Изобретение относится к области авиации и может быть использовано в системах управления автожиров.
Автожир с несущим винтом, установленным на валу неподвижно или с возможностью качания, вращающийся в режиме авторотации под воздействием относительного потока, и с толкающим или тяговым винтом имеет по сравнению с вертолетом, ротор которого обеспечивает двойную функцию (поддержки и тяги), преимущество - много меньшую стоимость изготовления.
Для устранения недостатка автожира передавать рычагу управления, а следовательно пилоту, значительные усилия от воздействия относительного потока на винт с учетом значительных размеров последнего и нагрузок, которым он подвергается в процессе различных движений автожира, его ускорений и торможений, а также вариаций в направлении и/или интенсивности относительного потока, было предложено в известном техническом решении установить несущий винт на оси тангажа, немного смещенной назад по отношению к оси вращения винта и расположенной под плоскостью вращения последнего.
Благодаря такому расположению была получена не только частичная компенсация усилий тангажа и уменьшение реакций на уровне рычага управления, но также эффект полуавтоматичности управления по тангажу. В самом деле, если по какой-либо причине скорость автожира уменьшается, аэродинамическое сопротивление на винте также уменьшается. Вследствие меньшей силы сопротивления, направленной назад, винт наклоняется вперед и автожир начинает спуск и ускоряется. Но это ускорение возвращает автожир к своей прежней скорости и аэродинамическое сопротивление вновь принимает свое прежнее значение, воздействуя на винт вновь назад, что выравнивает его и замедляет скорость.
Однако несмотря на это реакция тангажа, которая должна противостоять пилоту на рычаге управления, меняется с изменением скорости (для одной и той же массы на постоянной высоте) или с изменением массы при постоянной скорости. Вот почему смещение оси тангажа по отношению к оси вращения винта и расстояние от плоскости его вращения обычно выбираются для крейсерской скорости автожира, транспортирующего некоторый процент максимальной нагрузки. Так уравновешивают момент пикирования подъемной силы и кабрирующий момент аэродинамического сопротивления при крейсерской скорости и эквивалентной нагрузке, составляющей определенный процент от максимальной, при этом нагрузка на рычаг управления не подвергается воздействию реакции (реакция равна нулю).
С другой стороны, усилие воздействия пилота для обеспечения полета автожира с отличной скоростью будет тем больше, чем эта скорость больше отличается от крейсерской, поскольку оно противостоит тем большему кабрирующему моменту, чем больше скорость полета, или тем большему моменту пикирования, чем меньше скорость полета. Поэтому были предложены компенсирующие пружины для разгрузки пилота с тем, чтобы его усилие не становилось слишком большим в случае продолжительного полета с большой или малой скоростью, причем эти пружины могут быть в случае необходимости отрегулированы путем фиксации в нескольких возможных точках закрепления. Но такая система не только требует вмешательства перед каждым полетом, но также в случае, когда речь идет лишь только о направлении "кабрирования" или только о направлении "пикирования", не позволяет перекрыть все условия одного и того же полета, которые были запланированы, ни тем более реализуемые конкретно, причем пилот может оказаться перед обстоятельствами, не предусмотренными в процессе установления плана.
На решение указанных задач направлено изобретение.
Эти задачи решаются тем, что автожир, содержащий шарнирный ротор, установленный с возможностью управления в боковом и продольном каналах через систему управления, включающую систему тяг, качалок и рычагов, связанных с ручкой управления и образующих шарнирный параллелограмм и упругое устройство, содержащее два упругих элемента, действующих противоположно друг другу и имеющих общую опору, снабжен механическим домкратом, взаимодействующим с упругим устройством, которое установлено с возможностью воздействия на систему управления ротором в обоих направлениях в продольном канале без влияния на управление в боковом канале.
Опорная точка установки механического домкрата может быть соединена или с тягой управления в боковом канале, или с корпусом автожира.
Выходная точка упругого устройства соединена с серединой одной из малых сторон шарнирного параллелограмма.
