Изобретение относится к области авиации, а именно к дистанционным системам управления самолетов, в которых необходимо обеспечить преобразование механического перемещения ручки управления в пропорциональный этому перемещению электрический сигнал для передачи его в бортовой вычислитель.
Известна ручка для дистанционного управления летательным аппаратом [1], содержащая рукоятку, жестко соединенную со стаканом, который через кардан соединен с рычагом, жестко закрепленным на кронштейне. Кроме того, стакан кинематически соединен с загрузочными цилиндрами крена и тангажа, шарнирно установленными на каркасе летательного аппарата. При этом другой конец каждого загрузочного цилиндра связан с входным звеном соответствующего датчика по крену и тангажу.
Эта конструкция ручки управления недостаточно удобна, так как при управлении ею летчик совершает кистевое движение, что не традиционно при продольном управлении самолетом. Указанный недостаток снижает удобство и безопасность управления и обусловлен отсутствием возможности поступательного перемещения ручки относительно нейтрального положения.
Известна также ручка управления, предназначенная для управления тягой двигателя и антенной радарной установки самолета-истребителя [2] и содержащая корпус, в котором установлены направляющие каретки, каретку с опорой и с поворотной рукояткой, кинематически связанной с датчиками положения по крену и тангажу.
Так как рукоятка ручки управления установлена в верхней части корпуса, то ось вращения ее практически находится в руке у летчика.
Таким образом, при работе летчику приходится действовать кистью руки, что при длительном полете может вызвать утомление, например при управлении самолетом по крену, а это снижает удобство и безопасность управления полетом.
Целью изобретения является повышение удобства управления и безопасности полета.
Поставленная цель достигается тем, что в ручке управления, содержащей корпус, в котором установлены направляющие каретки, каретку с опорой и поворотной рукояткой, кинематически связанной с датчиками положения по крену и тангажу, согласно изобретению ось вращения рукоятки совмещена с осью направляющей каретки, при этом кинематическая связь с датчиком положения по крену выполнена в виде подпружиненного водила, соединенного с корпусом датчика и установленного на кронштейне, жестко соединенном с кареткой, и зубчатой передачи, шестерня которой закреплена на входном звене датчика, а колесо - на торце опоры поворотной рукоятки, а кинематическая связь с датчиком положения по тангажу выполнена в виде подпружиненного водила, установленного на корпусе, одноплечей качалки, соединенной через тягу с кареткой, и зубчатой передачи, включающей шестерню, закрепленную на входном валу датчика, и зубчатый сектор, установленный на качалке, при этом качалка шарнирно соединена с загрузочным цилиндром тангажа, шарнирно закрепленным на корпусе, а опора поворотной рукоятки выполнена подпружиненной.
Благодаря тому, что в конструкции предложенной ручки управления рукоятка шарнирно установлена на направляющей каретки, т.е. совмещена ось вращения ручки с осью направляющей каретки, а также выполнению опоры поворотной рукоятки подпружиненной и выполнению кинематической связи с датчиком положения по крену через зубчатое колесо, установленное на торце опоры, обеспечивается традиционное управление по этому каналу, т.е. пилот при управлении работает не только кистью руки, но и предплечья, что не вызывает утомления, а кинематическая связь рукоятки через каретку, качалку и зубчатую передачу с датчиком положения по тангажу обеспечивает удобное сечение дистанционного управления по обоим каналам. Таким образом, обеспечение возможности пилоту при управлении по крену и тангажу совершать привычные перемещения ручки обеспечивает удобство управления, что одновременно позволяет повысить безопасность полета.
