Изобретение относится к медицинской технике, в частности к инвалидным коляскам для самостоятельного передвижения как по ровной, наклонной поверхностям, так и по лестничным маршам.
Известна инвалидная коляска [1], содержащая раму, сиденье, ведущие и ведомые колеса, а также приспособление для передвижения по лестничным маршам, выполненное в виде установленных на ведущих колесах радиальных, подпружиненных телескопических штырей с фиксатором исходного положения и двух прикрепленных к раме и имеющих возможность перемещаться относительно плоскости, проходящей через точки опоры колес, полозовидных опор (лыж).
Недостатки известной коляски при движении по лестничным маршам - соскакивание штырей на находящуюся ниже ступень в случае попадания наконечника штыря на край ступени, что нарушает плавность хода, сложная конструкция ведущих колес (телескопические штыри, радиальные направляющие, пружины, фиксаторы), необходимость времени на подготовку ведущих колес (выдвижение штырей, их фиксация) и невозможность сиденья автоматически сохранять горизонтальное положение.
Известна и другая коляска, содержащая раму, установленное на ней с возможностью поворота в продольной вертикальной плоскости сиденье, передние и задние ходовые колеса, беговая часть которых выполнена с протектором, и связанные с рамой с возможностью подъема и опускания в продольных вертикальных плоскостях полозовидные опоры [2].
