Изобретение относится к медицинской технике, касается безрельсового транспорта, конкретно транспортных средств для инвалидов.
Известно устройство инвалидная коляска Локсеева а.с. №2220696С2 для спуска и подъема по лестнице инвалида с ручным приводом. Коляска преодолевает любые ступеньки с общим уклоном до 30 градусов. Трансформация коляски из транспортного средства в состоянии для преодолевании ступени и обратно производится одним движением рычагов. Это достигается при помощи расположенных спереди и сзади двух пар крестообразных опор. «Кресты» работают с помощью цепной передачи при включенном тормозе. При спуске по лестничному маршу рабочими являются передние крестообразные опоры, при этом задние «кресты» выполняют роль антиопрокидывателя. При подъеме по лестничному маршу осуществляется вперед спиной, ведущие «кресты» задние, передние соответственно работают в качестве антиопрокидывателя. В обычном режиме передвижения крестообразные опоры находятся в приподнятом положении.
Однако это устройство имеет ряд недостатков. Оно приводится в движении физическим усилием инвалида - ручной привод, что иногда невозможно, или при помощи сопровождающего лица. Кроме того это устройство невозможно использовать при психической или физической несостоятельности инвалида. Его невозможно применить при больших до 1 метра естественных и искусственных препятствиях. Нестандартные лестничные марши, высокие бордюры и препятствия до 50 см. (грязь, гористая поверхность).