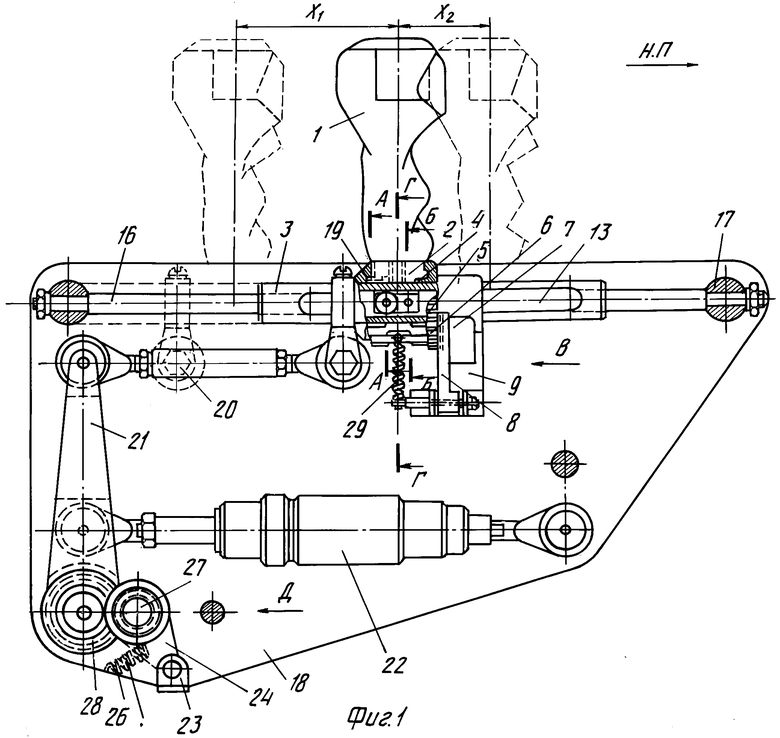
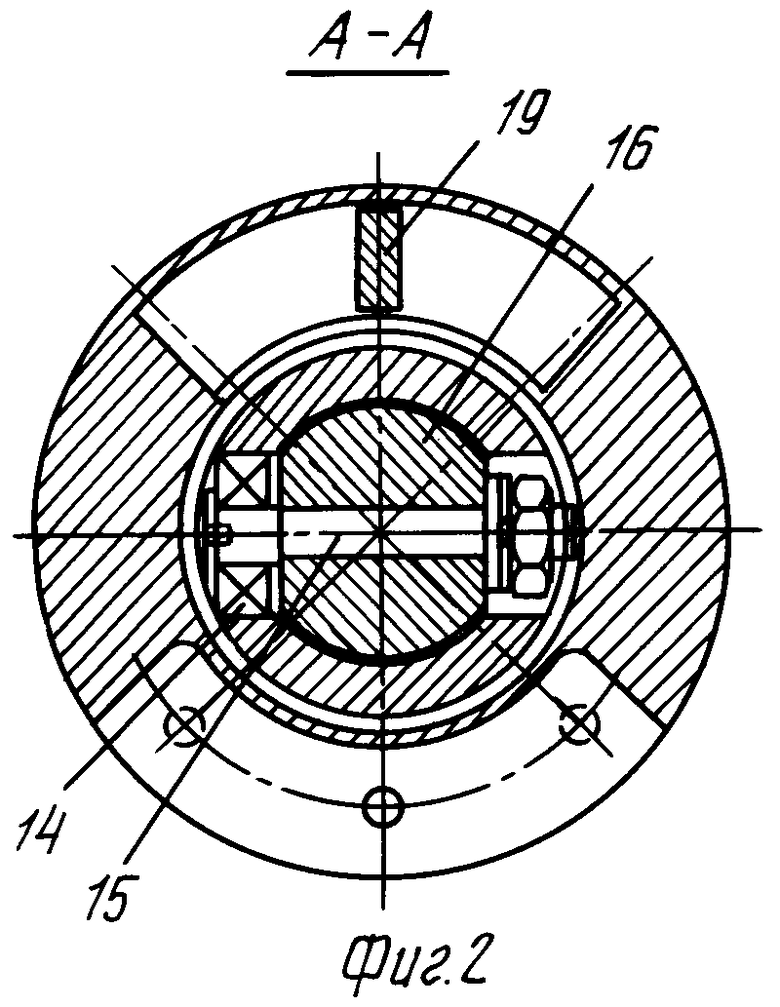
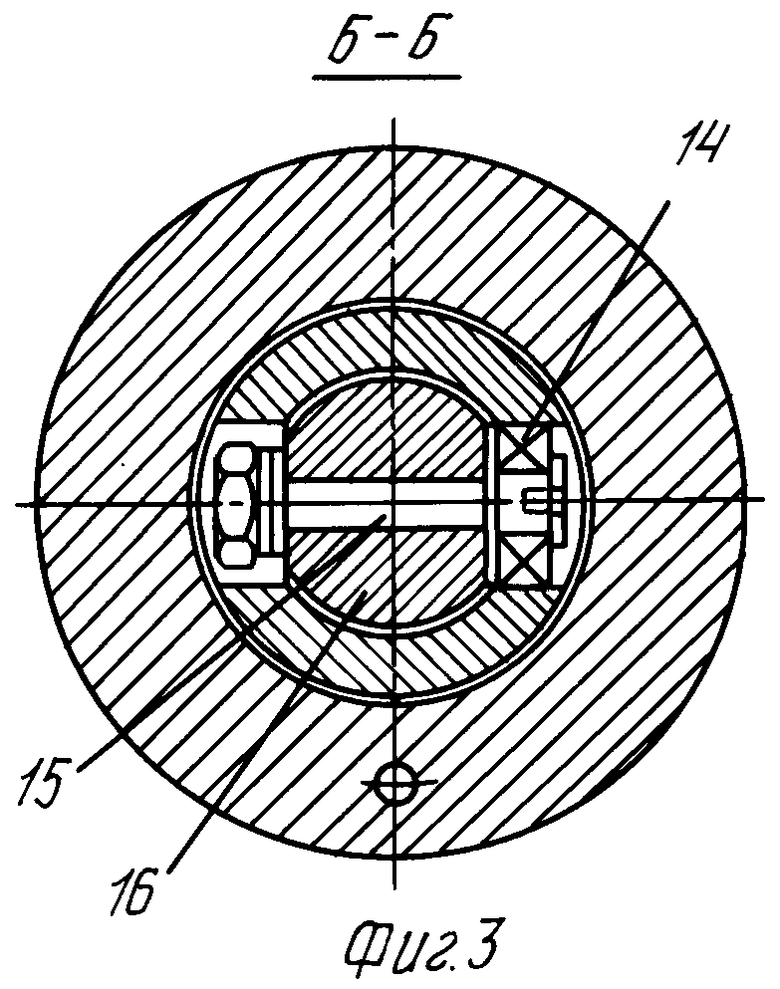
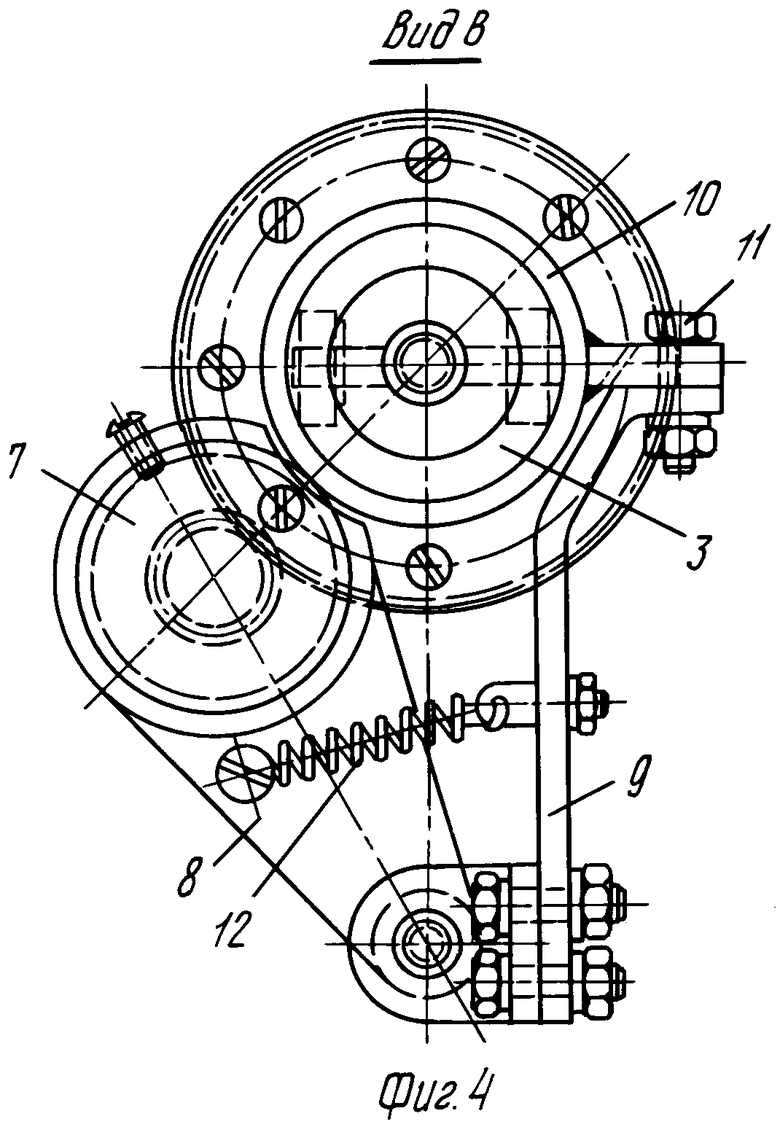
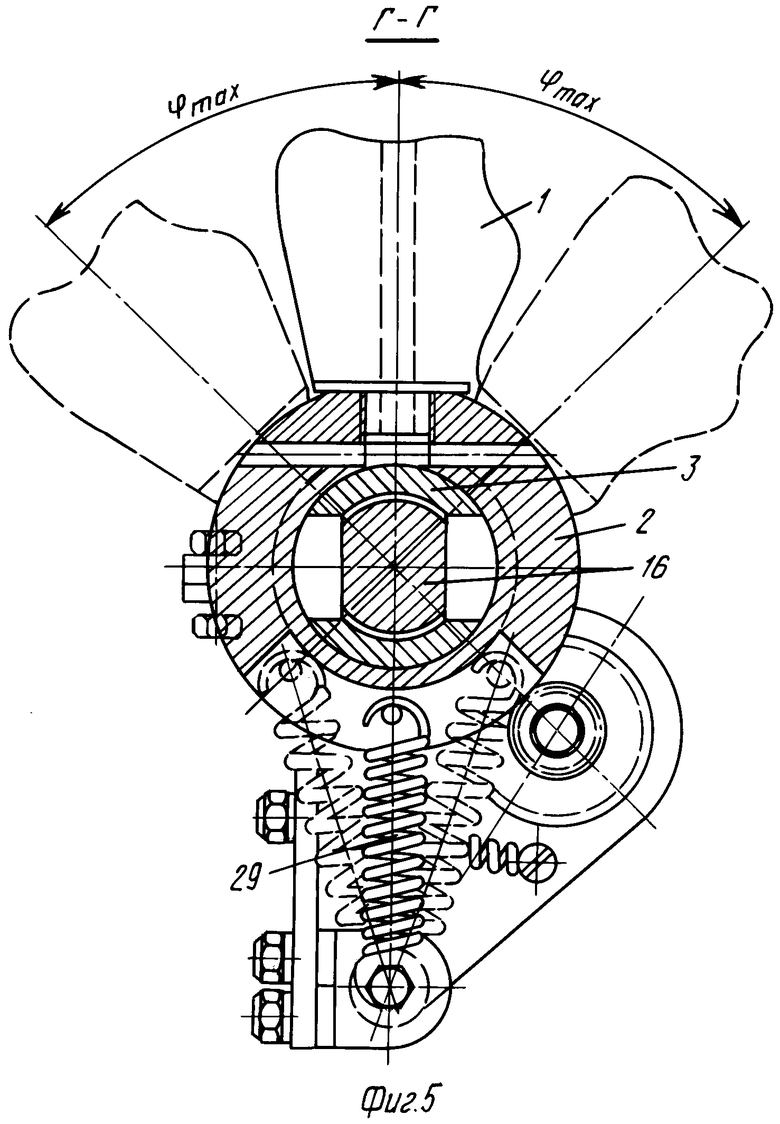
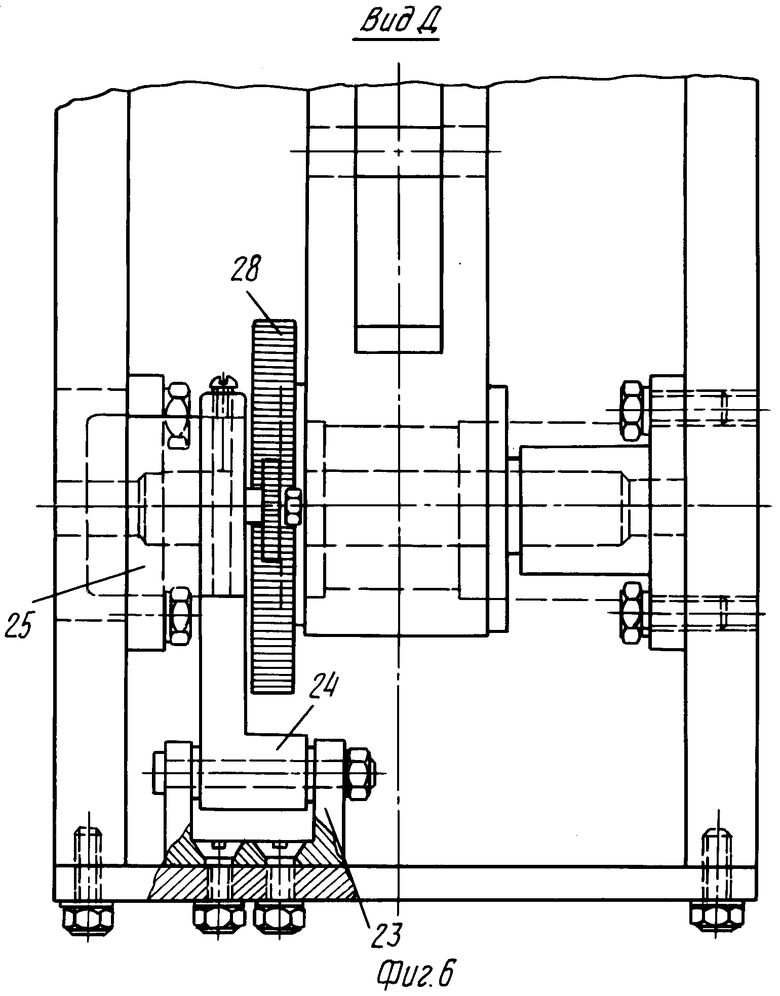
На фиг. 1 представлен общий вид предложенного устройства; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид по стрелке В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1; на фиг. 6 - вид по стрелке Д на фиг. 1.
Ручка управления содержит рукоятку 1 (фиг. 1), резьбовой конец которой соединен с подпружиненной опорой 2, установленной на каретке 3 посредством подшипников скольжения 4. На торцовой части опоры 2 закреплено зубчатое колесо 5, входящее в зацепление с шестерней 6 