Изобретение относится к области безрельсового транспорта, конкретно к самоходным креслам и креслам-коляскам для инвалидов.
Близкими аналогами устройства являются самоходные кресла для инвалидов, которые содержат раму с установленными на ней креслом и самоходным шасси с ошиненными ходовыми колесами, рычажный узел, установленный на раме с возможностью поворота вокруг оси, параллельной осям ходовых колес, и фиксации в двух различных положениях, гусеничные движители в качестве устройства для преодоления лестничных маршей и отдельных препятствий, смонтированные на подвижных концах рычажного блока, привод поворота рычажного узла и привод, обеспечивающий возможность изменения скорости и направления вращения левых и правых ведущих колес или (на выбор) ведущих звездочек гусеничных движителей (пат. США N 4654080, кл. В 62 D 55/04, публ. 1986, N 4687068, кл. В 62 D 55/04, публ. 1987).
Наличие дополнительных гусеничных движителей, тем более используемых эпизодически, существенно ухудшает массовые и габаритные показатели. Усложнена трансмиссия, обеспечивающая попеременную работу двух разнотипных движителей, особенно с подвижным друг относительно друга осями ведущих колес и звездочек. Продольные габариты гусеничных движителей, определяемые продольной опорной базой, необходимой для движения по лестничным маршам, постоянны и превышают продольную базу колесной ходовой части. Это уменьшает преимущества шасси с бортовыми способом поворота. Традиционная для гусеничных движителей вероятность сброса гусениц при повороте на неровной поверхности. На гусеничном ходу наблюдается повышенное сопротивление повороту и соответственно повышенные энергозатраты. Устройство недостаточно рационально с позиций ремотопригодности (широкая номенклатура составных частей и узкие возможности их взаимозаменяемости).
Наибольший интерес, в сравнении с заявляемым устройством, представляет инвалидное кресло-коляска, содержащее раму с установленными на ней креслом и передним колесным узлом в виде расположенных слева и справа от рамы крестовин с шарнирно смонтированными на концах каждой из них тремя ошиненными колесами, рычажный узел, прикрепленный к раме вертикально с возможностью подъема и опускания путем поворота вокруг оси, параллельной осям вращения крестовин, задний колесный узел, аналогичный переднему, но с роликами меньшего диаметра, установленный на рычажном узле, дополнительные два задних ошиненных колеса, аналогичных колесам переднего колесного узла и установленных также на концах рычажного узла с возможностью поворота налево и направо, ручной привод с червячным редуктором и цепной передачей, обеспечивающей возможность изменения скорости и направления вращения левых и правых крестовин в отдельности, ручной привод с цепной передачей, обеспечивающий возможность изменения скорости и направления вращения левых и правых колес в отдельности независимо от вращения крестовин, и ручной привод поворота рычажного узла, включающий в себя самотормозящую червячную передачу. Одно из трех колес (опорное) на каждой передней крестовине и дополнительные передние колеса на ровной поверхности расположены на одинаковом уровне. Задние крестовины с роликами вывешены и вступают в работу только при поднятом (повернутом назад) рычажном узле (а. с. СССР N 343893, кл. В 62 В 5/02, A 61 G 5/02, 1969).
К недостаткам данного аналога относятся: трудоемкость передвижения и управления, связанная с отсутствием электромеханических приводов; повышенные габаритно-массовые характеристики, связанные с наличием двух независимых приводов вращения крестовин и колес, наличием дополнительных колес и вывешенных (не используемых при эксплуатации на ровной местности) заднего колесного узла и четырех больших по диаметру передних колес; вращение четырех передних колес в указанном режиме вхолостую; невозможность использования заднего колесного узла при вертикальном положении рычажного узла и соответственно при минимальной колесной базе; недостаточно высокое сцепление колес со ступенями на лестничных маршах; необходимость перехода на режим шагания при небольших высотах препятствий, что вызывает неудобство и нервозность оператора при движении по пересеченной местности (раздолбанные тротуары, например); невозможность самостоятельного поворота с нулевым радиусом.
