00
ю ел ю ю
VI
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1703898A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820104A1 |
| Гидроинерционный трансформатор вращающего момента | 1989 |
|
SU1726877A1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| Инерционный трансформатор вращающего момента | 1989 |
|
SU1824506A1 |
| Зубоотделочный станок с инерционной связью | 1987 |
|
SU1563870A1 |
| Инерционный трансформатор | 1987 |
|
SU1477970A1 |
| Импульсный механизм | 1989 |
|
SU1698550A1 |
Использование: машиностроение. Сущность изобретения: инерционный трансформатор содержит два планетарных механизма с общим води л ом, неуравновешенные грузы, кинематически или посредством тормозного устройства связанные с сателлитами. При вращении установленного на входном валу 2 водила 4 каждый неуравновешенный груз 11 совершает планетарное движение и посредством винтового механизма и тормозного устройства поочередно соединяется с основными сателлитами 9 и 10, передавая на них импульсы момента, формирующие на центральных колесах 5 и 6 соответственно положительный и отрицательный вращающие моменты, которые, суммируясь на зубчатых колесах 23, 25, 26, 27 и 28 выпрямителя импульсов, передаются через двухпозиционную муфту 31 на выходной вал 3 и приводят последний в движение в сторону, совпадающую с направлением вращения входного вала 2 или в противоположную сторону в зависимости от включенной позиции муфты 31. 6 э.п. ф- лы, 4 ил.
Фие(
ts а
Изобретение относится к машиностро-вом пальца 19 с неуравновешенным грузом
