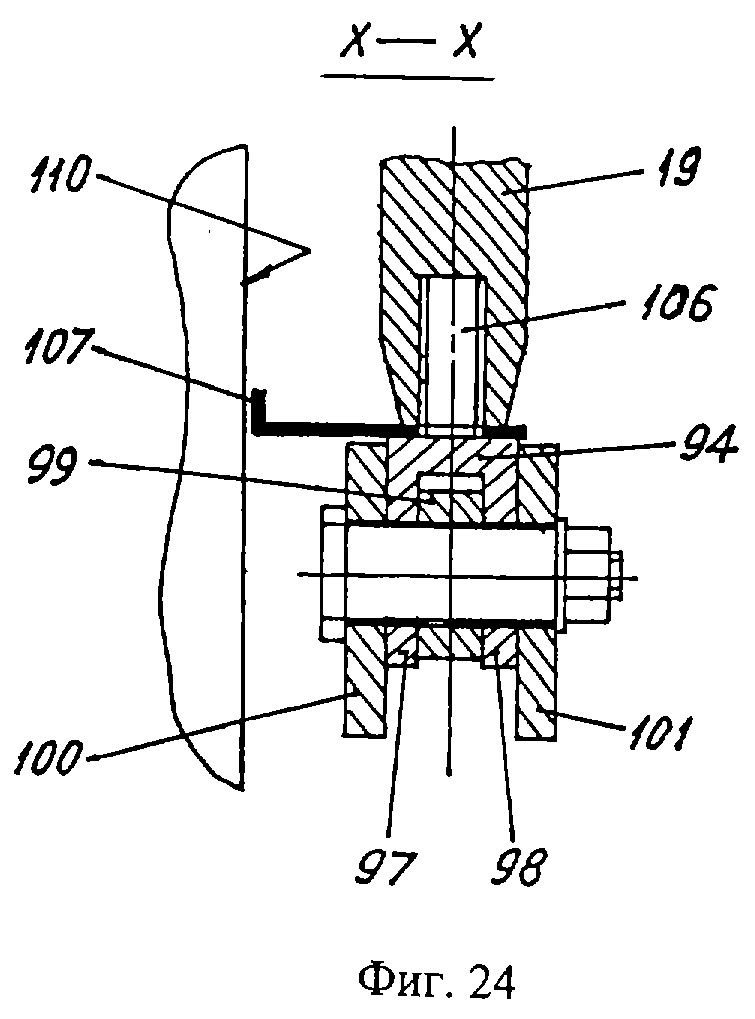

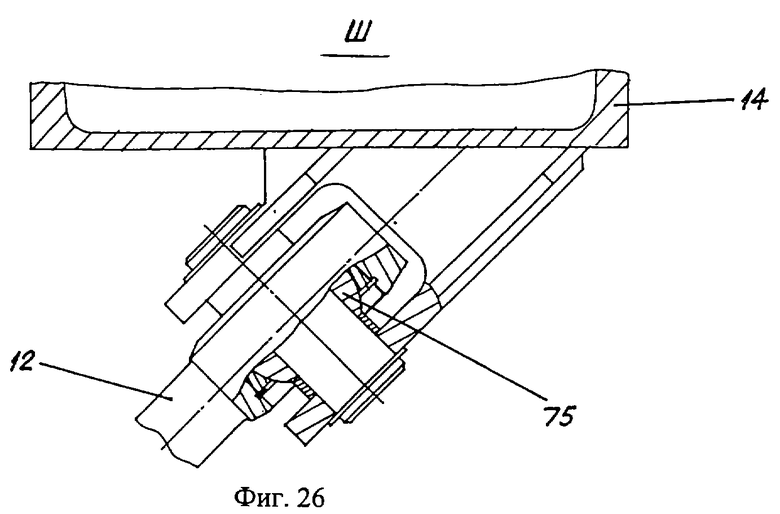
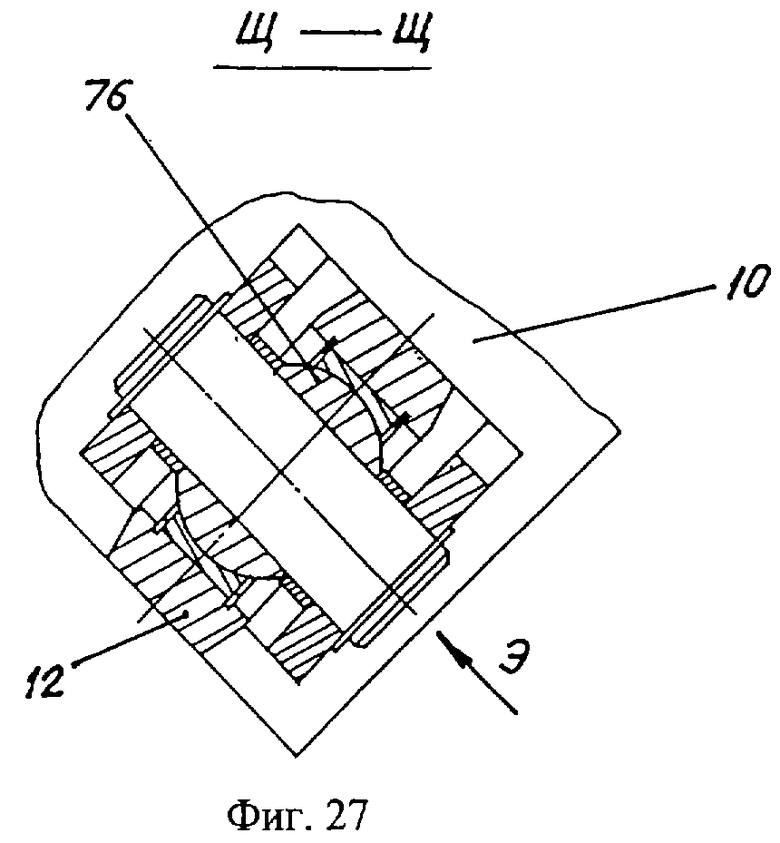
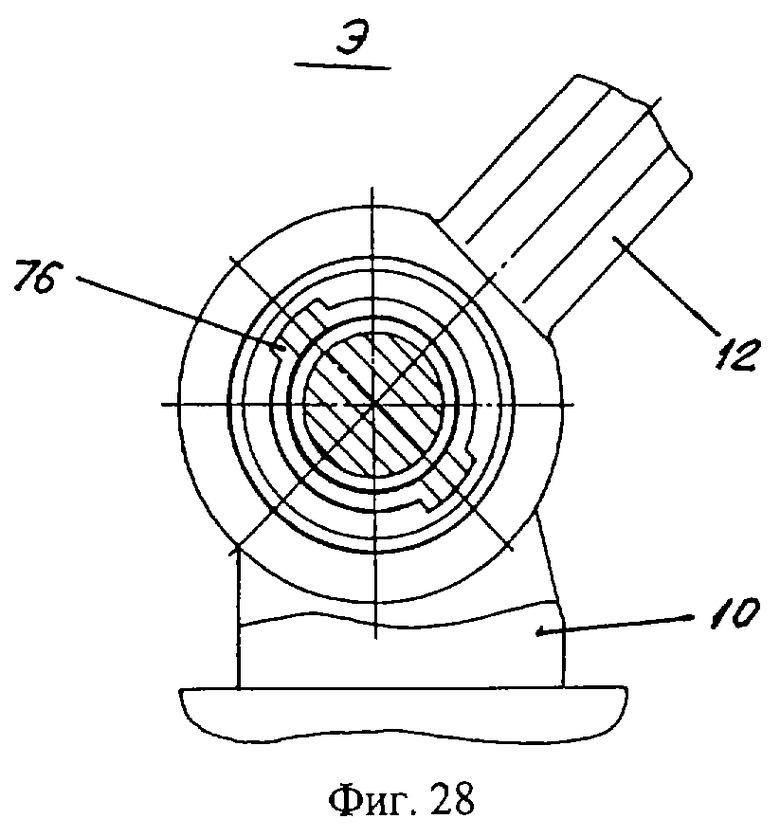
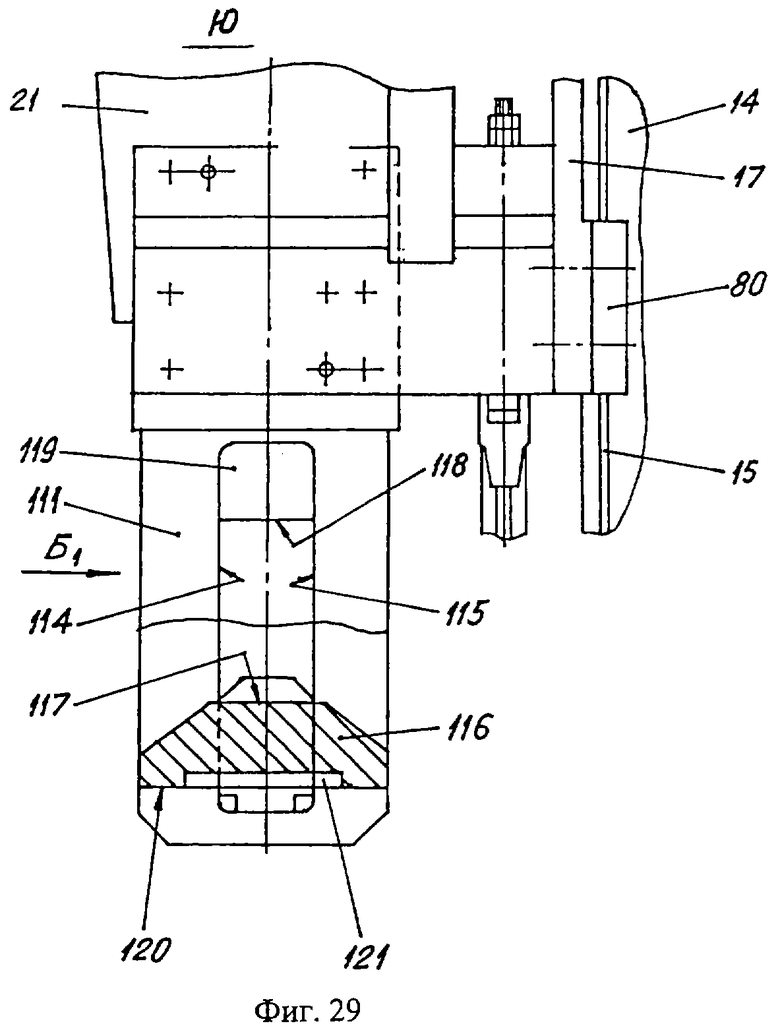
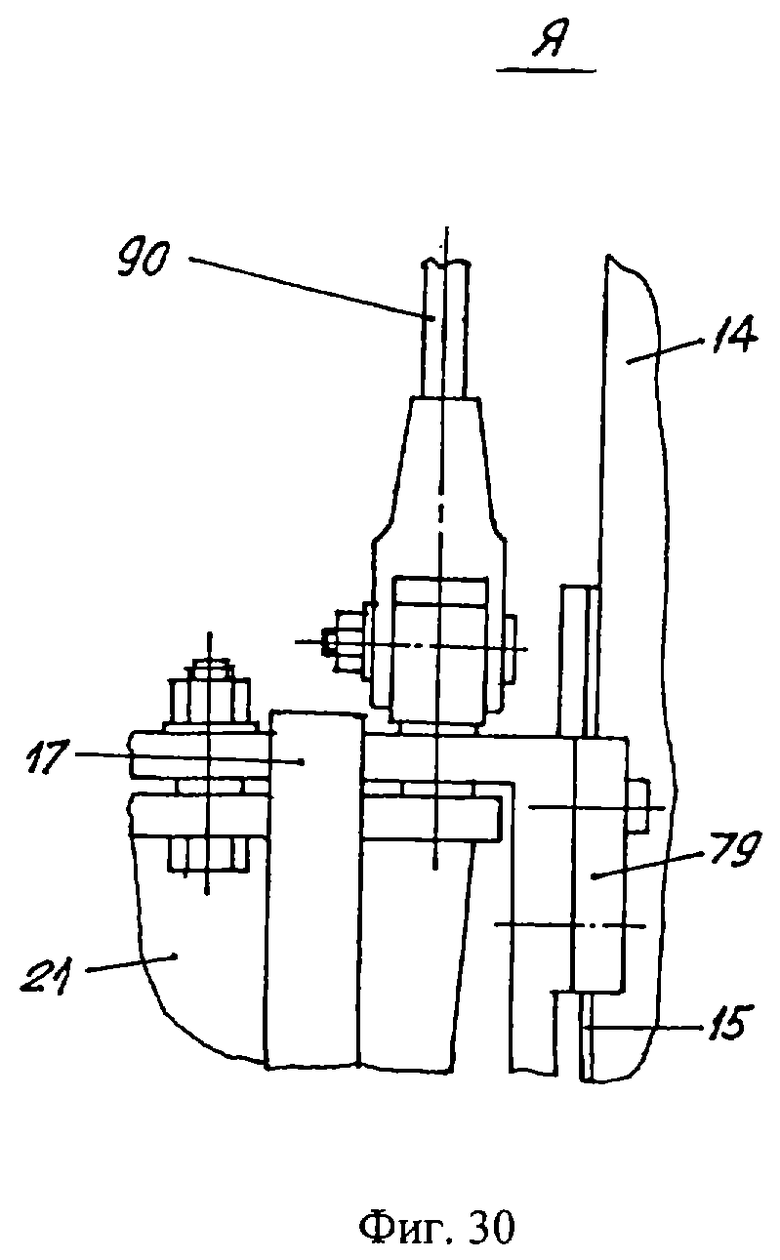
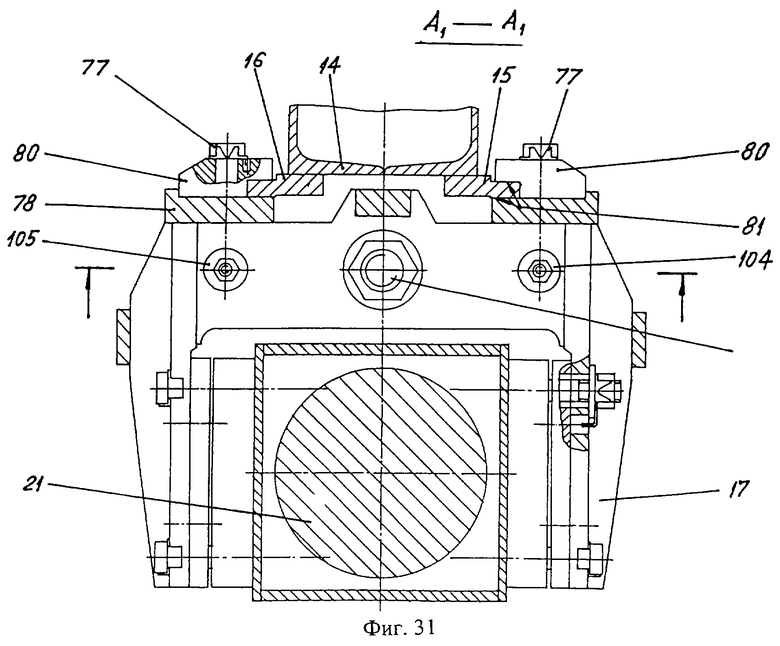
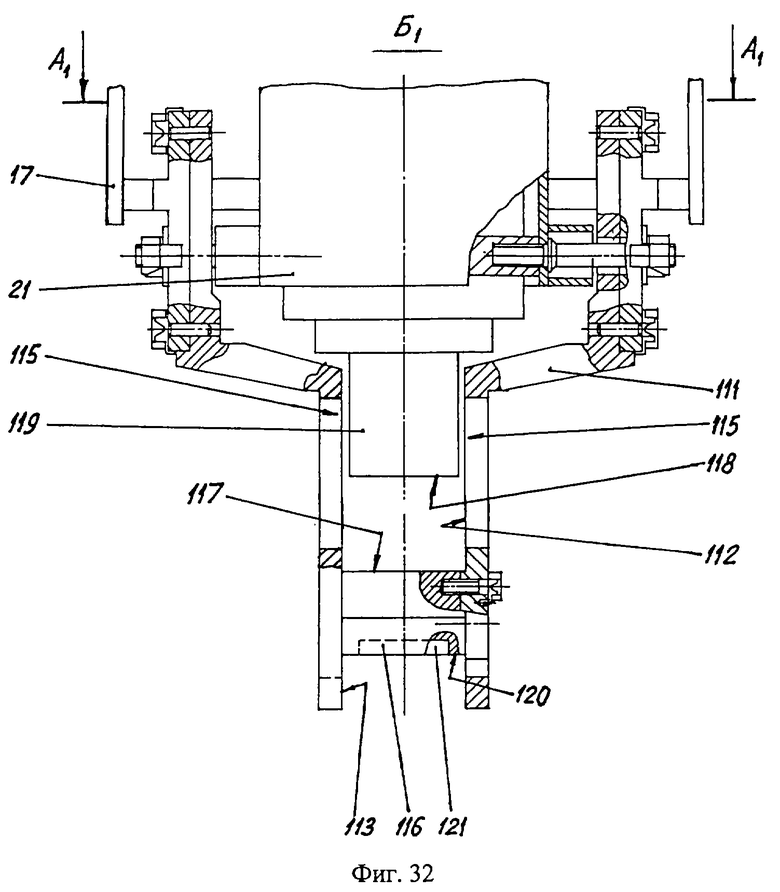


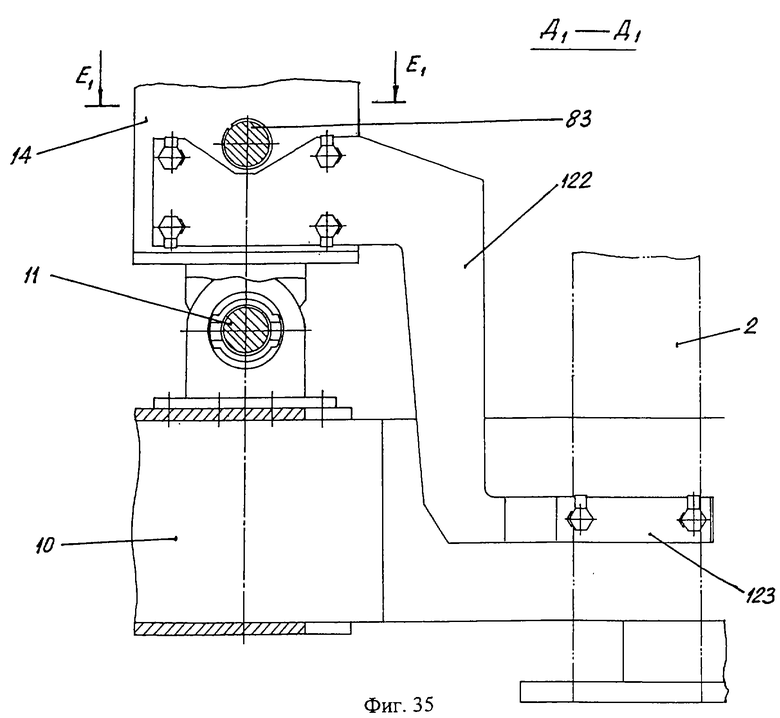
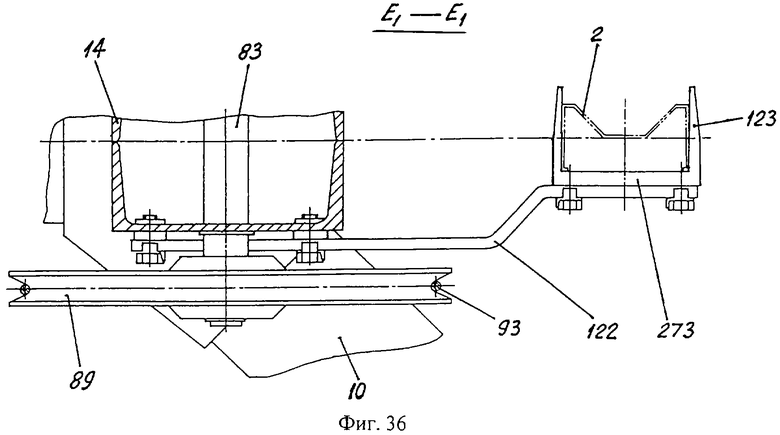