Наиболее близким к заявляемому техническим решением является самоходное кресло для инвалидов, содержащее раму с установленными на ней креслом и передним колесным узлом в виде расположенных слева и справа от рамы ступиц с упругими опорными элементами, шарнирно смонтированными на их периферии на одинаковом расстоянии друг от друга, рычажный узел с задним колесным узлом, аналогичным переднему, прикрепленный к раме с возможностью подъема и опускания путем поворота вокруг оси, параллельной осям ступиц, и фиксации в различных положениях, привод поворота рычажного узла и электромеханический привод с бортовыми цепными передачами, обеспечивающий возможность изменения скорости и направления вращениях левых и правых ступиц в отдельности (прототип).
Опорные упругие элементы выполнены в виде трех одинаковых колес с упругими сплошными шинами, оси которых расположены параллельно осям вращения ступиц и которые связаны механическими (зубчатыми) передачами с приводом вращения ступиц и со ступицами через механизмы блокировки рычажный узел может занимать множество фиксированных положений, при этом в крайнем своем опущенном положении наклонен к горизонтальной плоскости под углом α< 40о. Ступицы каждого борта связаны с электромеханическим приводом цепными передачами, ведущие звездочки которых разнесены в пространстве и связаны каждая со своим червячным редуктором.
Однако такое самоходное кресло обладает недостаточно высокими технико-эксплуатационными характеристиками. Конструкция его ходовой части сложна в производстве, обслуживании и ремонте, имеет высокую стоимость, что не соответствует ограниченным возможностям большинства инвалидов. Конструкция колесных узлов и пологая ориентация рычажного узла в сочетании с его значительной длиной (что необходимо для движения по ступеням и повышения профильной проходимости в целом) обусловливает габаритно-массовые показатели самоходного кресла, плохо удовлетворяющие ограниченным среднестатическим условиям их эксплуатации: постоянно вынесенный за пределы рамы с креслом задний колесный узел препятствует маневрированию в малогабаритных квартирах, комнатах и кухнях коммунальных квартир, на узких лестничных маршах и лестничных площадках. Из-за повышенного сопротивления повороту бортовым способом, связанного с большими расстояниями между ступицами борта (продольной колесной базой) и между колесами в пределах каждой ступицы, а также наличием эластичных шин, недостаточно полно реализуются преимущества колесной ходовой части с бортовым способом поворота, сокращен энергоресурс без подзарядки аккумулятора. Холостое вращение вывешенных колес на периферии ступиц при эксплуатации в колесном режиме также снижает КПД и энергоресурс, снижает безопасность работы. Хорошо зарекомендовавшая себя на транспортных средствах-вездеходах при движении по слабым грунтам, по бездорожью, такая ходовая часть недостаточно эффективна при преодолении лестничных маршей с числом ступеней свыше трех в связи с относительно небольшим диапазоном изменения угла наклона рычажного узла, недостаточно высоким и надежным сцеплением ошиненных, традиционно ориентированных колес со ступенями, неустойчивостью движения, тряской и кренами при сходе колеса со ступени. Таким образом, в отличие от применения на мощных транспортных средствах высокой проходимости, известная ходовая часть порождает спектр существенных недостатков при его использовании на другом объекте в конструкции самоходного инвалидного кресла.
Цель изобретения улучшение технико-эксплуатационных характеристик самоходного кресла для инвалидов путем упрощения устройства, улучшения габаритно-массовых показателей, повышения проходимости, маневренности, экономичности, надежности и безопасности.
