Изобретение относится к области систем автоматического управления электроприводами переменного тока и может быть использовано для частотного регулирования скорости асинхронного двигателя.
Известна частотно-токовая система для регулирования скорости асинхронного электродвигателя [1], содержащая контур скорости, сигнал ошибки которого пропорциональный активной составляющей тока (моменту нагрузки) поступает совместно с сигналом задания намагничивающей составляющей тока пропорциональной потокосцеплению через преобразователь координат из вращающейся системы отсчета к неподвижной системе координат статора на входы контуров фазных токов асинхронного двигателя.
Преобразование координат осуществляется с помощью двух модуляторов, датчика угла поворота двигателя, дифференциального датчика угла и тахометрической следящей системы.
Недостатком данной системы являются низкие статические и динамические свойства системы регулирования. Это обусловлено упрощенным подходом в реализации контуров управления и отсутствием обратной связи по потокосцеплению. При формировании момента возможно отклонение потокосцепления от заданного в результате изменения активного сопротивления ротора и насыщении машины. Кроме того, не учитывается влияние перекрестных связей и эдс вращения в контурах фазных токов, что приводит к амплитудным и фазовым погрешностям формирования фазных токов. Оптимизация переходных процессов в контурах фазных токов затруднена, так как регуляторы должны иметь переменную частоту пропускания.
Известна система векторного управления скоростью асинхронного электропривода с моделью потока ротора АД (см. рис.11 [3]), содержащая два канала управления преобразователем частоты реализованного на базе выпрямителя сетевого напряжения и автономного инвертора напряжения, один силовой выход которого непосредственно, а два других через датчики тока подключены к обмоткам асинхронного двигателя. Первый из каналов четырехконтурный и содержит последовательно включенные регулятор положения, регулятор скорости с блоком ограничения, регулятор момента, регулятор поперечной составляющей тока статора во вращающейся системе координат. Второй канал двухконтурный и содержит последовательно включенные регулятор потокосцепления и регулятор продольной составляющей тока статора во вращающейся системе координат. Выходы регуляторов тока двух каналов через преобразователь токов из вращающейся системы координат (х, у) в неподвижную систему координат (α, β) и преобразователь двухфазной системы координат (α, β) в трехфазную систему (a, b, с) подключены к входам широтно-импульсного модулятора соединенного выходами с управляющими входами ключей автономного инвертора. Первый вход регулятора положения подключен к задатчику положения, а второй к выходу блока интегрирования, подключенного входом совместно с вторыми входами регулятора скорости и задатчика потокосцепления к выходу датчика скорости асинхронного двигателя.
Выходы датчиков тока подключены через преобразователь трехфазной системы токов (а, b, с) в двухфазную (α, β) к преобразователю токов из системы неподвижных (α, β) координат во вращающуюся систему координат (х, у), один из выходных сигналов которого определяющий продольную Isx составляющую тока статора соединен с вторым входом регулятора тока по составляющей Isx, а через апериодического звено с первыми входами блока деления, с помощью которого формируется сигнал пропорциональный частоте скольжения ωr ротора, и умножения, с помощью которого формируется сигнал пропорциональный динамическому моменту двигателя, другой сигнал пропорциональный поперечной составляющей Isy тока статора соединен с вторыми входами регулятора тока по составляющей Isy, блока деления и умножения. Выход апериодического звена, с помощью которого формируется сигнал Imrx пропорциональный потокосцеплению, подключен в качестве сигнала обратной связи ко второму входу регулятора потокосцепления и к управляющему входу блока ограничения, выход умножителя - ко второму входу регулятора момента, выходной сигнал ωr делителя через сумматор и блок интегрирования соединен с развертывающими входами преобразователей координат, второй вход сумматора подключен к выходу датчика скорости. Синхронная частота определяется как сумма сигнала ωr с выхода делителя и сигнала ω с выхода датчика скорости и подается через блок интегрирования на блоки тригонометрических преобразователей
Недостатком данной системы являются низкие регулировочные свойства, вызванные тем, что поведение модели в системе вращающихся координат не согласуется с реальными процессами, протекающими в двигателе. Это обусловлено тем, что математическая модель определена с рядом допущений, к которым относится: синусоидальность напряжений и токов в двигателе, вывод уравнений модели в предположении постоянства частот статорных и роторных цепей двигателя и отсутствии влияния перекрестных связей в цепях ротора, т.е. для стационарного режима работы и отсутствия переходных режимов. Кроме того, использование датчиков тока в значительном диапазоне выходных частот преобразователя приводит к погрешностям измерения и снижению точности. Введение контура регулирования момента снижает быстродействие системы регулирования, а его эффективность значительно снижается при неточном определении потокосцепления.
