Изобретение относится к колесно-гусеничным малоразмерным транспортным средствам индивидуального пользования и реабилитационной технике, конкретно к средствам перемещения инвалида или иного лица с ограниченными физическими возможностями в нескольких режимах: самоходного инвалидного кресла-коляски; скутера (на малой или большой скоростях в общем диапазоне от 0 до минимум 20 км/ч); мобильного лестничного подъемника (преодоления профильных препятствий).
Известен ряд малогабаритных транспортных средств для инвалидов (кресел-колясок) с ручным управлением, приспособленных для самостоятельного перемещения по лестницам и преодоления др. профильных препятствий (например, поребриков, бордюрных камней), содержащих кресло, верхнюю и нижнюю полурамы, на одной из которых установлены пара ведущих и пара ведомых колес, а на другой - гусеничный движитель, а также устройство выборочного введения во взаимодействие с опорной поверхностью либо колесного, либо гусеничного движителя, устройство управления другими органами [CN 2139437 Y, A61G 5/06, 1992 г.; RU 103731 U1, A61G 5/06, 27.04.2010].
В них ведомые колеса выполнены полноповоротными («рояльными»), устройство выборочного введения во взаимодействие с опорной поверхностью колесного или гусеничного движителя выполнено в виде шарнирного соединения (шарнир с поперечной осью) полурам и специализированного привода взаимного силового поворота этих полурам, а в положении транспортного средства на колесном ходу нижняя и задняя ветви гусениц имеют наклон назад-вверх в продольной вертикальной плоскости (острый угол наклона, причем для нижней ветви согласно иллюстрациям не более 5-8 градусов, а задней ветви - не более 45 градусов).
Это ограниченно-универсальные кресла-коляски с комбинированным колесно-гусеничным движителем, где возможность движения вверх и вниз по лестницам на гусеничном ходу есть достаточно надежный способ самостоятельного, достаточно безопасного преодоления этого важнейшего профильного препятствия.
Несмотря на наличие определенных прогрессивных технических решений, этим устройствам все еще свойственны недостатки. Среди них существенное значение имеет не столько ручной принцип ее приведения в движение и управления, сколько свойственная для кресел-колясок тихоходность (1-6 км/ч) особенно при исключительно ручном управлении, что делает их непригодными для перемещения в скоростном («скутерном») режиме на относительно большие расстояния.
Упомянутый же скоростной (скутерный) режим воплощен в особом подклассе малогабаритных машин для лиц указанных категорий с ограниченной подвижностью - «скутеров» или «электроскутеров», характерные конструктивные особенности которых - это высокоскоростной электропривод (до 12-20 км/ч), переднее колесо, управляемое посредством Т-образной рулевой колонки с рулем мотоциклетного типа, и относительная длиннобазовость (в обеспечение динамической устойчивости на указанном скоростном режиме движения на горизонтальной или наклонной плоскости [Ресурс Интернет: http://www.ampgirl.su/2010/12/11/elektricheskie-kreslo-kolyaski-dlya-invalidov/: Электрическая кресло-коляска «Путешественник» МТ-090]).
Недостатком скутеров является невозможность их использования в низкоскоростном режиме в условиях малогабаритного помещения.
Наиболее близким к заявляемому изобретению по назначению и совокупности конструктивных признаков (прототипом) является колесно-гусеничное транспортное средство для инвалида (кресло-коляска), содержащее раму, кресло, колесный движитель с передним колесом и парой задних колес, гусеничный движитель в составе гусеничной тележки с ведущими звездочками, направляющими элементами и парой гусениц с изломом перехода их нижней ветви в заднюю, а также реверсивные приводы колесного и гусеничного движителей, в том числе электрический, источник автономного электропитания, тормоза и систему управления режимами движения, включающую устройство поворота переднего колеса и устройство выборочного ввода одного из указанных движителей во взаимодействие с опорной поверхностью [SU 1676621 A1, A61G 5/02, 5/04, 15.09.1991].
В нем задние колеса выполнены ведущими (выборочно от электромеханического или ручного привода); переднее колесо - ведомым управляемым; устройство поворота переднего колеса - в виде поворотного Г-образного рычага, с кнопками включения сигнализации и освещения (диапазон углов поворота не оговорен); рама состоит из двух подвижно взаимосвязанных полурам - «каркаса» и упомянутой тележки (в первоисточнике - «параллелограммной подвески гусеничной ходовой части», несущей для гусеничного движителя); гусеница опирается на опорные катки, установленные на полураме посредством кронштейнов; устройство регулирования угла продольного наклона кресла относительно рамы (в первоисточнике - «каркаса») и, соответственно, горизонтальной поверхности выполнено в виде рычажно-тросового устройства с ручным управлением; а устройство оперативного изменения угла продольного наклона кресла относительно рамы - в виде тросового подвеса к откидным стойкам с возможностью автоматической компенсации наклона рамы). Смену гусеничного хода на колесный и наоборот осуществляют принудительным смещением в вертикальном направлении тележки («параллелограммной подвески») относительно полурамы-«каркаса», то есть, по существу - взаимным смещением полурам, причем ручным способом. В положении транспортного средства на колесах (на колесном ходу) нижние ветви гусениц горизонтальны, а задние наклонены (начиная с места упомянутого излома).
Однако устройству свойственны следующие недостатки.
Во-первых (главный недостаток), уровень универсальности кресла-коляски недостаточно высок: при возможности движения на колесном и на гусеничном ходу вне лестниц и на гусеничном ходу по лестнице как на электромеханическом приводе, так и на ручном, невозможен скоростной, с максимальной скоростью 20±8 км/ч режим движения вне лестниц.
Во-вторых, смена режима движения на колесном ходу на режим движения на гусеничном ходу и наоборот возможны только посредством ручного механизма (вручную), что приемлемо далеко не для всякого пользователя (особенно инвалида с нарушением двигательного аппарата).
В-третьих, горизонтальность нижних ветвей гусениц в нерабочем положении гусеничного движителя не только затрудняет преодоление лестничных маршей на переходных участках (особенно при восхождении на первые ступени, до регулярного режима движения), но и требует наличия устройства оперативного изменения угла наклона кресла относительно рамы в компенсацию существенного углового изменения положения рамы на гусеничном ходу на лестничном марше (на стандартной лестнице обычно 30° в продольной вертикальной плоскости).
В-четвертых, гусеничный движитель чрезмерно громоздок и тяжел для индивидуальных транспортных средств такого класса (прежде всего, в связи с наличием опорных катков на кронштейнах).
В-пятых, реализуемый в устройстве способ разворота на лестничных межпролетных площадках на гусеницах бортовым силовым способом (отключением и торможением гусеницы отстающего борта) энергетически невыгоден как сокращающий и без того небольшую энергоемкость автономного источника питания - аккумуляторной батареи, да и далеко не всегда возможен по причине малой площади для разворота.
Таким образом, по совокупности своих характеристик устройство-прототип при всех своих положительных свойствах характеризуется недостаточно широкой универсальностью (отсутствием скоростного режима), относительно низкой маневренностью на колесном ходу, ручным механизмом смены режимов «колесный/гусеничный ход» и резервами улучшения массогабаритных показателей и энергетической экономичности.
Задачей, на решение которой направлено заявляемое изобретение, является расширение технико-эксплуатационных возможностей транспортного средства за счет обеспечения дополнительной функции скоростного движения и перевода устройства смены режимов «колесный ход/гусеничный ход» с ручного на электромеханический, обеспечения сверхманевренности, выражающейся в уменьшении возможных радиусов кинематического поворота на колесном ходу до нулевого включительно (на месте), поступательного движения в любом направлении с места, а также улучшения массогабаритных и экономических (по энергозатратам) показателей, причем при сохранении способности преодоления на гусеничном ходу лестниц и других выраженных профильных препятствий.
Решение поставленной задачи достигается тем, что в колесно-гусеничном транспортном средстве для инвалида, содержащем раму, кресло, колесный движитель с передним колесом и парой задних колес, гусеничный движитель в составе гусеничной тележки с ведущими звездочками, направляющими элементами и парой гусениц с изломом перехода их нижней ветви в заднюю, а также реверсивные приводы колесного и гусеничного движителей, в том числе электрический, источник автономного электропитания, тормоза и систему управления режимами движения, включающую устройство поворота переднего колеса и устройство выборочного ввода одного из указанных движителей во взаимодействие с опорной поверхностью, гусеничная тележка совмещена с рамой, устройство выборочного ввода одного из указанных движителей во взаимодействие с опорной поверхностью выполнено в виде рычажной подвески задних колес с приводами поворота рычагов подвески в вертикальных плоскостях с возможностью наклона нижних ветвей гусениц назад-вверх в положении транспортного средства на колесном ходу, переднее колесо выполнено в виде мотор-колеса с возможностью движения транспортного средства в скоростном диапазоне, а устройство его поворота - в виде рулевой колонки с возможностью поворота переднего колеса в диапазоне углов ±90°, кроме того, предусмотрено устройство независимого поворота задних колес, по меньшей мере, левого налево, а правого направо в диапазоне углов от 0 до величины, обеспечивающей кинематический поворот транспортного средства с нулевым радиусом.
