Изобретение относится к радиолокации и может быть использовано в тех областях, где возникает необходимость измерения временного положения видеоимпульса при любом соотношении между амплитудой сигнала и динамическим диапазоном приемника, в частности и при превышении амплитудой сигнала динамического диапазона приемника.
Цель изобретения - повышение точности определения временного положения видеоимпульса при любом соотношении между амплитудой сигнала и динамическим диапазоном приемника для видеоимпульсов, у которых задний фронт является зеркальным отображением переднего фронта, сжатым или растянутым во времени.
Математически сущность предлагаемого способа заключается в том, что осуществляют линейную аппроксимацию переднего и заднего фронтов видеоимпульса по двум точкам, получаемым в моменты пересечения последними двух следящих порогов измерения, экстраполируют полученные прямые до взаимного пересечения и используют абсциссу точки пересечения в качестве временного положения видеоимпульса.
Найдем соотношение, позволяющее определить абсциссу точки пересечения аппроксимирующих прямых.
Уравнение прямой, проходящей через две точки переднего фронта, может быть представлено в виде:
V1(t)=  , где V1(t) - аналитическое представление переднего фронта видеоимпульса;
, где V1(t) - аналитическое представление переднего фронта видеоимпульса;
t1, t2 - моменты пересечения передним фронтом видеоимпульса следящих порогов V1 = λ1 Vm, V2 = λ2 Vm соответственно;
λ1, λ2 - относительные уровни измерения, причем 0 < λ1 < λ2 < 1.
Vm - максимальное значение видеоимпульса.
Аналогично уравнение прямой, проходящей через две точки заднего фронта
V2(t)=  , где V2(t) - аналитическое представление заднего фронта видеоимпульса;
, где V2(t) - аналитическое представление заднего фронта видеоимпульса;
t3, t4 - моменты пересечения задним фронтом видеоимульса следящих порогов V2 и V1 cоответственно.
Учитывая, что в точке пересечения to аппроксимирующих прямых ординаты одинаковы, т.е. V1(to) - V2(to), определим
to= 
При этом достигается поставленная цель изобретения для указанного в ней класса видеоимпульсов, передний и задний фронты которых в этом случае можно представить соответственно в виде
V1(t) = Vmϕ1[α(tm-t)],
V2(t) = Vmϕ1[α(t-tm)] где ϕ1(˙) - аналитическое представление переднего фронта нормированного видеоимпульса;
α- масштабирующий множитель с размерностью частоты;
tm - абсцисса максимума видеоимпульса;
К - коэффициент, учитывающий сжатие (растяжение) заднего фронта видеоимпульса по отношению к переднему фронту.
В момент t1 пересечения передним фронтом видеоимпульса первого следящего порога выполняется равенство:
V2(t1) = V1.
Или после подстановки значений
Vm · ϕ1[α(tm-t1)] = V1.
Откуда
t2=tm-

 /α=tm-a,, где ϕ1-1 - функция, обратная ϕ
/α=tm-a,, где ϕ1-1 - функция, обратная ϕ
a=

 /α...
/α...
Аналогично определим моменты t2, t3, t4 пересечения передним фронтом видеоимпульса второго следящего порога, задним фронтом второго и первого следящих порогов соответственно:
t2=tm-

 /α=tm-b,,
/α=tm-b,,
t3=tm+

 /kα=tm+c,,
/kα=tm+c,,
t4= tm+

 /kα=tm+d,, где b=
/kα=tm+d,, где b=

 /α, c=
/α, c=

 /kα, d=
/kα, d=

 /kα.
/kα.
Подставим найденные значения моментов пересечения передним и задним фронтами видеоимпульса двух следящих порогов в выражение для определения временного положения видеоимпульса по предлагаемому способу:
to= 
Раскроем скобки и приведем подобные члены в последнем выражении:
to= tm+ 
Нетрудно убедиться с учетом введенных обозначений, что ас - bd = 0, Окончательно
to = tm.