ению и может быть использовано в приво-11 и поджимающий упругим элементом 20 к
дах различных машин в качествебарабану 16 томозную колодку 17, установтрансформатора вращающего момента.ленный на другом конце колодки ролик 21 и
Цель изобретения - повышение долго-5 закрепленный на водиле полукольцевой кувечности инерционного трансформаторалачок 22, предназначенный для разобщения
путем снижения удельных нагрузок на за-рабочих поверхностей тормозной колодки и
клииивающих элементах и повышения плав- барабана,
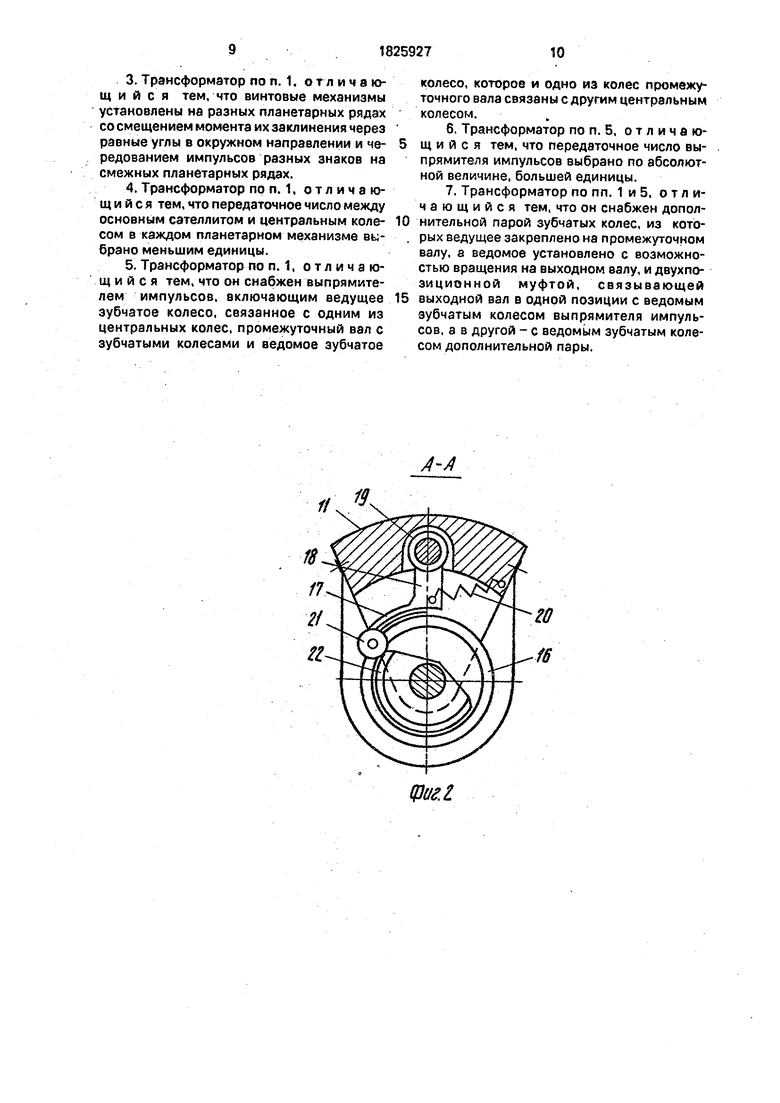
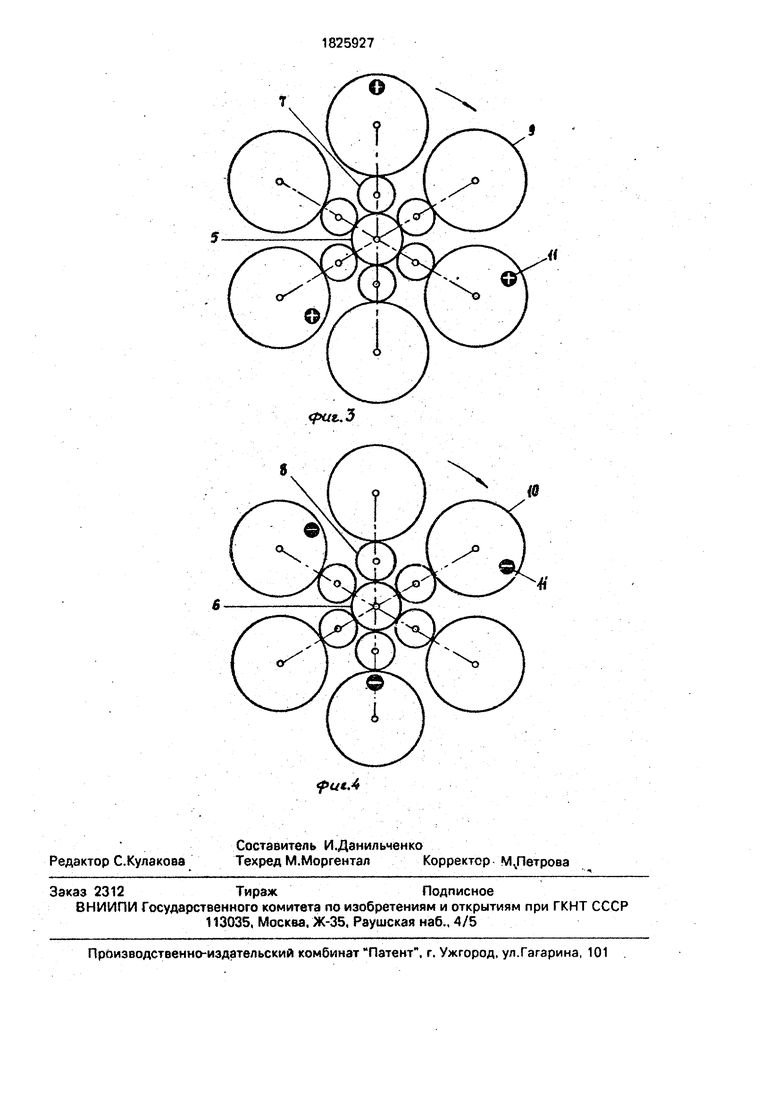
ности хода трансформатора, увеличениеПри этом неуравновешенный груз 11 в экономичности и коэффициента транс-1® осевой плоскости имеет П-образную форму формации путем использования энергиии установлен с возможностью охвата бара- обратного импульса и расширение функци-бана 16 своими опорами с обеих сторон, опальных возможностей трансформатораобразуя стенками герметичную камеру для путем обеспечения разностороннего вра-тормозного устройства, щения выходного вала.№ Винтовые механизмы установлены на На фиг, 1 схематично изображен инер-разных планетарных рядах со смещением ционный трансформатор; на фиг. 2 - сече-момента их заклинения через равные углы в ние А-А на фиг. 1; на фиг. 3 и 4 - схемыокружном направлении и чередованием им- соответственно первого и второго плане-пульсов разных знаков на смежных планетарных механизмов и расположение грузов20 тарных рядах.