Решение поставленной задачи достигается также за счет дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков):
- рулевая колонка может быть выполнена с изменяемым углом продольного ее наклона (это в наибольшей степени соответствует эргономическим требованиям к трансформируемым скутерам с двумя выраженными скоростными диапазонами и особенностями посадки-высадки);
- руль может быть выполнен T-образным (это также в наибольшей степени соответствует эргономическим требованиям для реализации скоростного режима транспортного средства);
- угол наклона нижней ветви гусениц в продольной вертикальной плоскости в положении транспортного средства на колесном ходу может составлять 30°, а задней ветви - 68° (это существенно облегчает преодоление стандартных и других лестничных маршей на переходных участках, особенно при заезде на первые ступени, до регулярного режима движения, позволяет сохранить практически неизменным угол наклона кресла относительно рамы за счет исключения наклона тележек гусеничного движителя, а значит рамы, на указанный угол 30°);
- при предыдущей совокупности признаков привод поворота рычага подвески каждого заднего колеса может быть выполнен на базе, по крайней мере, одного линейного электромеханического привода (актуатора), корпус которого установлен на раме или кресле, а шток соединен с рычагом подвески заднего колеса (это в наибольшей степени обеспечивает высокую компактность шасси, особенно при креплении приводов-актуаторов к креслу или к раме непосредственно сбоку - под сиденьем, унификацию приводных агрегатов и адаптацию к электромеханическому бортовому комплексу транспортного средства в целом);
- при основной или предыдущей совокупности признаков транспортного средства в нем может быть предусмотрена регулируемая по длине перемычка-тяга, соединяющая подвижный элемент привода поворота рычага подвески заднего колеса, в частности конец штока привода (актуатора), с указанным рычагом (это наиболее доступный, без изменения конструкции покупных изделий, путь решения задачи предварительной регулировки «под конкретного пользователя»; он дает дополнительные преимущества по массогабаритным показателям плюс позволяет опереться в конструировании на достаточно «отлаженную» в области гусеничных машин схему балансирной подвески опорных катков, а в колесно-шагающих шасси - схему рычажной подвески колес; выгодно отличает такое устройство регулирования угла продольного наклона кресла относительно горизонтальной плоскости в компенсацию наклона рамы на лестничных маршах от других возможных вариантов устройства своей простотой и безотказностью);