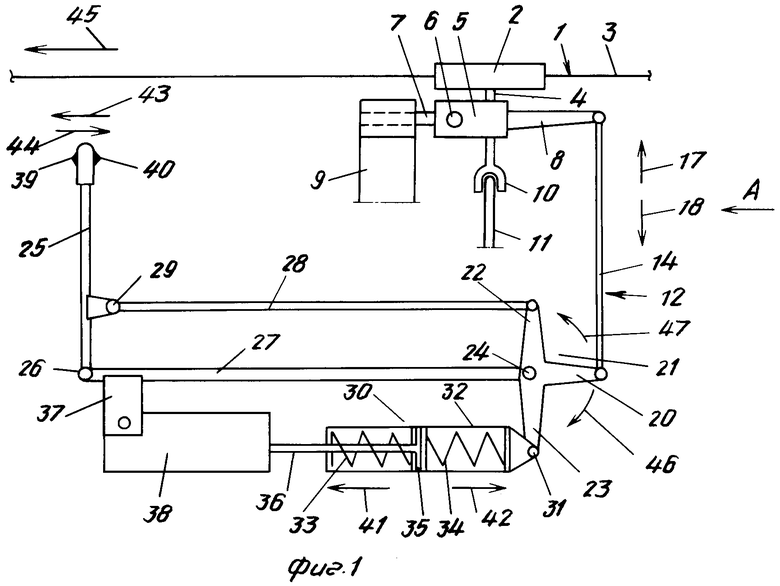
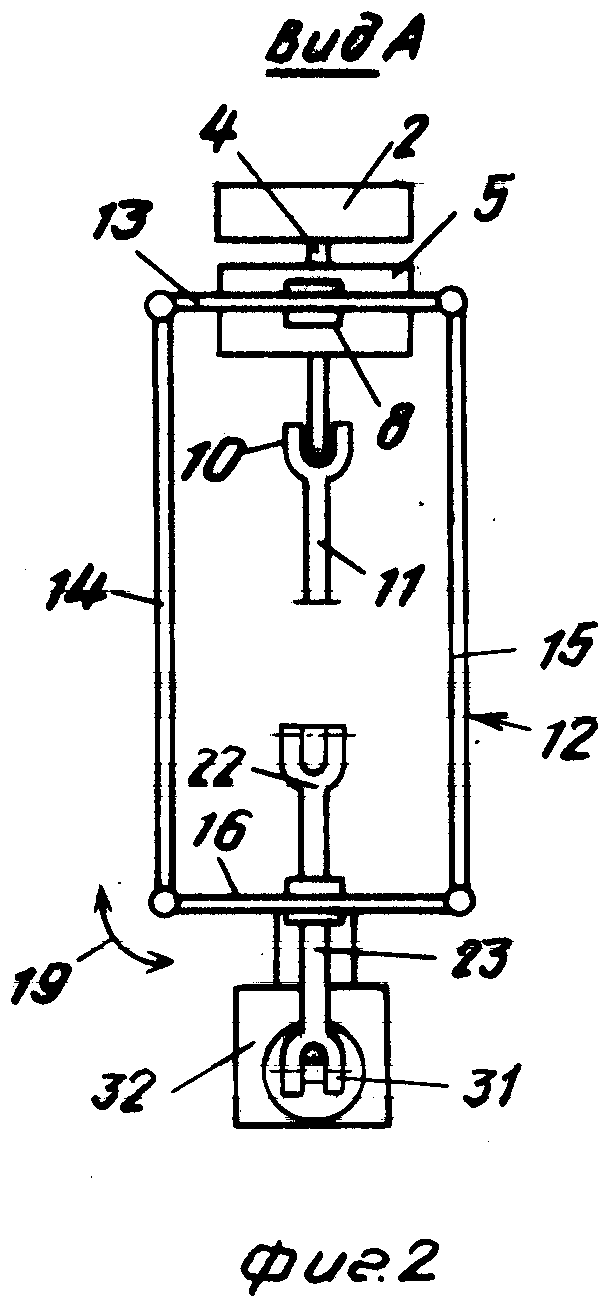
На фиг. 1 изображена схема системы управления автожиром; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - вариант системы управления; на фиг. 4-6 - три положения упругого устройства.
Поддерживающий винт или ротор 1, имеющий ступицу 2 и лопасти 3, установлен на валу 4, закрепленном в подшипнике 5. Этот подшипник шарнирно закреплен с одной стороны на оси 6, а с другой стороны - на оси 7, перпендикулярной первой. Ось 6 будет называться осью тангажа, а ось 7 -осью крена. На подшипнике 5 закреплен рычаг 8.
Ось 7 крена вращается в подшипнике (не показан), встроенном в стойку 9, жестко связанную с корпусом автожира, и расположена перед подшипником 5.