Существенным недостатком устройства при его применении является малая маневренность, невозможность применения в режиме автопилота, малое удобство и комфорт.
Задачей изобретения заключается в обеспечении возможности автоматизированной системы управления и автономным энергетическим питанием системы «гибрид» работающего на спирту направленного перемещения универсальной инвалидной коляски с автоматизированной электрогидравлической системой с инвалидом на необходимое расстояние и направление в режиме автопилота под контролем самого инвалида. Также возможно управление УИКАЭС с инвалидом, сопровождающим лицом с любого расстояния, это облегчет жизнь инвалида и общества, уменьшит время и средства на обслуживание инвалида и увеличивающихся его потребностей. Указанная задача решается с помощью предлагаемой нами универсальной инвалидной коляски с автоматизированной электрогидравлической системой, которая сможет перемещать инвалида в необходимом направлении, невзирая на искусственные и естественные препятствия в режиме автопилота быстро и точно с применением навигационной системы «глонасс» и компьютерной программы.
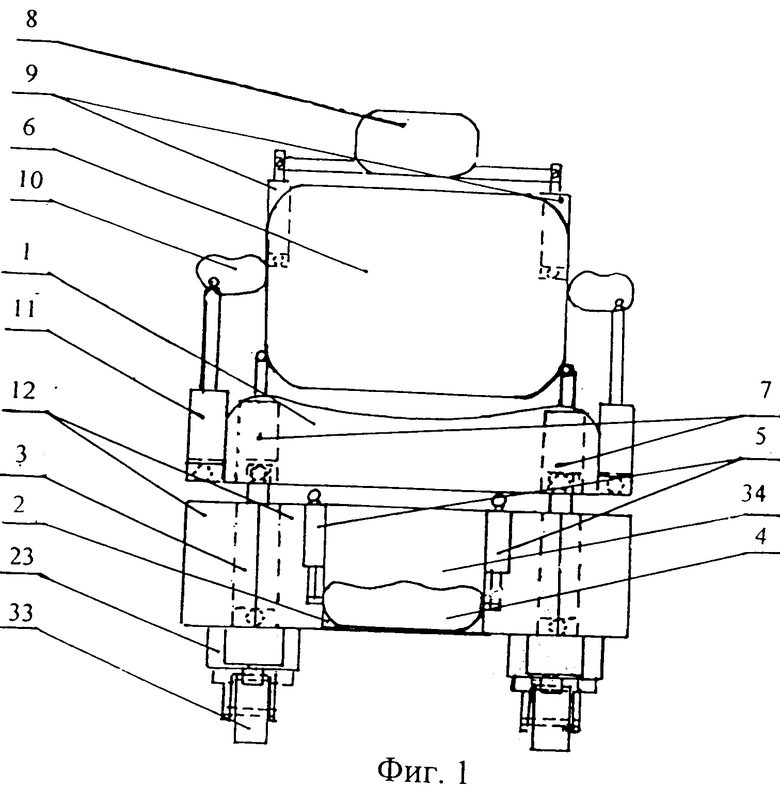
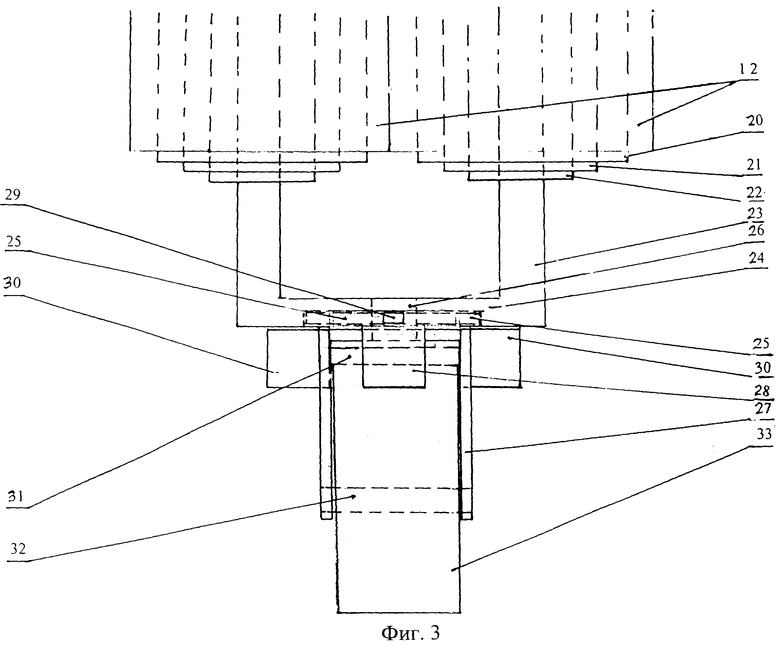
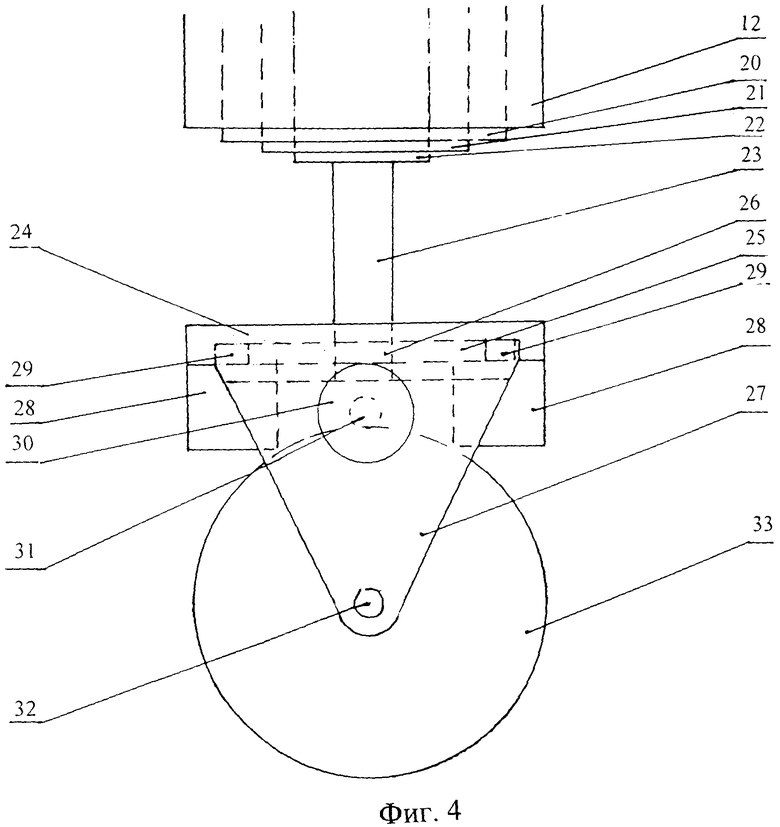
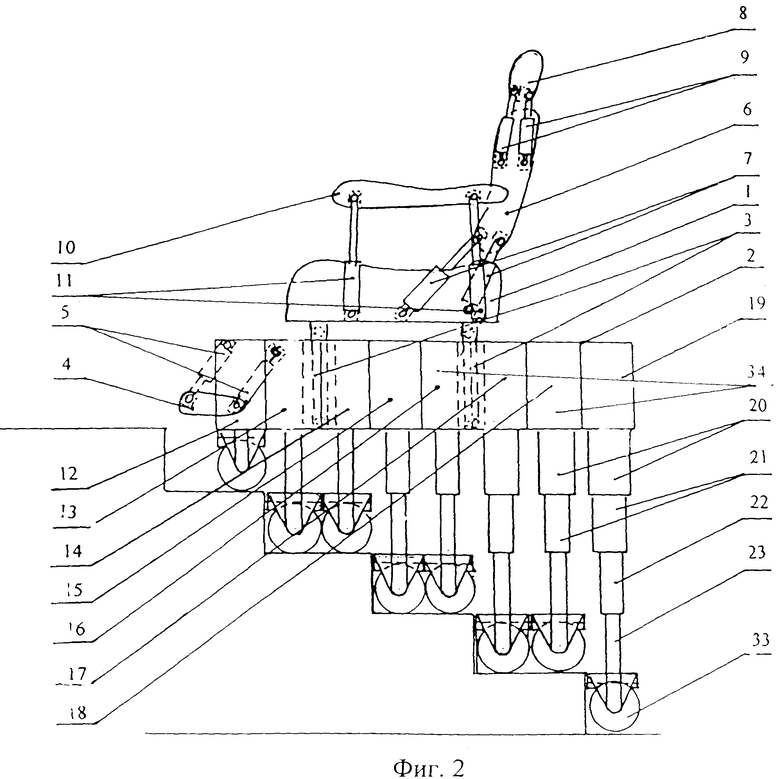
На фиг.1 изображена схема универсальной инвалидной коляски автоматизированной электрогидравлической системой (УИКАЭС) спереди, на фиг.2 изображена (УИКАЭС) сбоку принцип движения ее по лестничному маршу вверх, на фиг.3, 4 изображена колесо обеспечивающее движение (УИКАЭС) фас и профиль.