Новым в изобретении является то, что задние части полозовидных опор шарнирно связаны с рамой, передние их концы соединены с рамой посредством пружин сжатия с возможностью фиксации опор в их поднятом нерабочем положении. Сиденье связано с рамой посредством размещенных на продольных элементах последней втулок скольжения с возможностью продольного перемещения сиденья и фиксации его в требуемом положении. Коляска снабжена размещенным в ее нижней части с возможностью взаимодействия с опорной поверхностью лестничного марша упором для самоторможения коляски.
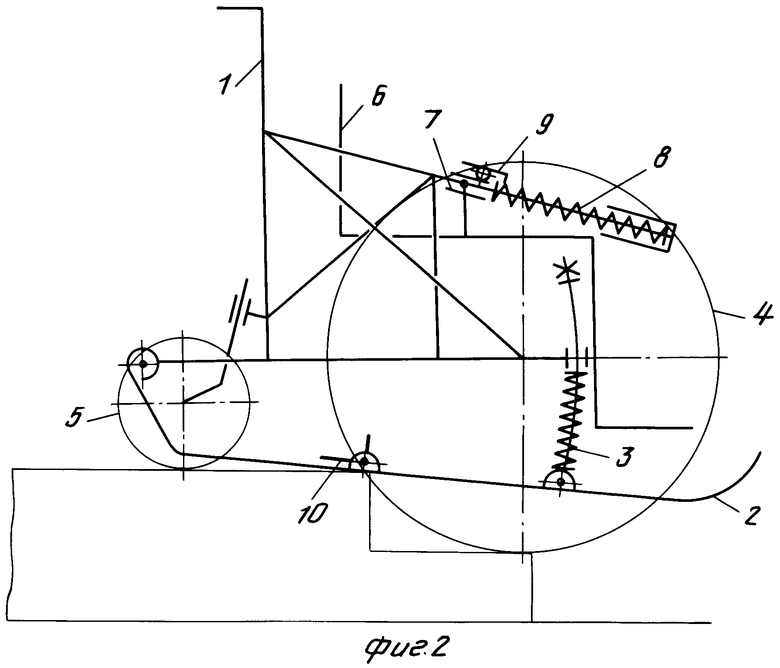
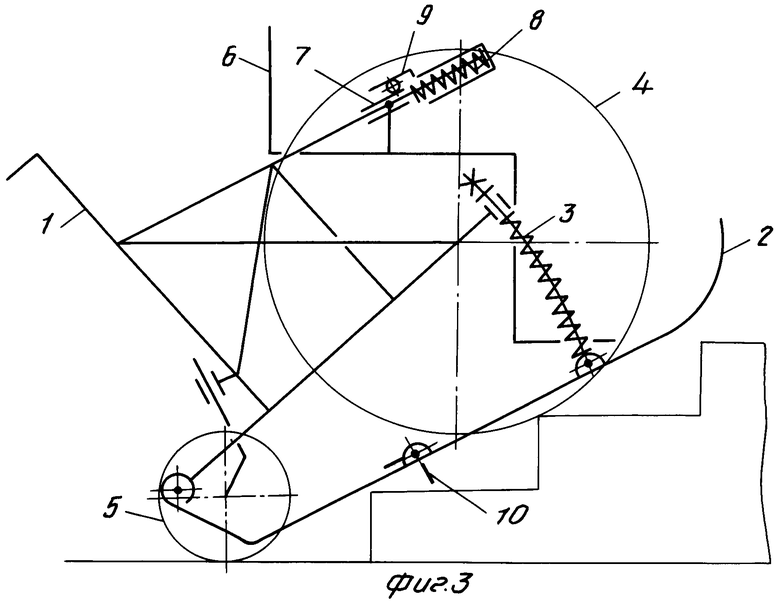
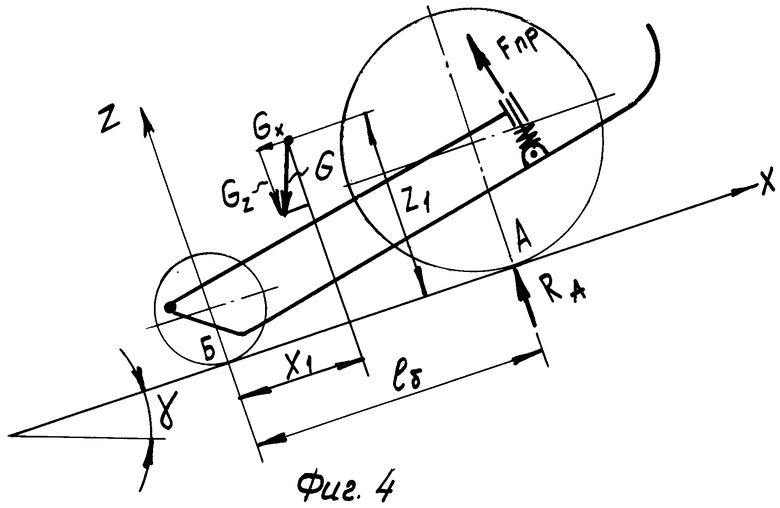
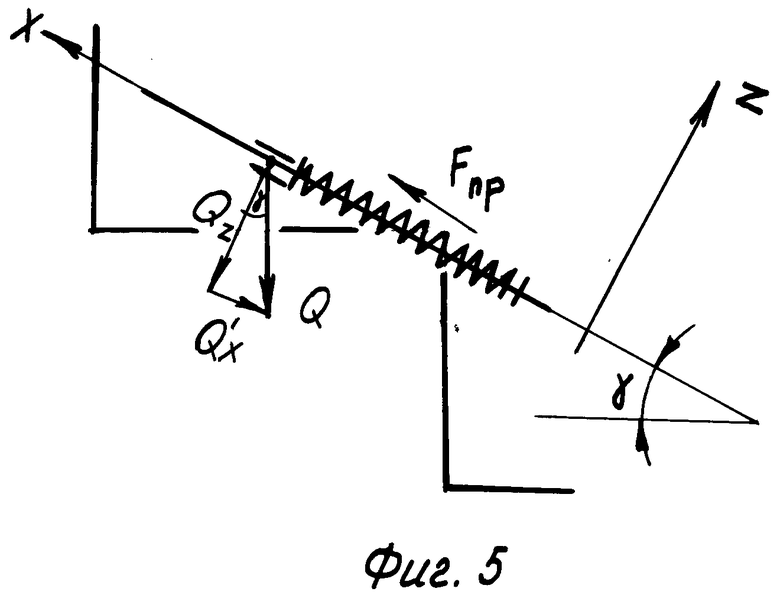
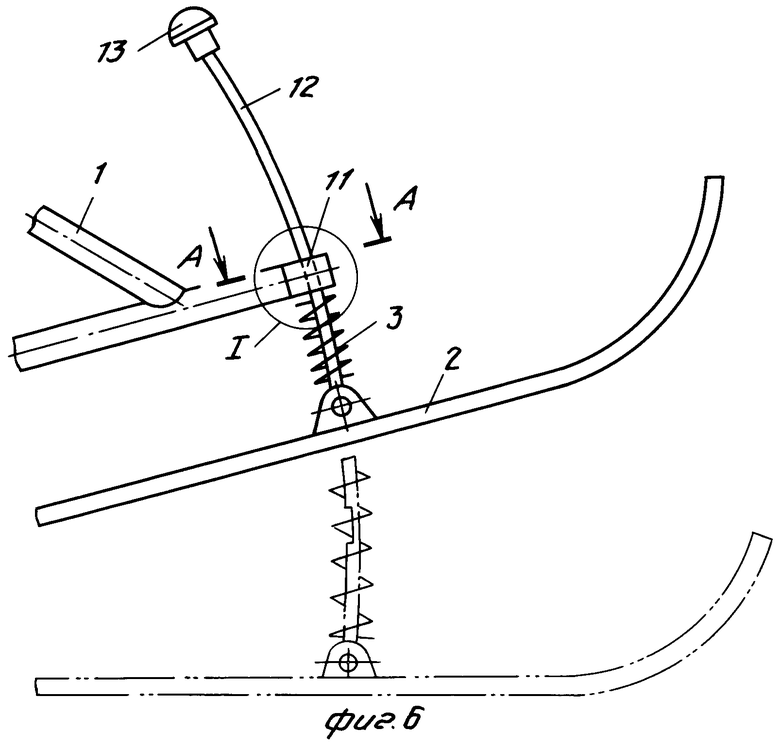
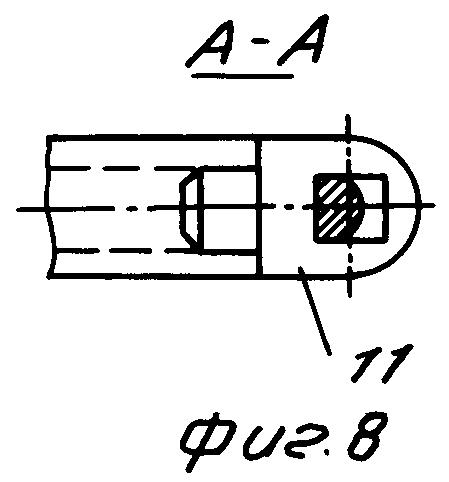
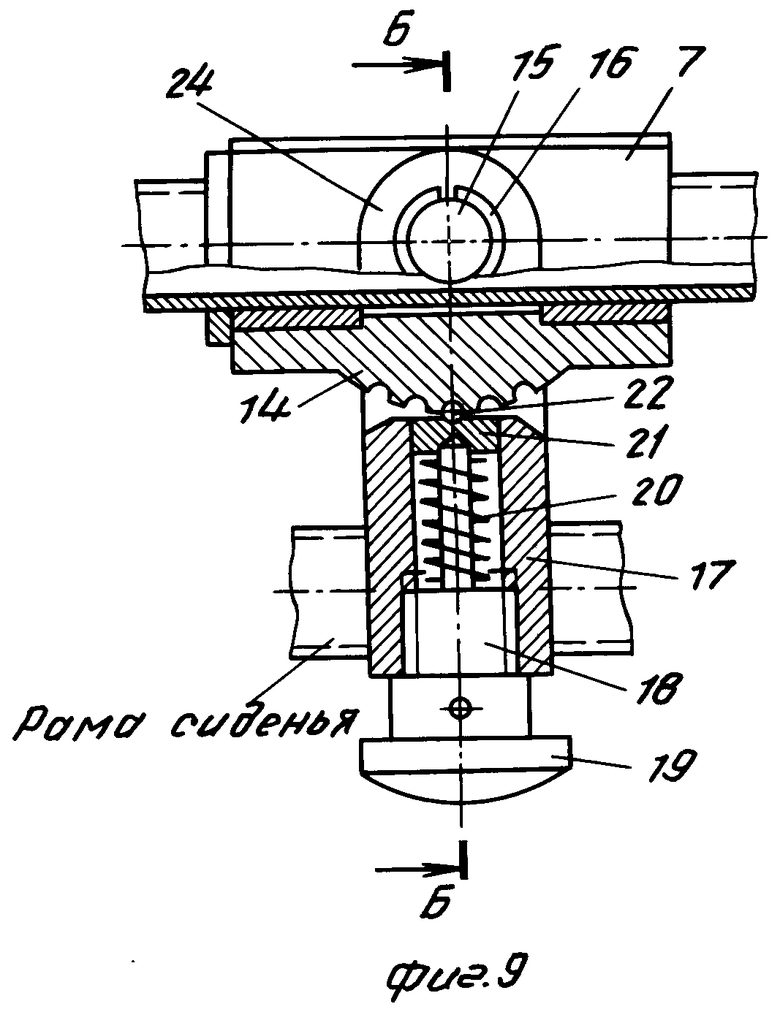
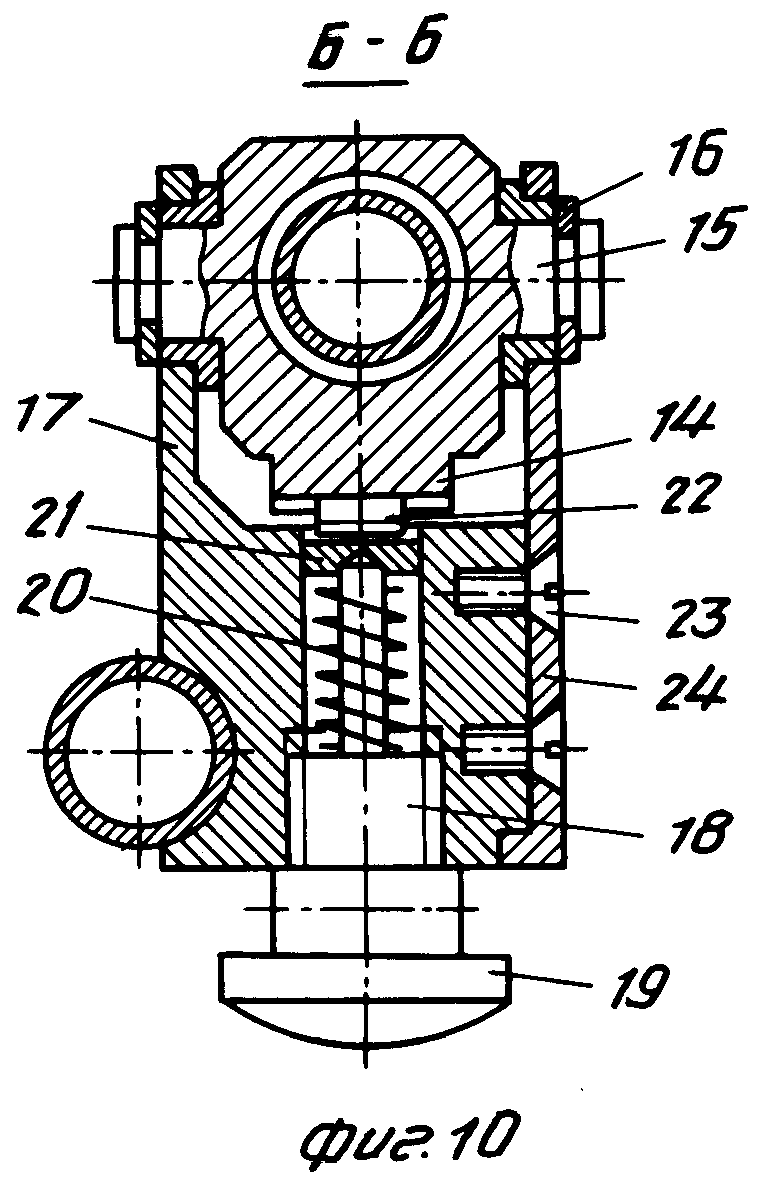
На фиг. 1 изображена коляска, вид сбоку; на фиг.2 - схема передвижения при спуске; на фиг.3 - то же, при подъеме; на фиг.4 - расчетная схема 1; на фиг. 5 - расчетная схема 2; на фиг.6 - фиксация опор; на фиг.7 - узел I на фиг. 6; на фиг.8 - разрез А-А на фиг.6; на фиг.9 - фиксатор горизонтального положения сиденья; на фиг.10 - разрез Б-Б на фиг.9.
