//
S
N
СЛ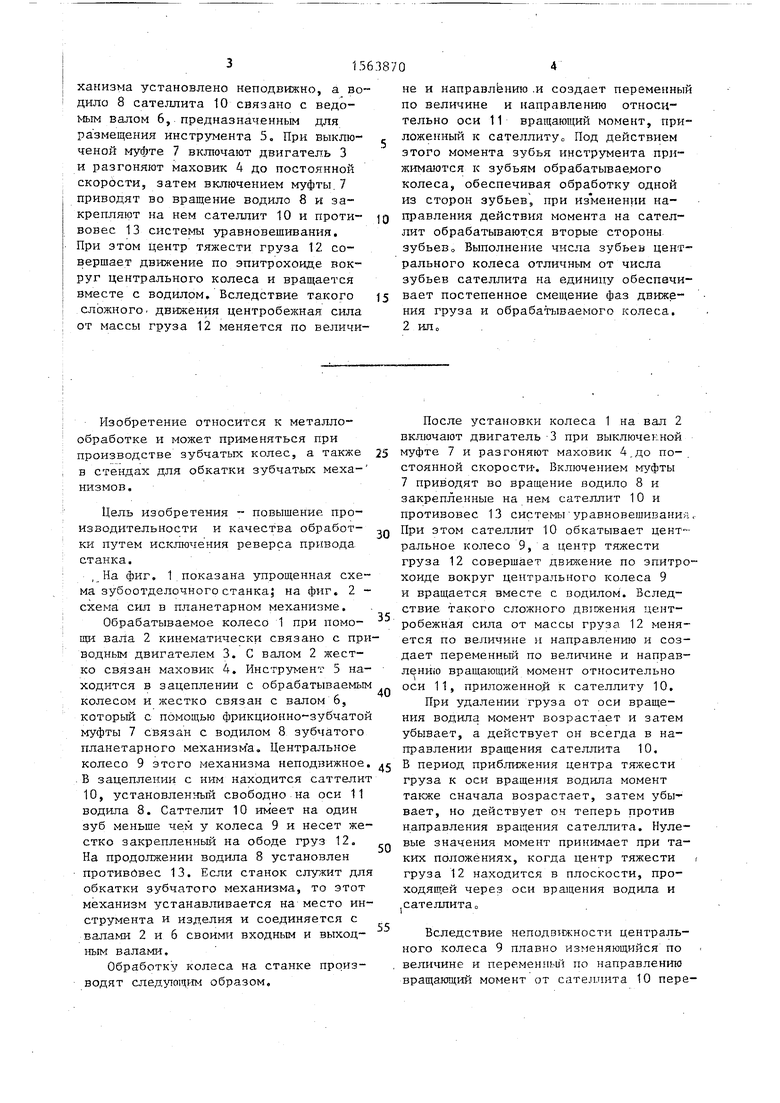
| название | год | авторы | номер документа |
|---|---|---|---|
| Бурильная машина | 2002 |
|
RU2224076C1 |
| ИНЕРЦИОННАЯ МУФТА | 1992 |
|
RU2047017C1 |
| Инерционная муфта | 1976 |
|
SU581342A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С АВТОМАТИЧЕСКИ ИЗМЕНЯЕМЫМ ПЕРЕДАТОЧНЫМ ЧИСЛОМ | 1991 |
|
RU2036361C1 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| Устройство для разгона масс | 1979 |
|
SU800470A1 |
| Дисковый древошерстный станок | 1975 |
|
SU531736A2 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ШАШКИНА С РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ | 1996 |
|
RU2115808C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ШАШКИНА С АВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ | 1996 |
|
RU2116461C1 |
Изобретение относится к металлообработке и может применяться при производстве зубчатых колес, а также в стендах для обмотки зубчатых механизмов. Цель изобретения - повышение производительности и качества обработки за счет исключения реверса привода станка. Станок содержит две инерционные массы, одна из которых в виде маховика 4 связана с ведущим валом 2, предназначенным для размещения обрабатываемого колеса 1, а другая масса в виде неуравновешенного груза 12 установлена на сателлите 10 планетарного редуктора, которым оснащен станок. Центральное колесо 9 планетарного механизма установлено неподвижно, а водило 8 сателлита 10 связано с ведомым валом 6, предназначенным для размещения инструмента 5. При выключенной муфте 7 включают двигатель 3 и разгоняют маховик 4 до постоянной скорости, затем включением муфты 