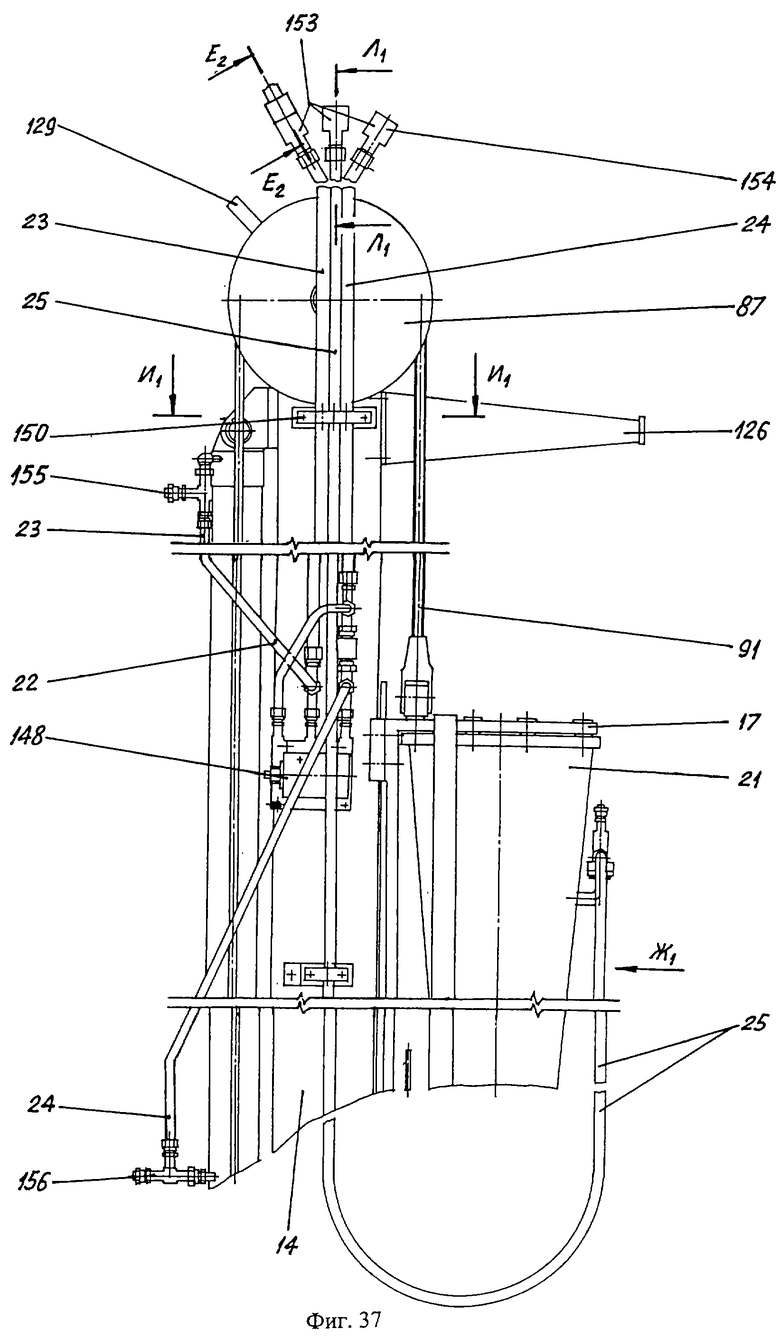
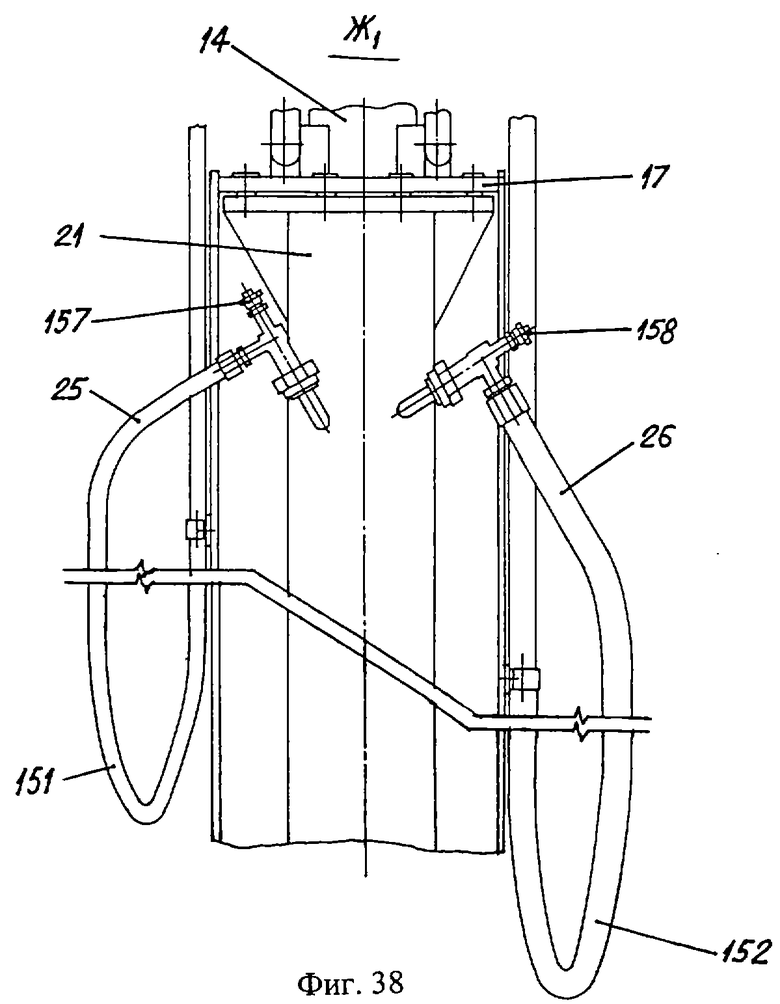

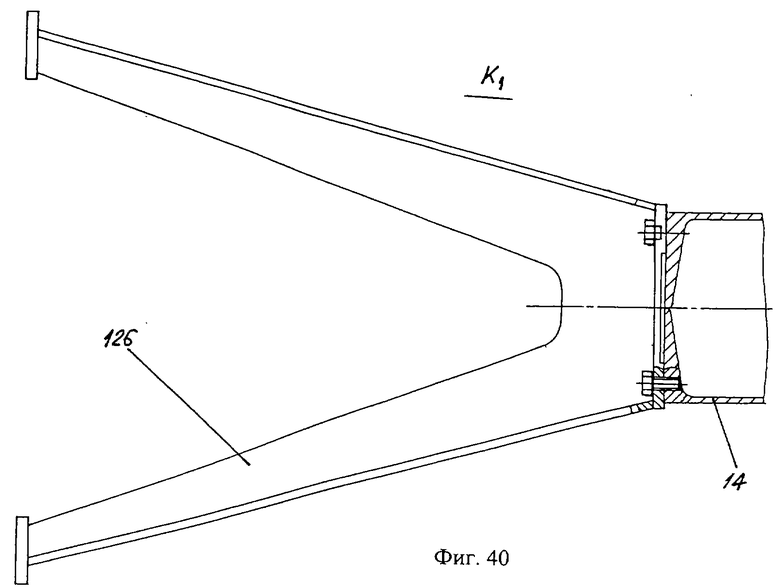
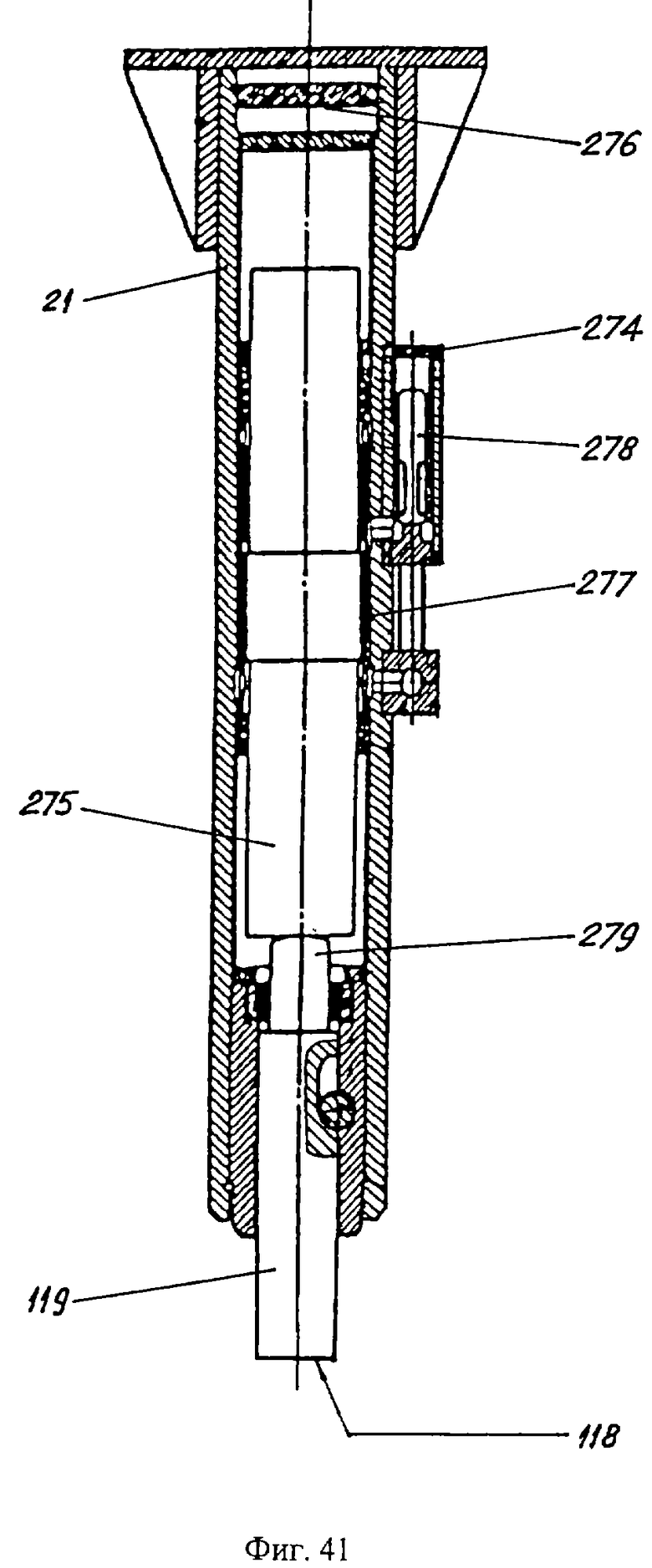
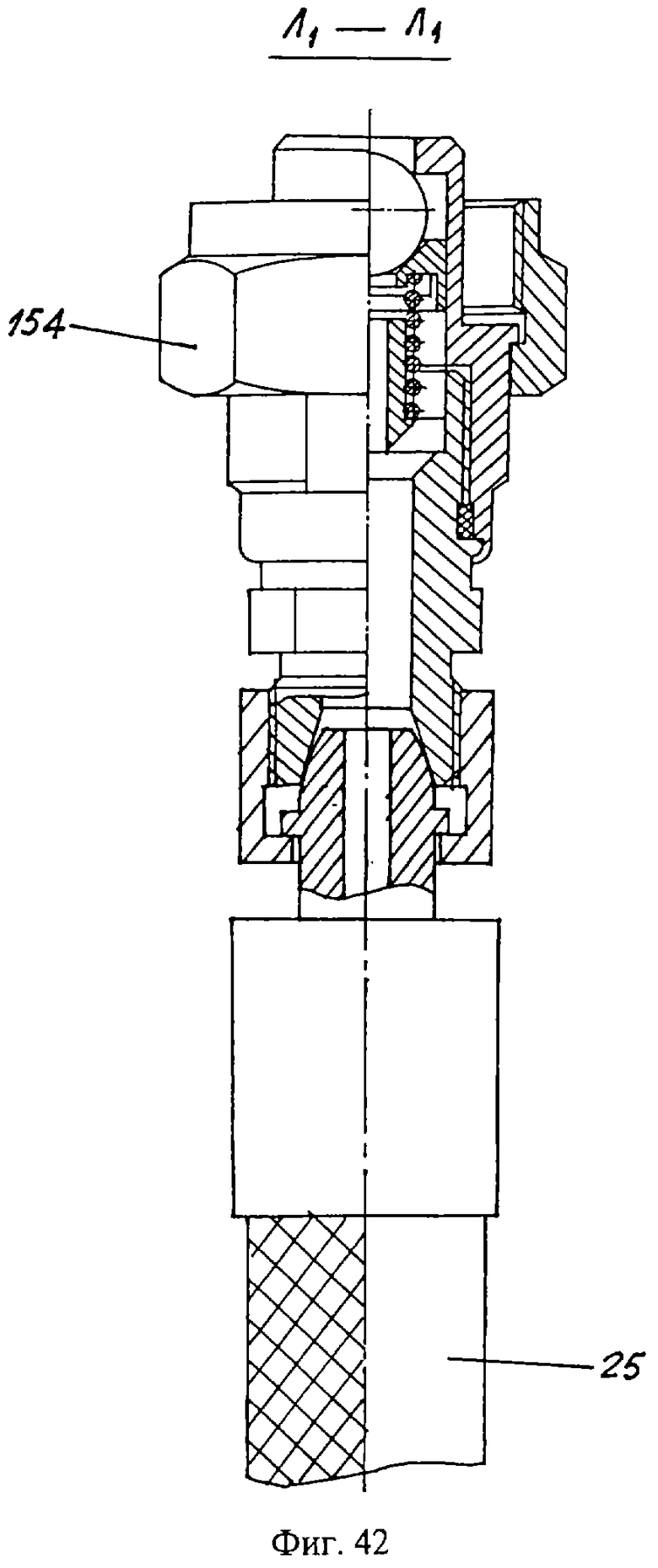
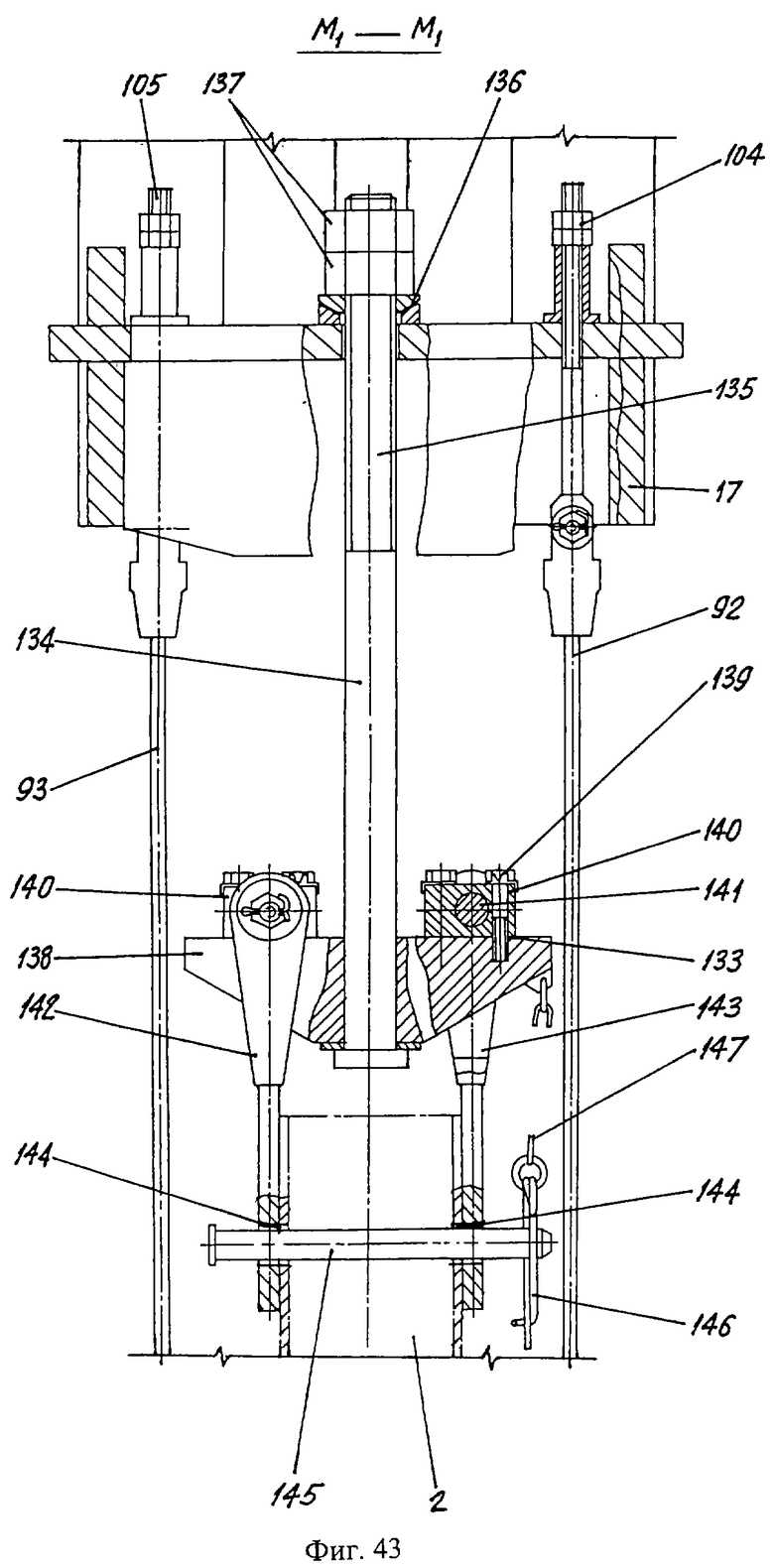

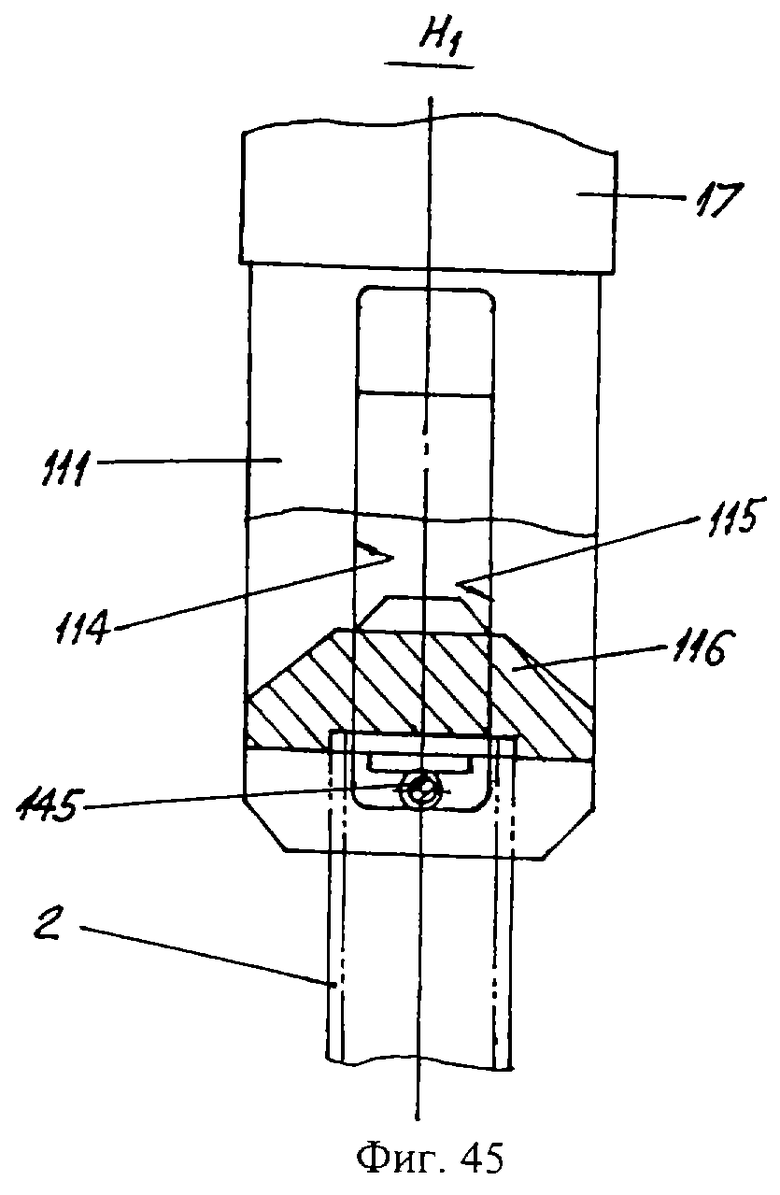
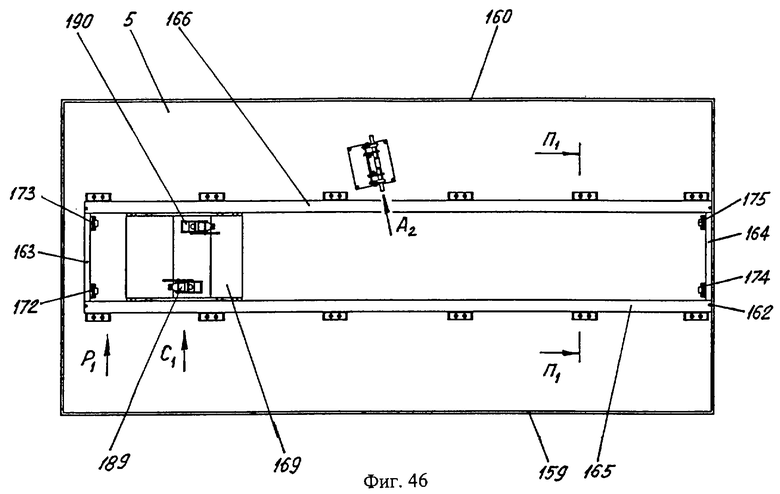
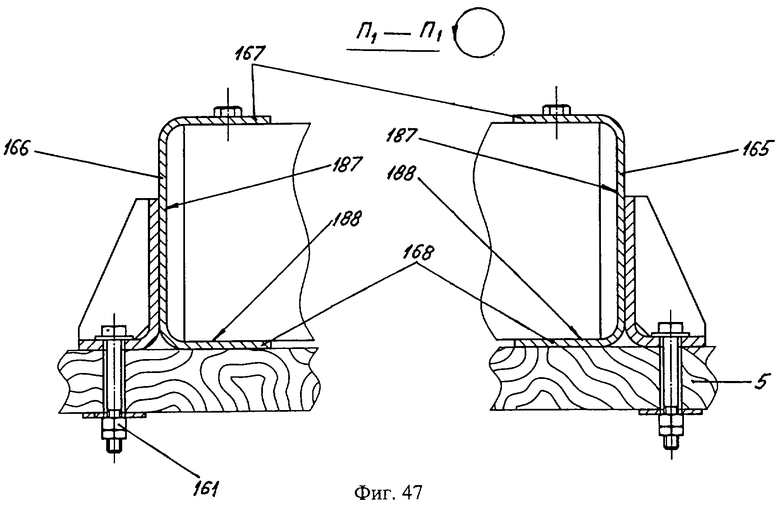

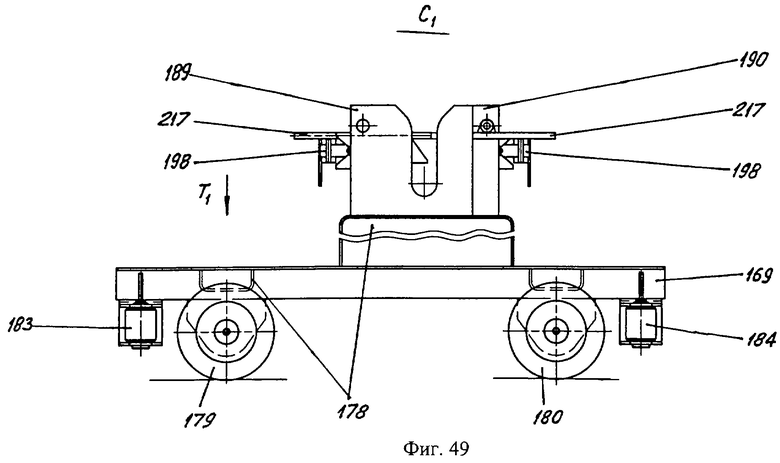