Универсальная инвалидная коляска с автоматизированной электрогидравлической системой. Состоит из регулируемого сидения 1, которое подвижно крепится к корпусу 2, четырьмя гидроцилиндрами 3, к регулируемому сиденью 1 подвижно крепится регулируемая подножка 4 четырьмя гидроцилиндрами 5, к нему же, подвижно крепится регулируемая спинка 6 четырьмя гидроцилиндрами 7, к регулируемой спинке 6 подвижно крепится регулируемый подголовник 8 четырьмя гидроцилиндрами 9, а к регулируемому сиденью 1 кресла подвижно крепятся подлокотники 10 четырьмя гидроцилиндрами 11, к корпусу 2 неподвижно крепятся по восемь пар телескопических гидроцилиндров 12, 13, 14, 15, 16, 17, 18, 19 с каждой стороны, в которых имеются штоки-цилиндры 20, 21, 22 и шток 23, к которому неподвижно крепится основание 24, к которому неподвижно крепится шестерня поворота 25, также к основанию 24 неподвижно крепится ось поворота 26, на которой подвижно крепится вилка 27, к которой крепятся неподвижно статоры двух электродвигателей поворота 28 на роторе которых неподвижно крепятся ведущие шестерни поворота 29, к вилке 27 неподвижно крепятся статоры двух ведущих электродвигателей 30, на роторе которых крепится ведущая шестерня 31, к вилке 27 подвижно крепится ось вращения 32, на которую подвижно крепится колесо 33 энергетическая установка работающая на спирту, системы «гибрид» 34.
