Изобретение относится к измерительной технике и может быть использовано для измерения давления с внесением температурной поправки.
Известна система компенсации температурной погрешности измерителей давления, в которой частоту компенсационного датчика, зависящую от температуры, делят на частоту рабочего датчика, зависящую от измеряемого параметра и от температуры (а.с. N 155971), что компенсирует аддитивную составляющую температурной погрешности.
К числу недостатков этой системы следует отнести необходимость введения дополнительного датчика температуры и отсутствие компенсации мультипликативной составляющей температурной погрешности.
Известен алгоритмический метод повышения точности, основанные на использовании эталонного сигнала и обработке результатов в ЭВМ (см.Боднер В.А. Приборы первичной информации. М.: Машиностроение, 1981, с.130).
При этом сигнал об измеряемом параметре и эталонный сигнал подают в измерительную систему в несколько тактов, а результат измерений направляют в вычислительное устройство ЭВМ.
К числу недостатков этого метода следует отнести то, что процесс измерений, осуществляемых в несколько временных тактов, сам оказывает дестабилизирующее влияние, введение ЭВМ ухудшает массогабаритные характеристики устройства и значительно повышает цену.
Наиболее близким к предлагаемому техническому решению является система измерения давления (патент США N 4322977, кл. G 01 R 9/12), содержащая датчик давления (температуры), включающий в себя преобразователь давления с нормированным аналоговым выходом, преобразователь температуры с нормированным аналоговым выходом, первый аналого-цифровой преобразователь, вход которого соединен с выходом преобразователя давления, второй аналого-цифровой преобразователь, вход которого соединен с выходом преобразователя температуры, и корректирующую матрицу, первая часть которой соединена с выходами первого аналого-цифрового преобразователя, вторая - с выходами второго аналого-цифрового преобразователя.
