те
|СЛ






| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления располагаемой реактивной мощности явнополюсных синхронных машин | 1987 |
|
SU1534477A1 |
| Устройство для вычисления располагаемой реактивной мощности явнополюсных синхронных машин | 1985 |
|
SU1458880A1 |
| Способ моделирования располагаемой реактивной мощности турбогенератора | 1985 |
|
SU1381648A1 |
| Способ моделирования располагаемой реактивной мощности турбогенератора | 1985 |
|
SU1381649A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1989 |
|
SU1646035A2 |
| Электропривод | 1991 |
|
SU1837379A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
Изобретение относится к аналоговой вычислительной технике. Цель изобретения - повышение точности. Устройство содержит блок 1 задания текущего напряжения статора, блок 2 задания текущего тока статора, преобразователь 3 тока в напряжение, блок 4 сдвига фазы, первый и второй усили
со
00
сл
4 4
138
тели 5 и 6, блок / формирования ортогональных составляющих, первьй фазовый модулятор 8, второй фазовый модулятор 9, сумматоры 10, 11, 12, 13, 14, 15 и 16, управляемые усилители 17, 18, 19, умножитель 20, блок 21 нелинейности типа экспоненты, блок 22 сравнения фаз, блоки 23,24,25,26 сравнения, блок 27 сравнения фаз, элементы 28,29,30,31 выборки и хранения сигнала, фазочувствительные выпрямители 32,33, выпрямители 34,35,36,
Изобретение относится к аналоговой вычислительной технике, а именно к технике управления режимами работы энергосистем, и может быть использо- вано для непрерывного контроля располагаемой реактивной мощности сиьгерон- ных генераторов и двигателей.
Цель изобретения - повышение точ- устройства.
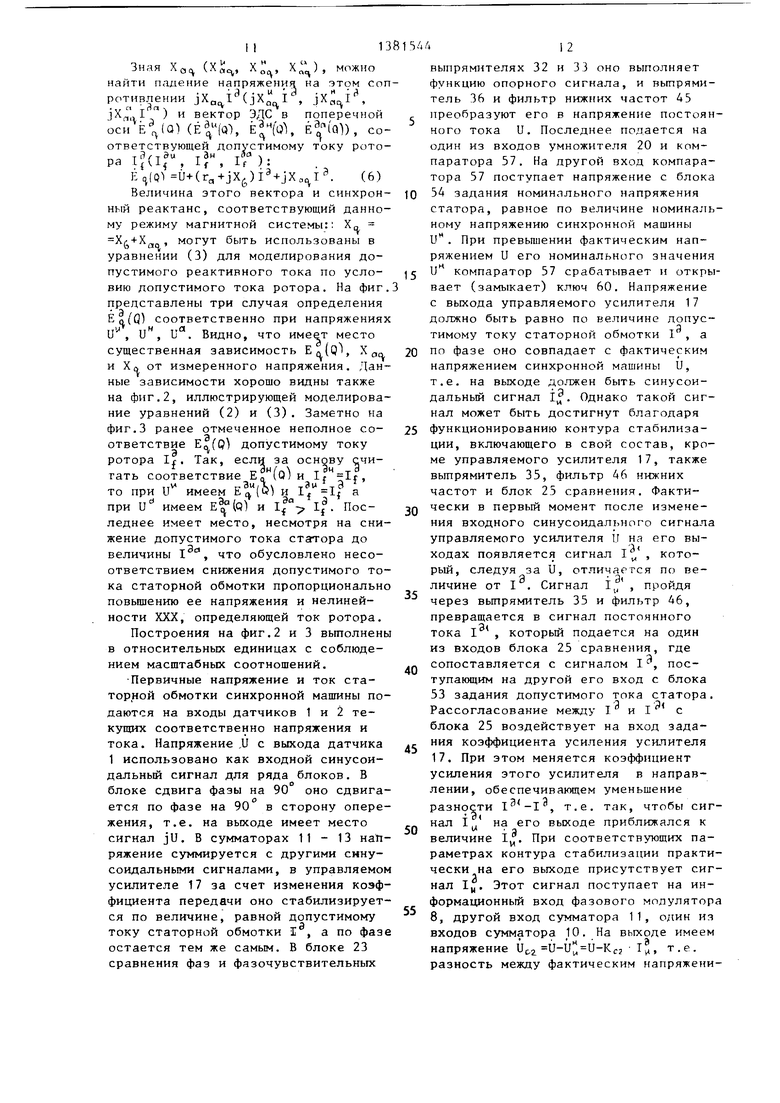
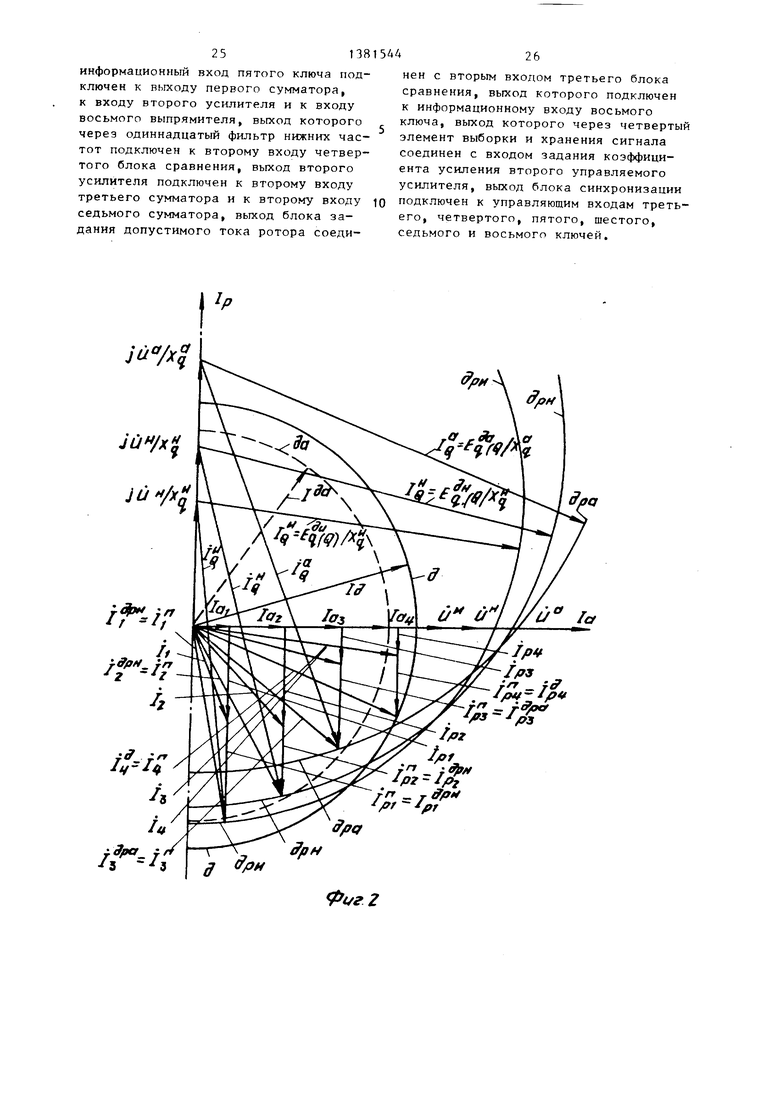
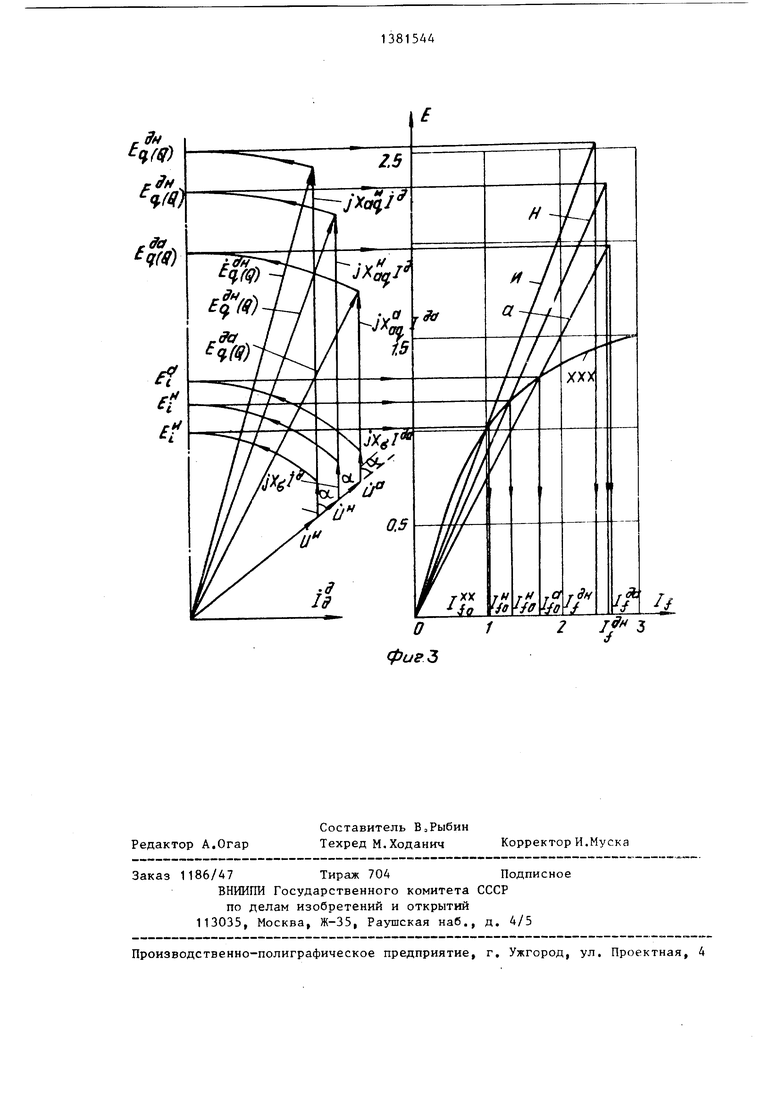
На фиг.1 предстанлена блок-схема /стройства; на фиг. 2 - векторно-кру- говые диаграммы; на фиг.З - векторные диаграммы формирования внутрен.шй ЭДС, ЭДС в гюпере |ной оси, характе- ристика холостого хода (XX) и использование их для определения тока ротора.