Универсальная инвалидная коляска с электрогидравлическим приводом. Используется следующим образом: в первую очередь необходимо привести универсальную инвалидную коляску с электрогидравлическим приводом для приема конкретного инвалида по его состоянию в данное время. Для этого чтобы изменить положение сидения 1 под данного инвалида компьютерная программа включает в работу четыре гидроцилиндра 3. Для индивидуальной регулировки подножки 4, компьютерная программа включает в работу четыре гидроцилиндра 5. Для индивидуальной регулировки спинки 6 компьютерная программа включает в работу четыре гидроцилиндра 7. Для индивидуальной регулировки подголовника 8 компьютерная программа включает в работу четыре гидроцилиндра 9. Для индивидуальной регулировки подлокотников 10 компьютерная программа включает в работу четыре гидроцилиндра 11. Под контролем инвалида или сопровождающего лица.
Усаживают инвалида на универсальную инвалидную коляску с электрогидравлическим приводом и снова компьютерная программа регулирует кресло под данного инвалида для удобства. Под контролем инвалида или сопровождающего лица.
Если необходимо движение универсальной инвалидной коляски с электрогидравлическим приводом вперед или назад, то компьютерная программа включает в работу тридцать два ведущих электродвигателя 30 на восьми парах телескопических гидроцилиндров 12, 13, 14, 15, 16, 17, 18, 19 с каждой стороны под контролем инвалида или сопровождающего лица.
Если необходимо движение универсальной инвалидной коляски с электрогидравлическим приводом вправо или влево, то компьютерная
программа включает в работу тридцать два электродвигателя поворота 28, которые поворачивают колеса 33 на определенную величину на восьми парах телескопических гидроцилиндров 12, 13, 14, 15, 16, 17, 18, 19 с каждой стороны под контролем инвалида или сопровождающего лица. (Фиг 3, 4).
При движении универсальной инвалидной коляски с электрогидравлическим приводом по бетонному лестничному маршу или другим препятствиям происходит следующим образом: при возникновении препятствия перед колесами 33 первой пары гидроцилиндров 12 происходит компьютерная программа включает подъем всей универсальной инвалидной коляски с электрогидравлическим приводом на парах гидроцилиндров 13, 14, 15, 16, 17, 18, 19 с блокированной первой парой гидроцилиндров 12 и их колес 33 до уровня первой ступеньки. Затем происходит движение вперед, когда возникает препятствие колесам 33 второй пары гидроцилиндров 13 первой ступеньки, происходит подъем колес 33 второй пары гидроцилиндров 13 до уровня первой ступеньки. Затем происходит движение вперед и когда возникает препятствие перед колесами 33 первой пары гидроцилиндров 12 второй ступеньки и третьей пары гидроцилиндров 14 и их колес 33 первой ступеньки происходит подъем универсальной инвалидной коляски с электрогидравлическим приводом на парах гидроцилиндров 13, 15, 16, 17, 18, 19 с блокированной первой парой гидроцилиндров 12 и их колес 33 до уровня второй ступеньки и третьей пары гидроцилиндров 14 и их колес 33 до уровня первой ступеньки. Затем снова движение вперед, и когда возникает препятствие перед колесами 33 второй пары гидроцилиндров 13 второй ступеньки, а первой ступеньки перед четвертой парой гидроцилиндров 15 и их колес 33 происходит подъем вверх колес 33 на парах гидроцилиндров 13 до уровня второй ступеньки и подъем колес 33 четвертой пары гидроцилиндров 15 до уровня первой ступеньки, снова движение вперед. Возникшее препятствие третьей ступени колесам 33 первой пары гидроцилиндров 12 второй ступени колесам 33 третьей пары гидроцилиндров 14 и первой ступеньки колесам 33 пятой пары гидроцилиндров 16 происходит подъем универсальной инвалидной коляски