- привод поворота рычага подвески каждого заднего колеса может быть дополнительно снабжен как минимум одной возвратной пружиной, сжимаемой при движении штока привода-актуатора в одну сторону и работающей самостоятельно или в параллель с приводом-актуатором при движении его штока в другую сторону (это улучшает работу приводов-актуаторов или аналогичных приводов в условиях различия векторной «раскладки» сил в рычажно-тяговой системе приводов поворота рычагов подвески задних колес и, кроме того, повышает надежность завершения режима движения на одном из ходов с переходом на другой в случае отказа привода-актуатора);
- при предыдущей совокупности признаков пружина привода поворота рычага подвески каждого заднего колеса может быть выполнена газовой (это в большей степени соответствует требованию компактности устройства);
- содержит два индивидуальных для рычажных подвесок задних колес привода поворота рычагов, с возможностью оперативного задания неодинаковых значений углов а наклона рычагов.
- транспортное средство может содержать один общий для обеих рычажных подвесок задних колес привод поворота рычагов, при этом шарнирно установленные основания рычагов должны быть жестко соединены друг с другом поперечным валом (это в значительной степени улучшает массогабаритные характеристики и особенно снижает стоимость транспортного средства, что для социального сектора является важнейшим положительным фактором);
- транспортное средство может содержать два индивидуальных для рычажных подвесок задних колес привода поворота рычагов, с возможностью оперативного задания неодинаковых значений углов а наклона рычагов (это несколько снижает эффективность по предыдущему абзацу в части массогабаритных характеристик, но зато обусловливает еще большую маневренность транспортного средства, что выражается в способности прямолинейного движения на косогоре и виража на меньших кинематических радиусах и с при больших скоростях за счет повышения динамической устойчивости, компенсации действия центробежной силы; повышается не только динамическая, но и статическая устойчивость, что расширяет возможности стоянки транспортного средства на крутом косогоре; более того, появляется дополнительная возможность инвалиду-пользователю легче дотягиваться до предметов на поверхности слева или справа от транспортного средства);
- устройство независимого поворота задних колес может быть выполнено с возможностью их поворота в диапазоне углов от 0 до 90° (это позволяет сделать «сверхманевренность» еще более выраженной, поскольку в дополнение к способности поворачиваться на месте - с нулевым радиусом, появится дополнительная возможность движения боком - перпендикулярно продольной оси транспортного средства, плюс минимизирует энергопотребление благодаря замене силового способа поворота кинематическим в расширенном до 90° диапазоне углов поворота колес);