Устройство содержит датчик 1 текущего напряжения статора, датчик 2 текущего тока статора, преобразователь 3 тока в напряжение, блок 4 сдвига фазы на f} , первый 5 и второй 6 усилители, фазовраш.атель 7, первый В и второй 9 фазовые модуляторы, сумматоры 10 - 16, управляемые усилители 17 - 19, умножитель 20, блок 21 нелинейности типа экспоненты, блока 22 и 23 сравнения фаз, блоки 24 - 27 сравнения, элементы 28 - 31 выборки и хранения сигнала, фазочувстеитель- ные выпрямители 32 и 33, выпрямители 34 - 41, фильтры 42 - 52 нижних частот, блок 53 задания допустимого то- ка статора, блок 54 задания номиналг - ного напряжения статора, блок 55 задания тока холостого хода ротора.
544
37,38,39,40,41, фильтры 42,43,44,45, 46,47,48,49,50,51,52 нижних частот, блок 53 задания допустимого тока статора, блок 54 задания номинального напряжения статора, блок 55 задания допустимого тока ротора, компараторы 56,5Л блок 58 синхронизации и ключи 59,60,61,62,63,64,65,66, Устройство позволяет повысить точность за счет решения поставленной за.,ачи более простыми техническими средствами в сравнении с известным, 3 ил.
компараторы 56 и 57, блок 58 синхронизации и ключи 59 - 66.
Устройство работает следующим образом.
Благодаря введению операции разложения допустимого синусоидальнбго тока статорной обмотки на фактическ т активную и моделируемую реактивную составляющие предельно упрощено формирование располагаемой реактивной мощности по условию тока статора, так как для этой цели используется непосредственно моделируемая реактивная составляющая допустимого тока статора.
Формирование синусоидального тока статорной обмотки с номинальной фазой и модулем, равным допустимой величине при фазном напряжении, не пре- выщающем номинальное, и сниженным на величину, пропорциональную превышению фазным напряжением номинального значения, и использование данного тока для получения внутренней ЭДС позволяют упростить операцию по определению тока намагничивания синхронной машины, так как при этом не требуется учитывать распределение фактической активной и моделируемой реактивной составляющих тока и мощности.
Использование отношения тока намагничивания, соответствующего внутренней ЭДС, к току намагничивания при холостом ходе и номинальном фазном напряжении для определения синхронного реактанса с учетом нелинейности магнитной системы машины позиоляет исключить применение характеристики короткого замыкания для определения тока ротора и, как следствие, повысить точность моделирования располагаемой реактивной мощности по условию допустимого тока ротора, так как при этом ycтpaняeтdя ошибка, обусловленная } есоотБетствием характеристики к.з. рабочим режимам маши- ны, при которых определяется данная мощность.
Определение ЭДС в поперечной оси с использованием синусоидального тока статора (который имеет номинальную фазу и модуль, равный допустимому току статорной обмотки, если фазное напряжение не превышает номинальное, и сниженный на величину, пропорциональную превьш ению фазным напряжением номинального значения) и синхронного реактанса (в котором учтена нелинейность магнитной системы) дает возможность исключить процедуру итеративного формирования располагаемой реактивной мощности по условию допустимого тока ротора, так как при этом имеет место несложная зависимость искомого располагаемого реактивного тока от ЭДС в поперечной оси, фазного напряжения, синхронного реактанса и фактического активного тока.
Использование синхронного реактанса в поперечной оси при определении ЭДС в поперечной оси позволяет расширить функциональные возможности предлагаемого способа, а именно дает возможность с помощью одних и тех же операций формировать располагаемые реактивные ток и мощность как неявно- полюсной, так и явнополюсной машины. Данная возможность обусловлена тем, что ЭДС за реактансом в поперечной оси у явнополюсных машин небольших и среднюю мощностей (до 150 МВт) аналогично неявнополюсным агрегатам не претерпевает заметных изменений при перераспределениях активной и реактивной составляющих допустимого тока статора. Поэтому моделирование уравнений мощностей исходя из допустимого тока ротора как у неявнополюсных, так и у явнополюсных машин возможно с помощью одного и того же уравнения Э, и Е;(Ч)-и
N2+(Q Ч У-)2(2 )2 (1)
Лл л
где N - фактическая активная;
0
5
0
5
0
5
0
5
0
5
Xj.a
- допустимая no условию тока
ротора реактивная мощность; и - напряжение статорной обмотки, причем в уравнении вместо реактанса в продольной оси Xj использован реактанс в поперечной оси Х, а Е(б1 означает ЭДС в поперечной оси, но не за реактансом в продольной оси за реактансом в поперечной оси Хд, При этом в случае неявнополюсных машин, у которых , ЭДС в поперечной оси за продольным реактансом Х и за реактансом в поперечной оси Х(, равны друг другу,.поэтому для них в уравнении (1) можно считать E(Q) Ег. В случае явнополюсных машин Х,,Х, поэтому для них и, следовательно, в уравнении (1) необходимо принять Е (. В дальнейшем целесообразно использовать названия ЭДС в поперечной оси для Е и промежуточной ЭДС в поперечной оси для Е. Введение в устройство дополнительно второго блока сравнения фаз, двух усилителей, фазовращателя, второго фазового модулятора, семи сумматоров, трех управляемых усилителей, множч- теля, блока задания нелинейности типа экспоненты, четырех блоков сравнения, четырех элементов выборки и хранения сигнала, восьми выпрямителей, девяти фильтров нижних частот, блоков задания допустимого тока и номинального напряжения статора, тока холостого хода ротора, двух компараторов, устройства синхронизации и восьми ключей позволяет непрерывно в темпе процесса производить моделирование располагаемой реактивной мощности как неявнополюсных, так и явнополюсных синхронных машин небольших и средних мощностей.