Коляска состоит из жесткой рамы 1, шарнирно соединенной с парой полозовидных опор (лыж) 2 через пружины 3, передних (ведущих) 4 и задних (ведомых) 5 колес, кресла (сиденья) 6, шарнирно закрепленного на втулках скольжения 7 и удерживающегося в исходном положении пружинами 8, двух подпружиненных защелок 9 и упора 10.
Расчет усилий пружин сжатия 3 и 8 и силы сопротивления движению.
Исходные данные:
Рч = 80 кг - масса среднего человека;
Рк = 45 кг - масса коляски;
lб = 630 мм - продольная база коляски;
Х1 = 600 мм; Z1 = 560 мм - координаты центра тяжести коляски с инвалидом.
γ = 15o,25o,30o - угол наклона опорной поверхности.
Усилие пружин 3 должно быть меньше нагрузки на передние колеса, в противном случае произойдет отрыв колес от опорной поверхности или буксование.
Определяем минимальную нагрузку на передних колесах при максимальном сжатии пружин.
Суммарная сила тяжести G коляски с инвалидом:
G = Pк + Pч = 45 + 80 = 125 кгс.
Вертикальная Gz и горизонтальная Gx составляющие силы тяжести.
Gz = G˙cos γ = 125˙0,96593 =
= 120,74 кгс.
Gх = G˙sin γ = 125˙0,25882 = 32,4 кгс.
Реакция опорной поверхности на передние колеса RА.
Определяем из условия равновесия Σ MБ=0;
Gz ˙Х1 - Gx˙Z1 - RA˙lб = 0;
RA=  =
=  = 86,2 кгс
= 86,2 кгс
Нагрузка на передние колеса равна 86,2 кгс.
Fпр < 86,2 кгс. Принимает Fпр = 40 кгс.
Для исключения самопроизвольного перемещения сиденья с инвалидом на ось передних колес при спуске должно соблюдаться условие (инерцией масс, ввиду малой скорости передвижения, пренебрегаем): Fпр > Q'х, где Fпр - суммарное усилие пружин; Qх' - действующая сила.
Масса подвижной части Q: Q = Pч + Рс, где Рч = 80 кг - масса среднего человека; Рс = 3 кг - масса сиденья; Q = 80 + 3 = 83 кг.
Горизонтальная составляющая подвижной части Qх:
sin γ =  ; Qx = Q·sinγ
; Qx = Q·sinγ
Qх = 83 ˙0,5 = 41,5 кгс.
Действующая сила на пружины с учетом коэффициента трения скольжения f = 0,07 - 0,10 - коэффициент трения скольжения бронзы по стали со смазкой (Анурьев В.И. Справочник конструктора машиностроителя. М.: Машиностроение, 1979. Т. I, табл. 21, 98 с.)
Qfх = Qх˙ f = 41,5 (0,07 - 0,10) =
= 2,9 - 4,15 кгс;
Qх' = Qх - Qfх = 41,5 - (2,9 -
- 4,15) = 38,6 - 37,38 кгс.
Принимаем Fпр = 40 кгс. Суммарная сила, развиваемая правой и левой руками при движении к себе в положении сидя, равна 47,2 + 42,6 = 89,8 кгс (Долин П.А. Справочник по технике безопасности. М.: Энергоатомиздат, 1985, табл. 9.6, 437 с.).
Определение силы сопротивления движению Gх при угле наклона γ = 25o
sin γ = 
Gх = G˙sin γ = 125˙0,42262 = 52,8 кгс.
Коляска передвигается следующим образом.
Перед спуском полозовидные опоры (лыжи) 2 опускаются вниз, после чего ведущие колеса 4 мягко за счет полозовидных опор (лыж) 2 и пружин 3 шагают по ступеням, при этом сиденье кресла 6 сохраняет горизонтальное положение за счет веса инвалида. От самопроизвольного скатывания коляска удерживается тормозами ведущих колес 4. Поворот осуществляется путем блокировки одного из ведущих колес 4.