Наиболее близкой по технической сущности и по совокупности принципов реализации к заявляемому изобретению является система векторного управления скоростью асинхронного электропривода ротора АД [3], выбранная в качестве прототипа.
Система векторного управления скоростью асинхронного электропривода, содержит контур потокосцепления, включающий в себя последовательно соединенные элемент сравнения соединенные сигнала задания потокосцепления ротора и обратной связи и регулятор потокосцепления, контур скорости, включающий в себя последовательно соединенные элемент сравнения сигнала задания частоты вращения ротора и обратной связи с датчика скорости и двухконтурный параметрический регулятор скорости с блоком ограничения, второй вход которого дополнительно соединен с выходом датчиком скорости, выходы регуляторов потокосцепления и скорости подключены к соответствующим подчиненным контурам тока, каждый из которых содержит последовательно соединенные сумматор сигнала задания тока и обратной связи с соответствующего выхода преобразователя токов из системы (α, β) во вращающуюся систему координат (х, у) и регулятор тока, выходы каждого из которых подключены через блок компенсации эдс вращения и перекрестных связей, преобразователь координат из вращающейся системы (х, у) в неподвижную систему (α, β) и преобразователь двухфазной системы сигналов в трехфазную к управляющим входам преобразователя частоты, соединенного силовыми выходами через датчики тока с обмотками асинхронного электродвигателя, в зазоре которого установлены два датчика составляющих главного потокосцепления на элементах Холла, выходы которых через вычислитель составляющих потокосцепления ротора в неподвижной системе координат (α, β) подключены к входам преобразователя потокосцепления из неподвижной системы координат (α, β) во вращающуюся систему координат (х, у), выходы датчиков тока фаз подключены через преобразователь трехфазной системы токов в двухфазную ко вторым информационным входам вычислителя составляющих потокосцепления ротора в неподвижной системе координат (α, β) и входам преобразователя токов из неподвижной системы координат (α, β) во вращающуюся систему координат (х, у), угол поворота которой относительно неподвижной системы координат (α, β) равен ϕc=∫ωct, вторые развертывающие входы преобразователей координат подключены к выходам направлющих sinϕc и cosϕc двухфазного генератора, вторые и третьи входы блока компенсации эдс вращения и перекрестных связей к выходам преобразователя токов из неподвижной системы координат (α, β) во вращающуюся систему координат (х, у) и выходу датчика скорости, кроме того, система содержит контур автоподстройки частоты потокосцепления, содержащий последовательно соединенные регулятор частоты и блок деления, выход которого задающий синхронную частоту ωс с подключен к входу двухфазного генератора и четвертому входу блока компенсации эдс вращения и перекрестных связей, а управляющий вход совместно с третьим управляющим входом параметрического регулятора скорости, входом обратной связи элемента сравнения контура потокосцепления ротора и пятым входом блока компенсации эдс вращения и перекрестных связей соединен с выходом Ψrx преобразователя потокосцепления из неподвижной системы координат (α, β) во вращающуюся систему координат (х, у) через первый низкочастотный фильтр, причем вход регулятора частоты подключен к выходу Ψry преобразователя потокосцепления ротора из неподвижной системы координат (α, β) во вращающуюся систему координат (х, у) через второй низкочастотный фильтр.
