Изобретение относится к радиотехнике.
Цель изобретения - обеспечение измерения вероятности ошибки на выходе демодулятора.
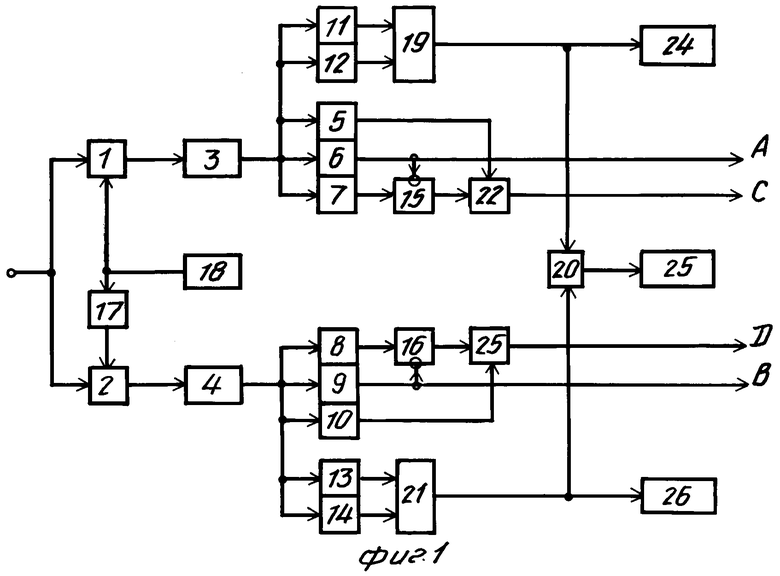
На фиг.1 изображена схема демодулятора; на фиг.2 и 3 - схемы, поясняющие работу.
Демодулятор содержит первый, второй фазовые детекторы 1, 2, первый, второй фильтры 3, 4 нижних частот, первый - десятый компараторы 5-14, первый, второй элементы И 15, 16, фазовращатель 17 на 90о, блок 18 восстановления несущей, первый - пятый элементы ИЛИ 19-23, первый, второй, третий счетчики 24-26.
Демодулятор работает следующим образом.
На вход демодулятора поступает сигнал КАМ-16 в виде:
Sвх=  A+
A+  cosωot+
cosωot+ B+
B+  sinωot, , (1) где A, B, C, D - выбираемые из множества /-1; +1/ информационные символы;
sinωot, , (1) где A, B, C, D - выбираемые из множества /-1; +1/ информационные символы;
ωo - несущая частота сигнала.
Представление сигнала КАМ-16 в виде (1) хорошо согласуется с суперпозиционным принципом формирования ансамбля КАМ-16.
Между передаваемыми информационными символами /-1; +1/ в каждом разряде квадруплета ABCD и битами тетрады битов при каждой сигнальной точке ансамбля КАМ-16 существует простое соответствие: символ -1 соответствует биту 0, а символ +1 соответствует биту 1.
Исходя из этого, можно сказать, что в тетраде битов, приписанных каждой сигнальной точке ансамбля КАМ-16 на фиг.2, первый бит соответствует символу A, второй - B, третий - С и четвертый - D. Так, тетрада 0101 означает передачу следующих символов: A = -1, B = +1, C = -1, D = +1.
Обозначим напряжение на выходе фильтра 3 как U3, напряжение на выходе фильтра 4 как U4 (фиг.2).
Из сопоставления расположения сигнальных точек ансамбля КАМ-16 и зон принятия решения на фиг.2 следует то, что на выходе компаратора 6 формируется символ A, на выходе компаратора 9 - символ B. Образование символа С происходит по правилу:
C = E +  F, (2) где E и F - двоичные данные на выходе компараторов 5 и 7 соответственно;
F, (2) где E и F - двоичные данные на выходе компараторов 5 и 7 соответственно;
+ - символ булевской операции сложения (ИЛИ).
Образование символа D происходит по аналогичному правилу.
При этом блоки 15, 22 и 16, 23 формируют уравнение вида (2) для определения символов С и D соответственно.