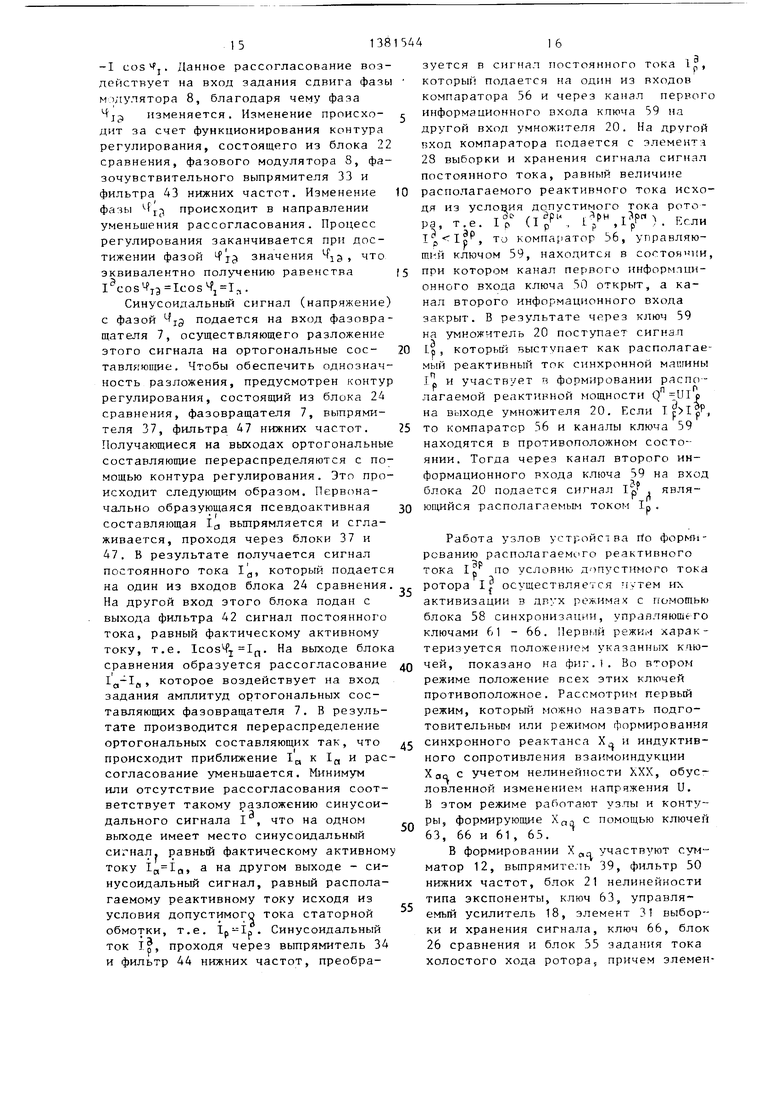
На фиг.2 показаны диаграммы век- торно-синусоидальных величин соответственно для режимов допустимого тока статора I и допустимого тока ротора I Р при номинальном напряжении статорной обмотки (н), при напряжении ниже номинального (и) и вьш1е номинального (о), которые иллюстрируют формирование годографов в комплексной плоскости активного I и реактивного IP токов, обусловленных выполнением уравнений мощностей машины по условиям допустимых токов статора и ротора (1), если все их члены поделить на квадрат величины фазного напряжения и :
Годограф по условию допустимого тока статорной обмотки (2) не зависит от напряжения (линия 9 ), Однако в случае превышения номинального напряжения должно быть учтено эксплуатационное правило о снижении допустимого тока статора пропорционально данному превышению (пунктирная линия
Эа). Это вызвано необходимостью снижения тока ротора, который при повышенном напряжении статорной обмотки и неснижении допустимого тока статора превышает допустимую величину тока для ротора. Действительно, неучет снижения допустимого тока статора в этом случае приводит к завышенному значению Е.(Q), что эквивалентно превышению допустимого тока ротора при моделировании располагаемого реактивного тока по (3). Таким образом, снижение допустимого тока статора при повышенном напряжении является условным, так как фактически при этом до- пустимьй ток статора остается прежним I , Именно этот ток и соответст- вутощая ему сплошная линия Э годографа должны быть использованы при определении располагаемого реактивного тока по условию допустимого тока статора. Для нахождения ЭДС в поперечной оси Е(а ) при и необходимо сниженное значение допустимого тока статора I ° , что условно отображено пунктирной линией Эа. Следует заметить, что
А Н
при и /, и нахождение ЭДС в поперечной оси Е О) по I приводит к зани
женному ее значению, что эквивалентно току ротора ниже допустимой величины при моделировании располагаемого реактивного тока по (3). Чтобы обеспечить соответствие Е (Q) и допустимо тока ротора 1 при это, необходимо увеличение допустимого, тока статора до величины I . Однако это необязательно, так как использование 1 вместо I не приводит к опасности превьш1ения допустимого тока ротора, а наоборот, ведет к снижению этого тока до величины I / , меньшей допустимой ,, в то время как определяющим для располагаемых реактивных
величин при этом является ток статора. Также уменьшение I по сравнению с If при сниженном напряжении вслед5446
ствие существенно большей крутизны XXX при этом заметно меньше, чем увеличение I г относительно 1 при повышенном напряжении, с ростом которого нелинейность XXX возрастает. Это свидетельствует о неполном соответствии ЭДС ) при разных напряжениях и, и , и допустимому току
д ротора 1г, т.е. как бы имеют место разные допустимые токи ротора, а
именно Е(0
ЗТ,
сопт1зетствует I
Эй
t . - - Q. .i 1134; . j)yt- 1- -ГJ
), (QVl;. При этом, не т тЗ,.п
5
смотря на снижение I при U чина Т г° полностью не совпадает с
велиt
Г
Это связано с нелинейностью изменения XXX в диапазоне от U до u, поэтому пропорциональное, т.е. линейное, снижение допустимого тока
Q статора при и полностью не компенсирует нелинейное увеличение допустимого тока ротора.
Таким образом, годографы по условию допустимого тока роторной обмотки
5 (3) зависят от напряжения U, U, U°. Они обозначены, соответственно 3pw , 3pw , Эра .
Все годографы представляют собой полу-ткрхткности с радиусами, равными
п квадратному корню из правых частей (2) и (3) и обозначенными 1, , 1а;Е-:(о1/х;, i; E iQb x;, /Х. Центр окрул ностей Э и За определен точками Ij-0, , а полуокружностей Зри J Зрн , dpa соответственно точками при и In-jV /X n, , jU /Х, фактически активные 1д, реактивные 1р и полные I токи заданы для 4 случаев, обозначенньсх соответственно цифрами 1, 2, 3, 4 в нижнем индексе. Аналогично обозначены располагаемые реактивные токи 1р и полные токи 1, причем если они обусловлены допустимым током статору
0
то
, они приравнены соответственно In, Г , если допустимым током ротора, то соответственно iJP, тЭрРи Эра japu jdpH j Эрп j, дополнительным цифровым индексом внизу,, указывающим номер случая заданньгх токов.
На фиг.З даны векторные диаграммы )рмирования внутренней ЭДС Е.; и ЭДС в поперечной оси EQ (промежуточной ЭДС в поперечной оси Е g а случае яв- нополюсных машин), характеристика
0
5
холостого хода XXX, использование ее для определения тока намагничивания l.{if по внутренней ЭДС Е. и построения нагрузочных характеристик
7138
(прямые и ,и ,а ), применение последних для нахождения допустимого тока ротора If по Э1С Е (Ql. Диаграммы и характеристики даны для трёх случаев, когда фазное напряжение статорпой обмотки номинальное (и), меньше номинального (и) и больше номинального (а).