датчика положения 7 по крену. Датчик 7 закреплен на конце водила 8, установленного на кронштейне 9, который закреплен на каретке 3 с помощью хомута 10, соединенного с кронштейном 9 болтом 11. Водило 8 и кронштейн 9 соединены между пружиной 12. В каретке 3 (фиг. 1) с двух сторон выполнены продольные пазы 13, в которых установлены подшипники 14 (фиг. 2 и 3). Каждый подшипник закреплен эксцентриковым болтом 15 в направляющей 16, зафиксированной в стойках 17 (фиг. 1), установленных в щеках корпуса 18. На каретке 3 установлен упор 19, ушковый конец которого через тягу 20 соединен с качалкой 21, шарнирно установленной на корпусе 18. Качалка 21 шарнирно соединена с загрузочным цилиндром 22, другой конец которого шарнирно закреплен на корпусе 18. Кроме того, на дополнительном кронштейне 23, закрепленном на корпусе 18, установлено водило 24, на конце которого установлен датчик положения 25 (фиг. 6) по тангажу. При этом водило 24 соединено с корпусом 18 пружиной 26, а шестерня 27 датчика 25 входит в зацепление с зубчатым сектором 28, установленным на одной оси с качалкой 21 и жестко с ней соединенным.
Управление самолетом по тангажу производится следующим образом.
При приложении усилия к рукоятке 1 (фиг. 1) перемещается жестко соединенная с ней каретка 3 относительно нейтрального положения на кабрирование Х1 (на себя) или на пикирование Х2 (от себя). Перемещение каретки 3 приводит в движение кинематическую связь - тяга 20, качалка 21. При этом поворот качалки 21 вызывает соответственно и поворот зубчатого сектора 28, находящегося в зацеплении с выходной шестерней 27 датчика положения 25 (фиг. 6), а поворот шестерни 27 вызывает формирование сигнала, пропорционального перемещению рукоятки, который передается в бортовой вычислитель. Пружина 26 (фиг. 1) при этом обеспечивает безлюфтовое соединение в зубчатом зацеплении, что обеспечивает передачу точного сигнала. Одновременно при повороте качалки 21 происходит обжатие загрузочного цилиндра 22, что создает расчетный градиент усилий на рукоятке 1. При отпускании рукоятка 1 под действием пружины загрузочного цилиндра 22 возвращается в нейтральное положение. Таким образом обеспечивается удобное привычное управление по тангажу.