- устройство независимого поворота задних колес может быть выполнено с возможностью поворота колес на угол от 0 до 180° (это делает маневренность транспортного средства выраженной предельно, за счет возможности движения вообще в любом направлении по азимуту с места, плюс минимизирует энергопотребление благодаря замене силового способа поворота кинематическим в еще более широком диапазоне углов поворота колес - до 180°);
- устройство независимого поворота задних колес может быть выполнено ручным, с расположенными над ними поворотными рычагами с рукоятками и фиксаторами (это наиболее конструктивно простой, компактный и надежный вариант обеспечения управлением движения транспортного средства).
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время именно за счет последней достигается новый технический результат в соответствии с поставленной задачей. При этом результат не проявляется как сумма известных эффектов от использования отдельных признаков, входящих в заявляемую совокупность существенных признаков, не следует явным образом из уровня техники для специалиста.
На чертежах изображены, как примеры возможности реализации заявляемого изобретения, варианты конкретного конструктивного его выполнения:
на фиг.1 упрощенно показано заявляемое транспортное средство в режиме прямолинейного движения на колесном ходу по горизонтальной плоскости, общий вид сбоку, где α - угол наклона рычагов подвески задних колес в продольной вертикальной плоскости по отношению к горизонтальной плоскости; µ - угол наклона кресла (сиденья как базового его элемента) в продольной вертикальной плоскости по отношению к горизонтальной плоскости; β - угол наклона нижней ветви гусеницы в продольной вертикальной плоскости назад-вверх по отношению к горизонтальной плоскости; γ - угол наклона задней ветви гусеницы в продольной вертикальной плоскости назад-вверх по отношению к горизонтальной плоскости;
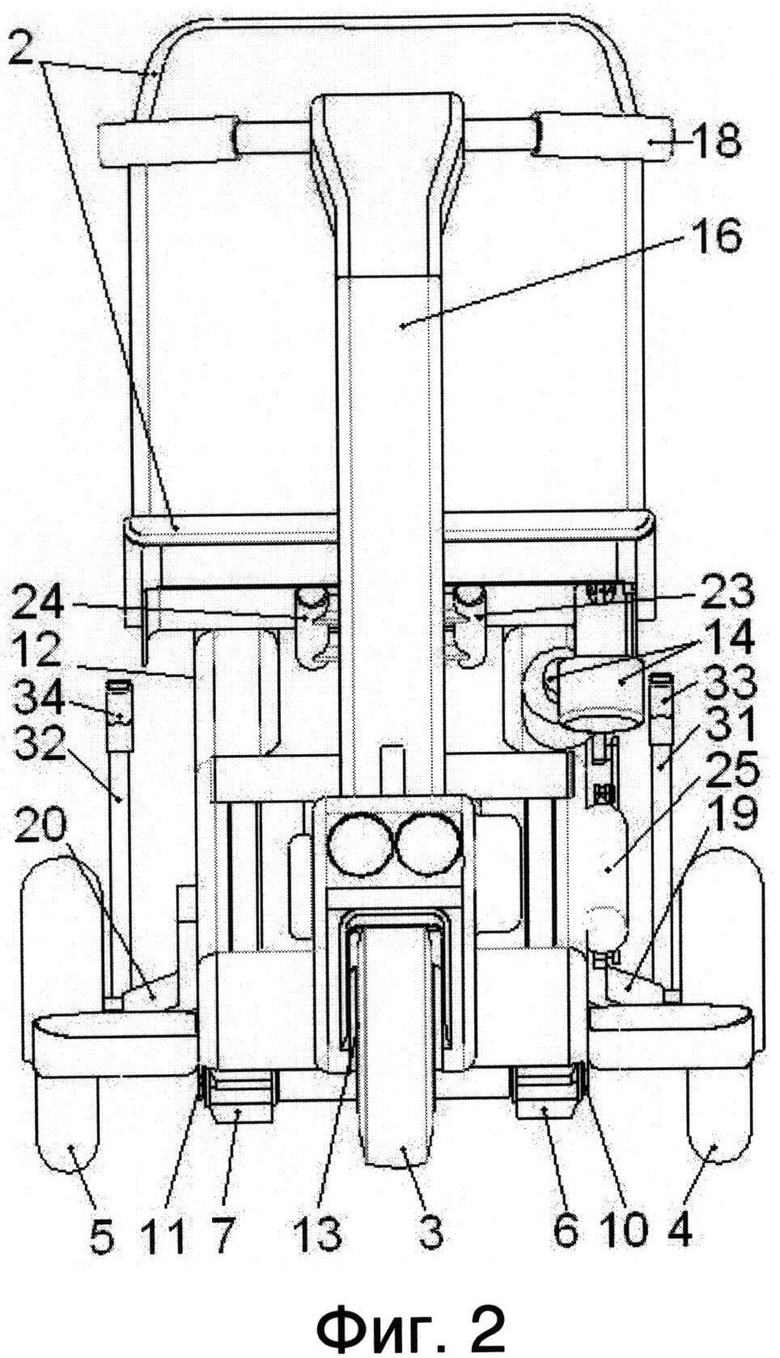
на фиг.2 то же, общий вид спереди;
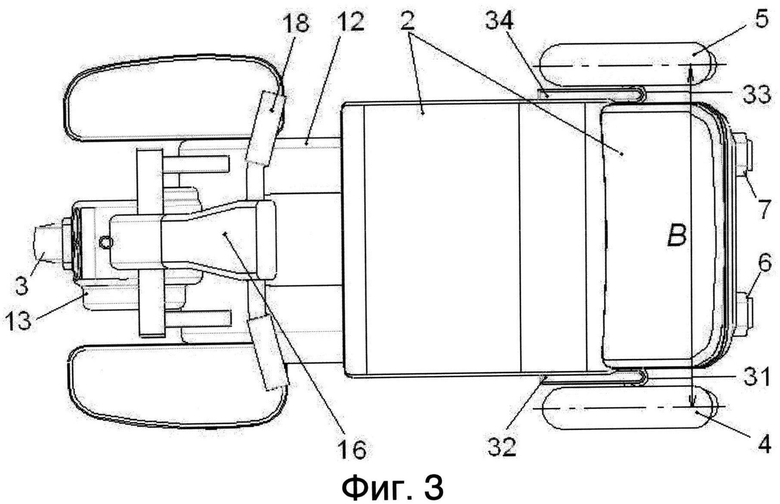
на фиг.3 - то же, общий вид в плане (сверху), где B - колея транспортного средства;
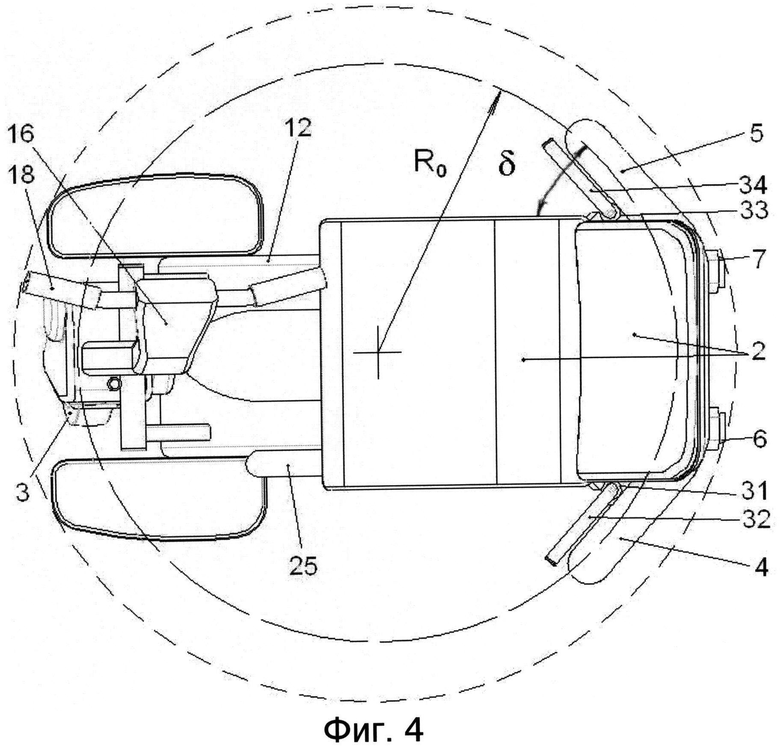
на фиг.4 упрощенно показано заявляемое транспортное средство в режиме поворота с нулевым радиусом на колесном ходу на горизонтальной плоскости, общий вид в плане, где δ - угол поворота заднего колеса в горизонтальной плоскости; R0 - расчетный радиус окружности, описываемой центрами колес при повороте транспортного средства с нулевым радиусом;