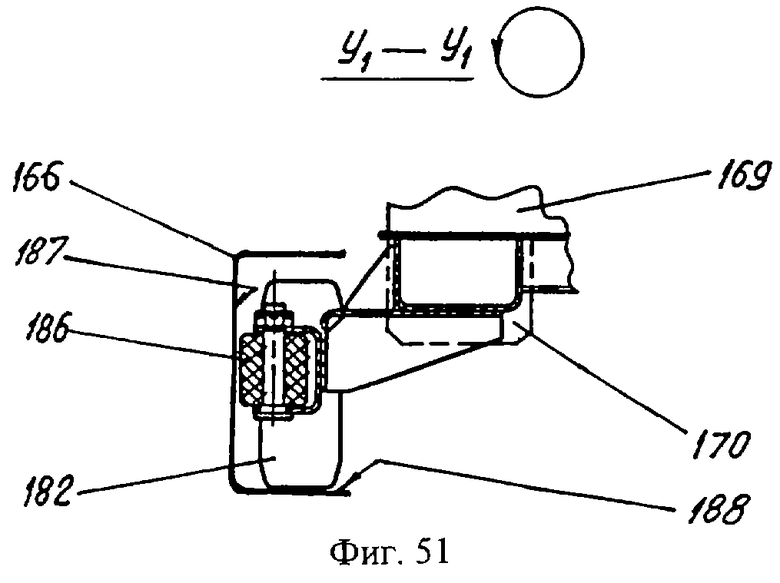


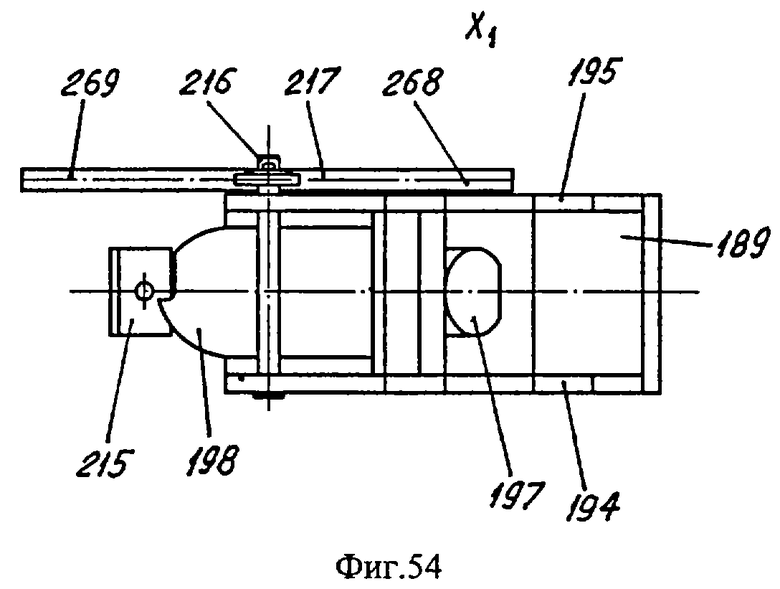

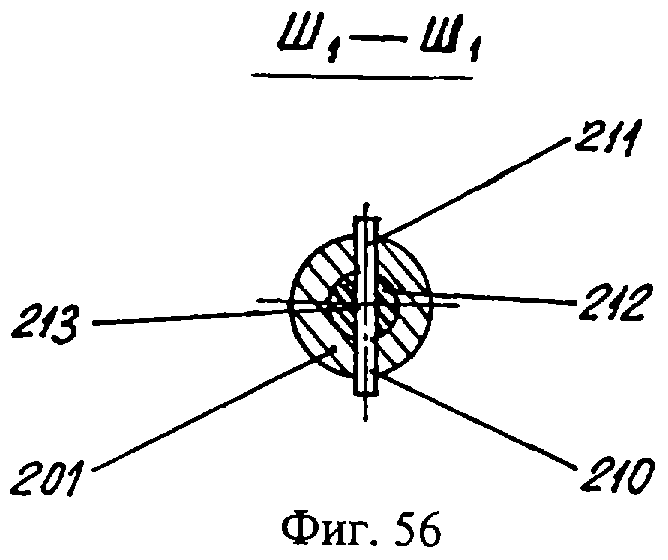


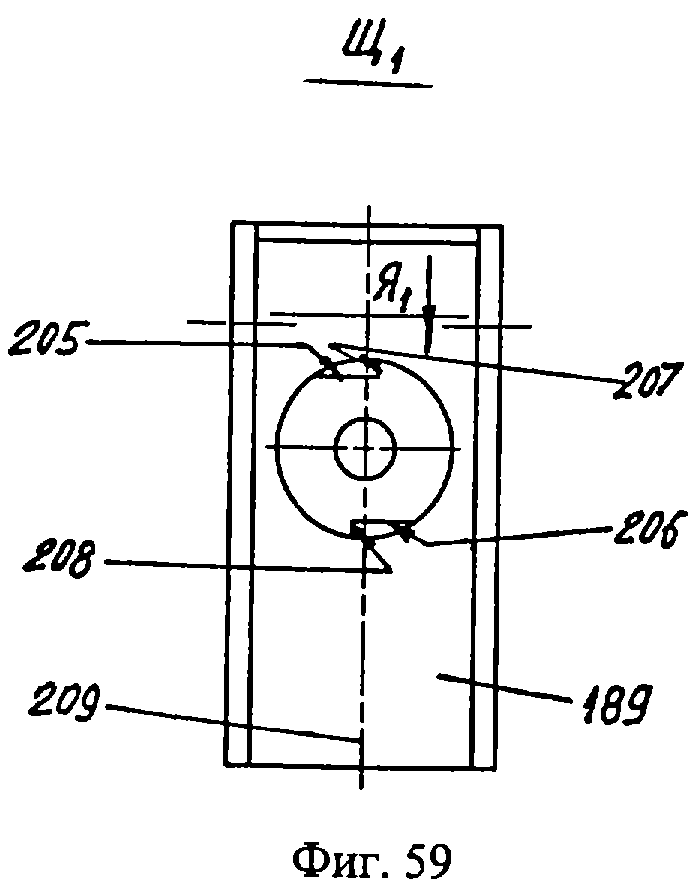
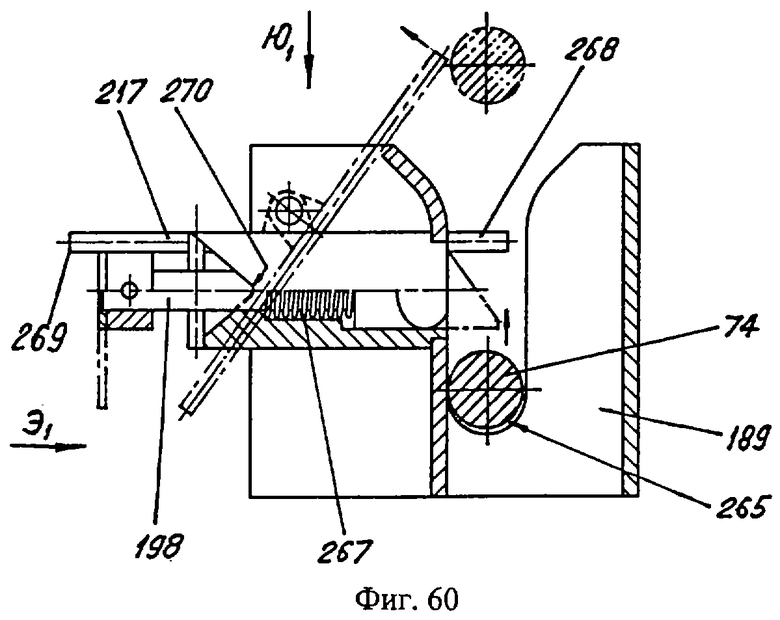
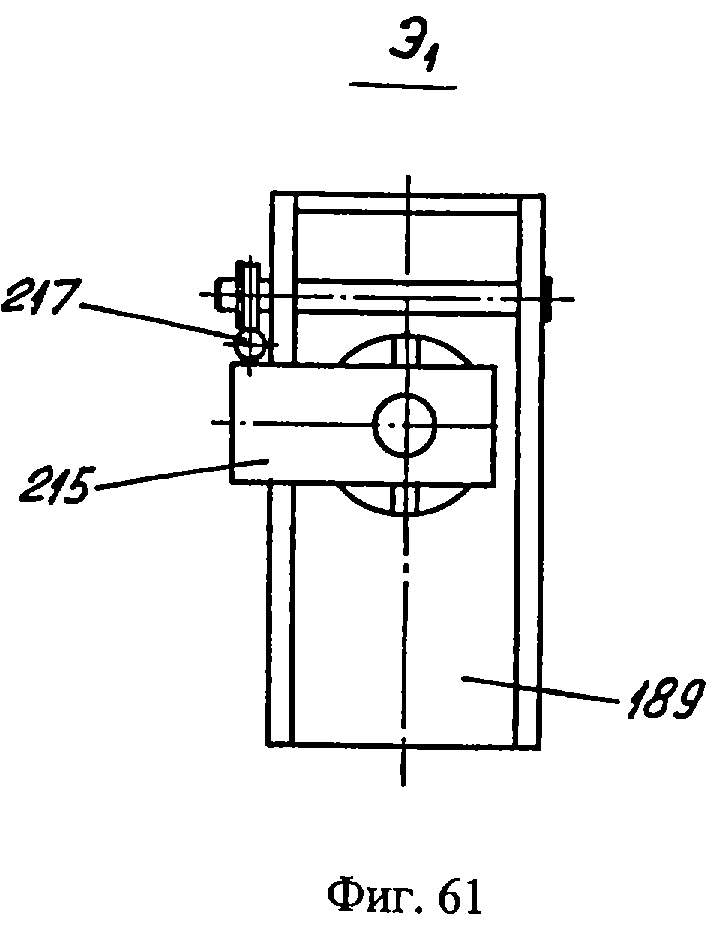
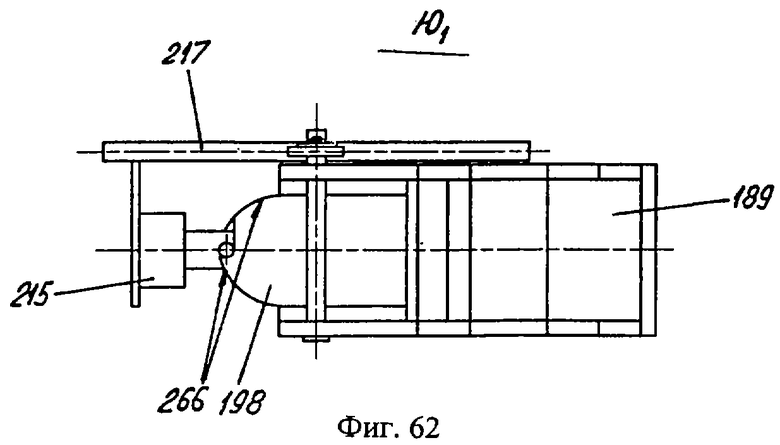
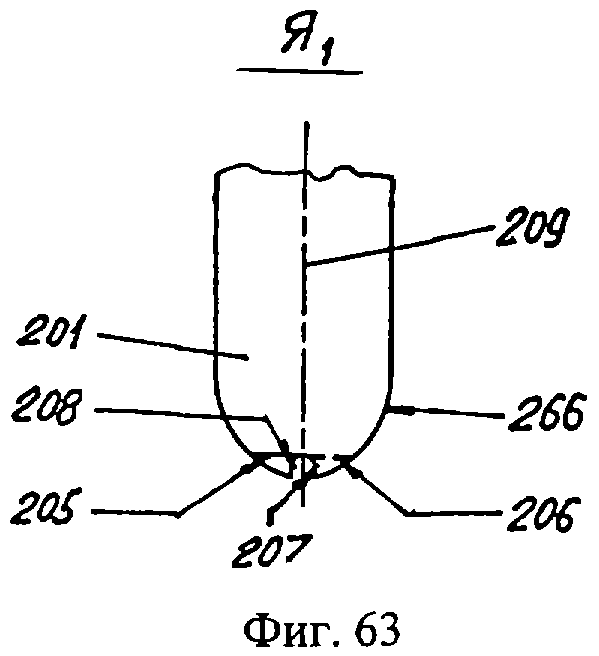
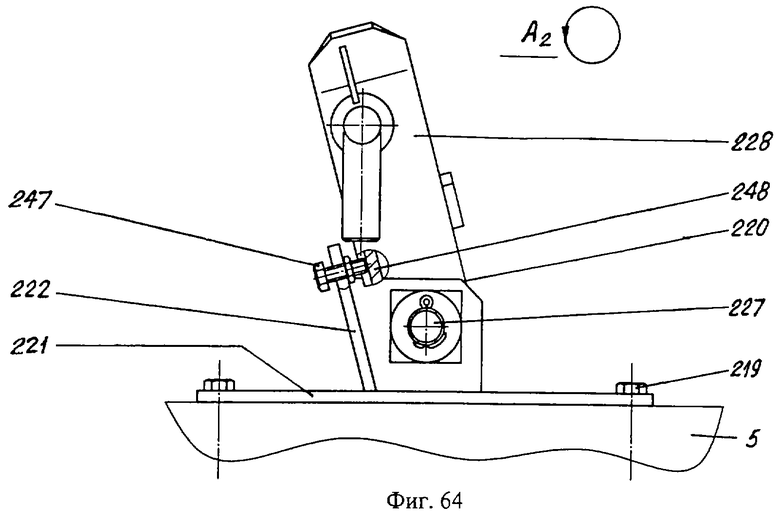
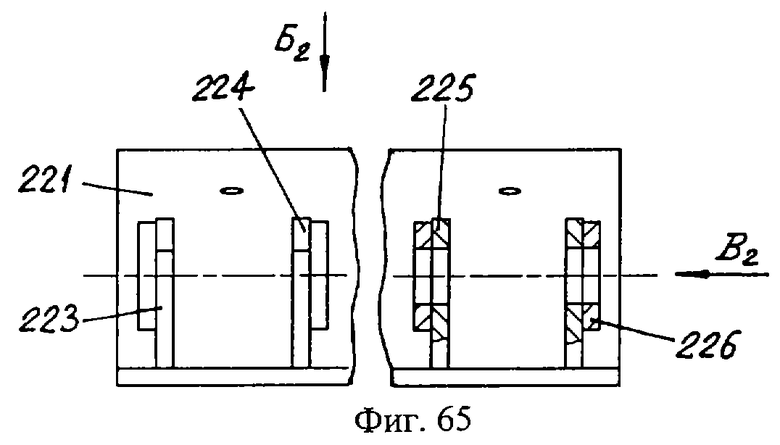
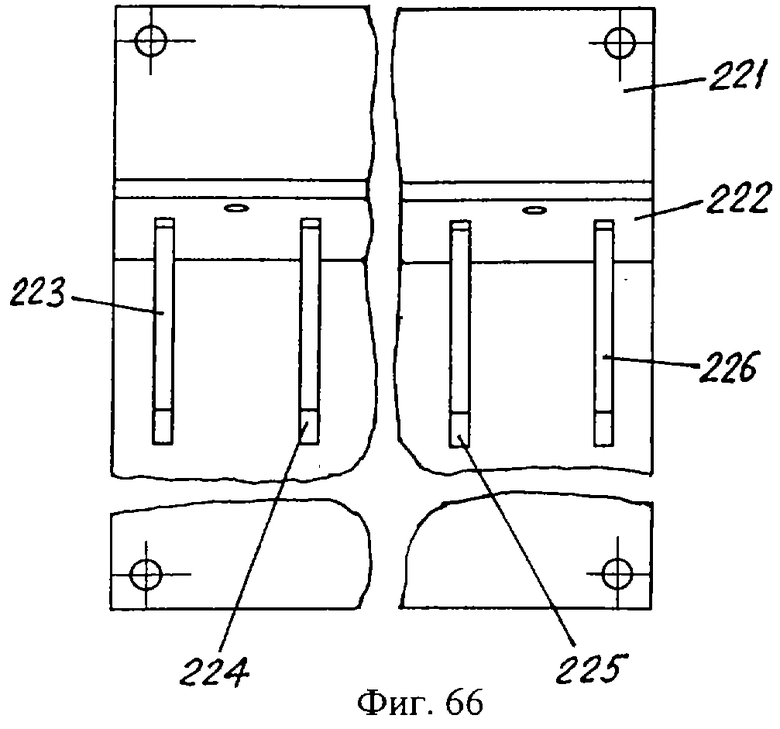