Управление по крену осуществляется поворотом рукоятки 1 (фиг. 5) относительно нейтрального положения на угол ϕ . Вместе с рукояткой 1 поворачивается опора 2 и жестко соединенное с ней зубчатое колесо 5 (фиг. 1), которое, находясь в защеплении с входной шестерней 6 датчика положения 7, поворачивает ее, в результате чего формируется сигнал, пропорциональный повороту рукоятки 1, который поступает в бортовой вычислитель. Расчетное усиление на рукоятке 1 при этом создается пружиной 29 (фиг. 5). Одновременное управление по тангажу и по крену осуществляется поворотом рукоятки (фиг. 1) 1 на необходимый угол при любом поступательном перемещении по Х1 или Х2.
Использование предложенной ручки управления позволит повысить удобства управления и безопасность полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 2009 |
|
RU2395428C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВАЛОМ ДАТЧИКА СИСТЕМЫ УПРАВЛЕНИЯ ПОВОРОТОМ СТОЙКИ ШАССИ САМОЛЕТА | 1992 |
|
RU2097271C1 |
| СИЛОВОЙ ЗАМОК ШАССИ САМОЛЕТА | 1993 |
|
RU2068799C1 |
| ФОРТОЧКА КАБИНЫ ЭКИПАЖА САМОЛЕТА | 2011 |
|
RU2475413C1 |
| БОКОВАЯ РУЧКА УПРАВЛЕНИЯ САМОЛЕТОМ | 2014 |
|
RU2571992C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 1992 |
|
RU2070140C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2016 |
|
RU2652284C1 |
| Командный блок устройства управления передней опорой шасси самолета (варианты) | 2018 |
|
RU2695967C1 |
| ПЕРЕДНЯЯ ОПОРА ШАССИ САМОЛЕТА | 1997 |
|
RU2123961C1 |
| АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ УПРАВЛЕНИЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 2002 |
|
RU2231127C1 |
Изобретение относится к области авиации, а именно к дистанционным системам управления самолетов, в которых необходимо обеспечить преобразование механического перемещения ручки управления в пропорциональный этому перемещению электрический сигнал для передачи его в бортовой вычислитель. Цель изобретения - повышение удобства управления и безопасности полета. Цель достигается тем, что ручка управления содержит корпус, в котором установлены направляющие каретки, каретку с опорой и поворотной рукояткой, кинематически связанной с датчиками положения по крену и тангажу. Ось вращения рукоятки совмещена с осью направляющей каретки. При этом кинематическая связь с датчиком положения по крену выполнена в виде подпружиненного водила, соединенного с корпусом датчика и установленного на кронштейне, жестко соединенном с кареткой, и зубчатой передачи, шестерня которой закреплена на входном звене датчика, а колесо - на торце опоры поворотной рукоятки. Кинематическая связь с датчиком положения по тангажу выполнена в виде подпружиненного водила, установленного на корпусе, одноплечей качалки, соединенной через тягу с кареткой, и зубчатой передачи, включающей шестерню, закрепленную на входном валу датчика, и зубчатый сектор, установленный на качалке, при этом качалка шарнирно соединена с загрузочным цилиндром тангажа, шарнирно закрепленным на корпусе, а опора поворотной рукоятки выполнена подпружиненной. 6 ил.
РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащая корпус, в котором установлены направляющие каретки, каретку с опорой и поворотной рукояткой, кинематически связанной с датчиками положения по крену и тангажу, отличающаяся тем, что, с целью повышения удобства управления и безопасности полета, ось вращения рукоятки совмещена с осью направляющей каретки, при этом кинематическая связь с датчиком положения по крену выполнена в виде подпружиненного водила, соединенного с корпусом датчика и установленного на кронштейне, жестко соединенном с кареткой, и зубчатой передачи, шестерня, которой закреплена на входном звене датчика, а колесо - на торце опоры поворотной рукоятки, а кинематическая связь с датчиком положения по тангажу выполнена в виде подпружиненного водила, установленного на корпусе, одноплечей качалки, соединенной через тягу с кареткой, и зубчатой передачи, включающей шестерню, закрепленную на входном валу датчика и зубчатый сектор, установленный на качалке, при этом качалка шарнирно соединена с загрузочным цилиндром тангажа, шарнирно закрепленным на корпусе, а опора поворотной рукоятки выполнена подпружиненной.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Машина для выделения семян из плодов тунга и тому подобных культур | 1952 |
|
SU95763A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