К числу недостатком решения, защищенного патентом США N 4322977, следует отнести то, что с выхода корректирующей матрицы получают сигнал полного давления. Это обуславливает или большую избыточность аппаратурной части, или накладывают более высокие требования на точность составляющих элементов.
Целью изобретения является повышение точности измерения за счет снижения погрешности выходного сигнала, включающей в себя температурную погрешность, погрешность нелинейности, а также остаточную погрешность нормирования аналогового сигнала по давлению, при одновременном уменьшении массогабаритной характеристики системы.
Для достижения цели в систему измерения давлений дополнительно введены цифроаналоговый преобразователь, входы которого соединены с выходами корректирующей матрицы, и аналоговый фильтр, выход которого является выходом системы измерения давления.
Аналоговый сумматор, содержащую корректирующую матрицу, соединен своим первым входом с выходом преобразователя давления, вторым входом - с выходом цифроаналогового преобразователя, причем выход аналогового сумматора соединен с входом аналогового фильтра. В корректирующую матрицу введены заранее значения поправок, определяемых предварительно при калибровке системы, а весовой коэффициент по второму входу сумматора подобран таким образом, чтобы весь диапазон выходного сигнала цифроаналогового преобразователя был задействован для отображения поправок.
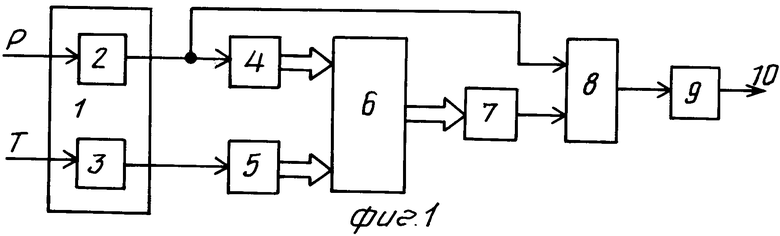
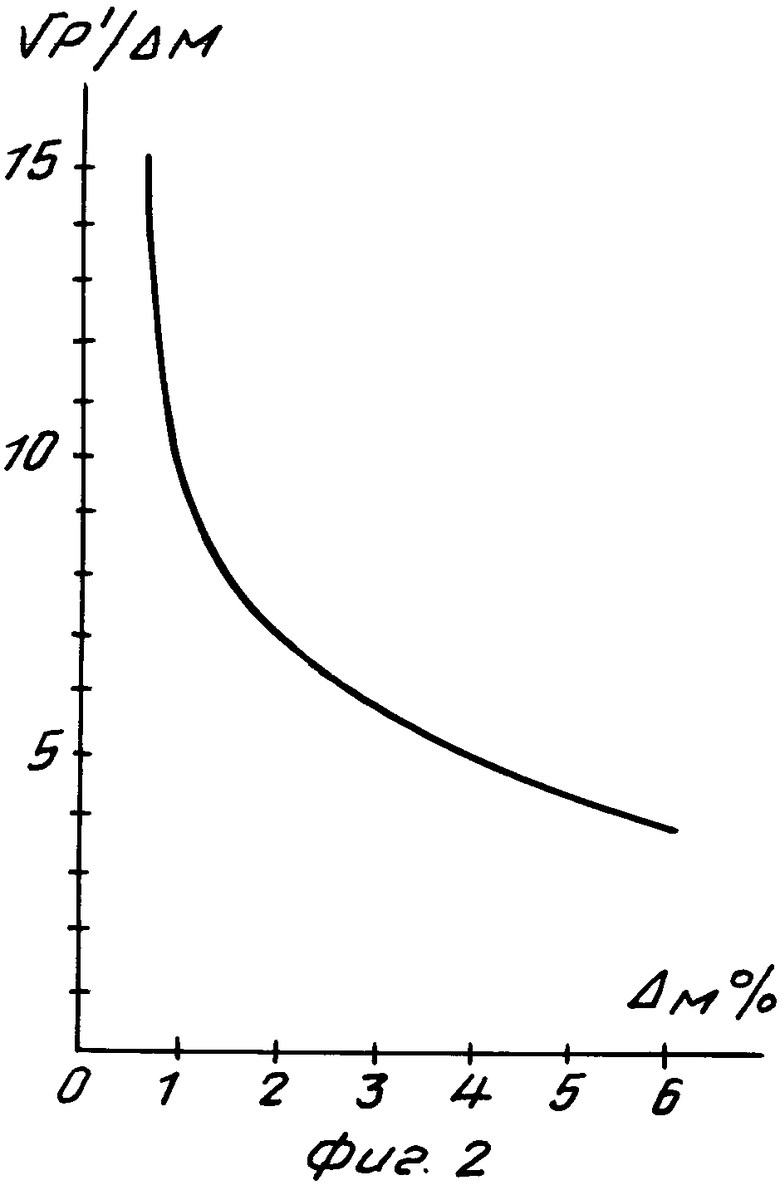
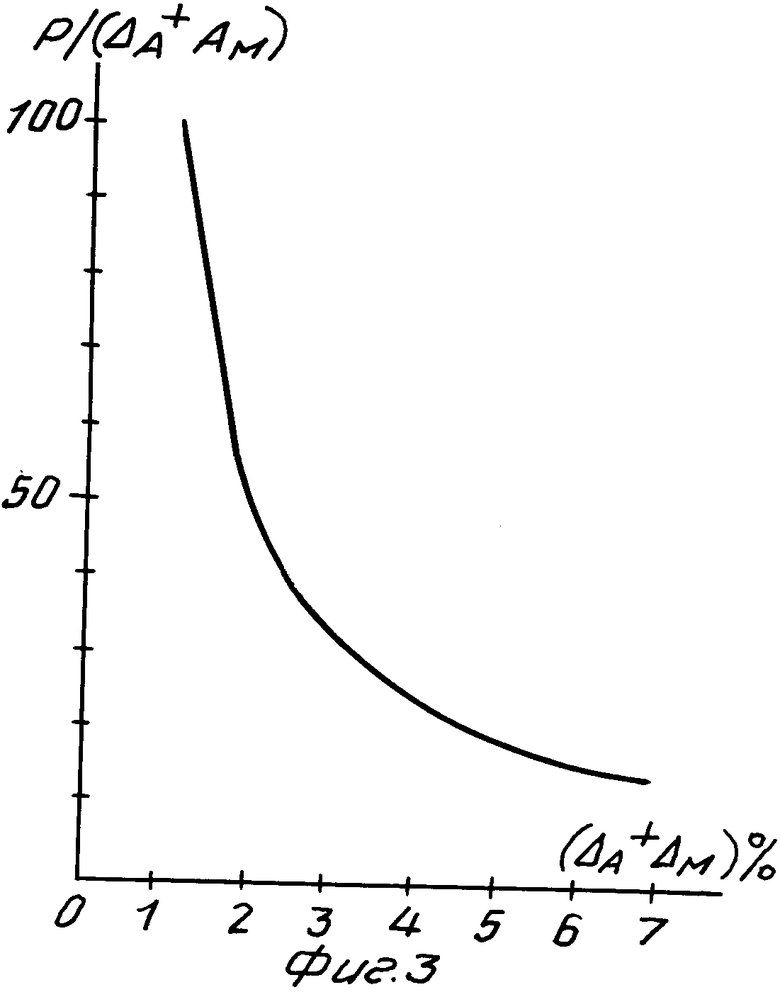
На фиг.1 представлена функциональная схема системы измерения давления с аналоговым выходом; на фиг.2,3 представлены аналитические кривые повышения точности системы в сравнении с прототипом.
