Изобретение относится к измерительной технике и может быть использовано в радиолокации.
Цель изобретения - повышение точности измерения временного положения видеоимпульсов.
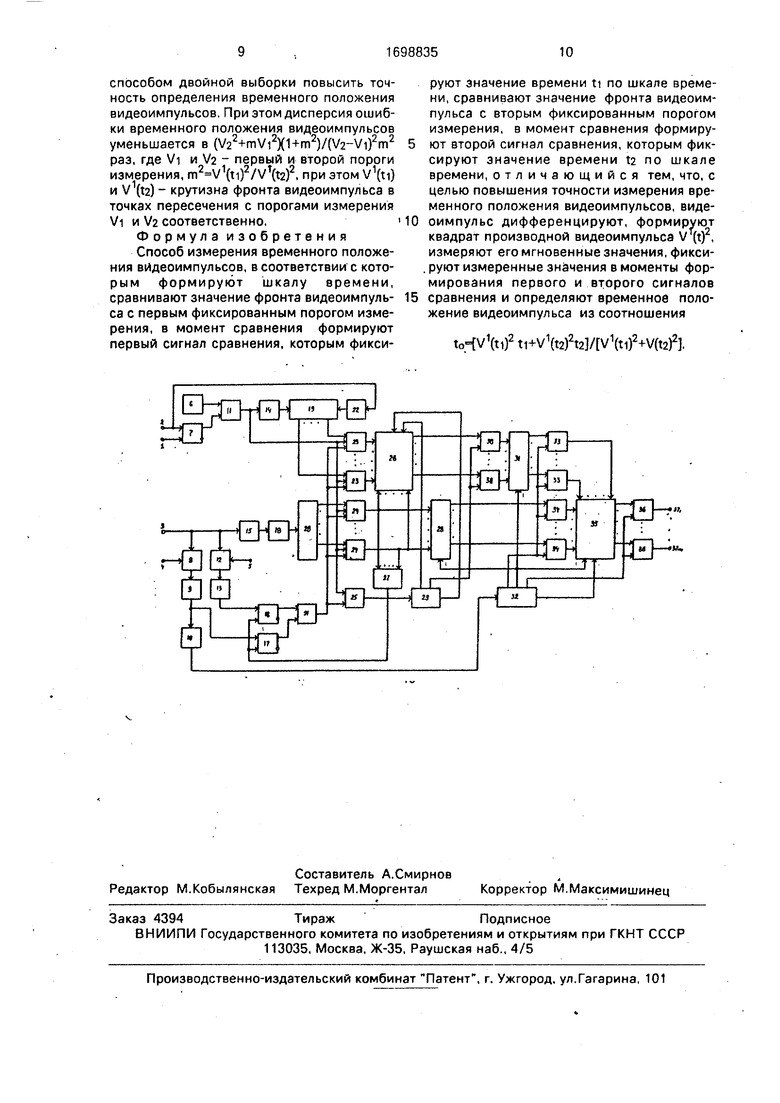
На чертеже изображена структурная схема устройства, реализующего способ.