Указанная цель достигается тем, что в самоходном кресле для инвалидов опорные упругие элементы выполнены в виде множества роликов, оси вращения которых, независимого от вращения ступицы, расположены тангенциально под углом γ к плоскости вращения ступицы таким образом, что след в виде наклонных линий, оставляемых на дороге роликами заднего колесного узла, пересекает линии от роликов переднего колесного узла. Величина угла γ меньше арктангенса отношения поперечной колесной базы к продольной колесной базе в крайнем опущенном положении рычажного узла. Последний в указанном положении наклонен к горизонтальной плоскости под углом α= (90±15)о. Обе ведущие звездочки цепной передачи к передней и задней ступицам установлены соосно рычажному узлу.
Цель достигается также введением независимых друг от друга дополнительных признаков устройства: угол γ наклона осей упругих роликов к плоскости вращения ступицы составляет 5-8о. Привод поворота рычажного узла выполнен в виде самотормозящейся червячной передачи со звездочкой, направляющих роликов и цепи, охватывающей звездочку с направляющими роликами и соединенной своими концами с рычажным узлом с передней и задней сторон на удалении от оси его поворота. В приводе ступиц предусмотрены сцепные муфты, допускающие отключение ступиц по крайней мере от части привода.
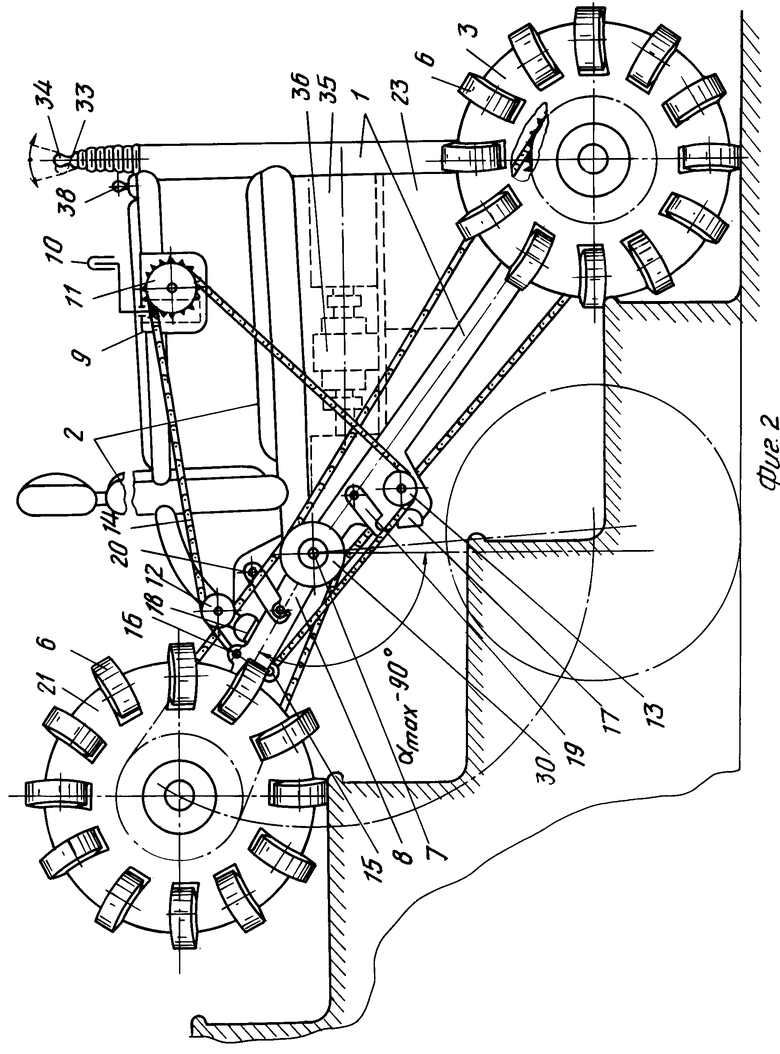
На фиг. 1 изображено самоходное кресло для инвалидов, вид сбоку, в положении эксплуатации на ровной поверхности; на фиг. 2 то же, на лестничном марше; на фиг. 3 кинематическая схема шасси самоходного кресла с электромеханическим приводом; на фиг. 4 то же, другой вариант выполнения.