Недостатком данной системы является то, что при ее реализации требуется доработка общепромышленных АД путем установки в зазор двигателя датчиков Холла для контроля составляющих потокосцепления. Это сужает область применения систем с непосредственным измерением вектора потокосцепления.
Сущность изобретения заключается в решении задачи стабилизации системы регулирования без использования датчиков тока и потокосцепления. Это достигается путем введения полной трехфазной модели асинхронного двигателя в естественных координатах статора и ротора, а также дополнительных контуров автоподстройки.
Технический результат заключается в обеспечении качественных показателей систем векторного управления электроприводами переменного тока с минимумом датчиков обратных связей.
Указанный технический результат при осуществлении изобретения достигается тем, что в известной системе векторного управления скоростью асинхронного электропривода, содержащей контур потокосцепления, включающий в себя последовательно соединенные элемент сравнения задания потокосцепления и обратной связи и регулятор потокосцепления, контур скорости, включающий в себя последовательно соединенные элемент сравнения сигнала задания частоты вращения ротора и обратной связи с датчика скорости, параметрический регулятор скорости с блоком ограничения, второй вход которого дополнительно подключен к выходу датчика скорости, выходы регуляторов потокосцепления и скорости подключены к соответствующим подчиненным контурам тока, каждый из которых содержит последовательно соединенные сумматор сигнала задания тока и обратной связи с соответствующего выхода преобразователя токов из трехфазной системы (а, b, с) во вращающуюся систему координат (х, у), регуляторы тока, выходы которых подключены через блок компенсации эдс вращения и перекрестных связей, преобразователь из вращающейся системы координат (х, у) в трехфазную систему (а, b, с) и широтно-импульсный модулятор к блоку управления автономным инвертором, соединенного силовыми входами с источником питания, а выходами с обмотками асинхронного электродвигателя, третий и четвертый входы блока компенсации эдс вращения и перекрестных связей соединены с выходами преобразователя токов из трехфазной системы (а, b, с) во вращающуюся систему координат (х, у), а также последовательно включенные регулятор синхронной частоты, блок деления и интегратор, выход которого соединен с развертывающими входами преобразователя токов, преобразователя координат из вращающейся системы (х, у) в трехфазную систему (а, b, с), особенность заключается в том, что введены модель двигателя в естественных координатах статора и ротора, три вывода которой пропорциональные токам фаз статора подключены к входам преобразователя токов из системы (а, b, с) во вращающуюся систему координат (х, у), преобразователь потокосцепления ротора в систему вращающихся координат (х, у), три входа которого подключены к трем другим выходам модели пропорциональным потокосцеплению обмоток ротора, выход Ψrx - к входу обратной связи элемента сравнения контура потокосцепления, выход Ψry - к входу регулятору синхронной частоты, третий сумматор, два входа которого соединены с выходом интегратора и седьмым выходом, соответствующим координате угла поворота ротора модели, а выход подключен к развертывающему входу преобразователя потокосцепления ротора в систему вращающихся координат (х, у), восьмой выход модели, соответствующий координате частоты вращения, подключен совместно с выходом датчика скорости к третьему элементу сравнения, выход которого через регулятор компенсации момента нагрузки соединен с входом координаты статического момента модели.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения. Определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности существенных признаков аналога, позволило выявить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном устройстве, изложенных в формуле изобретения.
Следовательно заявленное изобретение соответствует условию "Новизна".
Для проверки соответствия заявленного изобретения условию "Изобретательский уровень" заявитель провел дополнительный поиск известных решений, чтобы выявить признаки, совпадающие с отличительными от прототипа признаками заявленного устройства. Результаты поиска показали, что заявленное изобретение не вытекает явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного изобретения преобразований на достижения технического результата, в частности, заявленным изобретением не предусматривается следующее:
1) использования модели ротора двигателя в системе координат вращающихся с синхронной частотой;
2) использование трехфазных преобразователей координат и широтно-импульсного модулятора не внесено в отличающуюся часть формулы изобретения, так, как принцип их реализации известен;
3) использование решающего блока для формирования составляющих потокосцепления ротора.