Устройство для измерения давления содержит датчик давления температуры 1, включающий в себя преобразователь 2 давления с нормированным выходом, преобразователь 3 температуры с нормированным аналоговым выходом, первый аналого-цифровой преобразователь 4, вход которого соединен с выходом преобразователя давления, второй аналого-цифровой преобразователь 5, вход которого соединен с выходом преобразователя температуры, корректирующую матрицу 6, первая часть входов которой соединена с выходами первого аналого-цифрового преобразователя, вторая часть - с выходами второго аналого-цифрового преобразователя, для повышения точности компенсации интегральной погрешности датчика давления, включающей в себя и температурную погрешность, введены цифроаналоговый преобразователь 7, входы которого соединены с выходами корректирующей матрицы, аналоговый сумматор 8, аналоговый фильтр 9, выход которого является выходом 10 системы. Первый выход аналогового сумматора 8 соединен с выходом преобразователя давления, второй - с выходом цифроаналогового преобразователя, а выход соединен с входом аналогового фильтра. В корректирующую матрицу 6 введены значения поправок, соответствующих интегральной погрешности датчика давления в поле рабочих температур и давлений, определяемых при калибровке системы.
Весовой коэффициент по второму входу сумматора выбирают таким образом, чтобы весь диапазон выходного сигнала цифроаналогового преобразователя был использован для отображения поправок.
Устройство для измерения давления работает следующим образом.
Выходные сигналы с датчика давления/температуры 1 представляют собой аналоговые сигналы в виде нормированных напряжений постоянного тока соответственно давлению - выход устройства 2 и по температуре - выход устройства 3.
Выходной сигнал устройства 2 подается на аналого-цифровой преобразователь 4, по выходу которого формируется цифровой код, пропорциональный его входному напряжению.
Соответственно на выходе аналого-цифрового преобразователя 5 формируется цифровой код по температуре.
Выходной сигнал преобразователя 2 в виде нормированного напряжения одновременно подается на сумматор 8. Цифровые коды, сформированные АЦП 4 и 5, подаются на адресные входы нормирующей матрицы 6. В матрице 6 размещают массив поправок, где каждая поправка соответствует определенному сочетанию цифровых кодов АЦП - 4 и 5. Выходным сигналом матрицы 6 является код поправки, пропорциональный напряжению, которое необходимо прибавить (или отнять) к выходному сигналу устройства 2 (нескорректированного напряжения по давлению), чтобы скомпенсировать интегральную погрешность по выходу устройства 2.
Выходной сигнал матрицы 6 в виде цифрового кода подают на биполярный преобразователь 7, выходным сигналом которого является значение поправки в виде напряжения постоянного тока.
При этом для получения значения поправок с положительными и отрицательными знаками корректирующая матрица 6 соответственно кодируется положительными или отрицательными двоичными кодами в цифровом виде.
Выходной сигнал цифроаналогового преобразования 7 подается на второй вход сумматора 8, где происходит алгебраическое сложение поправок с выходным сигналом устройства 2.
Скомпенсированный сигнал по давлению имеет вид напряжения постоянного тока, которое линейно зависит от входного сигнала по давлению всего устройства.
Работа всего устройства происходит под управлением схемы синхронизации, включающей в себя устройство выборки и хранения (УВХ) по выходу устройства 2, УВХ устройства 3 и УВХ устройства 8, а также тактовую схему управления всеми вышеперечисленными УВХ, аналого-цифровыми преобразователями 4 и 5 и цифроаналоговым преобразователем 7 (на схеме не показано).