Сущность способа заключается в том, что формируют шкалу времени, дифференцируют видеоимпульс, формируют квадрат производной видеоимпульса и измеряют его значения, сравнивают значение фронта видеоимпульса с первым фиксированным порогом измерения, в момент сравнения формируют первый сигнал сравнения, которым фиксируют значение времени ti по шкале времен и и значение квадрата производной видеоимпульса V (ц) .сравнивают значение Фронта видео импульса с
вторым фиксированным порогом измерения, в момент сравнения формируют второй сигнал сравнения, который фиксируют значение времени t2 по шкале времени и значение квадрата производной v (t2)2, определяют временное положение видеоимпульса из соотношения
to
V (t1 У t 1 + V (
v (ti)2+vr(t2)2
Покажем, что новый способ обеспечивает уменьшение погрешности измерения Для этого представим выражение для определения временного положения видеоимпульса по способу-прототипу в виде
t 1 V 2 J i - V 1 t 1
vT-V-i
t о
О
ю
00 СО
CJ
ел
t VLCJJLL O
t1 v:-Vi
где Vi, /2 - значение фут- ими V(t) в МОМРНТ ы ti, t2
Таким образом, временное положение видеоимпульса смещено влево относительно точки ti на некоторую часть интервала () Выберем в качестве смещения некоторую другую часть интервала (), т.е. определим временное положение видеоимпульса как
t.t V2(t2-4) 1 ol i 1 „ / ,
Vit2
n(V2-Vi) t i (Van -Vm 4-Vi )
(V2-Vi)n При широкополосном приеме, когда
(Ткор 1/Af упч ) « 7фр, где Гкор интервал корреляции шума, -ширина полосы пропускания усилителя промежуточной частоты, гфр - длительность фронта видеоимпульса, аддитивный гауссов шум в моменты ti и t2 можно считать некоррелированным. Тогда дисперсия последнего выражения может быть записана в виде
a C3t2,(Vih-V,n + V1)l+vfGitIL
;
,Ч
G.
-о
0/а-V, )V
где и - дисперсия ошибок фиксации моментов времени ti и t2, вызванных аддитивным гауссовым шумом,
Пусть пл2(Т21 и V2-Vi a, тогда
для нахождения минимума последнего выражения продифференцируем его по свободной переменной п и результат приравняем к нулю
v,1+vIi±±Hl)) 0.
а п
а п
Равенство нулю первого сомножителя обеспечивается при п - оо , что дает значение и приводит к известному способу определение временного положения видеоимпульса по моменту пересечения фронта с фиксированным порогом.
Равенство нулю второго сомножителя обеспечиваетсяпри
V т (1 -f m2) Vi (1 +т2) naV2-Vi
Подставляя полученное значение в вы2
ражения для определения toi tftoi получим соответственно
toi t 1 +
V 1 (t 2 - 11 ) ( V 2 - V 1 )
(V2-Vi)Vi(1 +m2)
11m +t2 1 4-m2
7201 г п
m
1 +m
Дисперсия ошибки определения временного положения видеоимпульса по способу- прототипу при рассмотренных условиях равна
л ч
6v
V +rYiVf
. (v2-v()7.
Дисперсия ошибки рассматриваемого способа будет меньше дисперсии ошибки способа-прототипа t если будет выполнено условие
( ) 1. Подставляя значение дисперсий ошибок
(УЗ+т2У2)(1 +™2)1
( V 2 - V 1 )2 m 2
последнее неравенство приводим к виду (V2+m2Vi) 0.
Таким образом, дисперсия ошибки определения временного положения по новому способу всегда меньше дисперсии ошибки , определения временного положения по способу-прототипу.