Описываемое изобретение не основано на изменении количественных признаков, введение известных блоков и представление таких признаков во взаимосвязи вытекает из основной идеи изобретения - использовании автономных свойств модели для реализации возможности настройки привода без введения датчиков обратных связей и подключения двигателя. В аналогах заявляемого изобретения указанные блоки используются по другому функциональному назначению и имеют другие функциональные связи.
Следовательно, заявленное изобретение соответствует условию "Изобретательский уровень".
Сущность изобретения поясняется графическими материалами на которых изображено: на фиг.1 - функциональная схема системы векторного управления скоростью асинхронного электродвигателя, на фиг.2 - структурная схема трехфазной модели двигателя в естественных координатах статора и ротора. Заявляемая согласно формуле изобретения "Система векторного управления скоростью асинхронного электропривода" содержит контур потокосцепления, включающий в себя последовательно соединенные элемент 1 сравнения сигнала задания потокосцепления ротора и обратной связи по составляющей Ψrx потокосцепления, регулятор 2 потокосцепления, контур скорости, который содержит последовательно включенные элемент 3 сравнения сигнала задания частоты вращения ротора и обратной связи с выхода датчика скорости, параметрический регулятор 4 скорости с блоком ограничения. Выходы регулятора 2 потокосцепления и регулятора 4 контура скорости подключены соответственно через сумматоры 5, 6 подчиненных контуров тока, регуляторы тока 7, 8, два канала блока 9 компенсации эдс вращения и перекрестных связей, преобразователя 10 из вращающейся системы координат (х, у) в трехфазную систему (а, b, с) к широтно-импульсному модулятору 11 блока управления автономным инвертором 12, силовые входы которого подключены к источнику постоянного напряжения, а выходы - к обмоткам асинхронного двигателя 13, а также к модели двигателя 14 в естественных системах координат статора и ротора. Три выхода модели, пропорциональные токам фаз статор, через преобразователь 15 токов из трехфазной системы (a, b, с) во вращающуюся систему координат (х, у), подключены к соответствующим вторым входам сумматоров 5, 6 контуров тока в качестве сигналов обратной связи и к первым двум входам блока 9 компенсации. Три других выхода модели, пропорциональные потокосцеплению фаз ротора, подключены к преобразователю 16 потокосцепления ротора во вращающуюся систему координат (х, у), один из выходов которого, характеризующий составляющую Ψrx потокосцепление ротора, соединен с входом обратной связи элемента 2 сравнения контура потокосцепления, с 3-м входом блока 9 компенсации эдс и перекрестных связей и управляющим входом регулятора скорости 4 второй выход Ψry преобразователя 16 через регулятор 17 синхронной частоты, блок 18 деления и блок 19 интегрирования фазы подключен к входам тригонометрических преобразователей модели двигателя 14 и преобразователей координат 10, 15. Выход интегратора 19 и выход модели характеризующий координату угла поворота ротора подключены к третьему сумматору 20, выход которого равный разности фаз подключен к развертывающему входу преобразователя 16. Выход модели, соответствующий координате ω частоты вращения ротора, через третий элемент сравнения 21 и регулятор 22 компенсации момента нагрузки подключен к ее входу, соответствующему координате статического момента. Входы обратных связей элементов 3, 4, 21 соединены с выходом датчика 23 скорости двигателя. Управляющие входы регулятора 4 и блока деления 18 подключены к выходу Ψrx преобразователя потокосцепления ротора 17.