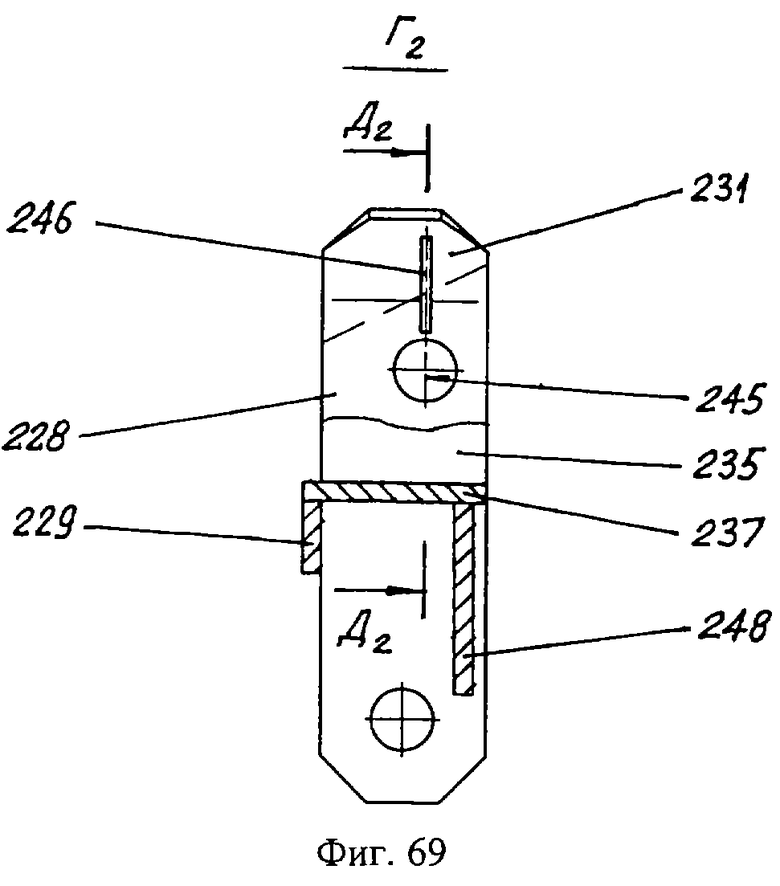

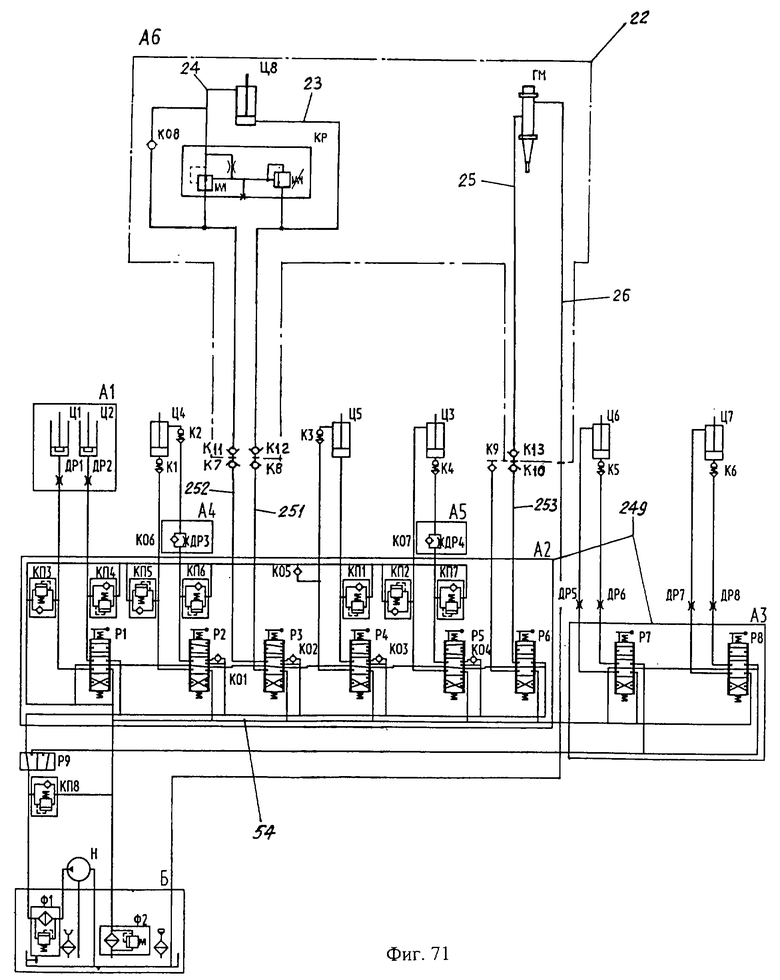
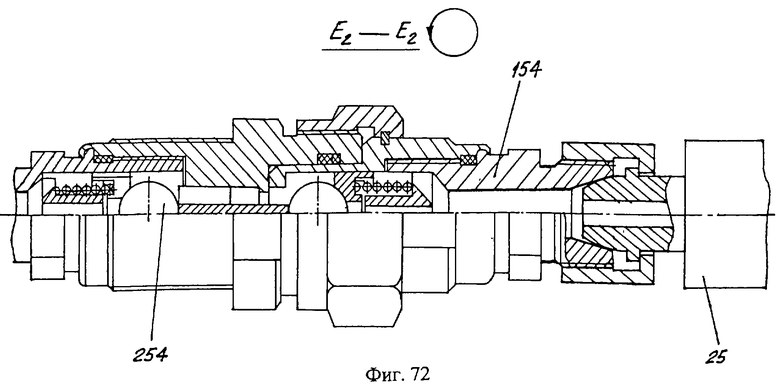

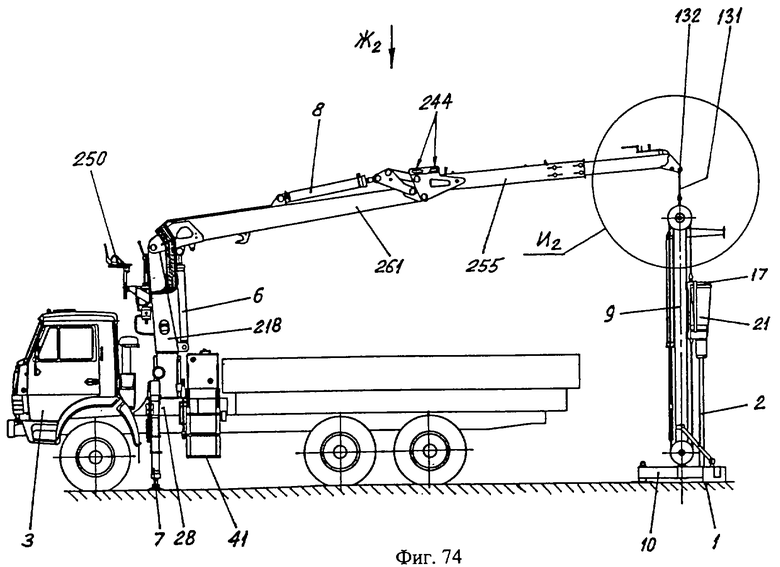
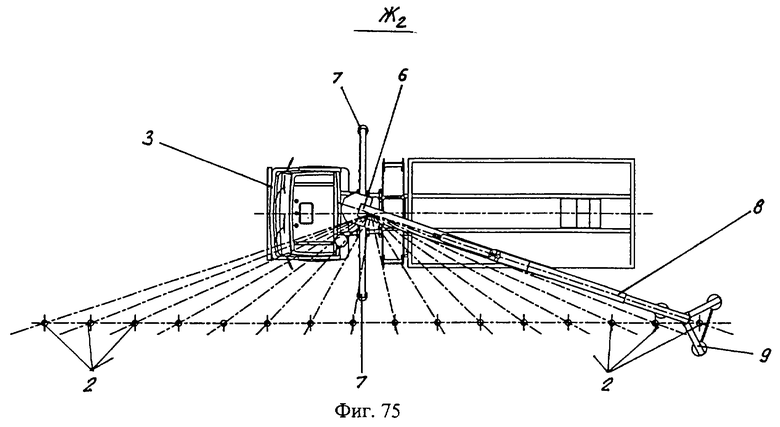
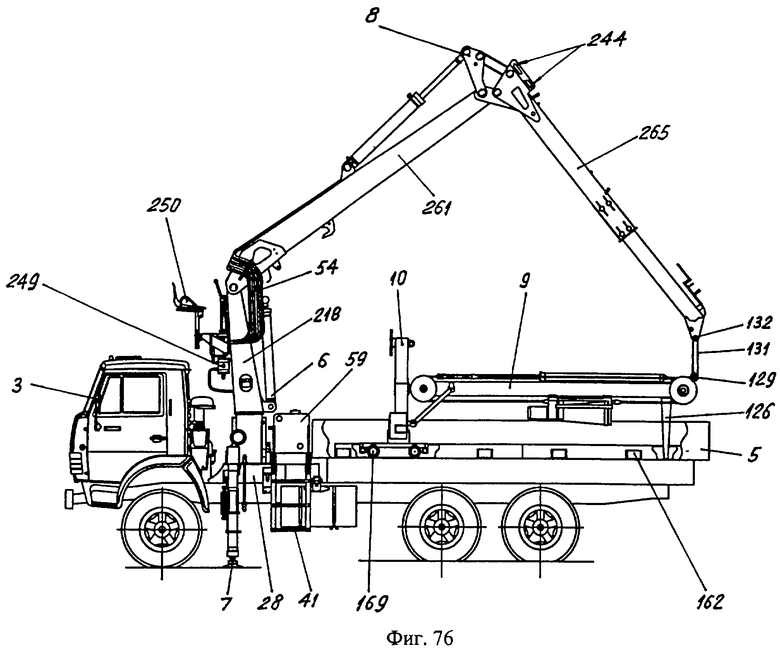
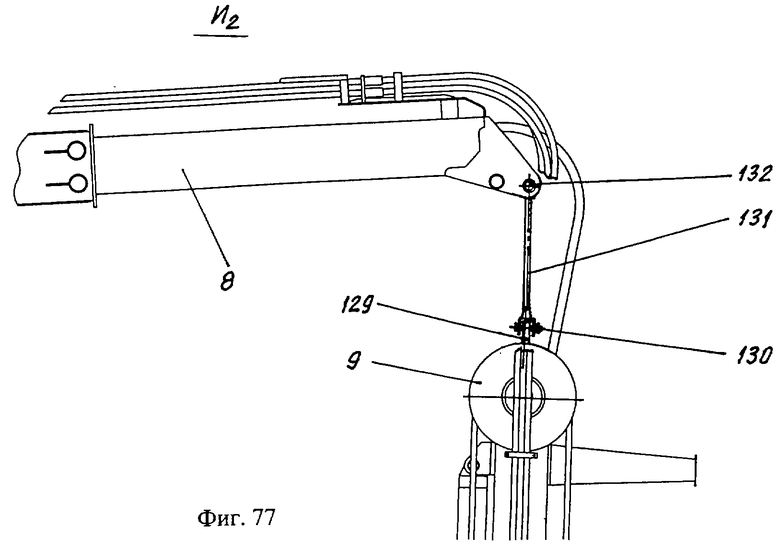
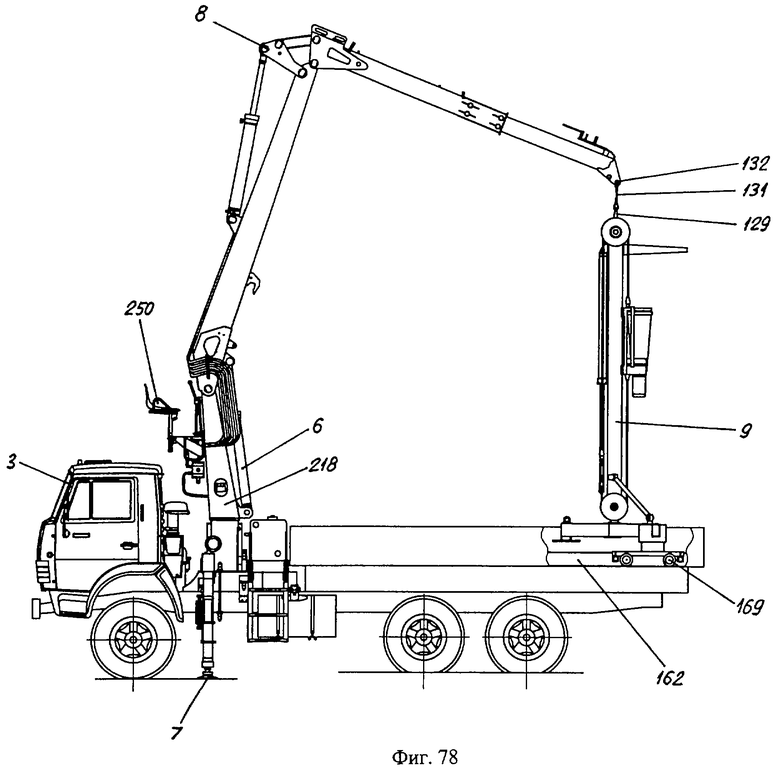
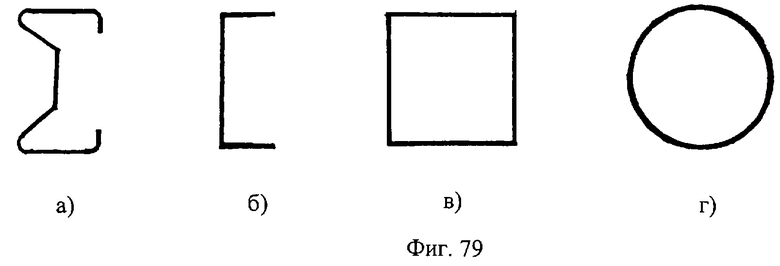
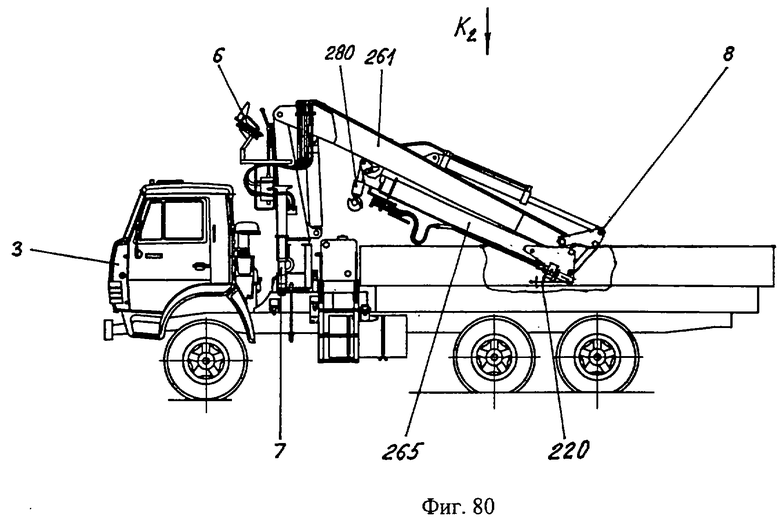