Работа устройства во времени осуществляется следующим образом. По команде схемы управления фиксируется текущее значение напряжения на выходах УВХ по выходам устройств 2,3,8, затем запускаются АЦП 4 и 5 с известным времени преобразования. Через интервал времени, необходимый для формирования выходных сигналов АЦП 4 и 5, выходного сигнала матрицы 6, формирования напряжения поправки по выходу цифроаналогового преобразователя 7 и выходного сигнала сумматора 8, снова включается УВХ по выходу устройств 2,3,8 и сигнал в виде напряжения подается на выход 10 устройства через фильтр 9 нижних частот. Фильтр 9 нижних частот необходим для уменьшения ошибок дискретизации выходного сигнала всего устройства и выполняется как единое целое с УВХ по выходу устройства 8. После завершения этого цикла тактирующая схема повторяет вышеописанный процесс.
Предложенное конструктивное решение позволяет компенсировать погрешность выходного сигнала преобразователя 2 независимо от природы возникновения, а именно компенсировать погрешность нелинейности, а также систематические погрешности устройств 2,3,4,5,7,8 и 9 при условии выполнения системы в виде датчика, совмещенного с данной электронной схемой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ДАВЛЕНИЯ | 1991 |
|
RU2023996C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
RU1612956C |
| Параллельно-последовательный аналого-цифровой преобразователь | 1985 |
|
SU1305851A1 |
| Устройство для измерения температуры | 1986 |
|
SU1377609A1 |
| МНОГОКАНАЛЬНОЕ КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ ПРИЕМНОЕ УСТРОЙСТВО С ДВУХЗВЕННОЙ СЕЛЕКЦИЕЙ ДВИЖУЩИХСЯ ЦЕЛЕЙ (ВАРИАНТЫ) | 2006 |
|
RU2327187C2 |
| Электроразведочная станция | 1987 |
|
SU1469489A1 |
| СПОСОБ КАЛИБРОВКИ МАТРИЧНОГО ФОТОПРИЕМНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
RU1314800C |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1987 |
|
RU2226715C2 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2004 |
|
RU2276833C1 |
| СПОСОБ ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ УГЛА | 2012 |
|
RU2488958C1 |
Использование: изобретение относится к приборостроению и может быть использовано при разработке прецизионных высокоскоростных средств измерения давления с широким диапазоном рабочих температур. Сущность изобретения: с целью повышения точности в устройство, содержащее датчик давления температуры, включающий в себя преобразователь давления с нормированным аналоговым выходом, преобразователь температуры с нормированным аналоговым выходом, первый аналого-цифровой преобразователь, вход которого соединен с выходом преобразователя давления, второй аналого-цифровой преобразователь, вход которого соединен с выходом преобразователя температуры, корректирующую матрицу, первая часть входов которой соединена с выходами первого аналого-цифрового преобразователя, вторая часть - с выходами второго аналого-цифрового преобразователя, введены цифроаналоговый преобразователь, входы которого соединены с выходами корректирующей матрицы, аналоговый фильтр, выход которого является выходом системы, и аналоговый сумматор, первый вход которого соединен с выходом преобразователя давления, второй - с выходом цифроаналогового преобразователя, а выход соединен с входом аналогового фильтра. При этом в корректирующую матрицу введены значения поправок, соответствующих интегральной погрешности датчика давления в поле рабочих температур и давлений, предварительно определяемых при калибровке системы, а весовой коэффициент по второму входу сумматора выбирают таким образом, чтобы весь диапазон выходного сигнала цифроаналогового преобразователя был использован для отображения поправок. 3 ил.
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ С АНАЛОГОВЫМ ВЫХОДОМ, содержащее датчики давления и температуры, соединенные соответственно с преобразователем давления с нормированным аналоговым выходом и преобразователем температуры с нормированным аналоговым выходом, первый аналого-цифровой преобразователь, вход которого соединен с выходом преобразователя давления, второй аналого-цифровой преобразователь, выход которого соединен с выходом преобразователя температуры, корректирующую матрицу, первая часть входов которой соединена с выходами первого аналого-цифрового преобразователя, вторая - с выходами второго аналого-цифрового преобразователя, отличающаяся тем, что в него введены цифроаналоговый преобразователь, аналоговый фильтр и аналоговый сумматор, первый вход которого соединен с выходом преобразователя давления с нормированным аналоговым выходом, второй вход - с выходом цифроаналогового преобразователя, а выход - с входом аналогового фильтра, выход корректирующей матрицы соединен с информационным входом цифроаналогового преобразователя.
| Патент США N 4322977, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