При построении диаграмм и нагрузочной характеристики для последнего случая учтено эксплуатационное требование о пропорциональном снижении тока статора при превышении фазным напряжением номинального значения. Допустимый ток статорной обмотки для этого случая обозначен I , а для
случаев непревышения номинального напряжения - 1. В соответствии с разным наклоном нагрузочных характеристик и , н ,о обозначены разные значения реактанса взаимоиндукции
У и у
Н
Работа устройства основана на воспроизведении уравнений (2) и (3), представляющих собой полуокружности соответственно с центром в начале координат и со смещением по оси 1р на величину U/XQ, а также радиусами I и (O) Наиболее просто данные кривые воспроизводятся с Ломощью векторных преобразований синусоидальных величин. С этой целью измеряют фактическое напряжение статорной обмотки и (например, U , U, и) и фактический активный ток (например, I
ж
-а-5
1д), формируют синусоидальный
сигнал, равньй по величине допустимому току статорной обмотки I и регулируемый по фазе исходя из требований годографа Э , и другой синусоидальный сигнал с фазой номинального тока, а
3Н Дл
ПО величине равный 1 при U«U и I при и и, получают синусоидальный сигнал JU/X(JUVX, juVxJ, ), т.е. равный по величине отношению напряжения к синхронному реактансу в поперечной оси и сдвинутый относительно напряжения на 90 , воспроизводят синусоидальный сигнал 1,.,(1д,1ц, In) исходя из допустимого тока ротора ifd, ), причем сигнал 1 по величине равен отношению ЭДС в поперечной оси Е3(о) (Е, Е , Е) к синусоидальному реактансу в этой оси Х((Х ,х Х), а по фазе регулируется исходя из условий годографов 5ри, Эрк, 9pd (фиг.2), суммируют сигналы
15
5
0
5
0
5
0
5
0
5
и/Х„ и I,. Изменяя фазы сянугоидальV тЭ
ных сигналов Т | Q (I , Т , Т Q) , получают годографы векторов Т и jl /Xa+
i,(juVx%T , juVx;, juVx,+ip
в виде полуокружностей и соответственно 3 и Эр ( Эрм (1рм ,3ря). Нижняя часть этих годографов, лежащая в четвертом квадрате, позволяет пoлvчить располагаемую величину реактивного тока при фактической активно-индуктивной загрузке машины, что представляет практический интерес для управления режимами. На фиг.2 предстаилены четыре различные загрузки такого типа - пары фактически активных и реактивных токов (1а,1р(), (IQ, ,1рз), (1а,1р), (Ici4flp4 полных токов статора (1 ,1,,1,,1). Наличие голографов по условиям допустимого тока статора и допустимого тока ротора (Эри,Эрн, Зрд) при разных измеренных фазных напряжениях (U,li,U ), а также измеренной величины активного тока
(I о, aj 1а4 ПОЗВОЛЯЮТ СОГЛаСНО
фиг.2 получить в каждом конкретном случае (в зависимости от величин напряжения и активного тока) допустимые величины реактивного тока по обоим условиям IP и .). Минимальная из них является располагаемой величиной Г р. Допустимым и располагаемым реактивным токам соответствуют допустимые I ,(1 Р, -j-dpH j Р) и располагаемые I полные токи статора. На фиг. 2 показаны че1Ъ1- ре конкретных случая формирования располагаемых реактивного и полного токов, причем, чтобы обосновать выбор конкретного годографа при каждом конкретном активном токе и напряжении, располагаемые токи приравнены соответствующим допустимым токам, в верхних индексах которых содержится информация о величине напряжения и определяющем допустимом токе статора или ротора. Например, запись I р, 1 jf, , 1, означает, что располагаемые реактивный и полный токи при измеренных активном токе 1 и напряжении и , которое меньше номинального, определены допустимым током
-ч-.П
ротора If . Аналогично записи I р, уЭрн -.1 -гЭра jn.epci
Pi 1 г f3 ъ i
означают, что располагаемые токи
при активных токах соответственно
Olj
и
1ц, в напряжениях U
и
определены допустимыми токами ротора Ij и l|, а последняя запись 1р4
Ip4 указывается на то, что располагаемые токи при фактическом активном токе 1,, определены допус-
тимьгм током статора, I.
Операция формирования допустимых реактивных токов по условию допустимого тока ротора заключается в обеспечении угла между векторами напряжения и и суммой векторов jU/X +1п-1у равным 90 за счет регулирования фазы вектора Ig, Формирование допустимых реактивных токов по условию допустимого тока статора обеспечиваетс путем разложения вектора последнего на ортогональные составляющие так, чтобы активная составляющая была равна величине измеренного активного тока. Операция получения располагаемого реактивного тока заключается в сравнении двух величин реактивного тока, определенных соответственно по условиям допустимых токов статора и ротора, и выборе меньшей из сравниваемых величин. Получет1ие располагаемой реактивной мощности обеспечивается умножением величин располагаемого реактивного тока и измеренного напряжения.
Чтобь реализовать указанную последовательность операгд(й-, необходимо обеспечить формирование допустимого
л
тока статора I. ЭДС в поперечной
оси
(ГЛ, соответствующей допустимо т- 3
му гоку ротора 1г , синхронного реактанса Хц и реактивного сопротивления взаимоиндукции X в поперечной оси. Величина допустимого тока статора является постоянной величинор, которая обозначена на фиг,2 и 3 как 1, , До- пуст1 мьга ток статора для определения ДС в поперечной оси ((О при напряжениях и , превышающих номинальное и, до.пжен быть до величины Т , Условием снижения при этом является допустимый ток ротора . При небольших превышениях напряжения снижение, допустимого тока статора достигается путем применения эксплуатационного правипа - на каждый процент превышения напряжения должен приходиться процент снижения допустимого тока статора, ЗДС в поперечной оси Epi Qi , соответствующая допустимому
оку ротора li, и синхронный реактанс X Х „„ + ;,- 1{;огзмируются в после 1 LJ
довательности, ппреполяемой векторной диаграммой ил фиг, . Сначала находят внутреннюю )ДС г , , ,) кяк сумму векторов синусоидальных сигналов измеренного напрйжения IJ(U,U ,U ) и падения напряжения на активном соп- ротивлении г и индуктивном сопротивлении рассеяния Х, от протекания допустимого по величине и номинального по фазе тока статорной обмотки 1°(I. ,
J Эо ) .
E,.U+()(4)
Для большинства синхронных машин fjj, ничтожно мало, поэтому на диаграмме (фиг.З) составляющая г, не изоб- -ражена. Номинальная фаза допустимого
тока статора определена номинальным для машины коэффициентом мощности. Использование вектора допустимого тока 1(1 ,) с номинальной фазой основано на том, что изменение данной
фазы в пределах от номинальной до , т.е. изменение фазовой характеристики вектора (1,1) от номинальной до чисто реактивно-индуктивной,, практически не влияет на режим
магнитной системы синхронных машин малых и средних мощностей. Величину Е вектора откладывают по оси ординат характеристики холостого хода и с помощью последней определяют ток
намагничивания машины Т (1 , , ij ), Через начало координат XXX и точку (Ifp ,1 ) проводят прямую - нагрузочную характеристику. На фиг.З показаны три случая приведенной последовательности: при номинальном напряжении и, при и . Соответственно этим случаям электрическим на фиг.З присвоены верхние индексы н , м ,d . Последние также применены для обозначения нагрузочных характеристик. Изменение наклона нагру- зочгюй характеристики относительно некоторого базового режима, характеризуемого нагрузочной характеристикой. проходящей через точку XXX (1 о ), определяемую током намагничивания на холостом ходу машины If и внутренней ЭДС, равной номи- нал11ному напряжению, позволяет определить степень изменения синхронного реактанса Х и сопротивления взаимоиндукции X(jv относительно базовых величин XQ, Х , заданных в каталоге. Согласно фиг.З это можно сделать по формуле
.IfO fo .
(5)
где If ток намагничивания, опреде- ляегппм по Е ; .