Учитывая, что дисперсии ошибок фиксации моментов пересечения видеоимпульсом фиксированных порогов можно представить в виде
„2 Лш. пг0ш
-ТЧТТ 1 а 2 7чТ7Г
где (72, - дисперсия аддитивного шума;
V1(ti), V (t2) - крутизна фронта видеоим- пульса в точках ti и ta соответственно, определим
(ti)2/V1(t2)2. Окончательно получаем
ТП1 V1(tQ2t1+V1(t2)2t2 Т°1V1(ti)2+V1(t2)2
Устройство содержит шину 1 Пуск,
шину 2 Стоп, шину 3 подачи напряжения
видеоимпульса, шину 4 подачи напряжения
первого, порога измерения Vi, шину 5 под
ачи напряжения второго порога измерения V2, генератор 6 импульсов, первый триггер 7, первый компаратор 8 первый элемент 9 дифференцирования, инвертор 10, первый элемент И 11, второй компаратор 12, второй элемент 13 дифференцирования, первый элемент 14 задержки,третий элемент 15 дифференцирования, второй 16 и третий 17 триггеры, квадратор 18, счетчик 19 импульсов, аналого-цифровой преобразователь 20, первый элемент ИЛИ 21, второй элемент 22 задержки, первую 23 и вторую 24 группы элементов И, элемент И 25, блок 26 умножения, второй элемент ИЛИ 27, первый накапливающий сумматор 28, третий элемент 29 задержки, третью группу элементов И 30, второй накапливающий сумматор 31, четвертый элемент 32 задержки, четвертую 33 и пятую 34 группы элементов И, блок 35 деления, шестую группу элементов И 36, выходные шины 37,1-37.т, где т
-разрядность кода времени. Причем шина 1 соединена с единичным входом триггера 7, шина 2 соединена с нулевым в ходом триггера 7 и с входом элемента 22, выход генератора 6 соединен с первым входом элемента И 11, второй вход которого соединен с прямым выходом триггера 7, а
-с входом элемента 14, с первым входом элемента И 25 и с первыми входами всех элементов И 23 и 24. Выходы элементов 14 и 22 соединены соответственно со счетным и обнуляющим входами счетчика 19, разрядные выходы которого соединены с вторыми входами соответствующих элементов И 23. Шина 3 соединена с первыми входами компараторов 8 и 12 и с входом элемента 15, выход которого через квадратор 18 соединен с входом АЦП 20, разрядные выходы которого соединены с вторыми входами соответствующих элементов И 24, Шина 4 соединена с вторым входом компаратора 8, выход которого соединен с входом элемента 9 , выход которого соединен с единичным входом триггера 16. Прямые.выходы триггеров 16 и 17 объединены элементом ИЛИ 21, выход которого соединен с третьими входами всех элементов И 23 и 24 и с вторым входом элемента И 25, выход которого соединен с входом элемента 29. Выходы элементов И 23 соединены с первой группой входов блока 26. Выходы элементов И 24 соединены с второй группой входов блока 26, со счетными входами сумматора 28 и объединены элементом ИЛИ 27, выход которого соединен с нулевыми входами триггеров 16 и 17. Разрядные выходы блока 26 соединены с первыми входами соответствующих элементов И 30. Первый отвод элемента 29 соединен с тактовым входом блока 26, второй отвод - с вторыми входами всех элементов И 30. а выход - с установочным входом блока 26. Выходы элементов И 30 соединены со счетными входами сумматора 31, разрядные выходы сумматоров 31 и 28
соединены с первыми входами одноименных элементов И 33 и 34 соответственно, выходы которых соединены соответственно с первой и второй группами входов блока 5 35, разрядные выходы которого соединены с первыми входами соответствующих элементов И 36, выходы которых являются выходными шинами 37.1-37.гл. Первый отвод элемента 32 соединен с вторыми входами
10 всех элементов И 33 и 34, второй отвод - с
обнуляющими входами сумматоров 28 и 31
и с инициирующим входом блока 35, третий
.отвод - с вторыми входами всех элементов
И 36, а выход - с установочным входом бло15 ка 35.
Блок 26 умножения и блок 35 деления могут быть выполнены в виде блоков постоянной памяти, адресные входы которых разделены на две группы, причем на обеих
0 группах входов и на выходах включены регистры,
Устройство работает следующим образом.
В исходном состоянии на шины 4 и 5
5 подают напряжения первого и второго порогов измерения соответственно. На выходах компараторов 8 и12 - нулевые уровни. Триггеры 7, 16 и 17, счетчик 19, накапливающие сумматоры 28 и 31 обнулены.-Входы
0 начальных установок на чертеже не показаны. Нулевой уровень с прямого выхода триггера 7 закрывает элемент И 11.Генератор б запущен. Нулевые уровни с прямых выходов триггеров 16 и 17 приводят к нулевому
5 уровню на выходе элемента И ПИ 21, который запирает элементы И 23, 24 и 25. В блоках 26 умножения и 35 деления обнулены входные и выходные регистры.