по их планетарным рядам в стоповом режи-Передаточное число между основным ме.сателлитом и центральным колесом в каж- Инерционный трансформатор содер-дом планетарном механизме выбрано мень- жит корпус 1, размещенные в нем входнойшим единицы, например, равным 0,5, а 2 и выходной 3 валы и два планетарных25 трансформатор снабжен выпрямителем им- механизма с установленным на входном ва-пульсов, включающим ведущее зубчатое колу 2 общим для них водилом 4. Каждый пла-лесо 23, связанное с центральным колесом нетарный механизм включает6 второго планетарного механизма, проме- соответственно центральное колесо 5 и 6,жуточный вал 24 с зубчатыми колесами 25 и сцепленные с ними промежуточные сател-30 26, промежуточное зубчатое колесо 27 и ве- литы 7 и 8, взаимодействующие с последни-домов зубчатое колесо 28, связанное с цен- ми основные сателлиты 9 и 10,тральным колесом 5 первого планетарного установленные на водиле 4 соосно парами,механизма. Причем передаточное число вы- принадлежащими в каждой паре разнымпрямителя импульсов выбрано с абсолют- планетарным механизмам, и установлен-35 ной величиной больше единицы, ные на осях основных сателлитов неуравно-В трансформаторе применены допол- вешенные грузы 11, каждый из которыхнительная пара зубчатых колес 29 и 30, из кинематически связан с соответствующимкоторых ведущее колесо 29 закреплено на сателлитом 9 первого планетарного меха-промежуточном валу 24, а ведомое установ- низма и посредством тормозного устройст-40 лено с возможностью вращения на выход- ва с соответствующим сателлитом 10 ном валу 3 и двухпозиционная муфта 31, второго планетарного механизма.связывающая выходной вал 3 в одной пози- Кинематическзя связь неуравновешен-ции с ведомым зубчатым колесом 28 выпря- ного груза 11с сателлитом 9 первого плане-мителя импульсов, а в другой - с ведомым тарного механизма выполнена посредством45 зубчатым колесом 30 дополнительной пары, винтового механизма, включающего уста-Инерционный трансформатор работает новленный на сателлите полый винт 12, а наследующим образом, грузе закрепленную посредством упругихПри вращении установленного на вход- элементов 13 гайку 14. Причем сателлит 9ном валу 2 водила 4 и наличии момента установлен с возможностью осевых переме-50 сопротивления на выходном валу 3, а также щений между гайкой 14 и упором 15, закреп-при включенной в одну из рабочих позиций ленным на водиле.муфте 31 промежуточные сателлиты 7 и 8, Тормозное устройство, связывающееобкатывая соответствен но центральные ко- неуравновешенный груз 11 с сателлитом 10леса 5 и 6, приводят в движение основные второго планетарного механизма, включает55 сателлиты 9 и 10 с тормозным барабаном 16, соединенный с сателлитом барабан 16, вза-а неуравновешенные грузы 11 под действи- имодействующую с наружной поверхно-ем центробежных сил, стремясь занять веретью последнего тормозную колодку 17,хнее наиболее удаленное от центра жестко закрепленный на одном ее концетрансформатора положение, взаимодейст- рычаг 18, связанный шарнирно посредст-вуют поочередно с сателлитами 9 и 10 соответственно через посредство винтовых механизмов и тормозных устройств, передавая на сателлиты импульсы моментов, которыми формируются кэ центральных колесах 5 и б соответственно положительный и отрицательный вращающие моменты.
Когда двухпозиционная муфта 31 находится в первой рабочей позиции, как показано на фиг. 1, тогда положительный вращающий момент, формируемый на центральном колесе 5. передается от него через зубчатое колесо 28 и муфту 31 на выходной вал 3 напрямую, а отрицательный вращающий момент, формируемый на центральном колесе 6, передается от него на выходной вал 3 через зубчатые колеса 23,25,26, 27 и 28 и муфту 31, преобразуясь на них в положительный вращающий момент и суммируясь с моментом, передаваемым от центрального колеса 5. Под действием суммарного положительного момента выходной вал 3 приобретает движение в сторону, совпадающую с направлением вращения входного вала 2.