Таким образом, для видеоимпульсов, у которых задний фронт является зеркальным отображением переднего фронта, сжатым или растянутым во времени, предложенный способ обеспечивает оценку временного положения видеоимпульса, не зависящую от отношения V1/Vm и V2/Vm, т.е. неизменную при любых выбранных порогах измерения.
В случае попадания амплитуды входного сигнала в динамический диапазон приемника в качестве порогов измерения используются значения V1= λ1 Vm и V2 = λ2 Vm. В случае превышения амплитудой входного сигнала динамического диапазона приемника происходит ограничение видеоимпульса сверху. Максимальное значение видеоимпульса совпадает в этом случае с верхней границей динамического диапазона приемника и в качестве порогов измерения используются значения V1 = λ1 Vg и V2 = λ2 Vg, где Vg - значение верхней границы динамического диапазона приемника.
Но оценка временного положения видеоимпульса по предложенному способу в любом из рассмотренных случаев остается неизменной. В то же время способ - прототип обеспечивает неизменность оценки временного положения видеоимпульса при превышении амплитудой входного сигнала динамического диапазона приемника только для сигналов с линейным фронтом.
Формирование следящих порогов требует задержки видеоимпульса на время tc не меньшее, чем априорно известное время достижения видеоимпульсом максимального значения. С учетом этого и приведенных выше выкладок физическая сущность предлагаемого способа заключается в том, что формируют шкалу времени, фиксируют максимальное значение видеоимпульса Vm, формируют первый V1 = λ1 Vm и второй V2 = λ2 Vmследящие пороги, 0 < λ1 < λ2 < 1 задерживают видеоимпульс на время tc, не меньшее, чем априорно известное время достижения видеоимпульсом максимального значения, сравнивают значение переднего фронта задержанного видеоимпульса с первым следящим порогом и в момент пересечения передним фронтом этого порога формируют первый сигнал сравнения, которым фиксируют значение времени t1 по шкале времени, сравнивают значение переднего фронта задержанного видеоимпульса с вторым следящим порогом и в момент пересечения передним фронтом второго