Изобретение относится к области автоматики и вычислительной техники, а именно к построению измерительных элементов систем цифрового управления, формирующих в цифровом виде информацию о текущих угловых положениях подвижных частей объекта регулирования. Такие преобразующие элементы в настоящее время получили наименование "Цифровые преобразователи угла" (ЦПУ).
Изобретение обеспечивает амплитудное цифровое преобразование угла следящего типа повышенной точности при использовании 2-фазных датчиков угла (ДУ) и функциональных цифроаналоговых преобразователей (ФЦАП) выходных сигналов ДУ, зависимости которых могут отличаться от желательных синусно-косинусных функций (квазисинусоидальные ДУ и ФЦАП). Данное изобретение целесообразно использовать при разработке новых высокоточных ЦПУ и при модернизации существующих. Во втором случае модернизируемый ЦПУ дополняется внешним корректирующим каналом, суммирующим устройством и соответствующими цепями связи.
Известен способ цифрового преобразования угла, при использовании которого негативное влияние квазисинусоидальности ДУ на точность преобразования основного канала в определенной степени нейтрализуется сигналами функциональных цифроаналоговых преобразователей внутреннего корректирующего канала, поступающими в цепь рассогласования основного канала преобразования [1]. Достижимая точность ЦПУ, построенного таким образом, ограничивается составляющими погрешности преобразования основного канала: от нарушения ортогональности ДУ; от неравенства коэффициентов трансформации по фазным выходам ДУ; от наличия четных гармоник ДУ и нечетных гармоник с порядком выше девятого. Следует также отметить, что такой способ не применим для модернизации преобразователей, в которых отсутствует доступ к узлам подключения входов и выходов корректирующего канала.
В работе [2] предложен способ цифрового преобразования угла, наиболее близкий к предлагаемому изобретению, в котором повышение точности преобразования обеспечивается внешним корректирующим каналом. При этом выходной код устройства образуется суммированием выходного кода основного канала преобразования и предварительно сформированного соответствующего массива значений выходного кода внешнего корректирующего канала.
Основной канал преобразования устройства, реализующего такой способ, содержит первый датчик угла и преобразователь его выходных сигналов в первый код угла (N1). Внешний корректирующий канал содержит: второй датчик угла и преобразователь его выходных сигналов во второй код угла (N2); блок вычитания кодов N1 и N2; анализатор спектра; блок синтеза поправок к коду N1. Выходной код устройства формируется на выходе сумматора выходных кодов основного и корректирующего каналов. Код коррекции образуется алгоритмической обработкой значений кодов N1 и N2 с учетом того, что механически соединенные датчики угла основного и корректирующего каналов целенаправленно обладают "различными спектрами пространственных погрешностей".
Однако, несмотря на алгоритмическую сложность формирования массива кодов коррекции и соответственно значительную развитость используемых аппаратных средств, при реализации сохраняется ограничение по достигаемой точности преобразования. Уровень ограничения определяется: несовершенством алгоритматики (исключение величин второго порядка малости); различием инструментальных составляющих погрешности первого и второго датчиков угла; погрешностью функциональных аналого-цифровых преобразователей выходных сигналов первого и второго ДУ, а также погрешностью метрологического оборудования, используемого для задания «опорных» угловых положений роторов первого и второго ДУ при формировании кодов коррекции.
Устройство преобразования с добавленными блоками (п.2 формулы изобретения) формирует контрольный сигнал S, который косвенно указывает на необходимость проведения операций по повторному формированию массива кодов коррекции значений N1.
Реализация алгоритма прототипа требует применения внешнего метрологического оборудования и проведения соответствующих монтажных работ. Отсюда выполнение операций по формированию кодов коррекции требует значительных временных затрат. При эксплуатации их выполнение, в подавляющем большинстве случаев, должно сопровождаться выводом ДУ из состава объекта регулирования на длительное время.
Новый способ цифрового преобразования угла в равных условиях обеспечивает повышенную точность преобразования. При этом также используется внешний корректирующий канал и внешнее суммирование выходных кодов основного и корректирующего каналов. Однако задача решается при гораздо меньшем объеме аппаратных средств, требуемых для реализации корректирующего канала. Снятие требования по использованию дополнительного метрологического оборудования сокращает временные затраты по формированию массива кодов коррекции на стадии производства и при эксплуатации. Указанные преимущества определяются разработкой соответствующего алгоритма формирования массива кодов коррекции внешнего корректирующего канала.
