Изобретение относится к области машиностроения и может быть использовано в качестве бесступенчатого автоматического привода.
Известны механические, гидравлические, электрические муфты, используемые для соединения двигателя с исполнительным механизмом. Однако усиленный нагрев и износ элементов устройств в режиме скольжения или отсутствие прямого соединения ограничивает их применение для указанной выше цели.
Поставленную задачу выполняет инерционный механизм [1], содержащий ведущий и ведомый валы, центральную шестерню, связанную с ведущим валом, водило с установленными на нем неуравновешенными сателлитами, связанное с ведомым валом и центральной шестерней посредством упругих элементов. Но в нем наличие неуравновешенных сателлитов вызывает уменьшение тяговых характеристик.
Среди известных аналогов наиболее близким по технической сущности к предлагаемому устройству является планетарный инерционный механизм [2]. Он содержит ведущий и ведомый валы, планетарный механизм с центральным колесом, водилом и маховиком, а также тормоз и два механизма свободного хода для передачи усилия от ведущего вала к ведомому с возможностью реверсирования.
В прототипе, как и в приведенном выше аналоге, инерционные массы выполнены в виде неуравновешенных сателлитов, что исключает фиксацию инерционных масс в какой-либо точке траектории их движения и таким образом не позволяет получить дополнительный импульс усилия на выходном валу и, следовательно, - более высокие тяговые характеристики. Наличие же механизма свободного хода увеличивает массу и габариты устройства.
Цель изобретения - улучшение тяговых и массо-габаритных характеристик планетарного инерционного механизма, достигаемое в результате прямого соединения ведущего и ведомого валов без применения механизма свободного хода.
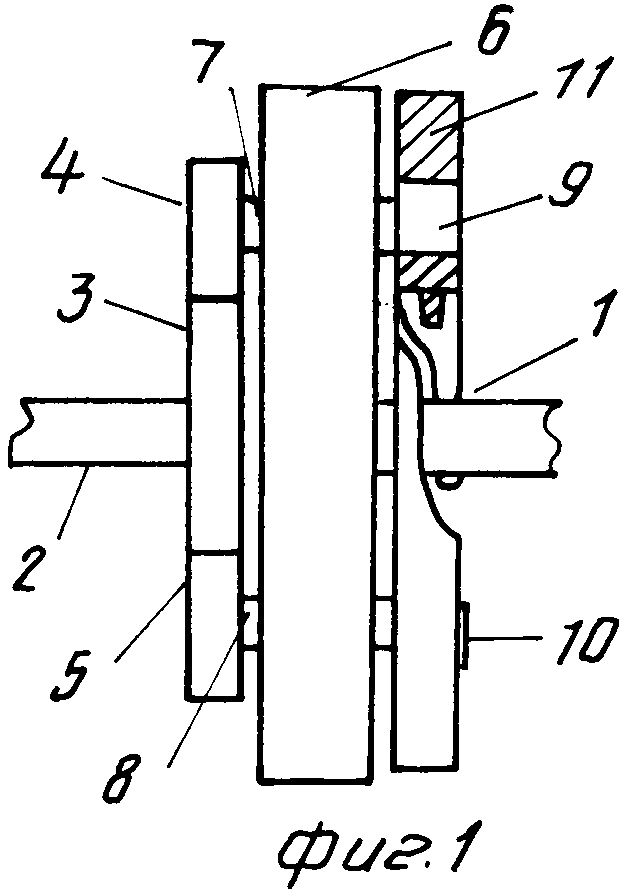
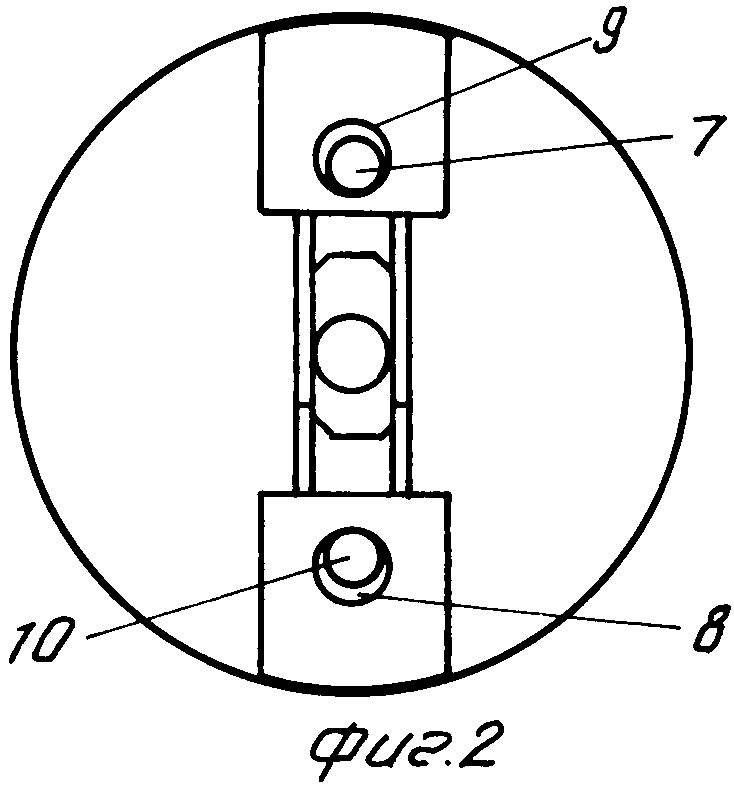
На фиг. 1 изображена конструкция механизма, вид сбоку; на фиг. 2 - то же, спереди.