СУ
- С1С
11
х:
X ) , можно
зная л о ( ас ос пс
найти падение напряжения на этом соп ротивлении (
Qt
jX I ) и вектор ЭДС в поперечной
оси Е
(О) (
Ё(а ), соответствующей допустимому току рото-г 3 / -г Эй т Зн -..За N ра 1(1 , If , If ):
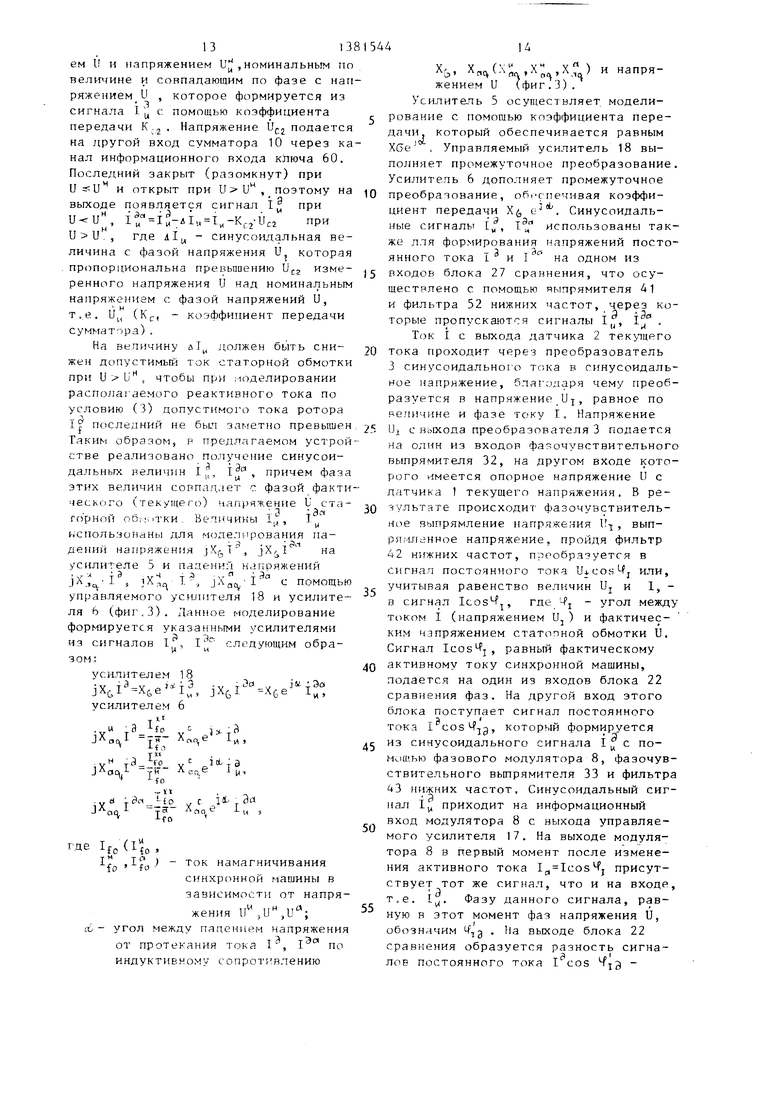
E(Q) U+((.) (6) Величина этого вектора и синхронный реактанс, соответствующий данному режиму магнитной системы:: XQ
т
, могут быть использованы в уравнении (3) для моделирования до13
пустимого реактивного тока по уело- 5 компаратор 57 срабатывает и откры- вию допустимого тока ротора. На фиг.З
вает (замыкает) ключ 60. Напряжение с выхода управляемого усилителя 17 должно быть равно по величине допустимому току статорной обмотки I , а по фазе оно совпадает с фактическим напряжением синхронной машины U, т.е. на выходе должен быть синусоидальный сигнал 1. Однако такой сигнал может быть достигнут благодаря функционированию контура стабилизации, включающего в свой состав, кроме управляемого усилителя 17, также вьшрямитель 35, фильтр 46 нижних частот и блок 25 сравнения. Фактически в первый момент после изменения входного синусоидального сигнала управляемого усилителя U на его выходах появляется сигнал I;, , который, следуя за U, отличается по величине от I . Сигнал 1у , пройдя через вьтрямитель 35 и фильтр 46, превращается в сигнал постоянного тока I , который подается на один из входов блока 25 сравнения, где сопоставляется с сигналом I, поступающим на другой его вход с блока 53 задания допустимого тока статора. Рассогласование между I и I с блока 25 воздействует на вход задания коэффициента усиления усилителя 17. При этом меняется коэффициент усиления этого усилителя в направлении, обеспечивающем уменьшение разности , т.е. так, чтобы сигнал i / на его выходе приближался к
представлены три случая определения EO(Q) соответственно при напряжениях , и, и. Видно, что имеет место существенная зависимость Еп(Ч и Хо от измеренного напряжения. Данные зависимости хорошо видны также на фиг.2, иллюстрирующей моделирование уравнений (2) и (3). Заметно на фиг.З ранее отмеченное неполное соответствие Е((0) допустимому току ротора If. Так, еслц за осндву считать соответствие то при и имеем Е при и имеем
1Г
;Ь)и
ir 1
f
(
ПосE taV и if l|. леднее имеет место, несмотря на снижение допустимого тока статора до величины I , что обусловлено несоответствием снижения допустимого тока статорной обмотки пропорционально повышению ее напряжения и нелинейности XXX, определяющей ток ротора.
Построения на фиг.2 и 3 выполнены Б относительных единицах с соблюдением масштабных соотношений.
Первичные напряжение и ток статорной обмотки синхронной машины подаются на входы датчиков 1 и 2 текущих соответственно напряжения и тока. Напряжение ,U с выхода датчика 1 использовано как входной синусоидальный сигнал для ряда блоков. В блоке сдвига фазы на 90° оно сдвигается по фазе на 90 в сторону опережения, т.е. на выходе имеет место сигнал JU, В сумматорах 11-13 напряжение суммируется с другими синусоидальными сигналами, в управляемом усилителе 17 за счет изменения коэффициента передачи оно стабилизируется по величине, равной допустимому току статорной обмотки I , а по фазе остается тем же самым. В блоке 23 сравнения фаз и фазочувствительных
15/4/412
выпрямителях 32 и 33 оно выполняет функцию опорного сигнала, и выпрямитель 36 и фильтр нижних частот 45 преобразуют его в напряжение постоянного тока и. Последнее подается на один из входов умножителя 20 и компаратора 57. На другой вход компаратора 57 поступает напряжение с блока 10 54 задания номинального напряжения статора, равное по величине номинальному напряжению синхронной машины и . При превьпиении фактическим напряжением и его номинального значения
5 компаратор 57 срабатывает и откры- З
20
25
30
35
40
45
50
55
вает (замыкает) ключ 60. Напряжение с выхода управляемого усилителя 17 должно быть равно по величине допустимому току статорной обмотки I , а по фазе оно совпадает с фактическим напряжением синхронной машины U, т.е. на выходе должен быть синусоидальный сигнал 1. Однако такой сигнал может быть достигнут благодаря функционированию контура стабилизации, включающего в свой состав, кроме управляемого усилителя 17, также вьшрямитель 35, фильтр 46 нижних частот и блок 25 сравнения. Фактически в первый момент после изменения входного синусоидального сигнала управляемого усилителя U на его выходах появляется сигнал I;, , который, следуя за U, отличается по величине от I . Сигнал 1у , пройдя через вьтрямитель 35 и фильтр 46, превращается в сигнал постоянного тока I , который подается на один из входов блока 25 сравнения, где сопоставляется с сигналом I, поступающим на другой его вход с блока 53 задания допустимого тока статора. Рассогласование между I и I с блока 25 воздействует на вход задания коэффициента усиления усилителя 17. При этом меняется коэффициент усиления этого усилителя в направлении, обеспечивающем уменьшение разности , т.е. так, чтобы сигнал i / на его выходе приближался к
. д
величине 1. При соответствующих параметрах контура стабилизации практически на его выходе присутствует сигнал 1„. Этот сигнал поступает на информационный вход фазового модулятора 8, другой вход сумматора 11, один из входов сумматора 10. На выходе имеем напряжение . U-U U-Ke3 1 разность между фактическим напряжени1313
ем и и напряжением U , номинальным гш и совпадающим по фазе с напряжением и , которое формируется из сигнала 1ц с помощью коэффициента передачи К,. Напряжение подается на другой вход сумматора 10 через канал информационного входа ключа 60. Последний закрыт (разомкнут) при
поэтому на при
и sU и открыт при , выходе появляется сигнал 1 , . I,-K,,Ucг при ., где А синусоидальная величина с фазой напряжения U которая пропорциональна превьпиению измеренного напряжения U над номинальным напряжением с фазой напряжений U, т..е. и (К с, - коэффициент передачи суммаT lpa) .