Принцип организации системы регулирования основан на организации условий функционирования, при которых формирование момента и потокосцепления осуществлялось независимо друг от друга. Данные условия выполняются при контроле составляющих Ψrx и Ψry вектора потокосцепления ротора в системе координат вращающихся с синхронной скоростью и работе с составляющими потокосцепления ротора Ψrx=const и Ψry=0. Структурная схема асинхронного двигателя, в этом случае подобна структурной схеме двигателя постоянного тока и содержит два основных контура: стабилизации потокосцепления ротора и регулирования скорости. Регулирование момента при этом осуществляется только за счет одной величины Isy поперечной составляющей тока статора.
Система управления (см. фиг.1) реализована в соответствии с принципами построения систем подчиненного регулирования параметров. Канал регулирования потокосцепления ротора Ψrx содержит подчиненный контур составляющей тока Isx, а контур составляющей тока Isy подчинен контуру скорости. Параметры регуляторов 2, 4, 7 и 8 выбираются исходя из условия настройки контуров на модульный оптимум. Регулятор скорости двухконтурный. Первый контур содержит интегратор с управляемым входом по рассогласованию второго. Второй контур включает в себя дополнительный элемент сравнения, пропорциональное звено, делитель и блок ограничения. Передаточные функции регуляторов при этом соответствуют ПИ-регуляторам. Для развязки контуров управления и устранения влияния перекрестных связей между составляющими потокосцепления статора на выходе регуляторов тока с помощью блока 9 формируются компенсирующие сигналы ωcL'sIsy, ωcL'sIsx, где ωc - синхронная частота,  - переходная индуктивность статорной обмотки, Ls, Lr, Lm - индуктивности статорной и роторной цепи и их взаимная индуктивность. Для компенсации влияния внутренних перекрестных связей на статор со стороны ротора формируются корректирующие сигналы ωKrΨrx, КrΨrx/Тr, которые вводятся на выходе регуляторов тока. Здесь Kr=Lm/Lr - коэффициент связи ротора, Тr - постоянная времени ротора, ω - частота вращения ротора. Учитывая, что переходная индуктивность L′S, составляющие потокосцепление ωСL′Isy, ωСL′Isx не оказывают значительного влияния на переходные процессы. Влиянием связи ωKrΨry с учетом реализации условия Ψry=0 можно пренебречь. Действие составляющей ωKrψrx в силу значительной инертности ротора также не оказывает существееного влияния на переходные процессы системы с обратными связями.
- переходная индуктивность статорной обмотки, Ls, Lr, Lm - индуктивности статорной и роторной цепи и их взаимная индуктивность. Для компенсации влияния внутренних перекрестных связей на статор со стороны ротора формируются корректирующие сигналы ωKrΨrx, КrΨrx/Тr, которые вводятся на выходе регуляторов тока. Здесь Kr=Lm/Lr - коэффициент связи ротора, Тr - постоянная времени ротора, ω - частота вращения ротора. Учитывая, что переходная индуктивность L′S, составляющие потокосцепление ωСL′Isy, ωСL′Isx не оказывают значительного влияния на переходные процессы. Влиянием связи ωKrΨry с учетом реализации условия Ψry=0 можно пренебречь. Действие составляющей ωKrψrx в силу значительной инертности ротора также не оказывает существееного влияния на переходные процессы системы с обратными связями.
Для контроля составляющих тока статора и потокосцепления ротора используется модель двигателя.
Исходная система матричных уравнений для напряжений статора и ротора трехфазного АД, записанных в естественных системах координат, имеет вид:
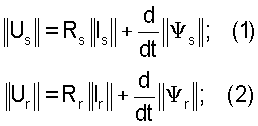
где
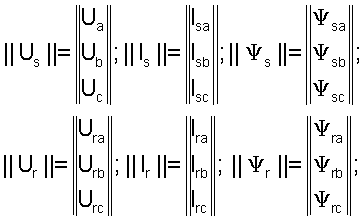
Rs, Rr - сопротивления обмоток статора и ротора; Isa, Isb, Isc - токи фаз статора; Ira, Irb, Irc - токи фаз ротора; Ψsa, Ψsb, Ψsc, Ψra, Ψrb, Ψrc - соответственно потокосцепления фаз статора и ротора.