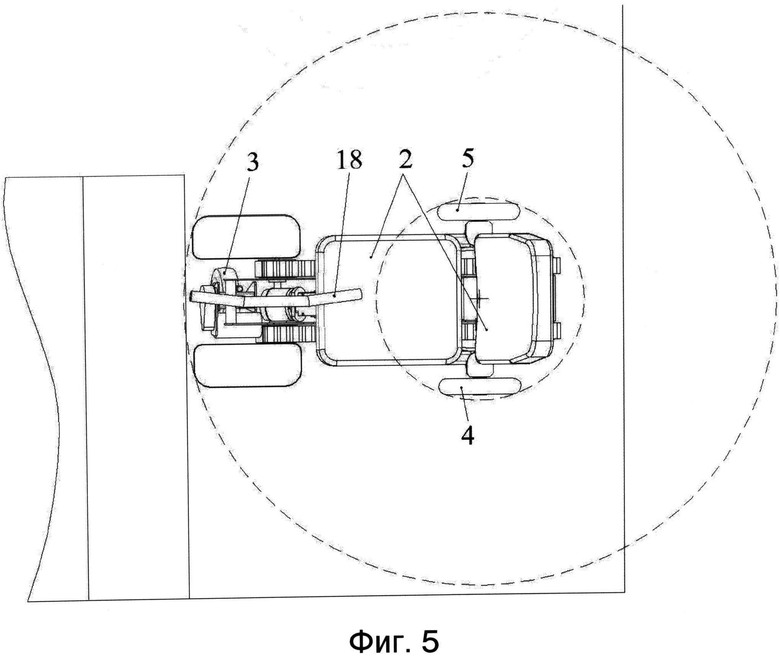
на фиг.5 - в режиме поворота с радиусом, равным базе транспортного средства, на колесном ходу на горизонтальной плоскости, общий вид в плане;
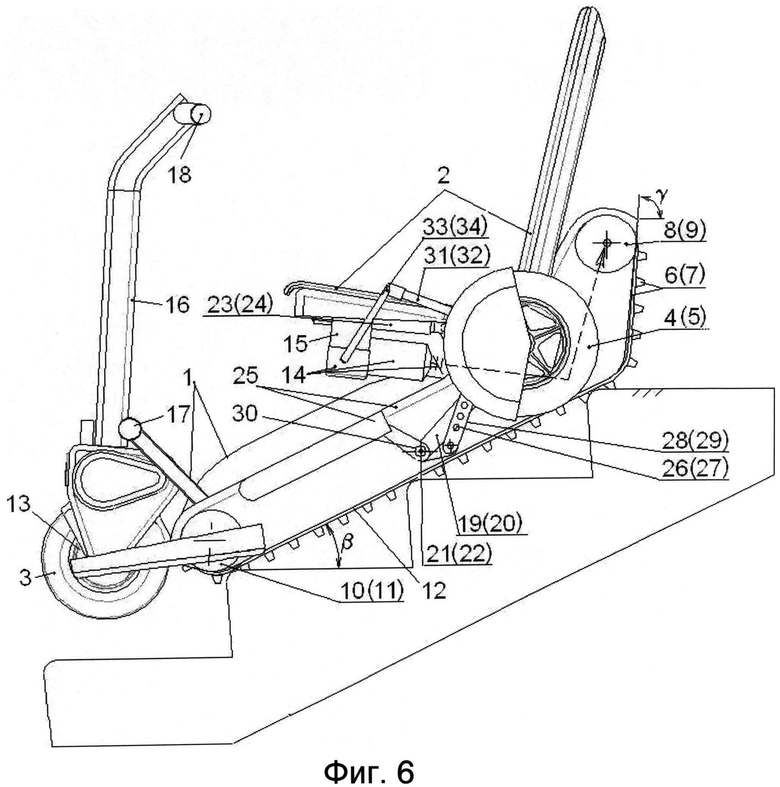
на фиг.6 упрощенно показано заявляемое транспортное средство в режиме движения на гусеничном ходу по лестнице, общий вид сбоку;
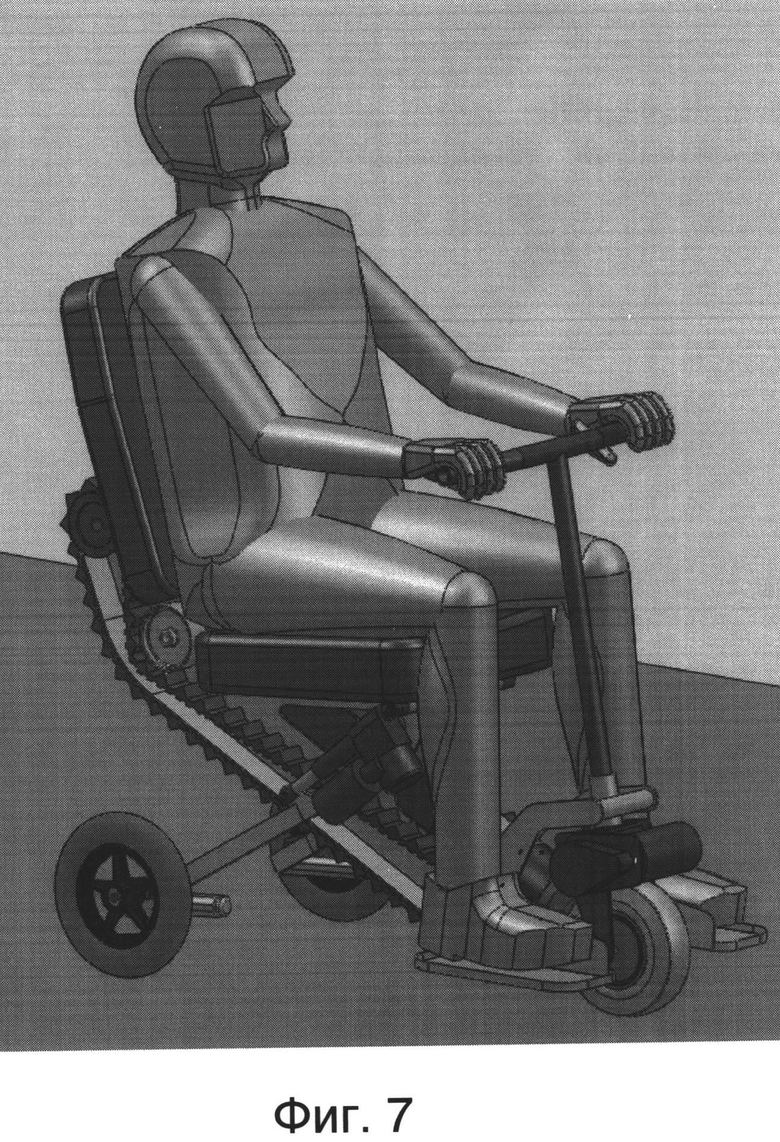
на фиг.7 - компьютерная модель заявляемого транспортного средства с человеком-пользователем в режиме движения на колесном ходу на горизонтальной плоскости, общий вид спереди-справа-сверху;
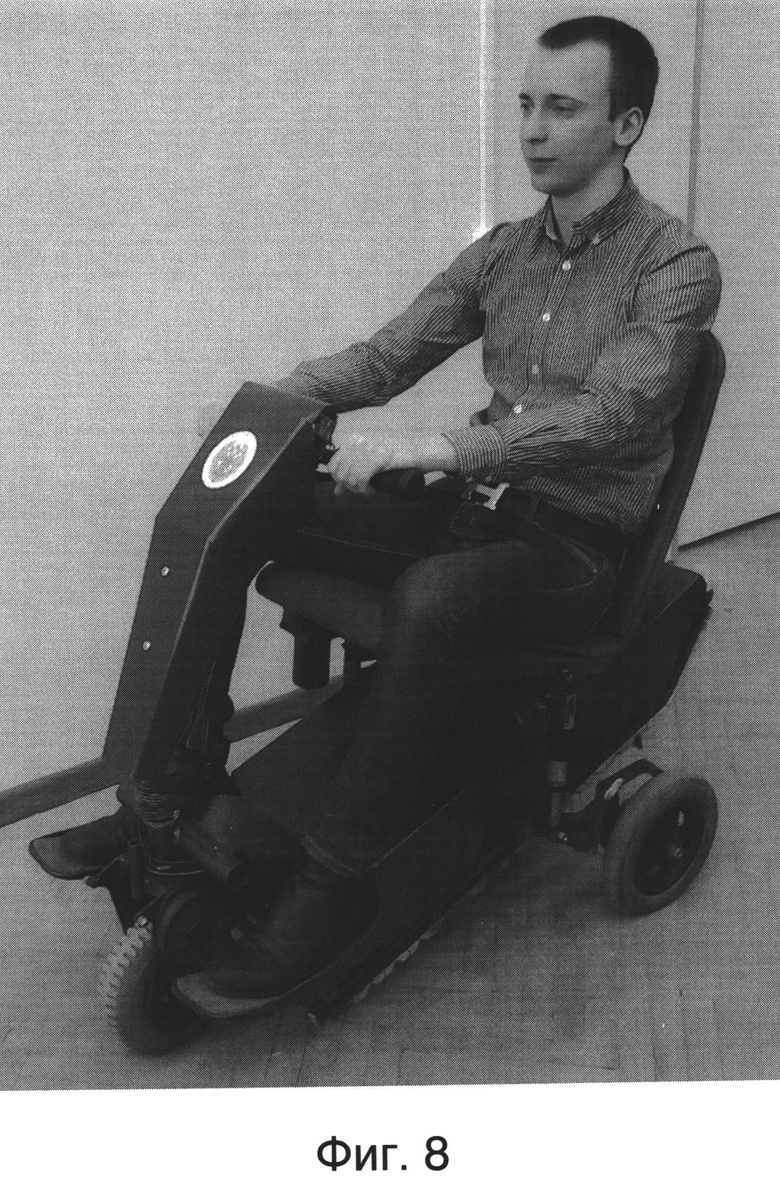
на фиг.8 - полномасштабный ходовой макет заявляемого транспортного средства (2013 г.) с человеком-пользователем в режиме движения на колесном ходу на горизонтальной плоскости, общий вид спереди-слева-сверху;
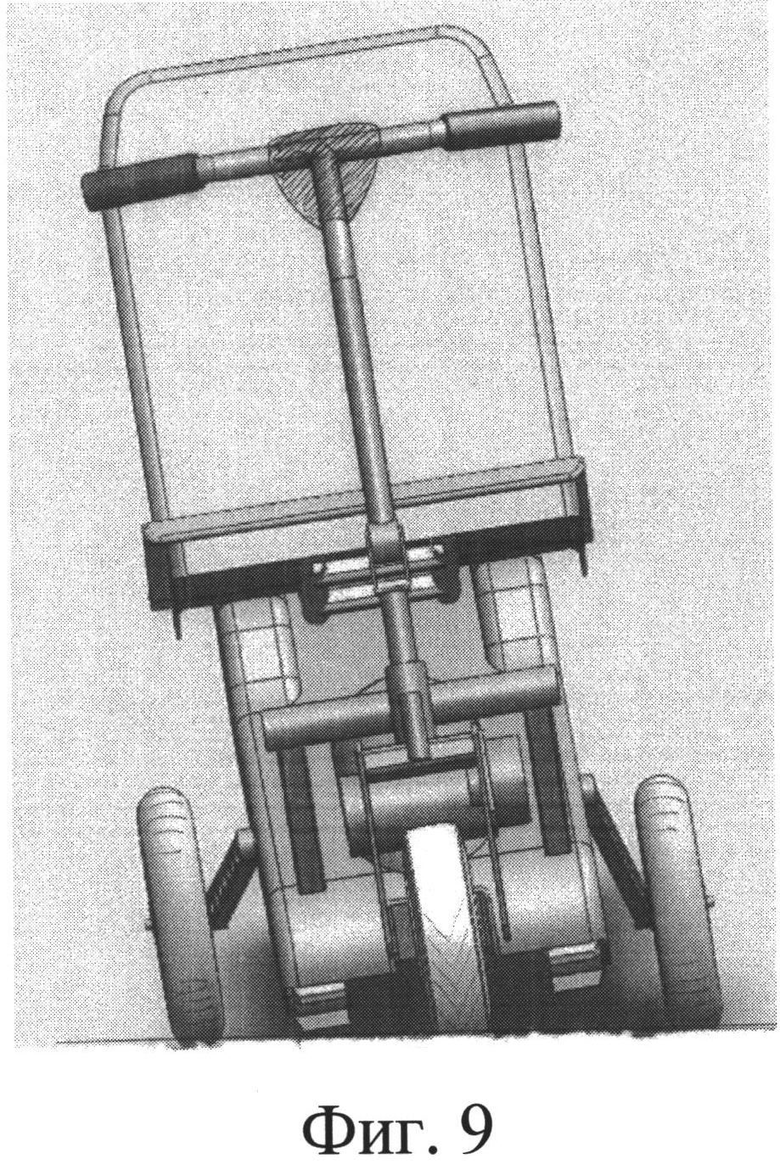
на фиг.9 - эскиз заявляемого транспортного средства в режиме поперечной стабилизации (дифференцированного управления углами наклона рычагов подвески задних колес, вид спереди;
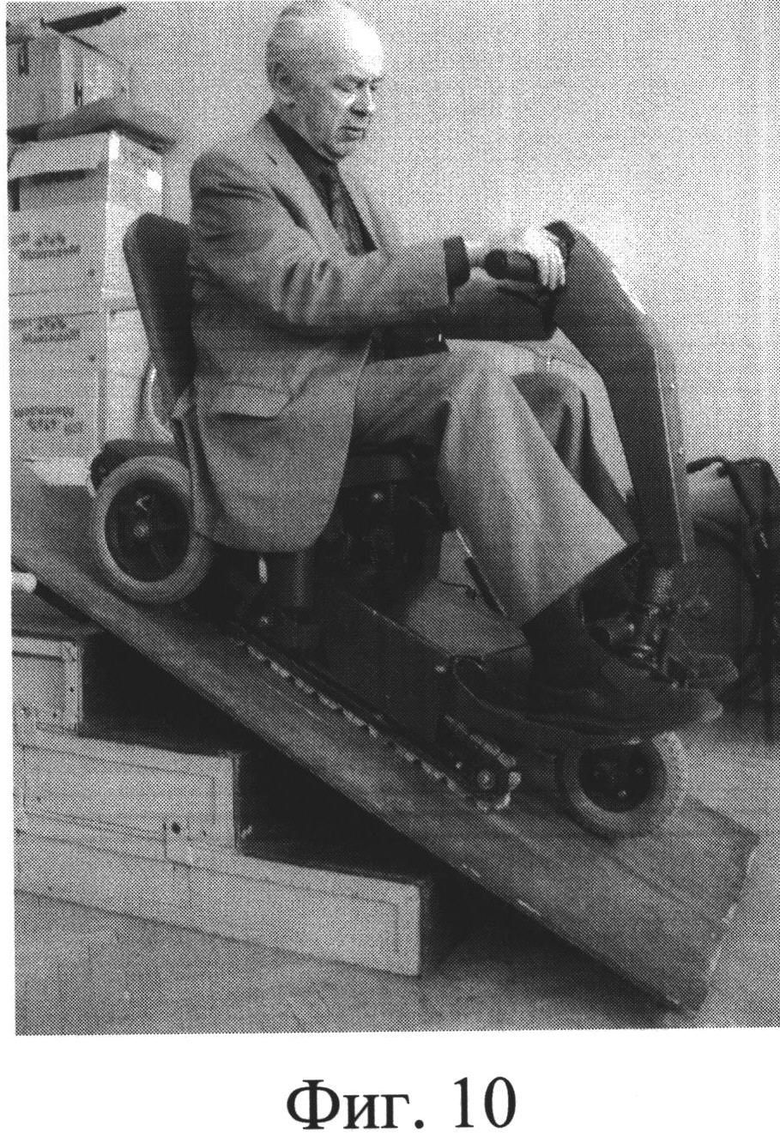
на фиг.10 - ходовой макет заявляемого транспортного средства с человеком-пользователем при движении на гусеничном ходу по наклонной плоскости вниз/вверх;
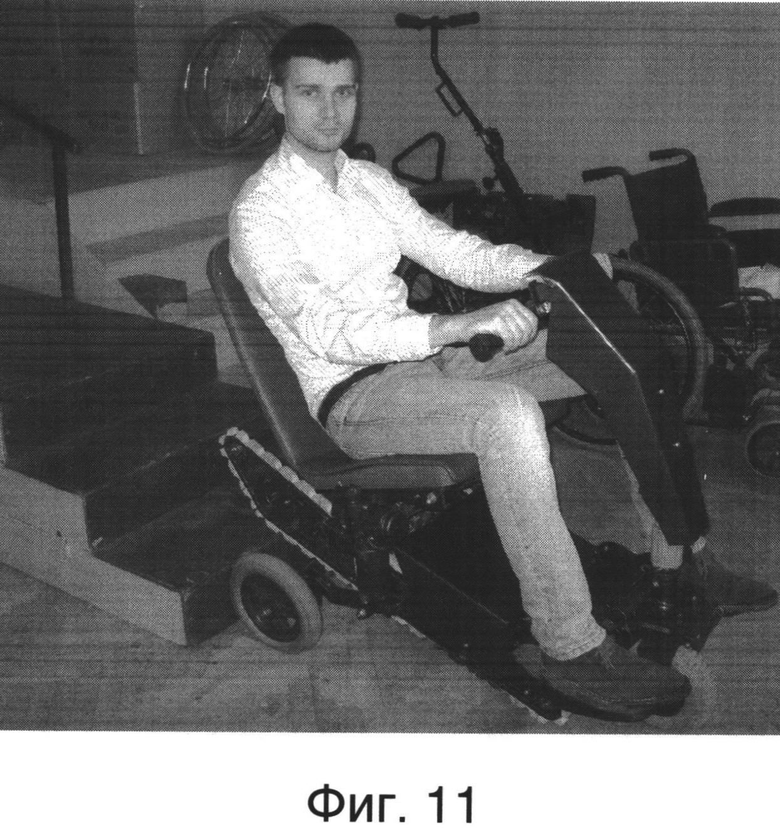
на рис.11 - ходовой макет заявляемого транспортного средства с человеком-пользователем непосредственно перед преодолением лестницы в режиме подъема по ней, общий вид спереди-справа-сверху;
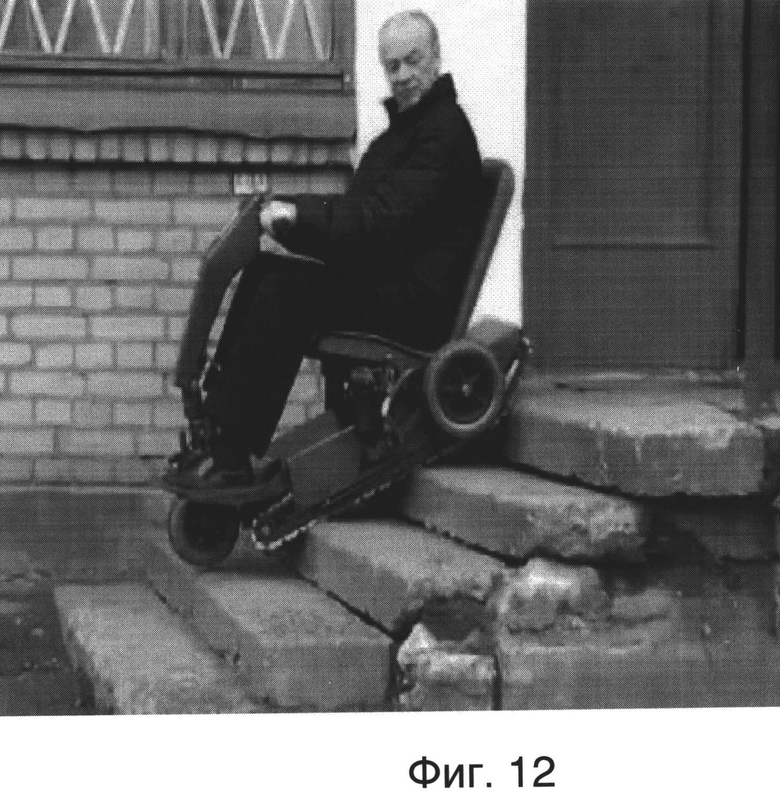
на рис.12 - ходовой макет заявляемого транспортного средства с человеком-пользователем при движении на гусеничном ходу вверх по лестнице, вид справа по движению.
Универсальное колесно-гусеничное транспортное средство для инвалида содержит (фиг.1-3) раму 1 постоянной формы (т.е. нетрансформируемую), кресло 2, жестко (т.е. неподвижно) установленное на раме 1, колесный движитель с передним 3 и парой задних колес (4 и 5), гусеничный движитель в составе тележки, конструктивно совмещенной с рамой 1 (т.е. рама 1 является одновременно тележкой гусеничного движителя), с парой гусениц (6 и 7), ведущими звездочками (8 и 9 соответственно) и направляющими элементами в виде направляющего колеса (направляющей звездочки, ленивца) 10 и 11 и металлического направляющего контура 12 (с дополнительной функцией усилителя рамы-тележки 1, при этом между гусеницей 6 (7) и контуром 12 может быть предусмотрено множество роликов подшипникового типа для снижения трения при перемотке гусениц - не показаны).