На величину &1 должен быть снижен допустимый ток статорной обмотки при и и , чтобы при 11(1делировании располагаемого реактивного тока по условию (3) допустимого тока ротора Ij последний не бьш заметно превьпиен Таким образом, Р предлагаемом устройстве реализовано получение синусоидальных величин I,-,, 1 причем фаза этих величин соппал,ает с фазой фактического (текущего) напряжение U ста- го рной о6г ;1тки. Величины Ijj , ьспользонаны для моделирования падений напряжения j Х., Т , JX,. на
усилителе 5 и падений напряжений
,.-- т Э ,г т 3 „1 т За
.b.. Т. , с помощью
управляемого усилителя 18 и усилителя 6 (фиг.З). Данное моделирование формируется указанными усилителями из сигналов зом;
и
1 следующим обра
18 l3, 6
с
- „ Заj i 3(3
Х,е I,
Х.,е
JS -ГЙ И
i«--;a
к
х т ---4J aq, T J-fo
де 1гЛ1
fo I I )
ТОК намагничивания синхронной машины в зависимости от напряжения и
tt - угол между падением напряжения от протекания тока I , I по индуктивному сопротивлению
Хл
.(.x:.,X,J и напряj - ftv na 01 ,1( жением U (фиг.3).
Усилитель 5 осуществляет моделирование с помощью коэффициента передачи, который обеспечивается равным XGe , Управляемый усилитель 18 выполняет промежуточное преобразование Усилитель 6 дополняет промежуточное преобразование, обпсг ечивая коэффициент передачи Х(;, е
J el
ные сигналь „ , I
За
Синусоидальиспользованы так5
0
0
5
0
5
0
же для формирования напряжений постоянного тока I и I на одном из входов блока 27 сравнения, что осуществлено с помощью выпрямителя 41 и фильтра 52 нижних частот, через которые пропускается сигналы 1, 1 ,
Ток I с выхода датчика 2 тек чцего тока проходит через преобразователь 3 синусоидальног о тока в синусоидальное напряжение, благодаря чему преобразуется в напряжение Uj, равное по величине и фазе току I. Напряжение Uj с выхода преобразователя 3 подается на один из входов фазочувствительного выпрямителя 32, на другом входе которого имеется опорное напряжение U с датчика 1 текущего напряжения. В результате происходит фазочувствитель- ное выпрямление напряжения U-i , выпрямленное напряжение, пройдя фильтр А2 нижних частот, преобразуется в сигнал постоянного тока U4.cosM j или, учитывая равенство величин Uj и 1, - в сигнал Icos, где --Pj - угол между током I (напряжением U.j ) и фактическим напряжением статопной обмотки U, Сигнал , равный фактическому активному току синхронной мащины, подается на один из входов блока 22 сравнения фаз. На другой вход этого блока поступает сигнал постоянного тока I cosM -jg, который формируется из синусоидального сигнала I с по- м.1шью фазового модулятора 8, фазочувствительного выпрямителя 33 и фильтра 43 нижних частот. Синусоидальный сигнал 1 приходит на информационный вход модулятора 8 с выхода управляемого усилителя 17. На выходе модулятора 8 в первый момент после изменения активного тока Ig Icos4 j присутствует тот же сигнал, что и на входе,
т,е. . Фазу данного сигнала, равную в этот момент фаз напряжения U, обозначим .,3 . На выходе блока 22 сравнения образуется разность сигнатд ic
ЛОВ постоянного тока I cos 15
-I cos .. Цанное рассогласование воздействует на вход задания сдвига фазы модулятора 8, благодаря чему фаза
Ч
jg изменяется. Изменение происходит за счет функционирования контура регулирования, состоящего из блока 22 сравнения, фазового модулятора 8, фа- зочувствительного выпрямителя 33 и фильтра 43 нижних частот. Изменение фазы -fj происходит в направлении уменьшения рассогласования. Процесс регулирования заканчивается при достижении фазой значения что эквивалентно получению равенства I cos - i3 Icos j I.,.
Синусоидальный сигнал (напряжение) с фазой хэ подается на вход фазовращателя 7, осуществляющего разложение этого сигнала на ортогональные сос- тавл«юп1ие. Чтобы обеспечить однозначность разложения, предусмотрен контур регулирования, состоящий из блока 24 сравнения, фазовращателя 7, выпрямителя 37, фильтра 47 нижних частот. Получающиеся на выходах ортогональные составляющие перераспределяются с помощью контура регулирования. Это происходит следующим образом. Первоначально образующаяся псевдоактивная составляющая 1д выпрямляется и сглаживается, проходя через блоки 37 и 47. В результате получается сигнал постоянного тока l , который подается на один из входов блока 24 сравнения На другой вход этого блока подан с выхода фильтра 42 сигнал постоянного тока, равный фактическому активному току, т.е. IcosMlj Ij. На выходе блока сравнения образуется рассогласование 1д-1д, которое воздействует на вход задания амплитуд ортогональных составляющих фазовращателя 7. В результате производится перераспределение ортогональных составляющих так, что происходит приближение 1„ к „ и рассогласование уменьшается. Минимум или отсутствие рассогласования соответствует такому разложению синусоидального сигнала I , что на одном выходе имеет место синусоидальный сигнал, равный фактическому активному току , а на другом выходе - синусоидальный сигнал, равный располагаемому реактивному току исходя из условия допустимого тока статорной обмотки, т.е. 1р-1р. Синусоидальный ток Тр, проходя через вьшрямитель 34 и фильтр 44 нижних частот, преобра
154416
зуется в сигнал гтостоянного тока 1, который подается на один из входов компаратора 56 и через канал первого
г информационного входа ключа 59 на другой вход умножителя 20. На другой Т5ХОД компаратора подается с элемента 28 выборки и хранения сигнала сигнал постоянного тока, равный величине
10 располагаемого реактивного тока исходя из условия допустимого тока рото- ра т.е. 1Г (lf. ). Если , TO компаратор 36, управляю- mi .fi ключом 59, находится в состончки,
(5 при котором канал первого инфорьпци- онного входа ключа 50 открыт, а канал второго информационного входа закрыт. В результате через ключ 59 на умножитель 20 поступает сигнал
20 LP , которьц выступает как располагаемый реактивный ток синхронной машины IP и участвует в формировании распо-- лагаемой реактивной мощности на выходе умножителя 20. Если TpIpP,,
25 то компаратор 56 и каналы ключа 59 находятся в противоположном состоянии. Тогда через канал второго информационного входа ключа 59 на вход блока 20 подается сигнал 1р1 . явля30 юшийся располагаемым током 1р ,
Работа узлов устройства rto формированию располагаемс Го реактивного
тЗР
тока IP по условию допустимого тока ротора Ij осуществляется лутем их активизации з двух режимах с помощью блока 58 синхронизации, упраяляюшего ключами 61 - 66. Первый режим характеризуется положешгем указанных клю40 чей, показано на фиг.1. Во втором режиме положение всех этих ключей противоположное. Рассмотрим первый режим, который можно назвать подготовительным или режимом форь)ирования
д5 синхронного реактанса Х и индуктивного сопротивления взаимоиндукции XOIQ с учетом нелинейности XXX, обусловленной изменением напряжения U. В этом режиме работают узлы и конту - ры, формирующие Хдд с помощью ключей 63, 66 и 61, 65.
В формировании X „д участвуют матор 12, выпрямитель 39, фильтр 50 нижних частот, блок 21 нелинейности типа экспоненты, ключ 63, управляемый усилитель 18, элемент 31 выборки и хранения сигнала, ключ 66, блок 26 сравнения и блок 55 задания тока холостого хода ротора, причем элемен35
1713
ты 26, 66, 31 и 18 образуют контур регулирования.