7 приводят во вращение водило 8 и закрепляют на нем сателлит 10 и противовес 13 системы уравновешивания. При этом центр тяжести груза 12 совершает движение по эпитрохоиде вокруг центрального колеса и вращается вместе с водилом. Вследствие такого сложного движения центробежная сила от массы груза 12 меняется по величине и направлению и создает переменный по величине и направлению относительно оси 11 вращающий момент, приложенный к сателлиту. Под действием этого момента зубья инструмента прижимаются к зубьям обрабатываемого колеса, обеспечивая обработку одной из сторон зубьев, при изменении направления действия момента на сателлит обрабатываются вторые стороны зубьев. Выполнение числа зубьев центрального колеса отличным от числа зубьев сателлита на единицу обеспечивает постепенное смещение фаз движения груза и обрабатываемого колеса. 2 ил.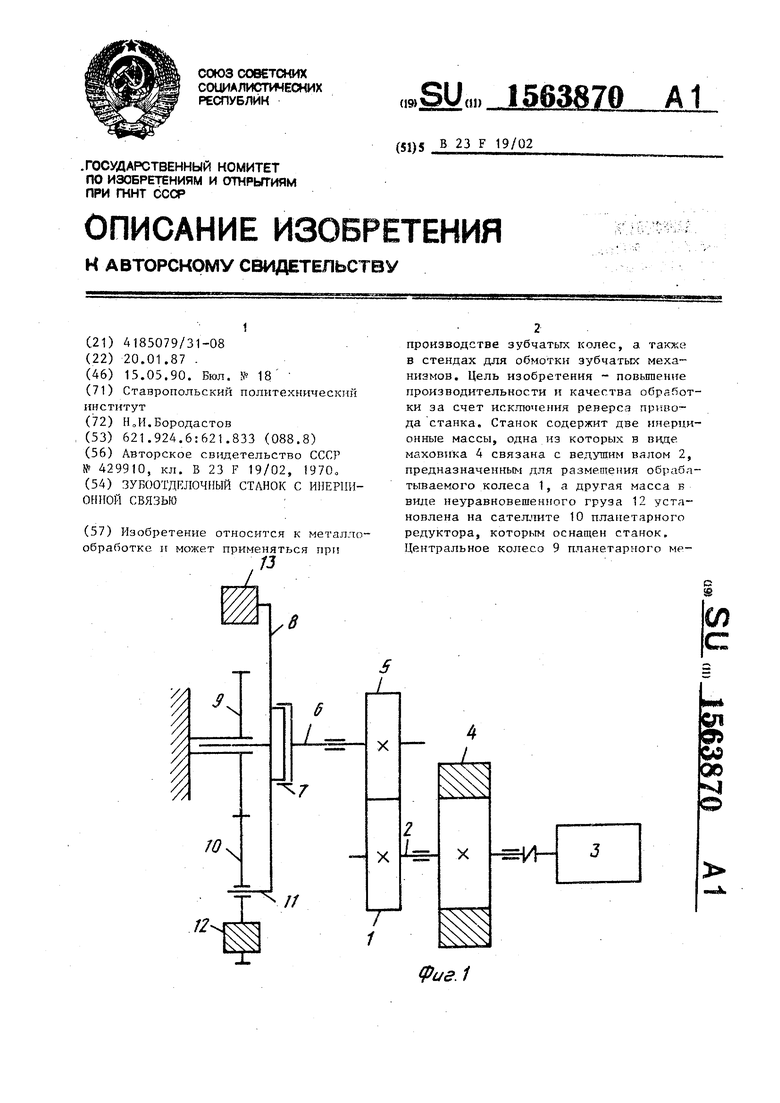
ГО
N
Т //
12
00 4
фиг.1
ханизма установлено неподвижно, а водило 8 сателлита 10 связано с ведомым валом 6, предназначенным для размещения инструмента 5. При выклю- ченой муфте 7 включают двигатель 3 и разгоняют маховик 4 до постоянной скорости, затем включением муфты 7 приводят во вращение водило 8 и закрепляют на нем сателлит 10 и противовес 13 системы уравновешивания. При этом центр тяжести груза 12 совершает движение по эпитрохоиде вокруг центрального колеса и вращается вместе с водилом. Вследствие такого сложного. движения центробежная сила от массы груза 12 меняется по величиИзобретение относится к металлообработке и может применяться при производстве зубчатых колес, а также в стендах для обкатки зубчатых меха- низмов.