Максимальная взаимная индуктивность обмоток статора и ротора
 .
.
При повороте ротора на угол ϕ относительно статора выражения для потокосцепления имеют вид:
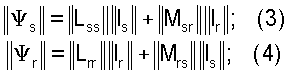
где для симметричной трехфазной машины
Здесь Ls, Lr - соответственно индуктивность статорной и роторной обмотки.
Момент двигателя для естественных координат двигателя определяется как частная производная по углу от электромагнитной энергии запасенной в обмотках статора и ротора
 ,
,
что дает следующее выражение

где ϕ - угол поворота ротора относительно статора.
Уравнение движения привода
где J - момент инерции привода, Мc - момент нагрузки на валу двигателя.
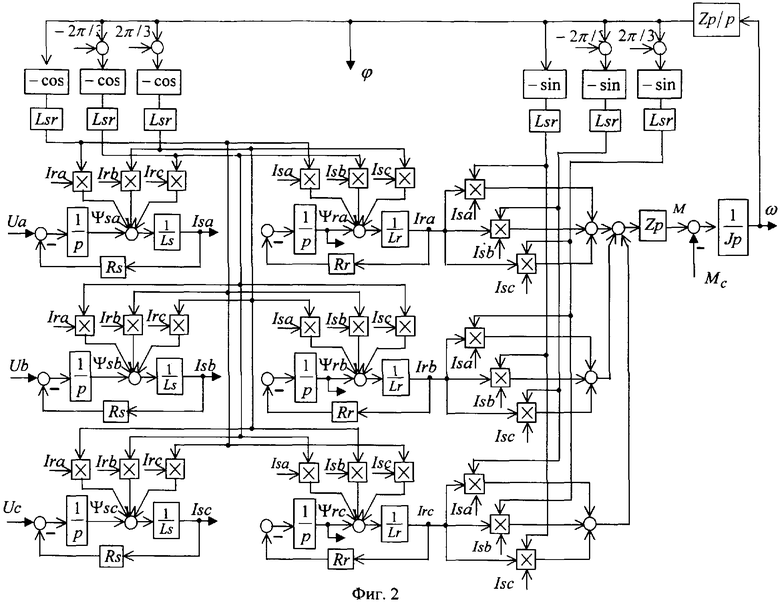
Структурная схема модели двигателя 14 в соответствии с уравнениями (1)÷(6) представлена на фиг.2. В качестве основных входных координат модели используются напряжения на обмотках статора. Это позволяет наиболее просто производить сопряжение модели с реальными величинами, воздействующими на объект управления, например, с помощью делителей напряжения, соединенных в звезду.
Зависимость между фазными величинами и составляющими вектора тока статора в направлениях осей х и у определяется из уравнения

где 
Данное уравнение определяет соответствие между мгновенными значениями фазных величин и составляющими обобщенного вектора.
Переход от фазных величин модели в системе неподвижных координат к ортогональным составляющим тока статора в системе вращающихся координат осуществляется преобразователем 15 в соответствии со следующими выражениями:

Сигналы управления широтно-импульсным модулятором 19 автономного инвертора формируются преобразователем 10 путем перехода от ортогональных составляющих обобщенного вектора к системе трехфазных напряжений в соответствии со следующими уравнениями:
Usa=Usxcosϕc-Usysinϕс;
Usb=Usxcos(ϕc-2π/3)-Usysin(ϕ-2π/3);
Usc=Usxcos(ϕc+2π/3)-Usysin(ϕ+2π/3).
Уравнения перехода от фазных величин потокосцепления ротора к составляющим потокосцепления в системе вращающейся координат, которые реализуются с помощью преобразователя 16, имеют вид:
 ;
;
 .
.