следящего порога формируют второй сигнал сравнения, которым фиксиpуют значение времени t2 по шкале времени, сравнивают значение заднего фронта задержанного видеоимпульса с вторым следящим порогом и в момент пересечения этого порога задним фронтом формируют третий сигнал сравнения, которым фиксируют значение t3 по шкале времени, сравнивают значение заднего фронта задержанного видеоимпульса с первым следящим порогом и в момент пересечения задним фронтом этого порога формируют четвертый сигнал сравнения, которым фиксируют значение времени t4 по шкале времени, определяют временное положение видеоимпульса to по формуле
to=  _ tc,
_ tc,
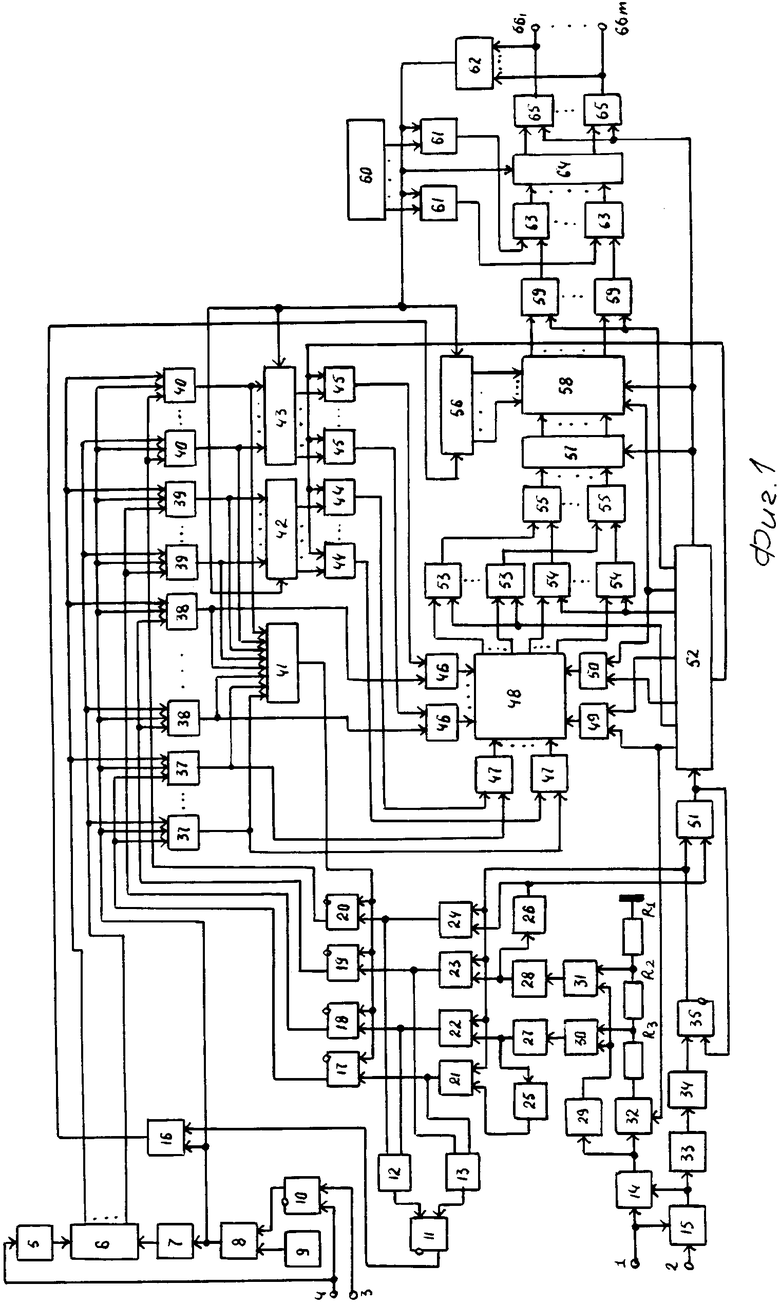
На фиг.1 приведена структурная схема устройства для осуществления способа.
Устройство содержит вход 1 подачи напряжения видеоимпульса, вход 2 подачи напряжения порога обнаружения, вход 3 "Пуск" устройства, вход 4 "Стоп" устройства, элемент задержки 5, счетчик импульсов 6, элемент задержки 7, элемент И 8, генератор импульсов 9, триггеры 10, 11, элементы ИЛИ 12, 13, ключ 14, компаратор 15, элемент И 16, триггеры 17-20, элементы И 21-24, инверторы 25, 26, элементы дифференцирования 27, 28, элемент задержки 29, компараторы 30, 31, пиковый детектор 32, элемент дифференцирования 33, элемент задержки 34, триггер 35, делитель напряжения 36 из последовательно соединенных резисторов R1, R2, R3, группу элементов И 37, группу элементов И 38, группу элементов И 39, группу элементов И 40, элемент ИЛИ 41, регистры 42, 43, группу элементов И 44, группу элементов И 45, группу элементов ИЛИ 46, группу элементов ИЛИ 47, блок умножения 48, элементы ИЛИ 49, 50, элемент И 51, элемент задержки 52, группу элементов И 53, группу элементов И 54, группу элементов ИЛИ 55, счетчик 56, накапливающий сумматор 57, блок деления 58, группу элементов И 59, регистр 60, группу элементов И 61, элемент ИЛИ 62, группу элементов ИЛИ 63, накапливающий сумматор 64, группу элементов И 65, группу выходов 661-66m устройства, где m - разрядность кода времени. Блок умножения 48 и блок деления 58 могут быть выполнены по схеме постоянного запоминающего устройства матричного типа.