Кресло 2 установлено на раме неподвижно (при этом возможность предварительной регулировки угла µ наклона кресла 2 относительно рамы 1 «под конкретного пользователя» с учетом его антропологических и эргономических особенностей и предпочтений, о чем см. далее по тексту, допускается, но выходит за рамки предмета настоящего изобретения). При этом нижняя и задняя ветви каждой гусеницы 6, 7 в режиме взаимодействия колесного движителя с опорной поверхностью (иначе говоря, в нерабочем, поднятом, вывешенном положении гусеничного движителя) наклонены в продольной вертикальной плоскости назад-вверх под острыми углами β и γ соответственно, геометрически образуя плавный, по радиусу изгиба ее опоры со стороны рамы 1, «излом» гусеничного обвода в месте перехода нижней ветви гусеницы 6 (7) в заднюю. С учетом 30-градусного наклона большинства стандартных лестничных маршей жилых домов, общественных зданий и сооружений оптимальным следует считать значения этих углов β=30°, что позволяет сохранить углы продольного наклона рамы 1 и соответственно кресла 2 в режиме движения транспортного средства на гусеничном ходу по лестнице.
Задняя же ветвь может быть наклонена под углом к горизонтальной плоскости, в принципе, в диапазоне примерно γ=(65…80)°.
В процессе испытаний полномасштабного ходового макета транспортного средства на лестницах (см. фиг.11, 12), авторами выявлено оптимальное, с точки зрения профильной проходимости и курсовой устойчивости движения на лестничном марше, значение угла атаки:
(γ-β)opt=(68)-30°=38°.
Имеются реверсивные электромеханические (могут быть предусмотрены, в принципе, и дублирующие ручные, аналогичные известным из прототипа или иных аналогов) приводы 13 колесного (3-5) и 14 гусеничного (6-12) движителей, источник 15 автономного электропитания приводов 13 и 14. Кроме того, предусмотрены тормоза (не показаны) и система управления режимами движения (не показана), включающая устройство поворота переднего колеса (подробнее см. далее по тексту).
Переднее колесо 3 выполнено в виде мотор-колеса (в ступицу колеса 3 встроен электрический привод 13 в пределах контура последнего или с выходом за его пределы).
Привод 13 переднего колеса 3 (мотор-колесо 3+13) в обязательном порядке выполнен с возможностью движения транспортного средства по ровной горизонтальной поверхности в скоростном режиме (наряду с возможностью движения в тихоходном режиме аналогично прототипу) до 20 км/ч (как правило, для пользователя-инвалида выше 20±8 км/ч не рекомендуется, скоростным режимом для малоразмерных колесных машин такого назначения считается диапазон примерно от 6 до 12-28 км/ч).
Устройство поворота переднего колеса 3 выполнено в виде рулевой колонки 16, как правило, с изменяемым углом продольного ее наклона (за счет шарнира 17 с поперечной осью и не показанном на чертеже фиксаторе колонки) и рулем 18, преимущественно T-образным, мотоциклетного типа (как более эргономичного для скутеров с возможностью поворота колеса в диапазоне углов (в горизонтальной плоскости, то есть по азимуту) ±90°.
Задние колеса 4 и 5 выполнены либо ведомыми (преимущественный конструктивный вариант, реализованный, в частности, в двух ходовых макетах авторского исполнения), либо с возможностью ручного их вращения, например, по известной применительно к ручным инвалидным коляскам схеме с обручами для кистей рук на внешних торцах (при увеличенных диаметрах колес - не показано).
Предусмотрено устройство выборочного ввода одного из указанных движителей во взаимодействие с опорной поверхностью. Оно выполнено в виде рычажной подвески (упругость которой не обязательна) задних колес 4, 5 (как правило, на упругих шинах) с приводами поворота рычагов 19 и 20 подвески в продольных вертикальных плоскостях на соосных шарнирах, соответственно, 21 и 22 с поперечными осями.
Приводы поворота рычагов 19 и 20 в вертикальных плоскостях на углы α (см. фиг.1), необходимые и достаточные для поочередного ввода колесного и гусеничного движителей во взаимодействие с опорной поверхностью, могут быть выполнены на базе линейных электромеханических приводов 23 и 24 (актуаторов, согласно современной терминологии в области приводной техники; «на базе», поскольку не исключены, в частных вариантах кинематических схем, промежуточные рычаги), с возможностью (посредством системы управления) оперативного задания неодинаковых значений углов а наклона рычагов левого и правого бортов транспортного средства (дифференцированное управление - см. фиг.9).
Корпус каждого привода 23, 24 установлен на раме 1 или кресле 2, а шток соединен с рычагом 19, 20 подвески заднего колеса 4, 5 посредством болтового или иного жесткого соединения.
Привод поворота рычага 19 (20) может быть дополнительно снабжен как минимум одной возвратной пружиной 25, предпочтительно газовой, сжимаемой при движении штока привода 23 (24) в одну сторону и работающей самостоятельно или в параллель с приводом 23 (24) при движении его штока в другую сторону (такая схема рациональна в связи с тем, что приводы на прямом их ходу эффективнее в силовом плане, чем на обратном ходу, и, соответственно, для надежности срабатывания на обратном ходу).
Имеется устройство регулирования (предварительной ручной корректировки) угла µ продольного наклона гусеничной тележки (а значит, и рамы 1) относительно горизонтальной плоскости (т.е. в абсолютной системе координат), которое может быть выполнено в виде перфорированных (продольный ряд отверстий 26 (27) под фиксатор на рычаге 19 (20), например болт с гайкой типа «барашек») перемычек-тяг 28, 29. Последние установлены порознь по каждому борту транспортного средства с возможностью предварительного регулирования по длине за счет указанной перфорации, при этом перемычки-тяги 28, 29 соединяют подвижный элемент привода поворота рычага 19 (20) подвески заднего колеса, в частности конец штока привода 23 (24), с рычагом 19 (20).
Может быть реализован и вариант конструкции с одним комплектом «привод 23 (24) плюс газовая пружина 25 плюс перемычка-тяга 28 (29)» на одно транспортное средство. Но при этом обязательна жесткая взаимосвязь между основаниями рычагов 19, 20, например в виде «межрычажного» вала 30 с поперечной осью (вал 30 соосен шарнирам 21 и 22).
Предусмотрено устройство независимого поворота задних колес (относительно вертикальной оси, т.е. в горизонтальной плоскости - по азимуту), по меньшей мере, левого налево, а правого направо в диапазоне углов от 0 до величины, обеспечивающей кинематический поворот транспортного средства с нулевым радиусом.
Математически это можно выразить через геометрические параметры шасси транспортного средства зависимостью: δ=arccos(B/2R0), где B - колея транспортного средства; R0 - расчетный радиус окружности, описываемой центрами колес при повороте транспортного средства с нулевым радиусом (см. фиг.3, 4).
В развитие последней конструктивной и функциональной особенности, как дополнительные признаки заявляемого транспортного средства, устройство поворота задних колес может быть выполнено с возможностью независимого поворота каждого заднего колеса 4, 5 на угол δ существенно в большем диапазоне углов - от 0 до 180°, или, как вариант, промежуточный по эффективности показателя «сверхманевренность» (при проблемах компоновки в конкретных конструкциях) - от 0 до 90°. Причем правого колеса 5 - по часовой стрелки, а левого колеса 4 - против часовой стрелки (см. фиг.4) с расположенными над ними для этого поворотными рычагами 31 (32) с рукоятками 33 (34) и фиксаторами (фиксаторы не показаны).
Среди известных устройств и способов не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время именно за счет последней достигается новый технический результат в соответствии с поставленной задачей (причинно-следственная связь отражена выше - в скобках в краткой характеристике дополнительных признаков изобретения и ниже - в описании работы устройства).
Описанный пример конкретного варианта конструкции не исключает других возможных вариантов устройства в рамках заявляемой совокупности существенных конструктивных признаков (см. формулу изобретения).
Заявляемое устройство работает следующим образом.
В режиме движения по ровной (горизонтальной, под уклон или слабо выраженный косогор) поверхности, т.е. при отсутствии профильных препятствий типа лестниц, поребриков, эскарпов, рычаги 19, 20 установлены в исходном положении под одинаковым углом α, при котором с опорной поверхностью взаимодействуют ведущее 3 и пара ведомых 4 и 5 колес, а гусеничный движитель 6-12 вывешен и подвод энергии к его ведущим звездочкам 8 и 9 не осуществляется (см. фиг.1-3).
При этом в тихоходном режиме (от 0 до примерно 6 км/ч) в стесненных условиях (режим «кресло-коляска») колесо 3 вращается от привода 13 на малых оборотах (движение за счет электромеханического привода), либо в частном случае пользователь вращает колеса 4, 5 вручную известным способом (оговоренная выше дополнительная опция). В последнем случае - либо задним ходом обеими руками, либо, при острой необходимости, передним ходом одной рукой, второй рукой удерживая руль 18. Введением в конструкцию фиксатора положения руля удерживание руля уже не обязательно.
Поворот транспортного средства на месте осуществляют поворотом переднего управляемого колеса 3 посредством руля 18 (при удобном положении колонки 16, предварительно повернутой на шарнире 17) и последующим синхронным или асинхронным (т.е. сначала левое, потом правое или наоборот), в зависимости от конкретной ситуации, поворотом колес 4 и 5 на углы δ по азимуту, соответствующие выбранной схеме поворота. Возможна и другая последовательность, когда сначала поворачивают (синхронно или асинхронно) задние колеса 4, 5, а затем - переднее колесо 3. Задние колеса 4 и 5 пользователь поворачивает вручную, воздействуя кистями рук на рычаги 31 и 32 посредством рукояток 33 и 34 соответственно, расфиксировав предварительно и вновь зафиксировав в новом положении фиксаторами.