с электрогидравлическим приводом вверх на парах гидроцилиндров 13, 15, 17, 18, 19 с блокированными парами гидроцилиндров 12 и их колес 33 до уровня третьей ступеньки, парами гидроцилиндров 14 и их колес 33 до уровня второй ступеньки, парами гидроцилиндров 16 и их колес 33 до уровня первой ступеньки. Продолжается движение вперед, возникает препятствие перед колесами 33 второй пары гидроцилиндров 13 третьей ступеньки, четвертой пары гидроцилиндров 15 и их колесам 33 второй ступеньки, шестой пары гидроцилиндров 17 и их колесам 33 первой ступеньки. Происходит поднятие колес 33 второй пары гидроцилиндров 13 и их колес 33 до уровня третьей ступеньки, поднятие колес 33 четвертой пары гидроцилиндров 15 до уровня второй ступеньки и поднятие колес 33 и шестой пары гидроцилиндров 17 до уровня первой ступеньки, движение вперед продолжается, когда возникает препятствие перед колесами 33 первой пары гидроцилиндров 12 четвертой ступеньки, колесам 33 третьей пары гидроцилиндров 14 третьей ступеньки, колесам 33 пятой пары гидроцилиндров 16 второй ступеньки и колесам 33 седьмой пары гидроцилиндров 18 первой ступеньки происходит подъем коляски вверх на парах гидроцилиндров 13,15,17и19 с блокированными первыми парами гидроцилиндров 12 и их колес 33 до уровня четвертой ступеньки, с блокированными третьими парами гидроцилиндров 14 и их колес 33 до уровня третьей ступеньки, с блокированными пятыми парами гидроцилиндров 16 и их колес 33 до уровня второй ступеньки и блокированными седьмыми парами гидроцилиндров 18 и их колес 33 до уровня первой ступеньки.
Движение вперед продолжается, возникает препятствие перед второй парой гидроцилиндров 13 и их колес 33 четвертой ступеньки, четвертой пары гидроцилиндров 15 и их колес 33 третьей ступеньки, шестой пары гидроцилиндров 17 и их колес 33 второй ступеньки и восьмой пары гидроцилиндров 19 и их колес 33 первой ступеньки происходит подъем колес 33 второй пары гидроцилиндров 13 до уровня четвертой ступеньки, четвертой пары гидроцилиндров 15 и их колес 33 до уровня третьей ступеньки, шестой пары гидроцилиндров 17 и их колес 33 до уровня второй ступеньки, восьмой пары гидроцилиндров 19 и их колес 33 до уровня первой ступеньки. (Фиг.2)
Таким образом, можно преодолеть любое препятствие на универсальной инвалидной коляске с электрогидравлическим приводом как передним ходом, так и задним под контролем инвалида или сопровождающего лица или по желанию инвалида возможно управление универсальной инвалидной коляской с электрогидравлическим приводом с применением компьютера с программным обеспечением и навигационной системы глонасс в режиме автопилота. Движение универсальной инвалидной коляски с автоматизированной системой неограниченно во времени и расстоянии, т.к. источником энергии является система «гибрид» с топливом - спирт. Еще одной положительной чертой является то, что это экологически чистый продукт и доступность топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированная система удаления зубов | 2015 |
|
RU2606271C2 |
| ИНВАЛИДНАЯ ШАГАЮЩАЯ КРЕСЛО-КОЛЯСКА | 2010 |
|
RU2434622C1 |
| Инвалидная коляска | 1981 |
|
SU1069810A1 |
| ИНВАЛИДНАЯ КОЛЯСКА | 1994 |
|
RU2076673C1 |
| КРЕСЛО-КОЛЯСКА ДЛЯ ИНВАЛИДОВ И ПАНДУС ДЛЯ ПЕРЕМЕЩЕНИЯ КОЛЯСКИ ДЛЯ ИНВАЛИДОВ ПО ЛЕСТНИЧНЫМ МАРШАМ (ВАРИАНТЫ) | 2011 |
|
RU2478362C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2558338C1 |
| Инвалидная коляска | 1989 |
|
SU1764649A1 |
| Коляска для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688288C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2410071C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ КРЕСЛО-КОЛЯСКА | 2015 |
|
RU2611875C1 |
Изобретение относится к транспортным средствам для инвалидов.