Начало измерений сопровождается по0 ступлением сигнала Пуск на шину, который переводит триггер 7 в единичное состояние. Единичный уровень с прямого выхода триггера 7 открывает элемент И 11 и импульсы с выхода генератора 6 подсчиты5 ваются в счетчике 19 (формируется дискретная шкала времени).
Напряжение видеоимпульса подается на шину 3-, дифференцируется элементом 15 и полученное напряжение возводится в
0 квадрат квадратором 18, после чего преобразуется в цифровую форму с помощью АЦП 20 (формируется текущее значение квадрата производной.видеоимпульса V (t) ).
При совпадении напряжения фронта
5 видеоимпульса с напряжением первого порога измерения V i на выходе компаратора 8 появляется единичный положительный перепад напряжения, из которого элементом 9 дифференцирования формируется положительный импульс (первый сигнал
сравнения), который переводит триггер 17 в единичное состояние. Отрицательный импульс с выхода инвертора 10 гасится входной цепью диодной развязки элемента 32 задержки (не показана), Единичный уровень на прямом выходе триггера 17 приводит к появлению единичного уровня на выходе элемента ИЛИ 21, который открывает те из элементов И 23 и 24, на вторых входах которых присутствуют единичные уровни с раз- рядных выходов счетчика 19 и АЦП 20 соответственно, а также элемент И 25.
Очередной ближайший импульс с выхода генератора 6 проходит через элемент И 11, подается на элементы 14 и 29, а также считывает через элементы И 23 с разрядных выходов счетчика 19 значение времени ц и через элементы И 24 значение квадрата производной огибающей V1(ti)2 с.разрядных выходов АЦП 20. Коды считанных значений подаются на входы блока 26 (заносятся в адресные регистры), а код значения V1(ti), кроме того, подается на входы накапливающего сумматора 28.
Из кодовых импульсов на выходе эле- ментов И 24 элемент ИЛИ 27 формирует импульс, который обнуляет триггер 17, что приводит к появлению нулевого уровня на выходе элемента ИЛИ 21, который закрывает элементы И 23, 24 и 25.
Задержанный на время считывания импульс с выхода элемента 14 увеличивает значение счетчика 19 на единицу.
Задержанный на время занесения кодов в регистры блока 26 импульс, с первого отвода элемента 29 поступает на тактовый вход блока 26 умножения, считывает результат умножения ti V (ti) из постоянного запоминающего блока и заносит его в выходной регистр блока 26 умножения.
Дополнительно задержанный на время переходных процессов в блоке 26 импульс с второго отвода элемента 29 считывает результат умножения tiV1(ti)2 с блока 26 и через элементы И 30 заносит его в накапли- вающий сумматор 31,
Дополнительно задержанный на время считывания импульс с выхода элемента 29 поступает на установочный вход блока 26 и обнуляет его входные и выходные регистры.
При совпадении напряжения фронта видеоимпульса с напряжением второго порога измерения на выходе компаратора 12 появляется единичный положительный перепад напряжения, из которого элемент 13 формирует положительный импульс (второй сигнал сравнения), который переводит триггер 16 в единичное состояние. Это приводит к единичному уровню на выходе элемента ИЛИ 21, который открывает элементы И 23, 24 и 25.
Дальнейшая работа устройства аналогична описанной. При этом в накапливающем сумматоре 28 будет подсчитано значение V1(ti)2+V1(t2)2, а в накапливающем сумматоре 31 - значение V1(ti)2ti+V1(t2)2t2.
При совпадении напряжения спада видеоимпульса с напряжением второго порога измерения V2 на выходе компаратора 12 появляется единичный отрицательный перепад напряжения, из которого элемент 13 формирует отрицательный импульс, который гасится входной цепью диодной развязки триггера 16 (не показана).