Устройство содержит ведущий 1 и ведомый 2 валы, центральную шестерню 3, сателлиты 4 и 5, маховик 6. Сателлиты 4 и 5 закреплены на осях 7 и 8, связанных посредством эксцентриков 9 и 10 с инерционными массами 11.
Планетарный инерционный механизм работает следующим образом.
При малых оборотах ведущего вала 1 силы инерции и центробежные силы малы, поэтому сателлиты 4, 5 не встречают сопротивления со стороны инерционных масс 11 и свободно обкатываются вокруг центральной шестерни 3. Груз 11 свободно колеблется за счет воздействия эксцентриков 9 и 10, приводимых во вращение сателлитами 4 и 5. При увеличении оборотов ведущего вала 1 и маховика 6 увеличится центробежная сила, стремящаяся удержать груз 11 на максимальном удалении от центра. Это вызовет торможение сателлитов 4 и 5 и вращение выходного вала 2. В результате наличия дополнительной опоры груза на вал возникнет дополнительное импульсное тяговое усилие на выходном валу. При дальнейшем увеличении частоты вращения ведущего вала на инерционные массы 11 начнут действовать центробежные силы, которые при достижении номинальных оборотов вала прекратят колебание масс 11 и через эксцентрики 9 и 10 остановят вращение сателлитов вокруг осей, т.е. наступит режим прямой передачи. В режиме торможения, когда ведущий вал 1 и маховик 7 остановлены, ведомый вал 2 приведет во вращение центральную шестерню 3 и сателлиты 4 и 5, которые обеспечат колебание инерционных масс. Реакция масс создаст условия для торможения сателлитов 4 и 5 и, следовательно, ведомого вала 2.
Использование передачи позволит сохранить достоинства прототипа и при этом улучшить его тяговые и массогабаритные характеристики. Кроме того, при использовании предлагаемого устройства на транспорте существенно повышается удобство управления последним и, как следствие, улучшается безопасность его вождения и ритмичность движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Зубоотделочный станок с инерционной связью | 1987 |
|
SU1563870A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820104A1 |
| Инерционный трансформатор крутящего момента | 1975 |
|
SU729406A1 |
| ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА | 1992 |
|
RU2049284C1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1703898A1 |
| РЕКУПЕРАТИВНАЯ МЕХАНИЧЕСКАЯ САМОРЕГУЛИРУЕМАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА С МАХОВИЧНЫМ НАКОПИТЕЛЕМ ЭНЕРГИИ | 2004 |
|
RU2261385C1 |
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
Использование: в машиностроении. Сущность изобретения: механизм содержит ведущий и ведомый валы, центральное колесо, водило с сателлитами, маховик и инерционные массы. Маховик жестко связан с ведущим валом и водилом. Инерционные массы размещены на осях сателлитов посредством эксцентриков с возможностью радиального перемещения. 2 ил.
ПЛАНЕТАРНЫЙ ИНЕРЦИОННЫЙ МЕХАНИЗМ, содержащий ведущий и ведомый валы, центральное колесо, водило с сателлитами и маховик, отличающийся тем, что, с целью улучшения тяговых и массогабаритных характеристик, он снабжен инерционными массами, размещенными на осях сателлитов посредством эксцентриков с возможностью радиального перемещения в противоположных направлениях, а маховик жестко связан с водилом и ведущим валом.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Инерционный привод | 1982 |
|
SU1036999A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