Вал 4 ротора приводится во вращение благодаря шарнирному соединению с карданом 10 с помощью вала 11, показанного частично
Подшипник 5 несет рычаг 8, соединенный с шатунно-поршневой группой 12 в форме параллелограмма, верхняя тяга 13 которого жестко связанная с рычагом 8, шарнирно соединена с концами двух тяг 14 и 15, а нижняя тяга 16 шарнирно соединена с другими концами двух указанных тяг.
Эти четыре шарнирных соединения обеспечивают одновременно перемещение комплекса параллелограмма по стрелкам 17 и 18 (фиг. 1) и деформацию по стрелке 19 (фиг. 2).
Нижняя тяга 16 образует одно целое с рычагом 20 углового привода 21, который имеет для этого два других рычага 22 и 23 и который шарнирно закреплен в точке 24, как это будет пояснено далее.
Ручной рычаг 25 шарнирно закреплен в точке 26 на тяге 27, установленной с возможностью поворота в подшипниках (не показаны), которые жестко связаны с корпусом автожира и препятствуют осевому перемещению тяги 27.
Тяга 28 связывает ручной рычаг 25 с рычагом 22 привода 21 и закрепляется шарнирно в точке 29.
Упругое устройство 30 шарнирно закреплено в точке 31 на рычаге 23. Оно состоит из цилиндра 32, в котором размещены две идентичные пружины 33 и 34. Эти пружины находятся в нулевой точке, в среднем положении, т.е. они не работают в этом положении. Они закреплены с одной стороны на поршне 35, снабженном штоком 36 и скользящем внутри цилиндра, а с другой стороны на концах цилиндра 32.
На тяге 27 приварен суппорт 37, на котором шарнирно закреплен комплекс 38, имеющий механический домкрат с неподвижной гайкой и шток с резьбой, управляемый посредством вращения электродвигателем двойного действия. Шток с нарезкой управляет осевым перемещением штока 36 и, следовательно, перемещением поршня 35 внутри цилиндра 32 в одном или другом направлении.
Шарнирное крепление комплекса 38 на суппорте 37 не позволяет ему перемещаться трансляционно по отношению к суппорту. Поэтому он остается неподвижным, а шток с резьбой и шток 36 обеспечивают то, что поршень 35 представляет собой опорную точку пружин 33 и 34 при любом положении поршня внутри цилиндра 32.
Рукоятка рычага 25 имеет два электрических контактора 39 и 40. Замыкание контактора 39 обеспечивает запуск электрического двигателя комплекса 38, вызывая этим перемещение поршня 35 к комплексу (стрелка 41), тогда как замыкание контактора 40 обеспечивает запуск электродвигателя комплекса 38, вызывая перемещение поршня 35 к точке 31 (стрелка 42).
Шарнирные соединения в точках 26 и 24 таковы, что движение рычага 25 вокруг точки 26 по стрелкам 43 или 44, т.е. в тангаже, преобразуется в движение такого же углового значения и того же направления привода 21 вокруг точки 24. С другой стороны, любое движение рычага 25 вокруг точки 26 в плоскости, перпендикулярной стрелке 43, вызывает поворот элементов 27-28-21-30-37-38 вокруг оси поворота тяги 27. Это движение вызывает вследствие движения сообщенного рычагу 20, а следовательно, тяге 19, деформацию по стрелке 19 шатунно-поршневой группы 12 в виде параллелограмма.
В этих условиях работа происходит следующим образом.
Автожир находится в полете с крейсерской скоростью в направлении, указанном стрелкой 45, ротор 1 расположен горизонтально, подшипник 5, шатунно-поршневая группа 12, угловой привод 21 и рычаг 25 управления полетом находятся в положениях, показанных на фиг. 1 и 2.
Если пилот желает кабрировать свой аппарат, он тянет на себя в направлении стрелки 44 рычаг 25 управления полетом. Движение последнего передается через тягу 28 приводу 21, который поворачивается вокруг точки 24 в направлении стрелки 46 и опускает шатунно-поршневую группу 12. Своей верхней тягой 13 он тянет назад комплекс, состоящий из рычага 8, подшипника 5, вала 4 и ротор 1, который поворачивается вокруг оси 6 и начинает кабрировать.