Слежение за синхронной частотой ωc осуществляется путем контроля составляющей потокосцепления Ψry с помощью регулятора 17 синхронной частоты и блока деления 18. Для формирования фазы развертки ϕc=∫ωcdt используется интегратор 19. Рассогласование по фазе (ϕс-ϕ) между статором и ротором определяется с помощью сумматора 20.
Для исключения рассогласования между моделью и двигателем при изменении момента нагрузки на валу двигателя, используется контур компенсации момента нагрузки. Рассогласование по скорости модели и двигателя (ω и ω∂) формируется сумматором 21 и через регулятор 22 подается на вход модели соответствующий координате статического момента Mc. С учетом того, что коэффициент передачи интегратора модели, тождественно равный моменту инерции двигателя, фиксированная величина - оптимизация процессов в контуре достигается регулятором 22, передаточная функция которого соответствует реальному дифференцирующему звену. Данный контур также компенсирует другие возможные отклонения скорости, вызванные не идентичностью параметров двигателя и модели, а также их изменением в процессе работы.
Первичная настройка системы регулирования возможна без использования датчика скорости двигателя. Для этого достаточно замкнуть контур скорости по выходной координате ω модели.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленной системы следующей совокупности условий:
- существенные признаки, характеризующие сущность изобретения, в принципе, могут быть многократно использованы в технике автоматического управления частотно регулируемыми электроприводами в различных областях промышленности с получением технического результата, заключающегося в регламентации переходных режимов и обеспечении условий устойчивости без использования датчиков тока и потокосцепления;
- для реализации принципа построения системы могут быть использованы как аналоговые, так и аналого-цифровые средства управления, преимущество при этом имеют сигнальные микропроцессоры и микроконтроллеры;
- средства, воплощающее заявленное изобретение при его осуществлении, независимо от их вида способны обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует условию "Промышленная применимость".
Источники информации
1. Бродовский В.Н., Иванов B.C. Приводы с частотно-токовым управлением. М.: Энергия, 1974, с.37-47, с.134-138, рис.3-2.
2. Кочетков В.Д. и др. Системы регулирования электроприводов переменного тока с микропроцессорным управлением / В.Д.Кочетков, Л.X.Дацковский, А.В.Бирюков, Ю.М.Гусяцкий, В.Г.Роговой // Электротехн. пром-сть. Сер. 08. Электропривод: Обзор, информ. - 1989. Вып.26. - С.1-80.
3. Патент РФ на изобретение №2158055, кл. Н02Р 21/00, 2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2008 |
|
RU2395157C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2023 |
|
RU2819147C1 |
| УСТРОЙСТВО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2766907C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
Изобретение относится к области систем автоматического управления электроприводами переменного тока и может быть использовано для частотного регулирования скорости асинхронного двигателя. Технический результат заключается в обеспечении качественных показателей систем векторного управления электроприводами переменного тока с минимумом датчиков обратных связей. Для этого в устройство введены трехфазная модель двигателя в естественных координатах статора и ротора и контура компенсации момента нагрузки. Система содержит контур потокосцепления и контур скорости с подчиненными контурами продольной и поперечной составляющих тока статора. Информационная часть системы включает в себя преобразователь потокосцепления ротора в систему вращающихся координат (х, у) и преобразователь токов из трехфазной системы (а, b, с) во вращающуюся систему координат (х, у), соединенных с выходами модели. Для принудительной ориентацией потока машины используется контур автоподстройки частоты потокосцепления. 2 ил.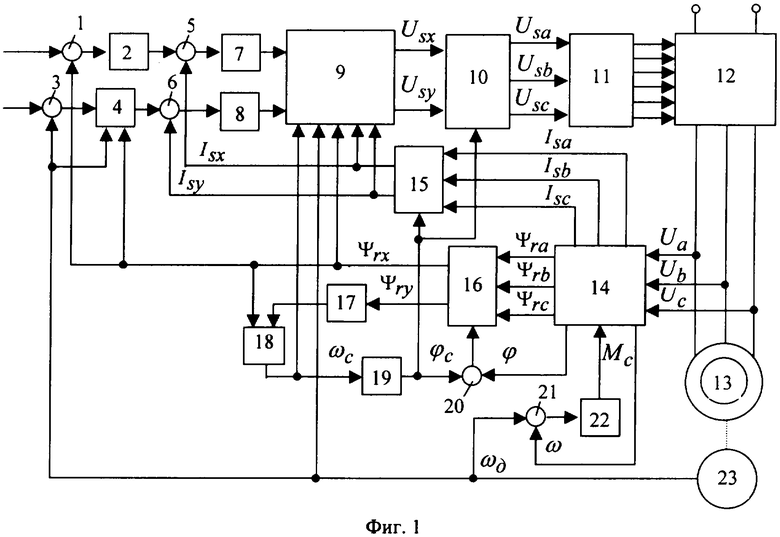