Универсальная инвалидная коляска с автоматизированной электрогидравлической системой, состоящая из регулируемого сидения, которое подвижно крепится к корпусу четырьмя гидроцилиндрами, к регулируемому сидению подвижно крепится регулируемая подножка четырьмя гидроцилиндрами, к нему же подвижно крепится регулируемая спинка четырьмя гидроцилиндрами, к регулируемой спинке подвижно крепится регулируемый подголовник четырьмя гидроцилиндрами, а к регулируемому сидению кресла подвижно крепятся подлокотники четырьмя гидроцилиндрами. К корпусу неподвижно крепятся по восемь пар телескопических гидроцилиндров с каждой стороны, в которых имеются штоки-цилиндры и штоки, к которым неподвижно крепится основание, к которому неподвижно крепится шестерня поворота. Так же к основанию неподвижно крепится ось поворота, на которой подвижно крепится вилка, к которой крепятся неподвижно статоры двух электродвигателей поворота, на роторе которых неподвижно крепятся ведущие шестерни поворота. К вилке неподвижно крепятся статоры двух ведущих электродвигателей, на роторе которых крепятся ведущие шестерни. К вилке подвижно крепится ось вращения, на которую подвижно крепится колесо. Электропитание осуществляется от энергетической установки системы «гибрид», работающей на спирту.
Изобретение позволяет перемещать инвалида на универсальной инвалидной коляске с автоматизированной электрогидравлической системой по лестничным пролетам в режиме автопилота под контролем самого инвалида, или при дистанционном управлении сопровождающим лицом. 4 ил.
Универсальная инвалидная коляска с автоматизированной электрогидравлической системой, которая состоит из регулируемого сидения, которое подвижно крепится к корпусу четырьмя гидроцилиндрами, к регулируемому сидению подвижно крепится регулируемая подножка четырьмя гидроцилиндрами, к нему же подвижно крепится регулируемая спинка четырьмя гидроцилиндрами, к регулируемой спинке подвижно крепится регулируемый подголовник четырьмя гидроцилиндрами, а к регулируемому сидению кресла подвижно крепятся подлокотники четырьмя гидроцилиндрами, к корпусу неподвижно крепятся по восемь пар телескопических гидроцилиндров с каждой стороны, в которых имеются штоки-цилиндры и штоки, к которым неподвижно крепится основание, к которому неподвижно крепится шестерня поворота, также к основанию неподвижно крепится ось поворота, на которой подвижно крепится вилка, к которой крепятся неподвижно статоры двух электродвигателей поворота на роторе которых неподвижно крепятся ведущие шестерни поворота, к вилке неподвижно крепятся статоры двух ведущих электродвигателей, на роторе которых крепятся ведущие шестерни, к вилке подвижно крепится ось вращения, на которую подвижно крепится колесо, энергетической установки, работающей на спирту, системы «гибрид».
| Коррекционное устройство к зубофрезерным станкам | 1954 |
|
SU105161A2 |
| ИНВАЛИДНАЯ КОЛЯСКА С УСТАНОВКОЙ СИДЕНЬЯ ПО ВЕРТИКАЛИ | 2006 |
|
RU2387435C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
| УСТРОЙСТВО ДЛЯ ЗАКРУЧИВАНИЯ И ИЗМЕНЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ ПОТОКОВ ЖИДКОСТЕЙ И ГАЗОВ | 2010 |
|
RU2457013C2 |