Так работает классический автожир. Но имеется отличие, состоящее в том, что пилот одновременно с оттягиванием на себя рычага 25 управления полетом замыкает контактор 39, действующий на силовой цилиндр комплекса 38. Он перемещает в осевом направлении шток 36 по стрелке 41, сжимая пружину 33 и вытягивая пружину 34. Таким образом, обе пружины стремятся переместить цилиндр 32 в том же направлении (стрелка 41), причем пружина 33 работает на сжатие, а пружина 34 на растяжение. Привод 21 стремится повернуться в направлении стрелки 46, опустить шатунно-поршневую группу 12 и привести аппарат в кабрирование.
Следовательно, пилот не прилагает значительного усилия для вытягивания ручки 25 управления полетом на себя, поскольку пружины 33 и 34 управляются силовым цилиндром комплекса 38 и существенно помогают выполнению этого маневра.
Явления будут инверсными, если пилот захочет перевести свой автожир в пикирование. Он замыкает контактор 40 одновременно с подачей вперед (стрелка 43) рычага 25 управления полетом.
В этом случае его воздействие на рычаг 25 передается через тягу 28 приводу 21, который таким образом поворачивается в направлении стрелки 47. Но одновременно силовой цилиндр комплекса 38 перемещает поршень 35 в направлении стрелки 44, сжимая пружину 34 и растягивая пружину 33. Это приводит к перемещению цилиндра 32 в том же направлении, что и поршень 35, а привод 21 поворачивается в направлении стрелки 47.
Как и в предыдущем случае, пружины 33 и 34 управляются силовым цилиндром комплекса 38, что существенно помогает пилоту в управлении.
Таким образом, управление автожиром стало существенно легче, а пилотаж стал более точным, даже в условиях полета, существенно отличающихся от нормальных условий крейсерского полета.
Управление по крену выполняется классическим маневрированием справа налево или слева направо рычага 25 управления полетом. Это приводит к повороту тяги 27 и всего, что на ней крепится, а именно элементов 37-38-32-21. При повороте рычаг 20 углового привода 21 увлекает поперечную тягу 16 шатунно-поршневой группы 12, а через тяги 14 и 15 поперечную тягу 13. В свою очередь, она через рычаг 8 поворачивает комплекс ротора 1 вокруг оси крена 7.
Следует отметить, что упругое устройство обеспечения управления по тангажу, каким бы ни было положение поршня 35 в цилиндре 32, не воздействует никоим образом на управление по крену.
Вторым преимуществом устройства, предлагаемого изобретением для помощи пилоту в управлении, является то, что в определенных условиях он может отпустить рычаг управления полетом 25.
Предположим, что в крейсерском полете в нормальных условиях пилот отпустит рычаг управления.
Если аэродинамическое сопротивление увеличивается, это увеличение выражается тенденцией ротора кабрировать, наклоняясь назад. Шатунно-поршневая группа 12 стремится опуститься и повернуть (стрелка 46) угловой привод 21 вокруг точки 24, этот поворот будет передан тягой 28 рычагу 25 управления полетом, оттянутому назад по стрелке 44.
Но две пружины - 33 и 34, первая из которых растянута, а вторая сжата, будут препятствовать таким движениям и гасить эти эффекты. Если пружины корректно оттарированы, то реакции будут смягчены или практически сведены к нулю.
Кроме того, если условия работы ротора 1 меняются в направлении увеличения момента пикирования, это увеличение выразится тенденцией ротора наклоняться вперед и, следовательно, подъемом шатунно-поршневой группы 12, поворотом углового привода 21 по стрелке 47 и наклонном рычаге 25 управления полетом в направлении стрелки 43. Но, как и в предыдущем случае, пружины 33 и 34 препятствуют таким движениям и поглощают эффекты, причем их действия инверсны, поскольку пружина 33 сжимается, а пружина 34 растягивается.
Третьим преимуществом, вытекающим из второго, является возможность и простота установки полуавтоматического и даже автоматического управления автожиром.
Аэродинамическое сопротивление, которое вызывает эффект кабрирования, непосредственно зависит от скорости автожира. Можно приводить в действие управление комплексом 38 с помощью анемометра с тем, чтобы вызвать, когда это необходимо, либо эффект пикирования, в случае замедления, либо эффект кабрирования в противоположном случае.
Очевидно, что можно без выхода за рамки изобретения изменять детали конструкции или их устройство с целью получения того же результата.