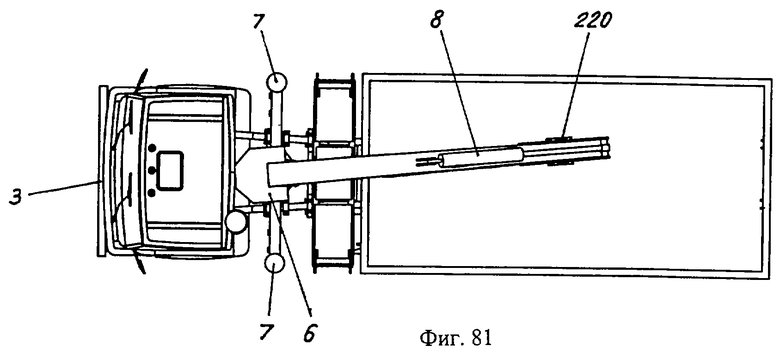
Изобретение относится к дорожному строительству, а именно к технологии и копровому оборудованию для забивания и извлечения из грунта металлических столбиков и может быть использовано преимущественно при возведении и ремонте барьерных ограждений автомобильных дорог. Для забивания и извлечения из грунта металлических столбиков предлагаются соответствующий способ и копровый манипулятор для его осуществления, содержащий автомобильный тягач, размещенную между его кабиной и кузовом гидравлическую манипуляторную установку с выносными аутригерами и многозвенной шарнирно-рычажной поворотной стрелой и подвешенный на конце стрелы мобильный переносной копер. В заявляемом техническом решении оптимизированы соответствующим образом конструкция и кинематика входящих в состав копрового манипулятора ряда основных