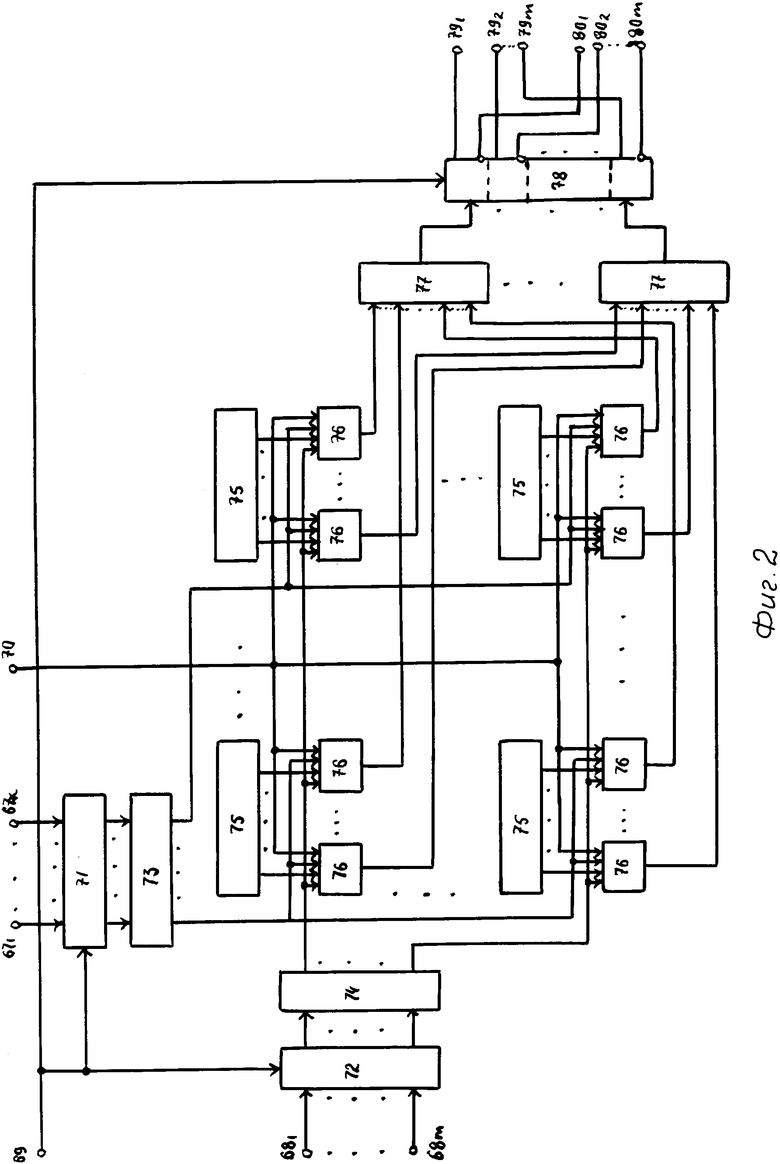
На фиг.2 приведена структурная схема указанных блоков.
Она содержит входы 671-67к подачи кода первого числа, входы 681-68к подачи второго числа, где к - разрядность чисел, установочный вход 69, инициирующий вход 70, регистры 71, 72, дешифраторы 73, 74, группу регистров 75, по числу регистров 75 группы элементов И 76, группу элементов ИЛИ 77, регистр 78, выходы выдачи результата в прямом коде 791-79m, выходы выдачи результата в обратном коде 801-80m.
В блоке деления 58 отсутствуют регистры 71 и 72. Их роль выполняют счетчик 56 и сумматор 57.
Устройство работает следующим образом.
В исходном состоянии триггеры 10, 11, 17, 18, 19, 20, 35 обнулены. Нулевой уровень с прямого выхода триггера 10 закрывает элемент И 8, блокируя дальнейшее распространение импульсов с выхода запущенного генератора импульсов 9. Нулевой уровень с прямого выхода триггера 11 закрывает элемент И 16. Нулевые уровни с прямых выходов триггеров 17-20 закрывают соответственно элементы И 37, 39, 38, 40. Нулевой уровень с прямого выхода триггера 35 закрывает элементы И 21, 22, 23, 24, 51. На вход 2 устройства подается напряжение порога обнаружения, что приводит к появлению на выходе компаратора 15 нулевого уровня, который размыкает ключ 14. Пиковый детектор 32 обнулен, на выходах компараторов 30 и 31 произвольные уровни, которые могут изменяться под воздействием шумов. Импульсы, формируемые при изменении уровней элементами дифференцирования 27 и 28, гасятся закрытыми элементами И 21, 22, 23, 24, 51. Регистры 42, 43, счетчики 6, 56, сумматоры 57, 64 обнулены. В регистр 60 и сумматор 64 занесен обратный код значения (-1)tc, где tc - время задержки элемента задержки 29, В блоке умножения 48 обнулены регистры 71 и 72, в регистры 75 занесены коды результатов операции умножения двух к-разрядных чисел. В блоке деления 58 в регистры 75 занесены коды результатов операции деления двух к-разрядных чисел (входы начальных установок и входы занесения на чертеже не показаны).