Перед подъемом также опускаются вниз полозовидные опоры (лыжи) 2, затем для создания полезной нагрузки (исключить буксование) инвалид, сидя в кресле 6, сжимая руками пружины 8, перемещается на ось ведущих колес 4 и автоматически фиксируется там защелками 9, далее опускается упор 10, который обеспечивает самоторможение коляски независимо от тормозов ведущих колес 4. Принцип движения на подъем такой же, что и на спуск.
Перед движением по ровной поверхности полозовидные опоры (лыжи) 2 фиксируются в верхнем положении, затем нажимают на защелки 9, и пружины 8, распрямляясь, возвращают кресло 6 с инвалидом в исходное положение, далее убирается упор 10. По ровной поверхности коляска передвигается на колесах 4 и 5.
Чтобы опустить опоры 2 вниз, достаточно вывести из зацепления (усилие рук от себя) с краями отверстий втулок 11, пазы дугообразных стержней 12 и цилиндрические пружины сжатия 3, установленные на этих стержнях, нижние концы которых шарнирно соединены с опорами 2, а верхние вставлены в отверстия втулок 11, и от выпадания фиксируемые кнопками 13, разжимаясь, опустят их вниз за счет того, что задние части рамы 1 коляски и опор 2 шарнирно соединены между собой. Фиксация опор 2 в верхнем положении также за счет пазов дугообразных стержней 12 )усилие рук вверх и на себя). Под корпусом втулки скольжения 7, имеющей внизу сектор с зубьям 14 (гнезда для ролика), а с боков цапфы 15, на концах которых в канавках имеются пружинные, упорные кольца 16, препятствующие осевому перемещению сиденья кресла, подающие возможность свободного поворота относительно горизонтальной оси, устанавливают пружинный роликовый фиксатор, состоящий из щеки-корпуса 17, винта-штока 18, поворотной кнопки 19, цилиндрической пружины сжатия 20, пяты 21 и ролика 22. К щеке-корпусу с наружной стороны винтами 23 крепится вторая щека 24, а к внутренней приваривается рама сиденья кресла 6.
Фиксация сиденья кресла может быть упругой и жесткой, ступенчатой - с остановкой через заданные интервалы. В первом случае под действием пружины 20 (для чего поворотной кнопкой 19, жестко насаженной на нижней конец винта - штока 18, его выкручивают на определенную высоту) ролик 22 заскакивает в гнездо сектора 14 корпуса втулки скольжения 7 и держит сиденье кресла в этом положении с силой, пропорциональной сжатой пружине 20 и углу наклона стенок гнезда. Для перемещения сиденья кресла в другое положение необходимо приложить вращающий момент, достаточный для сжатия пружины 20 и вывода ролика 22 из гнезда. Необходимый вращающий момент возникает при движении коляски по лестничному маршу, т.к. сиденье кресла шарнирно закреплено на цапфах 15 корпусов втулок скольжения 7, то за счет веса инвалида примет горизонтальное положение. Во втором случае ролик 22 вводится в гнездо сектора 14 корпуса втулки скольжения 7 и жестко там фиксируется винтом-штоком 18 через пяту 21 и полностью сжатой пружиной 20. Для перевода сиденья кресла из одного положения в другое нужно предварительно вывести ролик 22 из гнезда, т. е. освободить пружину 20.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНВАЛИДНАЯ ШАГАЮЩАЯ КРЕСЛО-КОЛЯСКА | 2010 |