На ВХОДЫ сумматора 12 поступают синусоидальное напряжение U с датчика 1 напряжения и синусоидальный сиг нал (jX,ii X lt-e в зависимости от величины напряжения и) с выхода усилителя 5. На выходе имеет место синусоидальная внутрен- няя ЭДС:
U+jXj;I при и
Ё при и и,
ЭДС Е, Ё, Ё°, проходя через выпрямитель 39 и фильтр 50, преобразуется в сигнал постоянного тока , Е , Е,- , которьй подается на вход блока 21 нелинейности, моделирующего нелинейную зависимость XXX. На выходе блока 21 появляется сигнал постоянтю- го тока, равный току намагничивания синхронной машины соответственно Ij
при и и, I при , I
fo
при
. Сигнал тока намагничивания через открытый в данном режиме канал первого информационного входа ключа 63 подается на информационный вход управляемого усилителя 18. С выхода сигнал постоянного тока ,-., (1гп
г и -г iU IU
-fo fo подается на один из входов
j(X(.-bX:)
)i3(
i(x,-x;,i;;/i;,)
yifD )
fO I)
ИЛИ
. fCXs-+ Xo: If(5 / o-fp / i -лс .
j(XG+xS)(X6+xliro/It. )е ° 1н1 или
,т . . ,.И /,, ,, с IV , iJ ч i . л Д
( rCXu-bX i;, ,) ,
|J(X4+X,«)(X4+X.i;«/lJ,)e l3;i
(X4+x:)i (X6+x i; /i;ji x iS«.
и
Данная величина в виде сигнала постоянного тока поступает через открытый в данном режиме канал первого информационного входа ключа 61 на информационный вход управляемого усилителя 19. Первоначально на выходе присутствует эта же величина и она подана на BTopoii вход блока 27 сравнения, где сравнивается с величиной 1, , поступающей с фильтра 52 нижних частот. На выходе блока 27 сравнения образуется рассогласование, например,при U Х I -I , которое воздействует на вход задания коэффициента усиления усилителя 19 через канал информационного входа ключа 65 и элемент 30 выборки и хранения. Воздействие направлено на уменьщение рассогласования, что проявляется в соответствующем изменении
0
0
18
блока 26 сравнения, где сопоставляется с сигналом постоянного тока 1 , поступающим на другой вход с блока 55. Рассогласование If( с выхода блока 26 через канал информационного входа ключа 66 и элемент 31 приходит на вход задания коэффициента усиления усилителя 18. Рассогласование изменяет коэффициент усиления, пока оно не приблизится к нулю. В этом случае выходной сигнал приблизится к 1, а коэффициент передачи - к отношению
(1;:/1Г„.
т /т
J- 1« / I .
tfO tO lo -{0
,/.).
Благодаря запоминанию рассогласования на элементе 31 выборки и хранения управляющее воздействие не обеспечивающее достигнутый коэффициент передачи 1 /1 сохранится после закрытия (размыкания) ключа 66 при переходе во второй режим.
При формировании X участвуют элемент 29 выборки и хранения сигнала 29, ключи 61 и 65, управляемьш усили- 5 тель 19, элемент выборки и хранения- сигнала 30, блок 27 сравнения, которые образуют контур регулирования.
На элементе 29 выборки и хранения сигнала с конца предшествующего второго режима устройства хранится величина в зависимости от напряжения:
x;,i;;/i;,)
yifD )
fO I)
ИЛИ
f(5 / o-fp / i -лс .
xliro/It. )е ° 1н1 или
или
0
0
5
коэффициента усиления управляемого усилителя 19. При рассогласовании, равном нулю, на информационном входе появляется сигнал Хл1 , а на выходе - сигнал 1°. Тогда ког ффициент передачи становится 1/Х. Благодаря наличию элемента 30 выборки и хранения управляющее воздействие, соответствующее коэффициенту передачи 1/X, остается и после закрытия (размыкания) ключа 65 во втором режиме работы устройства.
Рассмотрим второй основной режим, при котором происходит моделирование располагаемого реактивного тока по
условию допустимого тока ротора т / т Эи уЭи т За If V J f , if ,
го режима осуществляется ключами 61-66 путем перевода их в противоположное положение с помсмцью блока
1л). Коммутация данно58 синхронизации. Синусоидальный допустимый ток статорной обмотки 1°, i с фазой измеренного напряжения U через открытьй во втором режиме канал второго информационного входа ключа 63 подведен к информационному входу управляемого усилителя 18. На выходе усилителя 17 присутствует сигнал в зависимости от величины напри- жения U: , i l p/lfo, /Ifo- Этот сигнал, пройдя усилитель 6, умножается на его коэффициент передачи, равный Холв и поступает на вход сумматора 16, на другой вход которого с выхода усилитапя 5 подан сигнал 1ц, i, умноженный на коэффициент его передачи X,. . В результате на выходе сумматора 16 получается сигнал с зависимости от
гХК /т w ч „i,,, V3.
напряжения U: (Xji+xL Irl/If,, ) „
е f ,-Лое iy , (.Л;;, fo / J.0 2 J-м.
(У, /т Т с fid io
, что эквивалентно j(X(;,+
) j(X(
j(Xg,+Xc,) . Данный сигнал, пройдя через выпрямитель АО и фильтр 51 нижних частот, преобразуется в
..и 3 -1Г -г о
сигнал постоянного тока: ХД , XQ , Хл , который через открытый во втором режиме канал информационного входа ключа 64 подается и запоминается на элементе 29 выборки и хранения сигнала 29. Также указанный синусоидальный сигнал подается на сумматор 13, где суммируется с напряжением U. На выходе формируется ЭДС в попереч
ной оси Е
пЗ,
0):
(qb{l -fjX l U%x;e l3 при , E3b(Q)u4jx;i U%x;e l при (0)U +jx;i u4x e l при
Сигнал ЕП (Q) поступает на информационный вход фазового модулятора 9, на выходе которого образуется сигнал Eq fQl, отлияаюпщйся от ) только фазой, которая зависит от управляющего воздействия, поступающего на вход задания сдвига фаз с фильтра 48 нижних частот. С выхода сигнал Ё о (Q) приходит на один из входов сумматора 14, где суммируется с напряжением JU с выхода блока 4. Поэтому на выходе присутствует сигнал jy+ (оЬри )пpи , (Q) при . Этот сигнал проходит через открытый во втором режиме канал второго информационного вхо
Q-jn
8154420
да ключа 61 на информационньй вход управляемого усилителя 19, у которого сохранен ко:1ффициент передачи I/X; (I/X 1/ х 1/Х), отработанный и первом режиме и запомненный элементом 30 выборки и хранения. Поэтому на выходе усилителя 19 присутствует сигнал:
iU%Kf (q „U
- Н О (К и
Р и и ,
JU%E (O)
15
Х J jU + )
X
М
и-:f- +
1
н
IQ
С1
при и
- II
при и и
Данный сигнал приходит на один игз входов сумматора 15. На другой вход поступает с второго выхода фазовращателя 7 синусоидальный сигнал, равный фактическому активному току I,-,. На выходе возникает синусоидальный сигимеющи у своих к он. и ; нал J --+1р-1д.
и
сти от величины напряжения U(U , U и ) . Этот сигнал подан на с-дин из входов блока 23 сравнения фаз, где сопоставляется на ортого -альность с напряжением U, поступающим на другой вход данного блока. При улах между
5
5
°
5
0
векторами U от 90
.и /
j v - -f4 ОТЛИЧНЫХ АО J
на выходе возникает рассогласование в виде сигнала постоянного или иной полярности. Если (jU/X +lp-i) д 90 ; то рассогласование положительное, а при г, 90 оно отрицательное, Рассогла Рсование q - 90 , проходя фильтр 48
нижних частот сглаживается, преобразуясь в сигнал постоянного тока, воздействующий на вход задания сдвига фаз фазового модулятора 9. На выходе последнего фаза Eg изменяется, следовательно, изменяется фаза векторов in и JU/XQ+IQ-IQ. За счет этого Q arg|U( J-- + IQ-I) приближается
о
к 90 . При этом снижается рассогласование, обусловленное отличием Ч д от 90 , При 4 q 90 рассогласование равно нулю. На выходе при этом сигнал можно обозначить f.(i), на ныходе
J-- + Iq , на выходе jU/X.-fIg -1.
Последний является располагаемым ре- активнь м током по условию допустимого
Эр ;
138
тока ротора l|, т.е. ip -jU/Xt + I - -Ig. Таким образом с помощью контура автоматического регулирования, состоящего из элементов 23, 48, 9, 14, 61, 19 , отрабатывается /(jU/Xc +iq° -1„) 90°, при этом вектор jU/XQ+i °-Io на выходе сумматора 15 становится равным располагаемому реактивному току ip по условию допустимого тока ротора. Синусоидальный сигнал Тр , проходя через выпрямитель 38, фильтр 49, преобразуется в сигнал постоянного тока IJ , который через открытый во втором режиме канал информационного входа ключа 62 подает- ся на вход элемента 28 выборки и хранения сигнала, на котором запоминается. Запомненный сигнал в конце второго режима работы устройства сохраняется на запоминающем элементе в течение всего первого подготовительного режима.