Самоходное кресло для инвалидов содержит раму 1 с креслом 2. Элементы рамы и кресла (его основа) могут быть объединены. Спереди на раме 1 на подшипниках установлен передний колесный узел, основу которого составляют соосно расположенные по бокам рамы 1 (слева и справа) ступицы 3 и 4. На периферии ступицы на одинаковом расстоянии друг от друга выполнены полуцилиндрические выточки 5, оси которых расположены тангенциально под углом γ к плоскости вращения ступицы, ниже наружного диаметра ступицы. Выточки 5 (преимущественно по 12-16 штук на каждую ступицу) ступицы 4 ориентированы симметрично выточкам 5 ступицы 3. В каждой выточке 5 смонтирован ролик 6, установленный соосно выточке 5 с возможностью свободного вращения независимо от вpащения ступицы. Ролик 6 выполнен предпочтительно из упругого износостойкого материала, в частности резины. Сзади на раме 1 на подшипниках с поперечной горизонтальной осью 7 (т.е. параллельной осям ступиц 3 и 4) установлен рычажный узел 8 в виде Н-образной полурамы с возможностью подъема и опускания путем поворота вокруг оси 7 в диапазоне углов αmax α min относительно горизонтальной плоскости и фиксации в указанных крайних положениях и при других или при всех промежуточных значениях α (дополнительные фиксированные положения рычажного узла 8). В данном примере возможность поворота и автоматической и/или дополнительной ручной фиксации рычажного узла 8 обеспечена наличием привода его поворота в виде самотормозящейся червячной передачи 9 с рукояткой 10, звездочкой 11, направляющих роликов 12 и 13 и цепи 14 (велосипедной или мотоциклетной), охватывающей звездочку 11 и ролики 12 и 13 и соединенной своими концами с передней 15 и задней 16 проушинами на удалении от оси 7. Ролики 12 и 13, проушины 15 и 16 и посадочные места передачи 9 с рукояткой 10 предусмотрены с обеих сторон рамы 1 и узла 8 (т.е. по обоим бортам самоходного кресла). Привод поворота узла 8 расположен с любой стороны рамы 1, в зависимости от физиологических возможностей или желании инвалида-оператора. В одном из крайних положений (нижнем) рычажный узел 8 наклонен к горизонтальной плоскости под углом α= (90±15)о (см. фиг. 1). Рациональное значение максимального угла поворота узла 8 αmax (205±5)о (фиг. 2). Устройство содержит упругие ограничители 17 и 18 поворота узла 8, дополнительные, нормально включенные фиксаторы 19 и 20, выключаемые вручную или дистанционно. На подвижных концах рычажного узла 8 на подшипниках установлен задний колесный узел, основу которого составляют соосно расположенные ступицы 21 и 22, диаметры которых равны диаметрам ступиц 3 и 4. На них смонтированы ролики 6 аналогично переднему колесному узлу. При этом расположение (ориентация) роликов 6 всех четырех колес самоходного кресла таково (фиг. 3, 4), что след в виде наклонных линий, оставляемых на дороге роликами 6 заднего колесного узла, пересекает линии от роликов 6 переднего колесного узла, а величина угла γ меньше арктангенса отношения поперечной колесной базы Вк к продольной колесной базе Lkmin (т.е. при αmin): γ < arctg (Bk/Lkmin).
Оптимальное эмпирическое значение γ= (5-8)о. Оптимальный диаметр колес 0,35 м (в соответствии с высотой стандартных ступеней лестничных пролетов). При αmin уровень расположения ступиц 3, 21, 4, 22 одинаков. На раме 1 установлен источник электрической энергии 23 (один или несколько аккумуляторов, например типа 6-СТ-55) и электромеханический привод, обеспечивающий возможность изменения скорости и направления вращения левых (4,22) и правых (3,21) ступиц в отдельности.