Цель изобретения - повышение производительности и качества обработки путем исключения реверса привода станка.
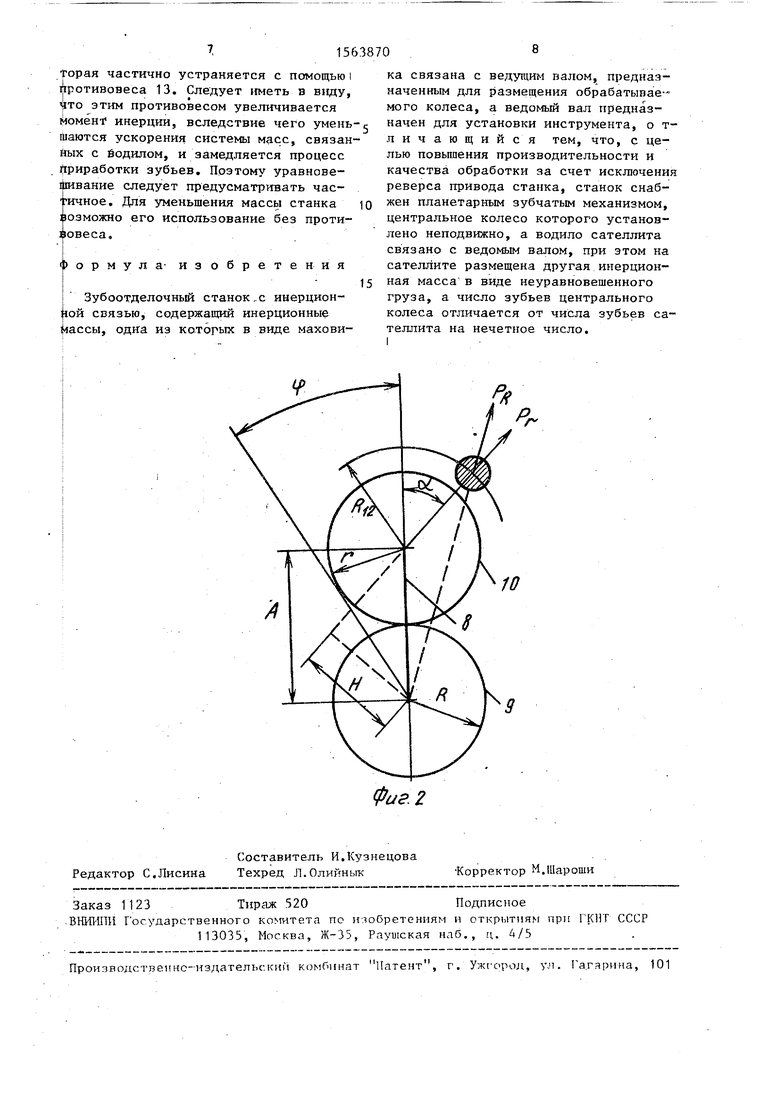
На фиг. 1 показана упрощенная схема зубоотделочногостанка; на фиг. 2 - схема сил в планетарном механизме.