Когда муфта 31 находится во второй рабочей позиции, тогда отрицательный вращающий момент от центрального колеса 6 передается через зубчатые колеса 23, 25 и 29, 30 и муфту 31 на выходной вал 3 без изменения своего знака, а положительный вращающий момент от центрального колеса 5 передается через зубчатые колеса 28. 27, 26 и 29, 30, преобразуясь на них в отрицательный вращающий момент и суммируясь с моментом, передаваемым от центрального колеса 6. Под действием суммарного отрицательного вращательного момента выходной вал 3 приобретает движение в противоположную сторону относительно направления вращения входного вала 2.
При этом включение и выключение винтовых механизмов и тормозных устройств в определенные моменты времени происходит автоматически следующим образом.
Включение винтового механизма, связывающего неуравновешенный груз 11 сса- теллитом 9 производится при нахождении груза в верхнем положении после наворачи- вания гайки 14 на винт 12 и перемещения сателлита 9 в осевом направлении до закли- нения с гайкой 14, вследствие чего осуществляется передача положительного импульса момента от груза 11 на сателлит 9 и обеспечивается перемещение груза из верхнего в нижнее положение.
Груз, пройдя нижнее положение, под действием центробежной силы снижает скорость вращения, вследствие чего гайка 14 расклинивается с сателлитом 9, отсоединяя груз от сателлита.
Включение тормозного устройства, соединяющего груз 11с сателлитом 10,проис- ходит после прохода грузом нижнего положения в момент сбегания ролика 21 из 5 полукольцевого кулачка 22. Вначале тормозная колодка 17 прижимается к поверхности барабана центробежной силой и усилием упругого элемента 20, создавая небольшой мймент трения. Затем в связи со
стремлением груза определить барабан 16 он через посредство рычага 18 блокирует колодку 17 на барабане 16 большим моментом трения, обеспечивающим передачу отрицательного импульса момента от груза 11
5 на сателлит 10 с перемещением груза из нижнего в верхнее положение.
С приходом груза 11 в верхнее положение он ускоряет вращение, вследствие чего тормозная колодка 17 разблокируется с ба0 рабаном 16, а ролик 21, набегая на полукольцевой кулачок 22, разобщает рабочие поверхности колодки и барабана. Далее процесс повторяется. Наличием больших площадей контакта
5 рабочих поверхностей в винтовых механизмах и тормозных устройствах значительно снижаются удельные нагрузки в заклинивающихся элементах и этим самым повышается надежность и срок службы звеньев,
0 работающих в жестком динамическом режиме.
Последовательность включения винтовых механизмов и тормозных устройств по планетарным рядам и чередование дейст5 вия импульсов разных знаков на смежных планетарных рядах-можно определить по схемам расположения грузов 11 на сателлитах разных планетарных рядов на первом и втором планетарных механизмах, показан0 ных соответственно на фиг. 3 и фиг, 4,
Благодаря смещению начала действия одноименных импульсов момента на равные углы в окружном направлении на разных планетарных рядах и чередованию
5 разноименных импульсов на смежных планетарных рядах обеспечивается высокая плавность вращения выходного вала.
Выбор передаточного числа между основным сателлитом и центральным колесом 0 в каждом планетарном механизме равным половине единицы обусловлен созданием условий для более полной передачи отрицательного импульса момента от груза 11 на сателлит 10 и обеспечением необходимых
5 параметров выходной моментной характеристики в диапазоне всех передаточных чисел трансформатора. При этом сателлиты 9 и 10 в стоповом режиме приобретают запас положительной угловой скорости, чтобы при наборе оборотов выходного вала она, снижаясь на сателлитах 10, стремилась к нулю или становилась отрицательной допустимых значений, обеспечивающих условия для передачи отрицательных импульсов от грузов 11 на сателлиты 10.
Выбор передаточного числа выпрямителя импульсов с абсолютной величиной большей единицы обусловлен повышением коэффициента трансформации вращающего момента.