Для решения поставленной задачи в предлагаемом способе цифрового преобразования угла, основанном на том, что значения выходного кода основного канала амплитудного цифрового преобразования угла следящего типа суммируют с соответствующими предварительно полученными значениями выходного кода внешнего корректирующего канала, формируемыми при вращении ротора датчика угла основного канала преобразования с постоянной угловой скоростью, равной приблизительно половине ее максимального рабочего значения, путем аналого-цифрового преобразования тахометрического сигнала основного канала преобразования, интегрирования переменной составляющей преобразованного тахометрического сигнала и регистрации проинтегрированного сигнала.
Указанное значение скорости выбрано из условия того, что оно обеспечивает функционирование устройства без явного проявления его фильтрующих свойств, но при этом момент инерции роторной части устройства уже в достаточной мере способствует стабилизации угловой скорости вращения ротора ДУ на время формирования выходного кода внешнего корректирующего устройства.
Отметим, что задачу контроля текущей погрешности всех ЦПУ, в том числе и ЦПУ прототипа, необходимо решать прямыми измерениями в составе основной цифровой системы регулирования путем задания «реперных» углов и последующего вычисления соответствующих значений погрешности преобразования. По результатам анализа прямых измерений, а не косвенных, как у прототипа, принимается решение о работе в штатном режиме с существующим массивом кодов коррекции или назначении повторного режима формирования массива кодов коррекции.
Формирование более точных (по отношению к прототипу) кодов коррекции и, следовательно, достижение более точного преобразования угла в код, базируется на использовании следующих положений теории построения ЦПУ следящего типа [3]. Основной канал предлагаемого цифрового преобразования относится к системе регулирования с обратной связью с двумя последовательно включенными аналоговым и цифровым интеграторами, т.е. обеспечивается астатизм второго порядка. При этом выходной сигнал аналогового интегратора (с определенной точностью) характеризует текущее значение угловой скорости вращения ротора датчика угла, т.е. его можно рассматривать и использовать как тахометрический выход устройства [1]. Отсюда преобразование угла в код при постоянной, угловой скорости вращения ротора датчика угла (dα/dt=const, где α - угловое положение ротора ДУ) обеспечивает соответствующее постоянное по значению выходное напряжение (UCKOP) на тахометрическом выходе устройства при использовании синусоидальных ДУ И ФЦАП. Квазисинусоидальность датчика угла, а в общем случае и функциональных цифроаналоговых преобразователей основного канала, приводит к появлению погрешности преобразования угла в код и в указанных условиях - к нарушению соответствия значения угловой скорости (dα/dt) и напряжения тахометрического выхода (UCKOP). При этом в характере изменения по углу (по времени) переменной составляющей тахометрического сигнала UCKOP содержится информация о текущей погрешности преобразования угла в код. Искомый сигнал, характеризующий указанную погрешность в цифровом виде, формируется по определенному алгоритму внешним корректирующим каналом. Очевидно, что суммирование такого корректирующего кода (NKOPP) с выходным кодом основного канала (NHAЧ) позволяет повысить конечную точность преобразования предлагаемого устройства.
Для формирования требуемого массива кодов коррекции выполняют следующие операции:
- обеспечивают вращение ротора датчика угла с постоянной угловой скоростью, равной приблизительно половине ее максимального рабочего значения, на время прохождения, по крайней мере, двух полных электрических периодов датчика угла;
- измеряют время (Т) прохождения ротором датчика угла первого указанного полного электрического периода, где Т - временной интервал между двумя последовательно фиксируемыми моментами формирования нулевых значений выходного кода NHAЧ основного канала преобразования;
- преобразуют измеренное значение Т в цифровой эквивалент NCC, который в цифровом виде характеризует среднюю скорость прохождения первого (второго) полного электрического периода и регистрируется первым запоминающим устройством;
- преобразуют изменяющийся в пределах следующего электрического периода тахометрический сигнал основного канала преобразования в массив двоичных кодов NАЦП(NHAЧ), который адресно с опорой на соответствующие значения кода NHAЧ регистрируют в свободной области первого перепрограммируемого запоминающего устройства в виде массива двоичных кодов NАЦП(NHAЧ);
- вычисляют массив кодов, характеризующих переменную составляющую тахометрического сигнала, путем формирования массива разностных кодов ΔN1(NHAЧ)=NАЦП(NHAЧ)-NCC с помощью первого цифрового сумматора;
- интегрируют функцию, заданную массивом ΔN1(NHAЧ), а результат интегрирования, уже в виде соответствующего массива кодов коррекции NКОРР(NHAЧ.), регистрируют вторым (энергонезависимым) запоминающим устройством с опорой на соответствующие значения кода NHAЧ.
Сформированные таким образом составляющие массива кодов коррекции NКОРР(NHAЧ) используют в штатном режиме преобразования для формирования точного (конечного) значения выходного кода устройства (NKOH). При этом использование составляющих массива кодов коррекции с полной разрядностью не является обязательным условием. Выбор количества используемых разрядов определяется технической целесообразностью.