Так, поворот переднего колеса 3 на ±90° при неповернутых задних колесах 4 и 5 дает кинематический радиус поворота вокруг центра задней оси с радиусом, равным колесной базе транспортного средства (см. фиг.5, где большой пунктирной окружностью обозначена зона ометания всем транспортным средством, а малой - зона ометания задними колесами 4, 5).
Такой же поворот переднего колеса 3 в сочетании с поворотом задних колес 4 и 5 в разные стороны на одинаковый по модулю угол по азимуту (конкретное значение угла δ зависит от геометрии шасси и в данном примере лежит в диапазоне 45-60°) дает поворот транспортного средства на месте с нулевым радиусом (см. фиг.4).
Поворот всех колес 3-5 в одну сторону на одинаковый угол по азимуту - поступательное движение в любом направлении (в том числе и боком) в соответствии с углом установки колес 3-5.
Описанные два режима поворота с малым радиусом ометания (особенно с нулевым радиусом поворота по фиг.4) и режимы изменения поступательного движения по ломаной траектории вплоть до движения боком определяют так называемую «сверхманевренность» транспортного средства.
В скоростном режиме рулевую колонку 16 выставляют на удобный для этого режима угол наклона в продольной вертикальной плоскости (под антропологические, эргономические данные и привычки пользователя) и колесо 3 вращается от привода 13 на больших оборотах (см. фиг.1-3, 7-9).
Поворот в скоростном режиме осуществляют исключительно за счет поворота переднего колеса 3 с кинематическим радиусом, превышающим базу транспортного средства.
В приводе 13 для этого может использоваться, например, высшая (т.е. с меньшей редукцией) передача в ступенчатой механической части этого мотор-колеса.
Стоянку и движение по прямой или с поворотом (вираж) на крутых косогорах, а также кинематический поворот на больших скоростях осуществляют, предварительно задав, посредством приводов 23 и 24 (актуаторов) и системы управления, разные значения углов α в компенсацию угла наклона опорной поверхности и/или действия центробежной силы в крутом повороте на горизонтальной поверхности и на вираже (см. фиг.9). При этом центр тяжести транспортного средства смещается вверх по косогору. Повышаются и устойчивость (статическая и динамическая) и маневренность (возможность кинематического поворота с меньшими радиусами в скоростном («скутерном») режиме.
Здесь не лишне обратить внимание и на расширение возможностей пользователя дотягиваться до предметов, находящихся на опорной поверхности (например, инвалид выронил указанный предмет на пол и его необходимо поднять): задание транспортному средству описанным способом крена на борт, у которого находится предмет, сокращает дистанцию от кисти руки пользователя до этого предмета.
При движении по грязи, рыхлому песку, снегу и др. грунтам со слабой несущей способностью или по некачественной дороге (например, с выщерблинами) включают приводы (актуаторы) 23, 24, которые поворачивают (преодолевая вес большей части транспортного средства с пользователем) рычаги 19, 20 на больший угол α, при котором на смену колесному движителю 3-5 во взаимодействие с опорной поверхностью вступает гусеничный движитель 6-12.
Движение, причем только в «тихоходном» режиме, осуществляют с подводом энергии от того же источника 15, но посредством привода 14 на ведущие звездочки 8, 9. При этом больший наклон γ передней ветви гусеницы в сравнении с наклонном β нижней ветви позволяет сохранить угол атаки γ-β гусеничного движителя при движении на лестничный подъем или к иному профильному препятствию в этом режиме задом на достаточном уровне.
Таким образом, излом гусеничного обвода (плавный переход нижней ветви гусеницы в заднюю ее ветвь) безусловно полезен в двух эксплуатационных ситуациях - как при движении по поверхности с низкой несущей способностью на гусеничном ходу, так и при преодолении профильных препятствий в виде лестниц, отдельных ступеней (эскарпов) и поребриков.
Еще один специфический (используемый относительно редко) режим эксплуатации транспортного средства - движение на гусеничном ходу по крутому подъему или спуску с малым коэффициентом сцепления, например по обледенелому пандусу или металлической аппарели. Разумеется, тогда, когда на колесах недостаточно сцепления или велика вероятность потери сцепления. Такой режим очевиден из фиг.10.
Описанные выше режимы рассматриваются как вспомогательные и используемые редко, при острой необходимости. Поэтому некоторое неудобство пользователю, вызванное вынужденным временным продольным наклоном кресла 1 на угол от номинального его положения, допустимо и оправдано (чтобы не предусматривать в конструкции устройство оперативного компенсирующего продольного наклона кресла).
Для преодоления профильных препятствий в виде стационарной лестницы или эскалатора метрополитена или супермаркета, также переходят на гусеничный ход. Это делают описанным выше образом, как правило, непосредственно перед лестницей (эскалатором) - см. фиг.11. При этом задние и нижние ветви гусениц 6 и 7, приподнятые под углами γ и β соответственно (а последний, как правило, соответствует углу продольного наклона лестничного марша β=30°), нависая над первой ступенью (перед подъемом), обеспечивает беспрепятственный первичный въезд на нее транспортного средства задней частью.
За счет оптимального угла атаки (γ-β)opt=68-30°=38° задних ветвей гусениц асинхронность взаимодействия левой и правой гусениц с кромкой впереди стоящей ступенью минимальна и курсовая устойчивость, как правило, поддерживается на приемлемом уровне.
Второй этап перемещения транспортного средства происходит, в силу геометрии комбинированной колесно-гусеничной ходовой части, в смешанном гусенично-колесном режиме (колесо 3 еще не выходит из контакта с горизонтальной площадкой перед лестничным маршем). Дальнейшее самостоятельное движение по лестнице или фиксация на ступенях движущегося эскалатора, начиная с третьей ступени, осуществляется уже при всех вывешенных колесах 3-5 и одновременным перекрытием нескольких ступеней (в данном примере - трех) нижними ветвями гусениц 6 и 7 (см. фиг.6, 12), что обеспечивает устойчивость транспортного средства на лестнице (эскалаторе).
За счет соответствия исходного угла β наклона нижней ветви углу продольного наклона лестничного марша при жесткой взаимосвязи с креслом 2 последнее автоматически сохраняет угол своего наклона относительно горизонтальной плоскости на всем регулярном участке движения по лестничному маршу.
Регулировку угла µ делают предварительно (при необходимости, в зависимости от индивидуальных антропологических и эргономических особенностей пользователя и/или угла подъема лестницы) изменением длины перемычек 28 и 29 - перестановкой фиксатора (упомянутого болта) на другое отверстие 26 (на левом борту) и 27 (на правом борту).
Разумеется, в пределах допустимости сопутствующего изменения при этом угла β наклона нижних ветвей 12 гусениц. В противном случае могут быть применены другие известные способы и средства регулировки угла наклона сиденья.
Опора гусениц (гусеничных цепей или лент) 6 и 7 тыльными своими поверхностями на направляющий контур 12 со множеством роликов, позволяющая отказаться от опорных катков с подвеской (см. прототип), что обусловливает улучшение массогабаритных характеристик транспортного средства. Снижению массы и габаритов транспортного средства способствуют также описанные выше компоновочные решения с начальной установкой острого угла β, соответствующего углу подъема стандартной лестницы здания, как средством реализации предлагаемого оригинального способа сохранения заданного угла µ положения кресла 2 в пространстве при переходе с горизонтального участка опорной поверхности на наклонный (включая лестницу).
Преодоление последней ступени лестничного марша сопровождается смешанным колесно-гусеничным режимом взаимодействия с опорной поверхностью.
Преодолев все ступени лестницы, ходовую часть возвращают в исходное состояние: при опоре сначала на переднее колесо 3, а затем и на все колеса 3-5, синхронно увеличивают углы α наклона рычагов 19 и 20 до полного вывешивания гусеничного движителя.
Таким образом, использование изобретения позволяет расширить технико-эксплуатационные возможности транспортного средства за счет обеспечения дополнительной функции скоростного движения (скоростной режим) и перевода устройства смены режимов «колесный ход/гусеничный ход» с ручного на электромеханический, обеспечения сверхманевренности, выражающейся в способности кинематического поворота на колесном ходу с радиусом до нулевого включительно и поступательного движения в любом направлении по ломаной траектории, поперечной стабилизации транспортного средства в статике и динамике при стоянке и движении на косогоре, а также улучшения эргономических, массо-габаритных и экономических (по энергозатратам) показателей, причем при сохранении способности преодоления на гусеничном ходу лестниц и др. выраженных профильных препятствий.