При совпадении напряжения спада видеоимпульса с напряжением первого порога измерения на выходе компаратора 8 появляется единичный отрицательный перепад напряжения, из которого элемент 9 формирует отрицательный импульс, который гасится входной цепью диодной развязки триггера 17 и который, инвертированный инвертором 10, проходит на первый отвод элемента 32 и считывает коды с разрядных выходов накапливающих сумматоров 28 и 31, занося их через элементы И 34 и 33 соответственно в адресные регистры блока 35 деления,
Задержанный на время занесения импульс с второго отвода элемента 32 обнуляет накапливающие сумматоры 28 и 31, а также считывает результат деления V1(ti)2ti+V1(t2)(ti)2+V1(t2)2 из постоянного запоминающего блока и заносит его в выходной регистр блока 35.
Дополнительно задержанный на время считывания импульс с третьего отвода элемента 32 считывает результат деления с блока 35 и через элементы И 36 выдает его на выходные шины 37.1-37.rn.
Дополнительно задержанный на время выдачи импульс с выхода элемента 32 обнуляет регистры блока 35.
Устройство готово к измерению временного положения очередного видеоимпульса.
По завершении измерений на шину 2 устройства подается сигнал, который поступает на вход элемента 22 и переводит триггер 7 в нулевое состояние. Нулевой уровень с прямого выхода триггера 7 закрывает элемент И 11.
Время задержки элемента 22 больше времени задержки элемента 14 на время переходных процессов в счетчике 19. Импульс с выхода элемента 22 обнуляет счетчик 19.
Устройство в исходном состоянии.
Введение новых операций в предлагаемом способе позволяет по сравнению со
способом двойной выборки повысить точность определения временного положения видеоимпульсов. При этом дисперсия ошибки временного положения видеоимпульсов уменьшается в (V22+mVi2Xl+m2)/(V2-Vi)2m2 раз, где Vi и V2 - первый и второй пороги измерения, (г1)2/Ут{г2)2, при этом V1(ti) и V1(t2) - крутизна фронта видеоимпульса в точках пересечения с порогами измерения Vi и V2 соответственно.
Формула изобретения Способ измерения временного положения видеоимпульсов, в соответствии с которым формируют шкалу времени, сравнивают значение фронта видеоимпульса с первым фиксированным порогом измерения, в момент сравнения формируют первый сигнал сравнения, которым фикси10
15
руют значение времени ti по шкале времени, сравнивают значение фронта видеоимпульса с вторым фиксированным порогом измерения, в момент сравнения формируют второй сигнал сравнения, которым фиксируют значение времени т.2 по шкале времени, отличающийся тем, что, с целью повышения точности измерения временного положения видеоимпульсов, видеоимпульс дифференцируют, формируют квадрат производной видеоимпульса V (t)2, измеряют его мгновенные значения, фикси- . руют измеренные значения в моменты формирования первого и второго сигналов сравнения и определяют временное положение видеоимпульса из соотношения
to(V1(ti)2ti+V1(t2)(ti)2+V(t2)2.

Изобретение относится к измерительной технике и может быть использовано в радиолокации. Цель изобретения - повышение точности измерения временного положения видеоимпульсов. По способу, включающему формирование шкалы времени и формирование сигналов сравнения в моменты ti и t2 пересечения фронтом видеоимпульса первого и второго порогов измерения, дополнительно формируют квадрат производной видеоимпульса и фиксируют его значение в моменты времени ti и т.2, после чего рассчитывают момент to начала видеоимпульса по формуле, приведенной в описании изобретения 1 ил.
| Теоретические основы радиолокации./Под | |||
| ред | |||
| В.Е.Дулевича | |||
| - М.: Советское радио, 1964, с.319-320 | |||
| Потапов А.В., Чернявский А.Ф.Статистические методы измерений в экспериментальной ядерний физике | |||
| - М.: Атомиздат, 1980, с.145-146. |