В начале измерений на вход 3 "Пуск" устройства подается импульс, который переводит триггер 10 в единичное состояние. Единичный уровень с прямого выхода триггера 10 открывает элемент И 8 и импульсы с выхода генератора импульсов 9 подсчитываются в счетчике 6. Формируется шкала дискретного времени.
При превышении напряжением фронта видеоимпульса, поступающим на вход 1, напряжения порога обнаружения на выходе компаратора 15 формируется единичный положительный перепад напряжения и устанавливается единичный уровень. Из единичного перепада напряжения элемент дифференцирования 33 формирует импульс положительной полярности, поступающий на вход элемента задержки 34. Единичный уровень с выхода компаратора 15 замыкает ключ 14, что обеспечивает поступление напряжения видеоимпульса на входы элемента задержки 29 и пикового детектора 32. Пиковый детектор 32 отслеживает текущее значение напряжения фронта видеоимпульса, фиксирует его максимальное значение Vm и подает его на вход делителя напряжения 36. При этом в общей точке резисторов R1 и R2формируется напряжение первого следящего порога V1 = λ1 Vm, которое подается на первый вход компаратора 31, а в общей точке резисторов R2 и R3 - напряжение второго следящего порога V2 =λ2 Vm, которое подается на первый вход компаратора 30. Появление напряжений следящих порогов на первых входах компараторов 30 и 31 приводит к установлению на их выходах нулевых уровней.
В элементе задержки 29 видеоимпульс задерживается на время tc не меньшее, чем время достижения им максимального значения (априори известное), измеряемое по уровню порога обнаружения.
Время задержки элемента задержки 34 меньше времени задержки элемента задержки 29 на время срабатывания триггера 35. Импульс с выхода элемента задержки 34 переводит триггер 35 в единичное состояние. Единичный уровень с прямого выхода триггера 35 открывает элементы И 21, 22, 23, 24, 51. Напряжение задержанного видеоимпульса с выхода элемента задержки 29 поступает на вторые входы компараторов 30, 31.
При совпадении напряжения фронта задержанного видеоимпульса с напряжением первого следящего порога на выходе компаратора 31 формируется единичный положительный перепад напряжения, из которого элемент дифференцирования 28 формирует импульс положительной полярности. Сформированный импульс подается на вход инвертора 26, проходит через открытый элемент И 23 и переводит триггеры 19 и 11 (последний - через элемент ИЛИ 13) в единичное состояние. Импульс отрицательной полярности с выхода инвертора 26 гасится входными цепями диодной развязки элементов И 24, И 51 (на фиг.1 не показаны).
Единичный уровень с прямого выхода триггера 11 открывает элемент И 16. Единичный уровень с прямого выхода триггера 19 открывает элементы И 38.
Очередной ближайший импульс с выхода генератора импульсов 9 проходит через элементы И 8, 16 на счетный вход счетчика 56, а также считывает с разрядных выходов счетчика 6 код времени t1 и через элементы И 38, ИЛИ 46 заносит его в регистр 71 блока умножения 48.
Импульсы с выходов элементов И 38 объединяются элементом ИЛИ 41 и полученный импульс обнуляет триггер 19.
Импульс с выхода элемента И 8 задерживается элементом задержки 7 на время считывания кода времени с разрядных выходов счетчика 6, после чего подается на счетный вход последнего, увеличивая его значение на единицу.
Нулевой уровень с прямого выхода триггера 19 закрывает элементы И 38. Последующие импульсы с выхода элемента И 8 проходят через элемент И 16 и продолжают подсчитываться в счетчике 56.