Возможность промышленной реализации, подтверждение работоспособности, надежности, технико-эксплуатационных преимуществ и экономической целесообразности заявляемого устройства проверены и подтверждены авторами на инициативно изготовленном ходовом макете с описанной выше совокупностью существенных конструктивных признаков (и некоторыми непринципиальными отличиями, например перестановкой ведущих звездочек 8, 9 и ленивцев 10, 11 местами, т.е. выполнением гусеничного движителя не с задним, а с передним расположением ведущих звездочек 8, 9), с положительным результатом ходовых испытаний (см. прилагаемые к заявке на изобретение фото экспериментального образца).
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2558338C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| СЪЕМНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2308396C1 |
| Гусеничный транспортер | 2023 |
|
RU2798887C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
| ИНДИВИДУАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2466701C1 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| МАЛОГАБАРИТНЫЙ ВСЕСЕЗОННЫЙ УНИВЕРСАЛЬНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД | 2013 |
|
RU2534202C2 |
| ИНВАЛИДНАЯ ШАГАЮЩАЯ КРЕСЛО-КОЛЯСКА | 2010 |
|
RU2434622C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2005 |
|
RU2304952C1 |
Изобретение относится к колесным и гусеничным малоразмерным транспортным средствам индивидуального пользования и реабилитационной технике (транспортным средствам), конкретно к средствам перемещения инвалидов и др. лиц с ограниченными физическими возможностями. Технический результат - расширение технико-эксплуатационных возможностей за счет обеспечения дополнительной функции скоростного движения и перевода устройства смены режимов «колесный ход/гусеничный ход» с ручного на электромеханический, обеспечения сверхманевренности, выражающейся в способности кинематического поворота на колесном ходу с меньшими радиусами, до нулевого включительно, и поступательного перемещения в любом направлении, а также улучшения устойчивости, массогабаритных и экономических (по энергозатратам) показателей, причем при сохранении способности преодоления на гусеничном ходу лестниц и др. выраженных профильных препятствий. Колесно-гусеничное транспортное средство для инвалида содержит раму, кресло, колесный движитель с передним и парой задних колес и гусеничный движитель. Последний включает в себя тележку с ведущими звездочками, направляющими элементами и парой гусениц с изломом перехода их нижней ветви в заднюю. Имеются реверсивные приводы колесного и гусеничного движителей, в том числе электрический, источник автономного электропитания, тормоза и система управления режимами движения. Система управления включает в себя устройство поворота переднего колеса и устройство выборочного ввода одного из указанных движителей во взаимодействие с опорной поверхностью. Тележка гусеничного движителя совмещена с рамой. Устройство выборочного ввода одного из указанных движителей во взаимодействии с опорной поверхностью выполнено в виде рычажной подвески задних колес с приводами поворота рычагов подвески в вертикальных плоскостях, с возможностью наклона нижних ветвей гусениц назад-вверх в положении транспортного средства на колесном ходу. Переднее колесо выполнено в виде мотор-колеса с возможностью движения транспортного средства в скоростном диапазоне (до 20 км/ч), а устройство его поворота - в виде рулевой колонки с возможностью поворота переднего колеса в диапазоне углов ±90°. Предусмотрено устройство независимого поворота задних колес, по меньшей мере, левого налево, а правого направо в диапазоне углов от нуля до величины, обеспечивающей кинематический поворот транспортного средства с нулевым радиусом. Предусмотрены дополнительные конструктивные признаки устройства. 12 з.п. ф-лы, 12 ил.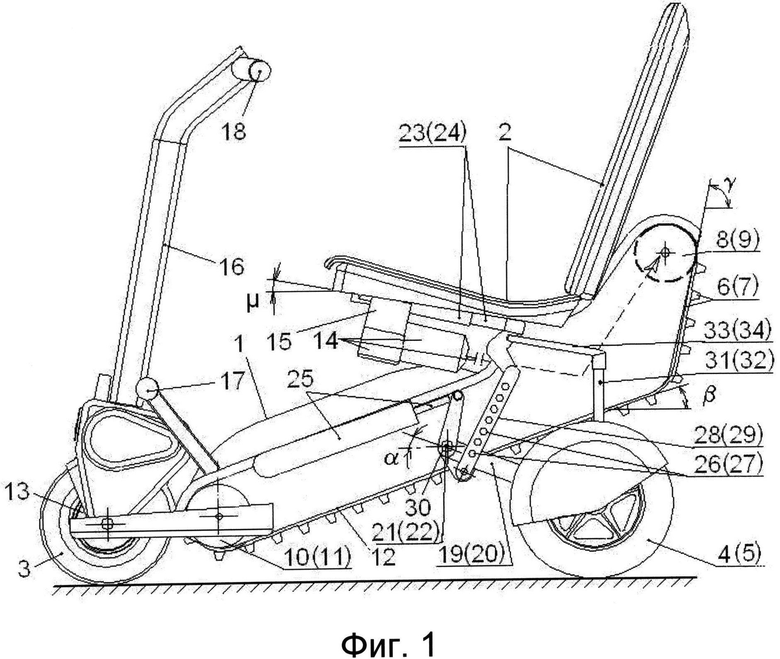
1. Колесно-гусеничное транспортное средство для инвалида, содержащее раму, кресло, колесный движитель с передним колесом и парой задних колес, гусеничный движитель в составе тележки с ведущими звездочками, направляющими элементами и парой гусениц с изломом перехода их нижней ветви в заднюю, а также реверсивные приводы колесного и гусеничного движителей, в том числе электрический, источник автономного электропитания, тормоза и систему управления режимами движения, включающую устройство поворота переднего колеса и устройство выборочного ввода одного из указанных движителей во взаимодействие с опорной поверхностью, отличающееся тем, что гусеничная тележка совмещена с рамой, устройство выборочного ввода одного из указанных движителей во взаимодействии с опорной поверхностью выполнено в виде рычажной подвески задних колес с приводами поворота рычагов подвески в вертикальных плоскостях с возможностью наклона нижних ветвей гусениц назад-вверх в положении транспортного средства на колесном ходу, переднее колесо выполнено в виде мотор-колеса с возможностью движения транспортного средства в скоростном диапазоне, а устройство его поворота - в виде рулевой колонки с возможностью поворота переднего колеса в диапазоне углов ±90°, кроме того, предусмотрено устройство независимого поворота задних колес, по меньшей мере, левого налево, а правого направо в диапазоне углов от 0 до величины, обеспечивающей кинематический поворот транспортного средства с нулевым радиусом.
2. Транспортное средство по п.1, отличающееся тем, что рулевая колонка выполнена с изменяемым углом продольного ее наклона.
3. Транспортное средство по п.1, отличающееся тем, что руль выполнен T-образным.
4. Транспортное средство по п.1, отличающееся тем, что угол наклона нижней ветви гусениц в продольной вертикальной плоскости в положении транспортного средства на колесном ходу составляет 30°, а задней ветви - 68°.
5. Транспортное средство по п.1, отличающееся тем, что привод поворота рычага подвески каждого заднего колеса выполнен на базе, по крайней мере, одного линейного электромеханического привода - актуатора, корпус которого установлен на раме или кресле, а шток соединен с рычагом подвески заднего колеса.
6. Транспортное средство по любому из пп.1, 5, отличающееся тем, что в нем предусмотрена регулируемая по длине перемычка-тяга, соединяющая подвижный элемент привода поворота рычага подвески заднего колеса, в частности конец штока привода (актуатора), с указанным рычагом.
7. Транспортное средство по п.5, отличающееся тем, что привод поворота рычага подвески каждого заднего колеса дополнительно снабжен как минимум одной возвратной пружиной, сжимаемой при движении штока актуатора в одну сторону и работающей самостоятельно или в параллель с актуатором при движении его штока в другую сторону.
8. Транспортное средство по п.7, отличающееся тем, что пружина привода поворота рычага подвески каждого заднего колеса выполнена газовой.
9. Транспортное средство по п.1, отличающееся тем, что содержит один общий для обеих рычажных подвесок задних колес привод поворота рычагов, при этом шарнирно установленные основания рычагов жестко соединены друг с другом поперечным валом.
10. Транспортное средство по п.1, отличающееся тем, что содержит два индивидуальных для рычажных подвесок задних колес привода поворота рычагов с возможностью оперативного задания неодинаковых значений углов α наклона рычагов.
11. Транспортное средство по п.1, отличающееся тем, что устройство независимого поворота задних колес выполнено с возможностью их поворота в диапазоне углов от 0 до 90°.
12. Транспортное средство по п.1, отличающееся тем, что устройство независимого поворота задних колес выполнено с возможностью их поворота в диапазоне углов от 0 до 180°.
13. Транспортное средство по п.1, отличающееся тем, что устройство независимого поворота задних колес выполнено ручным, с расположенными над ними поворотными рычагами с рукоятками и фиксаторами.
| CN 101703440 A, 12.05.2010 | |||
| RU 230976 C2,10.11.2007 | |||
| Бункер зерноуборочного комбайна | 1989 |
|
SU1616545A1 |