С переходом трансформатора в режим динамической муфты гайки 14 винтовых механизмов прекращают вращение относительно винтов 12, вследствие чего положительный вращаюашй момент формируется нз центральном колесе 5 первого планетарного механизма импульсами мо- ментэ поповины грузов 11, соединенными с основными сателлитами 9, а отрицательный вращающий момен г не формируется на цен- тральном колесе 6 второго планетарного механизма из-за нахождения другой половины грузов в верхнем положении. При этом сателлиты 10 второго планетарного механизма взаимодействуют с промежуточными сателлитами 8 вхолостую.
Со снижением момента сопротивления на выходном валу 3 в режиме муфты автоматически уменьшается количество грузов 11, передающих импульсы момента на сателлиты 9 и изменяется их положение , плав- но регулируя величину выходного вращающего момента.
При торможении выходного вала 3 снижением частоты вращения входного вала 2 центральное колесо 5 будет стремиться опередить водило 4, вследствие чего винты 12 будут выворачиваться из гаек 14 и прижимать сателлиту 9 к упорам 1Ь, Ьлокируя зубчатые колеса первого планетарного механизма моментом трения, создаваемого сателлитами 9 и упорами 15 и обеспечивающего передачу тормозного момента от входного вала на выходной вал.
Инерционный трансформатор наиболее эффективно работает с применением его в сочетании с двигателем (не показан), имеющим регулируемую частоту вращения вала, например с двигателем внутреннего сгорания, обеспечивая высокий коэффициент трансформации момента, равный 10 и больше, и не вызывая перегрузок двигателя при переходах трансформатора из одного режима работы в другой.
Такое выполнение инерционного трансформатора позволяет за счет уменьшения удельных динамических нагрузок на рабочих поверхностях заклинивающих устройств, соединяющих неуравновешенные грузы с сателлитами, повысить его долговеч0
ность за счет использования энергии как прямого, так и обратного импульса момента на формирование выходного вращающего момента - повысить экономичность и коэффициент трансформации момента, а за счет обеспечения разностороннего вращения выходного вала - расширить функциональные возможности и область применения трансформатора.
Формула изобретения
два планетарных механизма с установленным на входном валу общим водилом, каждый из которых включает центральное колесо, у первого планетарного механизма кинематически связанное с выходным валом, сцепленные с центральным колесом промежуточные сателлиты и предназначенные для взаимодействия с последними основные сателлиты, установленные на водиле соосно парами, принадлежащими в
каждой паре разным планетарным-механиз- мам, и установленные на оси основных сателлитов неуравновешенные грузы, каждый из которых кинематически связан с сателлитами первого планетарного механизма и посредством тормозного устройства с сателлитами второго планетарного механизма, отличающийся тем. что основные сателлиты первого планетарного механизма установлены на водиле с возможностью осевых перемещений, кинематическая связь каждого неуравновешенного груза г сателлитом первого планетарного механизма выполнена посредством винтового механизма, гайка которого упруго закреплена на одном из последних, а полый винт на другом, а тормозное устройство представляет собой соединенный с сателлитом барабан, взаимодействующую с наружной поверхностью последнего тормозную
колодку, жестко закрепленный на одном ее конце рычаг, связанный шарнирно посредством пальца с неуравновешенным грузом и поджимающий упругим элементом к барабану тормозную колодку, установленный на
другом ее конце ролик, закрепленный на водиле полукольцевой кулачок, предназначенный для разобщения рабочих поверхностей тормозной колодки и барабана.
колесо, которое и одно из колес промежуточного вала связаны с другим центральным колесом.
7,Трансформатор по пп. 1 и 5. отличающийся тем, что он снабжен дополнительной парой зубчатых колес, из кото- рых ведущее закреплено на промежуточном валу, а ведомое установлено с возможностью вращения на выходном валу, и двухпо- зиционной муфтой, связывающей
выходной вал в одной позиции с ведомым зубчатым колесом выпрямителя импульсов, а в другой - с ведомым зубчатым колесом дополнительной пары.
фиг. 2.
| ШЕНТНО-ТЕХЙИ';Е:НДЯБИБЛИОТЕКАЮ. П. Мурзин | 0 |
|
SU302539A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Инерционный трансформатор | 1987 |
|
SU1477970A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