Система векторного управления скоростью асинхронного электропривода, содержащая контур потокосцепления, включающий в себя последовательно соединенные элемент сравнения задания потокосцепления и обратной связи и регулятор потокосцепления, контур скорости, включающий в себя последовательно соединенные элемент сравнения сигнала задания частоты вращения ротора и обратной связи с датчика скорости, параметрический регулятор скорости с блоком ограничения, выходы регуляторов потокосцепления и скорости подключены через соответствующие подчиненные контуры тока, каждый из которых содержит последовательно соединенные сумматор сигнала задания тока и обратной связи с соответствующего выхода преобразователя токов из трехфазной системы (а, b, с) во вращающуюся систему координат (х, у), регуляторы тока, два канала блока компенсации ЭДС вращения и перекрестных связей, преобразователь координат из вращающейся системы (х, у) в трехфазную систему (а, b, с) и широтно-импульсный модулятор к блоку управления автономным инвертором, соединенного силовыми входами с источником питания, а выходами - с обмотками асинхронного электродвигателя, первый и второй входы блока компенсации ЭДС вращения и перекрестных связей соединены с выходами преобразователя токов из трехфазной системы (а, b, с) во вращающуюся систему координат (х, у), а также последовательно включенные регулятор синхронной частоты, блок деления и интегратор, выход которого соединен с развертывающими входами преобразователя токов из трехфазной системы (а, b, с) во вращающуюся систему координат (х, у), преобразователя координат из вращающейся системы (х, у) в трехфазную систему (а, b, с), вход обратной связи параметрического регулятора скорости соединен с выходом датчика скорости, отличающаяся тем, что введены трехфазная модель двигателя в естественных координатах статора и ротора, три входа которой соединены с силовыми выходами автономного инвертора, а три первых выхода, пропорциональные токам фаз статора, подключены к входам преобразователя токов из трехфазной системы (а, b, с) во вращающуюся систему координат (х, у), преобразователь потокосцепления ротора в систему вращающихся координат (х, у), три входа которого подключены к трем другим выходам модели, пропорциональным потокосцеплениям обмоток ротора, выход ψrx - к входу обратной связи элемента сравнения контура потокосцепления, третьему входу блока компенсации ЭДС вращения и перекрестных связей и управляющим входам параметрического регулятора скорости и блока деления, выход ψry - к входу регулятора синхронной частоты, третий сумматор, два входа которого соединены с выходом интегратора и седьмым выходом модели, соответствующим координате угла поворота ротора, а выход подключен к развертывающему входу преобразователя потокосцепления ротора в систему вращающихся координат (х, у), третий элемент сравнения, два входа которого соединены соответственно с восьмым выходом модели, соответствующим координате частоты вращения, и выходом датчика скорости, а выход через регулятор компенсации момента нагрузки соединен с входом координаты статического момента модели.
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| RU 2132110 C1, 20.06.1999 | |||
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Электропривод переменного тока | 1987 |
|
SU1432711A1 |
| Прибор для непрерывного измерения толщины масляной пленки в подшипнике скольжения | 1950 |
|
SU91589A1 |