|
RU2434622C1 |
| КРЕСЛО-КОЛЯСКА ДЛЯ ИНВАЛИДОВ И ПАНДУС ДЛЯ ПЕРЕМЕЩЕНИЯ КОЛЯСКИ ДЛЯ ИНВАЛИДОВ ПО ЛЕСТНИЧНЫМ МАРШАМ (ВАРИАНТЫ) | 2011 |
|
RU2478362C2 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| УНИВЕРСАЛЬНАЯ ИНВАЛИДНАЯ КОЛЯСКА С АВТОМАТИЗИРОВАННОЙ ЭЛЕКТРОГИДРАВЛИЧЕСКОЙ СИСТЕМОЙ | 2012 |
|
RU2519941C2 |
| ИНВАЛИДНОЕ КРЕСЛО-КОЛЯСКА ДЛЯ ПОМЕЩЕНИЙ | 1991 |
|
RU2038064C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ КРЕСЛО-КОЛЯСКА | 2015 |
|
RU2611875C1 |
| КОЛЯСКА ДЛЯ ИНВАЛИДОВ | 1990 |
|
RU2043097C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| Коляска с функцией подъёма по лестницам для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688289C1 |

Использование: в медицинской технике, в частности в инвалидных колясках, обеспечивающих самостоятельное передвижение как по ровной или наклонной поверхности, так и по лестничным маршам. Сущность изобретения: коляска содержит раму 1, с которой шарнирно связаны полозовидные опоры 2 с возможностью поворота в продольных вертикальных плоскостях. Передние концы соединены с рамой пружинами сжатия 3 и фиксируются в нерабочем поднятом положении. Коляска имеет передние 4 и задние 5 ходовые колеса, беговая часть которых выполнена с протектором. Сиденье кресла 6 коляски шарнирно связано с рамой с возможностью постоянного поддержания его в горизонтальном положении и продольного перемещения по продольным элементам рамы 1 в требуемое положение посредством втулок скольжения 7. 10 ил.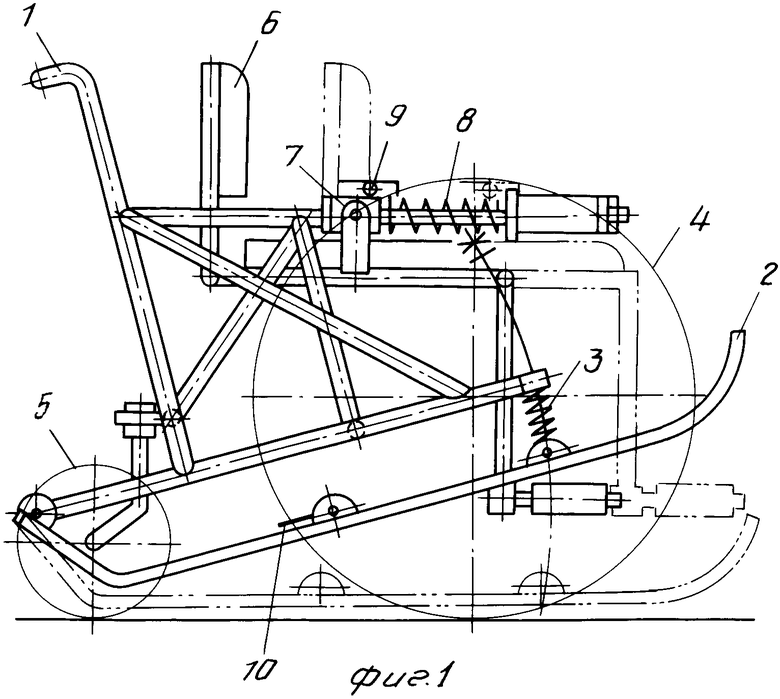
КОЛЯСКА, содержащая раму, установленное на ней с возможностью поворота в продольной вертикальной плоскости сиденье, передние и задние ходовые колеса, беговая часть которых выполнена с протектором, и связанные с рамой с возможностью подъема и опускания в продольных вертикальных плоскостях полозовидные опоры, отличающаяся тем, что задние части полозовидных опор связаны с рамой шарнирно, передние их концы шарнирно соединены с рамой посредством пружин сжатия с возможностью фиксации опор в их поднятом нерабочем положении, при этом сиденье связано с рамой посредством размещенных на продольных элементах последней втулок скольжения с возможностью продольного перемещения сиденья и фиксации его в требуемом положении, а коляска снабжена размещенным в ее нижней части с возможностью взаимодействия с опорной поверхностью лестничного марша упором для самоторможения коляски.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4222449, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