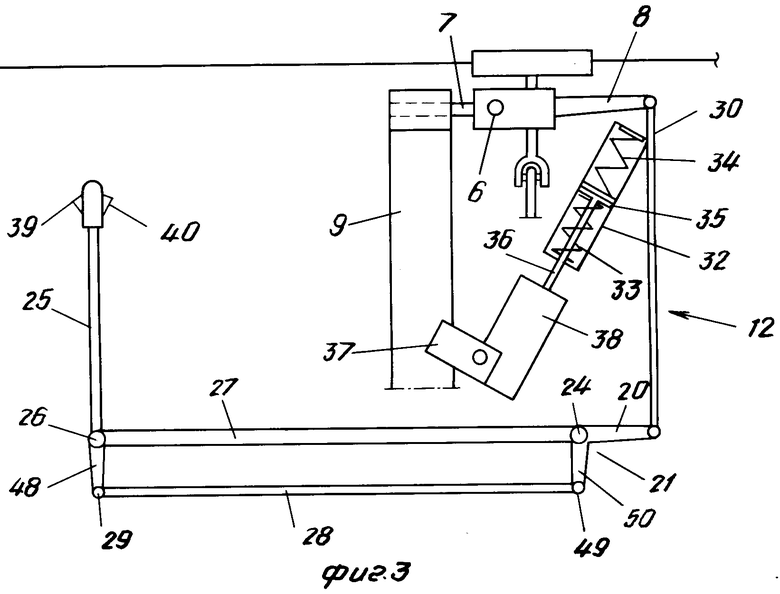
На фиг. 3 показан пример реализации изобретения, в котором упругое устройство 30 по изобретению не связано, как на фиг. 1, с трубкой крена, составляющей часть системы управления полетом, а непосредственно шарнирно закреплено на рычаге 8 подшипника ротора.
Это упругое устройство идентично тому, которое было показано на фиг. 1: оно состоит из цилиндра 32, внутри которого скользящий поршень 35 жестко связан с двумя пружинами 33 и 34, идентичными между собой и установленными с обеих сторон указанного поршня. Шток 36 связан с нарезной тягой механического силового комплекса 38, шарнирно закрепленного на суппорте 37, который фиксируется на стойке 9, несущей ротор, с помощью оси 7 крена и оси 6 тангажа.
Управление полетом упрощается по сравнению с управлением по фиг. 1. Система управления включает в себя рычаг 25 с двумя электрическими контакторами (один 39 кабрирования и другой 40 пикирования), поворотную трубку, называемую тягой 27 крена, несущую на своих концах две шарнирные точки 26 и 24, на которых шарнирно закреплены угловой привод 21 и рычаг 25 управления полетом. Кроме того, он продолжается за точку 26 рычагом 48, на котором шарнирно закреплена в точке 29 тяга 28, шарнирно закрепленная на другом конце в точке 49 на рычаге 50 углового привода 21. Наконец, он имеет второй рычаг 20, шарнирно закрепленный на шатунно-поршневой группе 12 в виде параллелограмма.
Работа этого комплекса аналогична тому, который показан на фиг. 1, любое перемещение поршня 35 в цилиндре 32 вызывает реакцию либо кабрирования, либо пикирования на роторе, как и в случае фиг. 1.
Значение этого устройства состоит в уменьшении напряжений в органах трансмиссии управления полетом по отношению к устройству, показанному на фиг. 1.