агрегатов, их компоновка и технология производства работ с использованием указанного копрового оборудования. В результате изобретения упрощается конструкция и улучшаются технико-эксплуатационные качества копрового оборудования, а также оптимизируется способ производства указанных работ с его использованием. 2 с. и 4 з.п.ф-лы, 81 ил.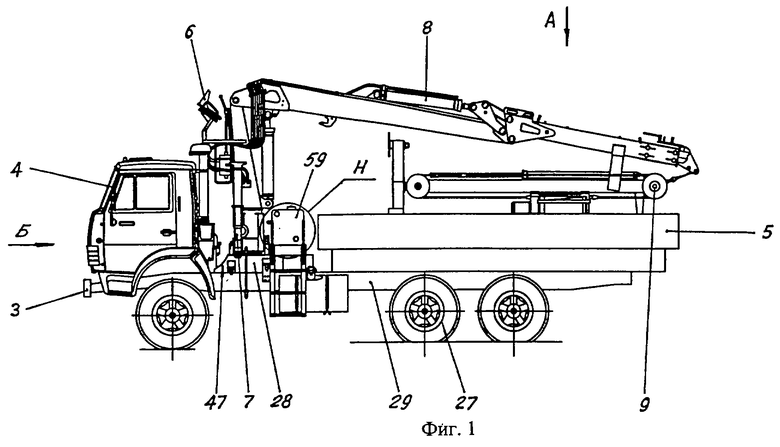
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| УСТРОЙСТВО для ПОГРУЖЕНИЯ в ГРУНТ СВАЙ и ДРУГИХ ПОДОБНЫХ ЭЛЕМЕНТОВ | 0 |
|
SU218062A1 |
| САМОХОДНЫЙ СВАЙНЫЙ КОПЕР | 0 |
|
SU236338A1 |
| Навесное копровое устройство | 1979 |
|
SU861472A1 |
| Установка для сооружения свай в грунте | 1981 |
|
SU969823A1 |
| Устройство для установки опор ограждающих конструкций | 1985 |
|
SU1362782A1 |
| Копровая установка | 1990 |
|
SU1760015A1 |
| US 3507338, 21.04.1970. | |||