При совпадении напряжения фронта задержанного видеоимпульса с напряжением второго следящего порога на выходе компаратора 30 формируется единичный положительный перепад напряжения, из которого элемент дифференцирования 27 формирует импульс положительной полярности. Сформированный импульс подается на вход инвертора 25, проходит через открытый элемент И 22 и переводит триггер 18 в единичное состояние, а триггер 11 (через элемент ИЛИ 12) - в нулевое состояние.
Нулевой уровень с прямого выхода триггера 11 закрывает элемент И 16, что обеспечивает фиксацию в счетчике 56 кода разности времен t2-t1.
Единичный уровень с прямого выхода триггера 18 открывает элементы И 39. Импульс отрицательной полярности с выхода инвертора 25 гасится входными цепями диодной развязки элемента И 21 (на фиг.1 не показаны).
Очередной ближайший импульс с выхода элемента И 8 считывает с разрядных выходов счетчика 6 код времени t2 и через элементы И 39 заносит его в регистр 42. Импульсы с выходов элементов И 39 объединяются элементом ИЛИ 41 и полученный импульс обнуляет триггер 18. Нулевой уровень с прямого выхода триггера 18 закрывает элементы И 39.
При совпадении напряжения спада видеоимпульса с напряжением порога обнаружения на выходе компаратора 15 формируется единичный отрицательный перепад напряжения и устанавливается нулевой уровень. Из перепада элемент дифференцирования 33 формирует импульс отрицательной полярности, который в дальнейшем гасится входными цепями диодной развязки триггера 35 (на фиг.1 не показаны). Нулевой уровень с выхода компаратора 15 размыкает ключ 14.
При совпадении напряжения спада задержанного видеоимпульса с напряжением второго следящего порога на выходе компаратора 30 формируется единичный отрицательный перепад напряжения, из которого элемент дифференцирования 27 формирует импульс отрицательной полярности. Сформированный импульс гасится входными цепями диодной развязки элемента И 22 (на фиг.1 не показаны), инвертированный инвертором 25 проходит через элемент И 21 и переводит триггеры 17 и 11 (последний - через элемент ИЛИ 13) в единичное состояние.
Единичный уровень с прямого выхода триггера 11 открывает элемент И 16. Единичный уровень с прямого выхода триггера 17 открывает элементы И 37.
Очередной ближайший импульс с выхода генератора импульсов 9 проходит через элементы И 8, 16н на счетный вход счетчика 56, а также считывает с разрядных выходов счетчика 6 код времени t3 и через элементы И 37, ИЛИ 47 заносит его в регистр 72 блока умножения 48. Импульсы с выходов элементов И 37 объединяются элементом ИЛИ 41 и полученный импульс обнуляет триггер 17. Нулевой уровень с прямого выхода триггера 17 закрывает элементы И 37. Последующие импульсы с выхода элемента И 8 проходят через элемент И 16 и продолжают подсчитываться в счетчике 56.
При совпадении напряжения спада задержанного видеоимпульса с напряжением первого следящего порога на выходе компаратора 28 формируется единичный отрицательный перепад напряжения, из которого элемент дифференцирования 28 формирует импульс отрицательной полярности. Сформированный импульс гасится входными цепями диодной развязки элемента И 23 (на фиг.1 не показаны), инвертированный инвертором 26 проходит на выход элемента И 51, проходит через элемент И 24 и переводит триггер 20 в единичное состояние, а триггер 11 (через элемент ИЛИ 12) в нулевое состояние.
Нулевой уровень с прямого выхода триггера 11 закрывает элемент И 16, что обеспечивает фиксацию в счетчике 56 кода t2-t1+t4-t3, который с его разрядных выходов подается на входы дешифратора 73 блока деления 58.
Единичный уровень с прямого выхода триггера 20 открывает элементы И 40.
Очередной ближайший импульс с выхода элемента И 8 считывает с разрядных выходов счетчика 6 код времени t4 и через элементы И 40 заносит его в регистр 43.