Выполнение перечисленных операций осуществляется под воздействием внешнего управляющего сигнала УПР, который обеспечивает формирование массива кодов коррекции в разовом (подготовительном) режиме и последующее использование указанного массива в штатном режиме.
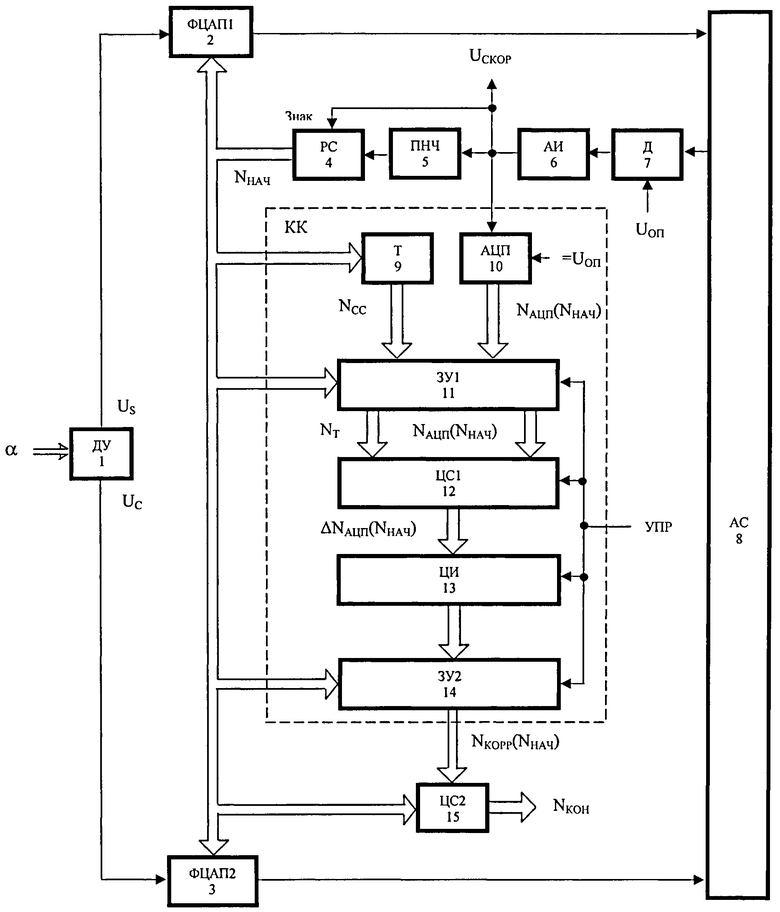
На чертеже представлена блок-схема устройства, реализующего предлагаемый способ, включающая в себя: основной канал преобразования с входящими блоками; внешний корректирующий канал с входящими блоками (КК) и сумматор выходных кодов основного и корректирующего каналов.
В основной канал входят: амплитудный аналого-цифровой преобразователь углового положения ротора 2-фазного датчика угла (ДУ) 1 в значение начального кода NHAЧ, состоящий из первого и второго четырехквадрантных функциональных цифроаналоговых преобразователей (ФЦАП1 и ФЦАП2) 2 и 3, аналогового сумматора (АС) 8, демодулятора с фильтром (Д) 7, аналогового интегратора (АИ) 6, преобразователя выходного напряжения АИ в частоту следования импульсов (ПНЧ) 5, двоичного реверсивного счетчика (PC) 4 с текущим значением выходного кода (NHAЧ).
Используемый в составе устройства корректирующий канал (КК) содержит: измеритель временного интервала (Т) 9; аналого-цифровой преобразователь (АЦП) 10 с опорным напряжением постоянного тока =UОП; первое запоминающее устройство (ЗУ1) 11; первый цифровой сумматор (ЦС1) 12; цифровой интегратор (ЦИ) 13 и второе (энергонезависимое) запоминающее устройство (ЗУ2) 14. При этом первый и второй выходы ДУ 1 подключены соответственно к аналоговым входам ФЦАП1 2 и ФЦАП2 3, выходы которых подключены к первому и второму входам АС 8, выход АС 8 через Д 7 с опорным напряжением переменного тока UОП подключен к входу АИ 6, выход которого непосредственно подключен к входу управления направлением счета PC 4 (знак), а через ПНЧ 5 - к входу счетных импульсов PC 4, выход PC 4 (NHAЧ) подключен к объединенным цифровым входам ФЦАП1 2, ФЦАП2 3 и к первому входу второго ЦС2 15. При этом выход PC 4 дополнительно подключен к входу Т 9, к адресному входу ЗУ1 11 и адресному входу ЗУ2 14; выход АИ 6 дополнительно подключен к входу АЦП 10; выходы NCC Т 9 и NАЦП(NHAЧ) АЦП 10 подключены к соответствующим входам ЦС1 12, выход которого через ЦИ 13 подключен к информационному входу ЗУ2 14, а выход NКОРР(NHAЧ) ЗУ2 14 подключен к второму входу ЦС2 15. Выход второго цифрового сумматора (ЦС2) представляет собой выход устройства, на котором образуется двоичный выходной код устройства (NXON). Управляющие входы ЗУ1 11, ЦС1 12, ЦИ 13 и ЗУ2 14 объединены между собой и подключены к шине внешнего управления УПР. Последовательное соединение ПНЧ 5 и PC 4 образует цифровой интегратор.