В первом варианте конкретного выполнения электромеханического привода колесных узлов (фиг. 3) предусмотрено два двигателя постоянного тока (по одному на бортовую трансмиссию) 24 и 25. Каждый двигатель расположен поперечно и через зубчатый цилиндрический редуктор 26, клиноременный редуктор 27 связан с поперечным валом 28, установленным в раме 1 соосно шарниру крепления рычажного узла 8 (ось 7). На внешнем конце вала 28 последовательно жестко установлены одинаковые ведущие цепные звездочки 29 и 30, связанные посредством приводных цепей (велосипедных) по отдельности с одинаковыми ведомыми звездочками 31 и 32, жестко установленными с тыльных сторон осей ступиц 3 и 4. Элементы 29-32 в совокупности образуют бортовую цепную передачу.
Органы управления двигателями 24 и 25 выполнены в виде трехпозиционных тумблеров ("вперед" "стоп", "назад") 33 и 34, расположенных на передних концах подлокотников кресла (на ручках).
Во втором варианте конкретного выполнения электромеханического привода колесных узлов (фиг. 4) двигатель 35 расположен продольно и связан с валом 28 через малогабаритную двухступенчатую планетарную коробку передач 36 и червячный редуктор 37. Система управления приводом дополнительно (в сравнении с предыдущим вариантом) содержит орган управления 38 электромагнитной муфтой коробки передач 36.
Целесообразно введение в привод еще одного элемента сцепной муфты 39 (электромагнитной или механической со слезковым механизмом выключения и рычажным приводом), допускающей отключение ступиц 3, 4, 21, 22 по крайней мере от части привода. В данном примере (фиг. 3) муфта 39 предусмотрена на валу 28 между элементами 27 и 29.
Привод обеспечивает скорость движения самоходного шасси, предпочтительно 4-6 км/ч; при батарее аккумуляторов 23 с энергоемкостью 2 х 75 А ˙ч пробег без подзарядки 20 км. Большинство элементов и узлов приводов устройства представляет собой покупные изделия, выпускавшиеся и выпускаемые отечественной промышленностью.
Варианты конкретного конструктивного выполнения заявляемого устройства не исчерпывают многообразия возможных вариантов в рамках совокупности заявляемых существенных признаков.
Устройство работает следующим образом.
При стоянке или движении на ровной поверхности задний колесный узел установлен в положении αmin с упором в ограничители 17 и зафиксирован посредством передачи 9 и/или дополнительных фиксаторов 19 и 20. Продольная колесная база Lk при этом минимальна. Минимальна, соответственно, общая длина самоходного кресла. Посредством органов управления электромеханического привода (33, 34 и 38) измеряют режимы работы двигателей 24 и 25 и коробки передач 36. В соответствии с этим самоходное кресло перемещается вперед, назад и поворачивает с радиусом R≥0 бортовым способом. На твердой ровной поверхности, за счет многочисленности роликов 6, их упругости (деформируемости), неодинаковой ориентации на разных колесах и наклона γ обеспечивается достаточно высокая плавность хода самоходного кресла. Кроме того, свободно вращающиеся ролики 6 уменьшают сопротивление повороту, особенно повороту на месте. При движении по косогору наклон γ роликов 6 препятствует боковому уводу самоходного кресла под косорог вследствие качения роликов 6. На деформируемом грунте ролики работают как грунтозацепы, повышая проходимость самоходного кресла, а их наклон γ увеличивает эффективность и экономичность поворота.