Импульсы с выходов элементов И 40 объединяются элементом ИЛИ 41 и полученный импульс обнуляет триггер 20. Нулевой уровень с прямого выхода триггера 20 закрывает элементы И 40.
Импульс с выхода элемента И 51 поступает на вход элемента задержки 52 и переводит триггер 35 в нулевое состояние. Нулевой уровень с прямого выхода триггера 35 закрывает элементы И 21, 22, 23, 24, 51.
Задержанный на время переключения триггера 35 импульс с первого отвода элемента задержки 52 обнуляет пиковый детектор 32 и через элемент ИЛИ 49 поступает на инициирующий вход 70 блока умножения 48. Это приводит к выдаче результата умножения кодов t1 x t3 из соответствующего регистра 75 через соответствующую группу элементов И 76 и элемента ИЛИ 77 в регистр 78.
Дополнительно задержанный на время переходных процессов в блоке умножения 48 импульс с второго отвода элемента задержки 52 считывает обратный код результата (-1) x t1 x t3 с выходов 801-80m блока умножения 48 и через элементы И 53, ИЛИ 55 заносит его в сумматор 57.
Дополнительно задержанный на время считывания импульс с третьего отвода элемента задержки 52 через элемент ИЛИ 50 поступает на установочный вход 69 блока умножения, где обнуляет регистры 71, 72, 78.
Дополнительно задержанный на время начальных установок, импульс с четвертого отвода элемента задержки 52 считывает коды времени t2 и t4 из регистров 42 и 43 соответственно и через элементы И 44, ИЛИ 47 и И 45, ИЛИ 46 заносит его в регистры 72 и 71 блока умножения 48 соответственно.
Дополнительно задержанный на время считывания импульс с пятого отвода элемента задержки 52 через элемент ИЛИ 49 поступает на инициирующий вход 70 блока умножения 48. Это приводит к выдаче результата умножения кодов t2 x t4 из соответствующего регистра 75 через соответствующую группу элементов И 76 и элемента ИЛИ 77 в регистр 78.
Дополнительно задержанный на время переходных процессов в блоке умножения 48 импульс с шестого отвода элемента задержки 52 считывает прямой код результата t2 x t4 с выходов 791-79m блока умножения 48 и через элементы И 54, ИЛИ 55 подает его на счетные входы сумматора 57, работающего в режиме накопления. Это приводит к формированию на разрядных выходах сумматора 57 кода величины t2 x t4 - t1 x t3, который подается на входы дешифратора 74 блока деления 58.
Дополнительно задержанный на время считывания и на время выполнения операции сложения в сумматоре 57 импульс с седьмого отвода элемента задержки 52 через элемент ИЛИ 50 производит начальные установки в блоке умножения 48 и подается на инициирующий вход 70 блока деления 58. Это приводит к выдаче в регистр 78 блока деления 58 кода результата операции деления
Дополнительно задержанный на время переходных процессов в блоке деления 58 импульс с восьмого отвода элемента задержки 52 считывает прямой код результата операции деления с выходов 791-79m блока деления и через элементы И 59, ИЛИ 63 подает его на счетные входы сумматора 64, работающего в режиме накопления. Это приводит к формированию на разрядных выходах сумматора 64 кода временного положения видеоимпульса
to=  - tc
- tc
Дополнительно задержанный на время считывания и на время выполнения операции сложения в сумматоре 64 импульс с выхода элемента задержки 52 производит начальные установки сумматора 57 и блока деления 58, считывает с разрядных выходов сумматора 64 код временного положения видеоимпульса и через элементы И 65 выдает его на выходы 661-66mустройства.
Импульсы с выходов элементов И 65 объединяются элементом ИЛИ 62 и полученный импульс обнуляет регистры 42, 43, 56, сумматор 64, а также считывает из регистра 60 обратный код значения (-1)tc и через элементы И 61, ИЛИ 63 заносит его в сумматор 64.
Устройство готово к определению временного положения очередного видеоимпульса.