Обрабатываемое колесо 1 при помо- ши вала 2 кинематически связано с приводным двигателем 3. С валом 2 жестко связан маховик 4. Инструмент 5 находится в зацеплении с обрабатываемым колесом и жестко связан с валом 6, который с помощью фрикционно-зубчатой муфты 7 связан с водилом 8 зубчатого планетарного механизма. Центральное колесо 9 этого механизма неподвижное, В зацеплении с ним находится саттелит 10, установленный свободно на оси 11 водила 8. Саттелит 10 имеет на один зуб меньше чем у колеса 9 и несет жестко закрепленный на ободе груз 12. На продолжении водила 8 установлен противовес 13. Если станок служит для обкатки зубчатого механизма, то этот механизм устанавливается на место инструмента и изделия и соединяется с валами 2 и 6 своими входным и выходным валами.
Обработку колеса на станке производят следующим образом.
не и направлению и создает переменный по величине и направлению относительно оси 11 вращающий момент, приложенный к сателлиту Под действием этого момента зубья инструмента прижимаются к зубьям обрабатываемого колеса, обеспечивая обработку одной из сторон зубьев, при из мененни направления действия момента на сателлит обрабатываются вторые стороны зубьево Выполнение числа зубьев центрального колеса отличным от числа зубьев сателлита на единицу обеспечивает постепенное смещение фаз движения груза и обрабатываемого колеса. 2 ил„
5
0
0
д
0
5
После установки колеса 1 на вал 2 включают двигатель 3 при выключенной муфте 7 и разгоняют маховик 4,до постоянной скорости-. Включением муфты
7приводят во вращение водило 8 и закрепленные на нем сателлит 10 и противовес 13 системы уравновешиванияt При этом сателлит 10 обкатывает центральное колесо 9, а центр тяжести груза 12 совершает движение по эпитрохоиде вокруг центрального колеса 9
и вращается вместе с водилом. Вследствие такого сложного движения центробежная сила от массы груза 12 меняется по величине и направлению и создает переменный по величине и направлению вращающий момент относительно оСи 11, приложенной к сателлиту 10. При удалении груза от оси вращения водила момент возрастает и затем убывает, а действует он всегда в направлении вращения сателлита 10.
8период приближения центра тяжести груза к оси вращения водила момент также сначала возрастает, затем убывает, но действует он теперь против направления вращения сателлита. Нулевые значения момент принимает при таких положениях, когда центр тяжести / груза 12 находится в плоскости, проходящей через оси вращения водила и ателлита
Вследствие неподвижности центрального колеса 9 плавно изменяющийся по величине и переменный по направлению вращающий момент от сателпита 10 передается через ось 11 водилу 8, а через муфту 7 и sait 6 - инструменту 5. Под действием этого момента зубья инструмента прижимаются к зубьям колеса, обеспечивая обработку одной из сторон профилей зубьев. При изменении направления действия момента на сателлит обрабатываются вторые стороны профилей других зубьев. Перемена обрабатываемых сторон зубьев происходит один раз за оборот сателлита -вокруг своей о си. Вследствие того, что число зубьев центрального колеса и сателлита отличается на один зуб, в процессе обработки происходит постепенное перемещение по кругу зон обработки первой и второй сторон профилей зу бьев. В итоге зубья получают без переключений двустороннюю обработку. Длительность такой последовательно- параллельной обработки при заданной частоте вращения инструмента уменьшается с увеличением массы и радиуса расположения центра тяжести груза сателлита и радиуса расположения оси сателлита.