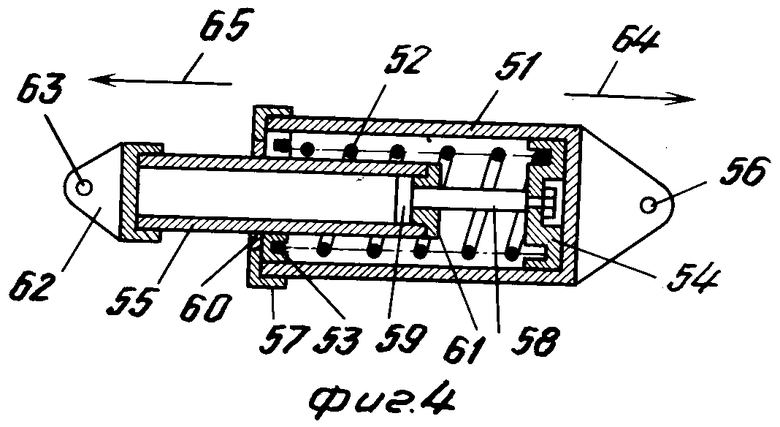
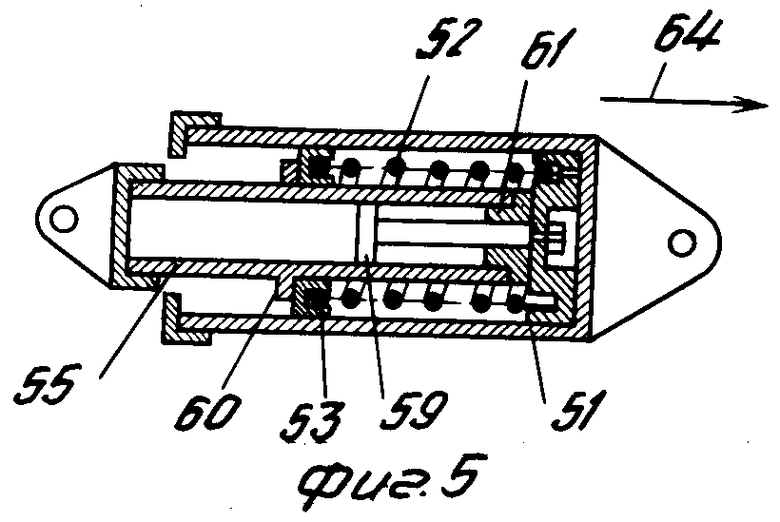
Упругое устройство 30 может быть выполнено с одной пружиной. В этом случае оно включает в себя цилиндр 51, пружину 52, чашки 53 и 54 и золотник-челнок 55.
Цилиндр 51 несет шарнир 56, обеспечивающий его установку либо как цилиндра 32 (фиг. 1), либо как цилиндра 32 (фиг. 3). С другого конца он частично закрыт опорным кольцом 57.
Чашки 53 и 54 точно подогнаны внутри цилиндра 51 и представляют собой герметично скользящие поршни. Кроме того, чашка 53 герметично скользит на золотнике-челноке 55.
Наконец, чашки 53 и 54 имеют перфорацию, сообщающую их две поверхности, причем их роль будет объяснена далее, а чашка 54 имеет центральный шток 58, заканчивающийся круглой пятой 59.
Золотник-челнок 55 имеет заплечик 60 и заканчивается на одном своем конце перфорированной пробкой 61, через которую проходит центральный шток 58 чашки 54, а на другом конце - колпаком 62, шарнирно закрепленным в точке 63 на штоке силового цилиндра (не показан).
На фиг. 4 устройство находится в положении покоя: пружина 52 сжата между чашками 53 и 54. Чашка 54 находится в контакте с основанием цилиндра, тогда как пята 59 центрального штока 58 контактирует с пробкой 61 золотника-челнока 55. Чашка 53 находится в контакте одновременно с заплечиком 60 золотника-челнока 55 и с опорным кольцом 57. Контактная поверхность между пятой 59 и пробкой 61 размещается на равном расстоянии от опор пружины 52 на чашки 53 и 54, при этом система находится в равновесии.
На фиг. 5 золотник-челнок 55 отодвинут к основанию цилиндра 51. В этом движении заплечик 60 отталкивает чашку 53. С этого момента нет больше контакта между пятой 59 и пробкой 61, именно заплечик 60 становится точкой опоры пружины 52. Под воздействием сжатия она отталкивает цилиндр 51 в направлении стрелки 64 и если цилиндр установлен как цилиндр 32 на фиг. 1, его движение заставляет поворачиваться привод 21, поднимать шатунно-поршневую группу 12 и через рычаг 8 установить ротор в положении пикирования, тогда как если он установлен как цилиндр 32 на фиг. 3, он непосредственно поднимает рычаг 8, что приводит ротор в положение пикирования.
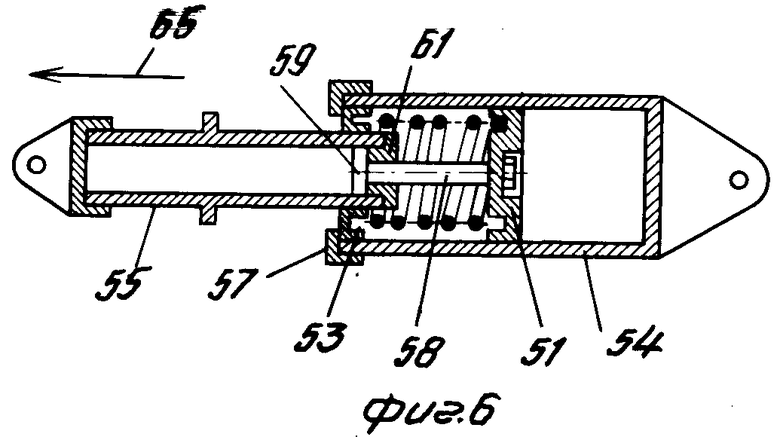
На фиг. 6 положение пружины инвертировано.