Первый и второй режимы работы предлагаемого устройства, реализующие моделирование располагаемого реактивного тока по условию допустимого тока ротора, следуют друг за другом с частотой, задаваемой блоком 58 синхронизации. Длительность первого и B-foporo режимов определяется парамет- рами контуров регулирования, активизируемых в каждом из режимов. Малые постоянные времени и больщие коэффициенты усиления контуров позволяют снизить время пребывания устройства в первом и втором режимах, что обеспечивает высокое качество моделирования. Действительно, отрабатываемые в первом режиме коэффициенты усиления управляемых усилителей 18 и 19 отли- чаются от требуемых коэффициентов передачи этих усилителей во втором режиме, так как были сформированы по информации предшествующего режима. Для стационарных режимов синхронной машины изменение ее параметров медленное и указанным обстоятельством можно пренебречь. Однако в переходных процессах изменение режимов и параметров машины происходит быстро. Следовательно, необходимо быстрое следование за ними при отработке коэффициентов передачи усилителей 17, 19 (первый режим) и использование данных коэффициентов (второй режим). Чем быстрее при этом сменяют друг друга режимы, тем качественнее моделирование располагаемого реактивного тока, точнее учет фактических параметров и
22
0
5
5 0 5 0 5
процессов в синхронной машине при этом.
Из схемы на фиг.1 видно, что в каждом из режимов работы устройства моделирования функционируют одноконтурные системы регулирования. В первом режиме одновременно и независимо друг от друга работают два контура, во втором режиме - опия контур. Одно- контурность систем регулирования позволяет осуществить выбор параметров контуров, обеспечивающ1гх высокое быстродействие регулирования. Это обуславливает то, что длительности первого и второго режимов могут быть приняты малыми.
Формула изобретения
Устройство для вычисления располагаемой реактивной мощности синхронной машины, содержащее датчик текущего напряжения статора, датчик текущего тока статора, выход которого через преобразователь тока в напряжение подключен к входу задания фазы первого фазочувствительного выпрямителя, выход которого через первый фильтр нижних частот соединен с первым входом первого блока сравнения фаз, выход которого подключен к входу задания сдвига фазы первого фазового модулятора, выход которого соединен с входом задания фазы второго фазочувствительного выпрямителя, выход которого через второй фильтр нижних частот подключен к второму входу первого блока сравнения, выход датчика текущего напряжения статора синхронной машины соединен с входом задания опорного сигнала первого фазочувствительного выпрямителя, с входом блока сдвига фазы на 90 и с входом задания опорного сигнала второго фазочувствительного выпрямителя, Отличающееся тем, что, с целью повышения точности, в него введены второй блок сравнения фаз, два усилителя, фазовращатель, второй фазовый модулятор, семь су тматоров, три управляемых усилителя, умножитель, блок задания нелинейности типа экспоненты, четыре блока сравнения, четыре элемента выборки и хранения сигнала, восемь выпрямителей, девять фильтров нижних частот, блок задания допустимого тока статора, блок задания номинального напряжения статора.
блок задания тока холостого хода ротора, два компаратора, блок синхронизации и восемь ключей, причем выход первого фильтра нижних частот соединен с первым входом первого блока сравнения, выход которого подключен к входу задания амплитуд ортогональных составляющих фазовращателя, первый выход которого через первый выпрямитель соединен с входом третьего фильтра нижних частот, выход которого подключен к первому информационному входу первого ключа и к первому входу первого компаратора, выход которого Соединен с управляющим входом первого ключа, второй информационный вход которого подключен к выходу первого элемента выборки и хранения сигнала и к второму входу первого компаратора, выход первого ключа соединен с первым входом умножителя, выход которого является выходом устройства, второй вход умножителя подключен к выходу четвертого фильтра нижних частот и к первому входу второго компаратора, второй вход которого соединен с выходом блока задания номинального напряжения статора, выход второго компаратора подключен к управляющему входу второго ключа, выход которого соединен с первым вхо дом первого сумматора, второй вход которого подключен к выходу первого управляемого усилителя, к информационному входу первого фазового модулятора, к первому входу второго сумматора, к входу второго выпрямителя, выход которого через пятый фильтр нижних частот соединен с первым входом второго блока сравнения j, второй вход которого подключен к выходу блока задания допустимого тока статора, выход второго блока сравнения соединен с входом задания коэффициента усиления первого управляемого усилителя, информационный вход которого подключен к выходу датчика текущего напряжения статора синхронной машины к первому входу второго блока сравнения фаз, к первым входам третьего и четвертого сумматоров, к второму входу второго сумматора и к входу третьего выпрямителя, выход которого подключен к входу четвертого фильтра нижних частот, выход второго суммато ра соединен с входом второго ключа, выход четвертого сумматора подключен к первому входу второго фазового мо
0
5
0
5
0 5
0
5
0
5
дулятора, выход которого соединен с первым входом пятого сумматора, второй вход которого подключен к выходу блока сдвига фаз на 90 , выход пятого сумматора соединен с первым входом третьего ключа, первый вход шестого сумматора подключен к входу четвертого выпрямителя и к второму выходу фазовращателя, информационный вход которого соединен с выходом первого фазового модулятора, выход четвертого выпрямителя через шестой фильтр нижних частот подключен к второму входу первого блока сравнения, выход шестого сумматора соединен с входом пятого выпрямителя и с вторым входом второго блока сравнения фаз, выход которого через седьмой фильтр нижних частот подключен к информационному входу второго фазового модулятора, выход пятого вьтрямителя через восьмой фильтр нижних частот подключен к информационному входу четвертого ключа, выход которого соединен с входом первого элемента выборки и хранения сигнала, выход третьего сумматора через шестой выпрямитель подключен к входу девятого фильтра нижних частот, выход которого через блок задания нелинейности типа экспоненты соединен с первым информационным входом пятого ключа, выход которого подключен к информационному входу второго управляемого усилителя, выход которого соединен с первым входом третьего блока сравнения и с входом первого усилителя, выход которого подключен к первому входу седьмого сумматора, выход которого соединен с вторым входом четвертого сумматора и с входом седьмого выпрямителя, выход которого через десятый фильтр нижних частот соединен с информационным входом шестого ключа, выход которого через второй элемент выборки и хранения сигнала подключен к второму информационному входу третьего ключа, выход которого соединен с входом задания коэффициента усиления третьего управляемого усилителя, выход которого подключен к второму входу шестого сумматора и к первому входу четвертого блока сравнения, выход которого соединен с информационным входом седьмого ключа, выход которого через третий элемент выборки и хранения сигнала подключен к информационному входу третьего управляемого усилителя, второй
25
информационный вход пятого ключа подключен к выходу первого сумматора, к входу второго усилителя и к входу восьмого выпрямителя, выход которого через одиннадцатый фильтр нижних частот подключен к второму входу четвертого блока сравнения, выход второго усилителя подключен к второму входу третьего сумматора и к второму входу седьмого сумматора, выход блока задания допустимого тока ротора соедиJu /xS
ju /х
гФ ;/r // -//
рм
flff
/ftf
{/гг
15А426
нен с вторым входом третьего блока сравнения, выход которого подключен к информационному входу восьмого ключа, выход которого через четвертый элемент выборки и хранения сигнала соединен с входом задания коэффициента усиления второго управляемого усилителя, выход блока синхронизации 10 подключен к управляющим входам третьего, четвертого, пятого, шестого, седьмого и восьмого ключей.
-7
«y
ffl2
-/ / с // ; ff
Ip2 1рг / ,. fffjif V/ - V/
| Бенина В.Д | |||
| и др | |||
| Статические измерительные преобразователи электрической мощности | |||
| М.: Энергия, 1972, Авторское свидетельство СССР № 110366, кл G 01 R 21/00, 1955. |