Этот груз совершает сложное движение, при котором сила инерции определяется СУММОЙ векторов силы PR (от вращения rpyja вместе с водилом относительно оси колеса 9) и силы Р (от вращения груза вместе с сателлитом относительно оси 11). Однако от первой силы момент не возникает,поскольку линия действия ее и ось вращения водила пересекаются. Поэтому момент сил инерции, приложенный к водилу и характеризующий сопротивление вращению, определяется постоянным значением силы Рг и переменной величиной плеча Н по уравнению
М Г, Н; Р., т( Р,2 ; Н A cos (90 -) ; А г + R,
где Ою - угловая скорость колеса; m(2, масса груза 12 и радиус его
вращения;
Ј - угол поворота колеса 10 от начала отсчета (от продольной оси водила); R, г - радиусы колес 9 и 10.
Взаимосвязь этих уравнений с вра щением водила определяется следующими соотношениями: угол поворота водирла ы; угловая скорость водиR
ла СО в Юю После подстановок
получаем
5
М m ,gR,2 A
cos (90-lf-f-b
При установившемся равномерном IQ вращении водила амплитуда изменения момента сил инерции, величина постоянная, поэтому, момент равен
М с cos (90 - Ч1 -5)
к
Изменяется момент циклически с периодом в один оборот сателлита, принимая положительные и отрицательные значения. Момент сопротивления положительный, когда действует против направления вращения водила, и отрпца5
0
5
0
5
0
5
тельный, когда его направление совпадает с направлением вращения водила. Поэтому скорость вращения водила не остается постоянной даже при постоянной частоте врапдения: вращение замедляется при разных направлениях момента и скорости и ускоряется при совиа- цении их направлений. Что обусловлено тем,что водило разгоняв гея в период удаления груза 12 от осп колеса 9 и замедляется в период приближения к нему, Вращающий момент, передаваемый водиггу через колеса 1 и 5, по величине равен моменту сопротивления, а по направлению ему противоположен, злачнт он тоже циклически изменяется по чссинусоиде. Практически это означает, что маховик 4 работает то в приводном, то в тормозном режиме с переменной скоростью. Действительные колебания их скоростей невелики, но передача знакопеременного момента вызывает перемену зацепления зубьев шестерен 1 и 5 дважды за один оборот сателлита. Значит в периоды удаления груза от оси вращения водила зубья обрабатываемого колеса контактируют одной стороной, а в периоды приближения груза к оси вращения водила - другой. Если, например, радиусы колес 1,5,9 и 10 одинаковы, то при непрерывной непереключаемой работе привода станка на половине окружности колес 1 отрабатываются только набегающие стороны зубьев, а на другой половине - противоположные стороны.
Центробежные силы от груза 12 вызывают неуравновешенность станка, ко-торая частично устраняется с помощью I противовеса 13. Следует иметь в виду, что этим противовесом увеличивается момент инерции, вследствие чего умень-г шаются ускорения системы масс, связанных с водилом, и замедляется процесс приработки зубьев. Поэтому уравновешивание следует предусматривать частичное. Для уменьшения массы станка ю возможно его использование без противовеса.
Формула изобретения
Зубоотделочный станок „с инерционной связью, содержащий инерционные массы, одна из которых в виде маховиV
5
ка связана с ведущим валом, предназначенным для размещения обрабатываемого колеса, а ведомый вал предназначен для установки инструмента, о т- личающийся тем, что, с целью повышения производительности и качества обработки за счет исключения реверса привода станка, станок снабжен планетарным зубчатым механизмом, центральное колесо которого установлено неподвижно, а водило сателлита связано с ведомым валом, при этом на сателлите размещена другая инерционная масса в виде неуравновешенного груза, а число зубьев центрального колеса отличается от числа зубьев сателлита на нечетное число. I
| ЗУБООТДЕЛОЧНЫЙ СТАНОК С ИНЕРЦИОННОЙ СВЯЗЬЮ | 1970 |
|
SU429910A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