Золотник-челнок 55 оттянут во внешнюю сторону цилиндра 51 и в этом движении пробка 61 находится в контакте с пятой 59 штока 58, он переместил чашку 54 в направлении стрелки 65. Когда чашка 53 пришла в контакт с опорным кольцом 57, лишь чашка 54 составляет единственную опору пружине 52. Сжатие последней отталкивает цилиндр 51 в направлении стрелки 65 и результатом такого движения будет кабрирование ротора с помощью шатунно-поршневой группы 12 и рычага 8.
Особое значение упругой системы с одной пружиной состоит в том, что очень редко пружина в сжатом состоянии может быть разрушена и возможный разрыв не влияет на безопасность.
Следует отметить также, что особый интерес представляет то, что реализация чашек 53 и 54 представляет собой герметично скользящие поршни в цилиндре 51, поэтому они представляют собой пневматические амортизаторы вибраций аэродинамического типа, поступающих от ротора, а в отсутствие перфораций чашек упругая система не передает этих вибраций, но это приводит к значительному усилию для пилота в процессе маневрирования рычагом управления полетом. Целью перфораций является обеспечение перемещения чашек и регулировка пружины 52 без слишком значительного усилия со стороны пилота, сохраняя при этом для чашек эффект поршня и пневматического амортизатора посредством потерь нагрузок, которые они составляют.
Кроме того, возможно обеспечить работу пружин 33 и 34 (фиг. 1) лишь на сжатие. Для этого достаточно не связывать жестко эти пружины с поршнем 35. Но они должны быть рассчитаны для этого.
Хотя выбранный пример применения относится к автожирам с ротором, ось которого смещена по отношению к оси тангажа, изобретение применимо также к автожирам, ось вращения ротора которых пересекает ось тангажа. Кроме того, следует отметить, что на этих автожирах улучшение, внесенное в управление особенно велико, поскольку они не используют амортизацию реакций тангажа смещением оси вращения ротора по отношению к оси тангажа.
В выбранных примерах автожир не оборудовался упругим устройством обеспечения управления креном, поскольку его реакция обычно минимальна по сравнению с тангажом. Но, очевидно, что такое устройство могло бы быть установлено на тех же принципах, что и в описаниях примеров. Устройство обеспечения управления тангажом не оказывало вредного влияния на управление креном. Поэтому оно может быть оборудовано аналогичным устройством без оказания каких-либо помех на управление тангажом.
В рассмотренных примерах рычаг управления расположен сзади подшипника, несущего вал ротора. Очевидно, что он может быть установлен либо между неподвижной стойкой и подшипником, либо перед стойкой. Тогда достаточно учесть изменение тяг рычага и кинематику для получения того же результата.
Что касается механических пружин, их возможно заменить гидропневматическими устройствами, обеспечивающими регулирование давления и напряжения.
Можно также заменить механический силовой цилиндр комплекса 38 с электрическим приводом на гидравлический цилиндр или на электромагнитный силовой цилиндр, например, с подвижным сердечником соленоида.
Изобретение относится к области авиационной техники и может быть использовано в системах управления автожиров. Автожир с шарнирным ротором, установленным с возможностью управления в боковом и продольном каналах, снабжен механическим домкратом в виде комплекса, взаимодействующим с упругим устройством. Последнее установлено с возможностью управления ротором в обоих направлениях в продольном канале без влияния на управление в боковом канале. Опорная точка установки домкрата (суппорт) может быть соединена с тягой управления в боковом канале или с корпусом автожира. Выходная точка упругого устройства соединена с серединой одной из сторон шарнирного параллелограмма. 3 з.п. ф-лы, 6 ил.
| ЭЛЕКТРОЛИТ ДЛЯ ОСАЖДЕНИЯ ПОКРЫТИЙ ИЗ СПЛАВА НИКЕЛЬ-ЖЕЛЕЗО | 1998 |
|
RU2152461C2 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