По завершению измерений на вход 4 "Стоп" устройства подается импульс, который поступает на вход элемента задержки 5 и переводит триггер 10 в нулевое состояние. Нулевой уровень с прямого выхода триггера 10 закрывает элемент И 8.
Время задержки элемента задержки 5 больше времени задержки элемента задержки 7 на время переходных процессов счетчика 6. Импульс с выхода элемента задержки 5 обнуляет счетчик 6. Устройство в исходном состоянии.
Введение новых операций при предлагаемом способе позволяет по сравнению со способом-прототипом повысить точность определения временного положения видеоимпульса при любом соотношении между амплитудой видеоимпульса и динамическим диапазоном приемника для видеоимпульсов, у которых задний фронт является зеркальным отображением переднего фронта, сжатым или растянутым во времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения временного положения видеоимпульсов | 1989 |
|
SU1698835A1 |
| Способ определения временного положения видеоимпульсов | 1988 |
|
SU1636829A1 |
| Двухпороговый экстраполяционный способ определения временного положения видеоимпульсов | 1988 |
|
SU1596300A1 |
| Четырехпороговый экстраполяционный способ определения временного положения видеоимпульсов и устройство для его осуществления | 1989 |
|
SU1723561A1 |
| Способ определения временного положения видеоимпульсов | 1988 |
|
SU1619202A1 |
| Устройство для определения временного положения максимума и измерения амплитуды треугольных видеоимпульсов | 1989 |
|
SU1688198A1 |
| Устройство для определения центра площади видеоимпульсов | 1987 |
|
SU1492342A1 |
| Устройство для определения центра площади квазисимметричных видеоимпульсов | 1987 |
|
SU1492312A1 |
| Способ определения относительного уровня измерения временных параметров видеоимпульсов | 1987 |
|
SU1483397A1 |
| Способ определения порога измерения временных параметров импульсов | 1990 |
|
SU1775687A1 |
Использование: радиолокация. Сущность изобретения: пеленгационный способ определения временного положения видеоимпульса включает формирование шкалы времени, фиксацию максимального значения видеоимпульса, формирование следящих порогов, сравнение с ними значений фронта и спада, фиксацию моментов пересечения видеоимпульсом следящих порогов с последующим вычислением временного положения видеоимпульса. 2 ил.
Пеленгационный способ определения временного положения видеоимпульса, заключающийся в том, что формируют шкалу времени, фиксируют максимальное значение видеоимпульса vm, формируют первый v1 = λ1vm и второй v2 = λ2vm следящие пороги, 0 << λ1 << λ2 << 1 , задерживают видеоимпульс на время tc не меньшее, чем априорно известное время достижения видеоимпульсом максимального значения, сравнивают значение переднего фронта задержанного видеоимпульса с первым следящим порогом и в момент пересечения передним фронтом этого порога формируют первый сигнал сравнения, которым фиксируют значение времени t1 по шкале времени, сравнивают значение переднего фронта задержанного видеоимпульса с вторым следящим порогом и в момент пересечения передним фронтом второго следящего порога формируют второй сигнал сравнения, которым фиксируют значение времени t2 по шкале времени, отличающийся тем, что, с целью повышения точности определения временного положения при любом соотношении между амплитудой видеоимпульса и динамическим диапазоном приемника для видеоимпульсов, у которых задний фронт является зеркальным отображением переднего фронта, сжатым или растянутым во времени, сравнивают значение заднего фронта задержанного видеоимпульса с вторым следящим порогом и в момент пересечения этого порога задним фронтом формируют третий сигнал сравнения, которым фиксируют значение времени t3по шкале времени, сравнивают значение заднего фронта задержанного видеоимпульса с первым следящим порогом и в момент пересечения задним фронтом этого порога формируют четвертый сигнал сравнения, которым фиксируют значение времени t4 по шкале времени, определяют временное положение видеоимпульса t0 по формуле to=  _ tc, .
_ tc, .
| Павлов В.Д | |||
| Определение временного положения видеоимпульсов по двум точкам переднего фронта | |||
| Известия вузов СССР | |||
| Радиоэлектроника, 1971, т.24, N 12, с.1470. |