Для преодоления отдельных препятствий рычажный узел 8 устанавливают на больший угол α в целях повышения устойчивости самоходного шасси в кресле. Таким же образом изменяют угол наклона кресла на ровной местности для улучшения комфортности отдыха оператора. Для этого выключают фиксаторы (19, 20 и др. ), вращением рукоятки 10 перемещают цепь 14, последняя поворачивает узел 8 за проушину 16 относительно оси 7. При достижении желаемого значения узел 8 фиксируется автоматически самотормозящейся червячной передачей 9, а в случае наличия других фиксаторов, допускающих фиксацию узла 8 при любом значении α их включают. Самоходное кресло преодолевает препятствие типа отдельной ступени или бордюрного камня, цепляясь за их ребро выдающимися частями роликов 6 сначала одним колесным узлом (или отдельным колесом), затем последующим колесным узлом (или отдельным колесом).
Движение вверх по лестничным маршам осуществляют задним ходом при αmax или близком αmax значении угла установки рычажного узла 8. Конкретный выбор α зависит от параметров лестничного марша (крутизны, соотношения высоты и ширины ступени) и связан с необходимостью сохранения исходного положения кресла в пространстве. При рекомендуемом соотношении геометрических параметров колесной ходовой части преодоление стандартного лестничного марша (высота ступени 0,15 м, ширина 0,3 м) с числом ступеней больше трех осуществляется при переменном значении α, при αmin < < α <αmax забираются задним колесным узлом на третью ступень и в случае его неустойчивого положения при одновременном упоре переднего колесного узла в первую ступень увеличивают α до значения α max. При начальной установке α αmax угол α оперативно уменьшают и затем вновь увеличивают посредством рукоятки 10 в зависимости от условий движения по лестничным маршам с промежуточными площадками и поворотами.
Движение по лестничным маршам вниз осуществляется аналогично, но передним ходом.
Перевод из режима эксплуатации "самоходное инвалидное кресло" в режим эксплуатации "инвалидная коляска" осуществляют выключением сцепной муфты 39. При отсутствии связи колесных узлов с большей частью их привода кресло перемещают в пассивном режиме. При этом сопротивление вращению колес незначительно.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНОЕ ИНВАЛИДНОЕ КРЕСЛО | 1996 |
|
RU2115401C1 |
| КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2042557C1 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ САМОХОДНОГО ИНВАЛИДНОГО КРЕСЛА ПО ЛЕСТНИЧНЫМ МАРШАМ | 1996 |
|
RU2116061C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА С ДИСФУНКЦИЕЙ НИЖНИХ КОНЕЧНОСТЕЙ В САМОХОДНОЙ КОЛЯСКЕ НА ЛЕСТНИЦЕ С ПОРУЧНЯМИ | 2010 |
|
RU2417787C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ПОДЪЕМА ПО ЛЕСТНИЧНЫМ МАРШАМ | 2001 |
|
RU2215510C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ДВИЖЕНИЯ, В ЧАСТНОСТИ, ПО ЛЕСТНИЦАМ | 2005 |
|
RU2312788C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2558338C1 |



Изобретение относится к области безрельсового транспорта. Самоходное кресло для инвалидов содержит раму с установленными на ней креслом и поворотным в продольной вертикальной плоскости рычажным узлом. В передней части рамы и на подвижных концах рычажного узла предусмотрены передний и задний колесные узлы в виде ступиц с равномерно распределенными по их периферии упругими роликами, оси свободного вращения которых расположены тангенциально под углом к плоскости вращения ступицы таким образом, что след в виде наклонных линий, оставляемых на дороге роликами заднего колесного узла, пересекает линии от роликов переднего колесного узла. Ступицы связаны с электромеханическим приводом, обеспечивающим возможность изменения скорости и направления их вращения независимо для левого и правого бортов. Привод включает в себя цепную передачу, обе ведущие звездочки которой установлены соосно рычажному узлу. Привод поворота рычажного узла выполнен в виде самотормозящейся червячной передачи со звездочкой, направляющих роликов и цепи, соединенной концами с рычажным узлом на удалении от поперечной горизонтальной оси. В электромеханическом приводе предусмотрены сцепные муфты, допускающие отключение ступиц по крайней мере от части привода. 3 з.п. ф-лы, 4 ил.
| Патент США N 4645222, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