Очевидно, что представленное устройство функционирует в полном соответствии с предлагаемым способом цифрового преобразования угла и не требует дополнительных пояснений.
Оценка точностных возможностей такого корректируемого ЦПУ проводилась с помощью математических моделей с различными видами виртуальных квазисинусоидальных ДУ. Соответствие формируемого массива кодов коррекции и текущей погрешности преобразования угла в код подтверждено испытаниями макетных образцов. Установлено, что при использовании данного способа точность формирования кода NKOH по отношению к точности формирования кода NHAЧ повышается в десятки, сотни раз.
Аппаратная реализация предлагаемого корректирующего канала может быть выполнена на базе цифровых и аналого-цифровых микросхем или с использованием микроконтроллера, обладающего необходимым набором функциональных возможностей.
Следует также отметить, что формирование массива кодов коррекции осуществляется в автоматизированном режиме без использования какого-либо метрологического оборудования. Отсюда временные затраты на выполнение этой операции предельно минимизированы и при необходимости их можно повторять неоднократно без вывода ЦПУ из состава объекта регулирования.
ЛИТЕРАТУРА
1. Домрачев В.М., Ипполитова Е.В. Двухотсчетные амплитудные цифровые преобразователи угла на базе гибридных микросборок серии 2602. // Измерительная техника. 2011. №11. С.16-19.
2. Пат.2235422 РФ. Способ преобразования угла поворота вала в код /Аксененко В.Д., Аксененко Д.В. // Изобретения. Полезные модели. 2004. №24.
3. Сеймур Лэнтон. Гибридный преобразователь сельсин-код с большими интегральными схемами. Электроника. 1981. №13. С.43-48.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308148C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2012 |
|
RU2517055C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2010 |
|
RU2435296C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308802C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365057C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2003 |
|
RU2259631C2 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ОШИБКИ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА В КОД | 2020 |
|
RU2740511C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ АМПЛИТУДНЫХ ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА СЛЕДЯЩЕГО ТИПА | 2004 |
|
RU2269867C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
Изобретение относится к области автоматики и вычислительной техники. Техническим результатом является повышение точности амплитудного преобразования углов поворота в двоичный код следящего типа. Технический результат достигается за счет того, что значения выходного кода основного канала амплитудного цифрового преобразования угла следящего типа суммируют с соответствующими однократно полученными значениями выходного кода корректирующего канала, который формируют при вращении ротора датчика угла основного канала преобразования с постоянной угловой скоростью, равной половине ее максимального рабочего значения, путем аналого-цифрового преобразования тахометрического сигнала основного канала преобразования, интегрирования переменной составляющей преобразованного тахометрического сигнала и регистрации проинтегрированного сигнала. 1 ил.
Способ цифрового преобразования угла, основанный на том, что значения выходного кода образуют суммированием выходного кода основного канала амплитудного цифрового преобразования угла следящего типа и выходного кода корректирующего канала, отличающийся тем, что соответствующие значения выходного кода корректирующего канала формируют при вращении ротора датчика угла основного канала преобразования с постоянной угловой скоростью, равной половине ее максимального рабочего значения, путем аналого-цифрового преобразования тахометрического сигнала основного канала преобразования, интегрирования переменной составляющей преобразованного тахометрического сигнала и регистрации проинтегрированного сигнала.
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД | 2003 |
|
RU2235422C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2003 |
|
RU2259631C2 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308802C1 |
| Способ преобразования угла поворота вала в код | 1978 |
|
SU765846A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2010 |
|
RU2435296C1 |
| УСТРОЙСТВО ЗАЩИТЫ ВЫВОДОВ ИНТЕГРАЛЬНЫХ СХЕМ СО СТРУКТУРОЙ МДП ОТ ЭЛЕКТРОСТАТИЧЕСКИХ РАЗРЯДОВ | 2005 |
|
RU2308146C2 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365057C1 |
| US 7009535 B2, 07.03.2006 | |||
| US 7786909 B2, 31.01.2010. | |||