Рассмотрим, каким образом происходит восстановление данных при демодуляции, например, сигнальной точки S8 (см. фиг.3). При приеме сигнальной точки S8 на выходах ФНЧЗ и ФНЧЗ 4 напряжения будут таковы, что срабатывают компараторы 6 и 9 с нулевыми порогами и на первом выходе демодулятора появится бит 1 (A = + 1), на втором выходе появится бит 1 (B = +1). Поскольку компаратор 5 также сработает (ибо напряжение U3превышает пороговую для компаратора 5 величину +1), то через элемент ИЛИ 22 на третьем выходе демодулятора появится бит N (С = +1).
Компаратор 6 не срабатывает, ибо U4 не превышает пороговой для компаратора величины 1. Компаратор 8 срабатывает, так как порог составляет -1, но элемент И16 будет закрыт по инверсному входу сигналом с выхода компаратора 9 и в итоге на выходе ИЛИ 23 будет сформирован бит 0 (D = -1). Данный набор битов 1110 полностью соответствует коду на фиг.2 для точки S8 (фиг. 3).
При передаче любой сигнальной точки S1-S16 логика работы компараторов 5-15, элементов И15, 16 и элементов ИЛИ 22, 23 такова, что всегда на первом выходе демодулятора будет формироваться символ A, на втором выходе - символ B, на третьем - символ С, на четвертом - символ D (см. фиг.1) в соответствии с выбранным манипуляционным кодом (см. фиг.2).
Рассмотрим, каким образом происходит измерение вероятности ошибки на выходе демодулятора.
Поскольку предлагаемый демодулятор принимает решения по критерию идеального наблюдателя, то ошибки при приеме символов ансамбля КАМ-16 происходят в демодуляторе только тогда, когда передаваемая сигнальная точка под воздействием шума попадает на сигнальной плоскости в зону принятия решения, соответствующей другой сигнальной точке. Так, при приеме символа S4' (см. фиг. 3) демодулятор выносит решение в пользу ближайшей разрешенной сигнальной точки S4, и ошибки не происходит. Если же под воздействием шума передаваемая точка занимает место S4'' (т.е. попадает в зону решения другой сигнальной точки), то решение выносится в пользу точки S3 (см. фиг.3) и на выходе демодулятора возникает ошибка в символе.
Такие ошибки при приеме полностью случайного информационного сигнала (не имеющего корреляционной связи между символами) никаким образом не могут быть обнаружены. Однако, если положить, что вероятностью пересечения вектором шума более чем одной границы на решающей сети (фиг.3) можно пренебречь (что всегда выполняется на практике), то в этом случае, наблюдая за попаданием точек в дополнительные зоны, можно измерять вероятность ошибок.
Действительно, пребывание точки S4''' в заштрихованной зоне не приводит к возникновению ошибки (поскольку решение выносится в пользу истинной точки S , который при передаче любой из точек S1-S3, S5-S7, S9-S11, S13-S15 привел бы к возникновению ошибки.
, который при передаче любой из точек S1-S3, S5-S7, S9-S11, S13-S15 привел бы к возникновению ошибки.
Перейдем к строгому доказательству возможности измерения вероятности ошибки в заявляемом устройстве.
Вероятность PGU пребывания точки в левой полуплоскости, ограниченной прямой (GU), определяется по формуле
PGU = PS1. Pш + PS5 . Pш + PSg. Pш +
+ PS13.Pш, (3) где PS1 = PS5 = PS9 = PS13 - априорные вероятности передачи сигнальных точек S1, S5, S9, S13;
Pш - вероятность того, что шум уведет передаваемую точку влево за границу GU.
Поскольку все сигнальные точки ансамбля КАМ-16 передаются с одинаковой вероятностью, равной 1/16, то формулу 3 можно преобразовать к виду:
PGU=  Pш (4)
Pш (4)
Поскольку шум "уводит" сигнальные точки от их истинного положения в соединение зоны принятия решения с одинаковой вероятностью (канал симметричен), то
Pш=  Pош,, (5) где Poш - вероятность ошибки на выходе демодулятора. Подставляя выражение (5) в выражение (4), имеем:
Pош,, (5) где Poш - вероятность ошибки на выходе демодулятора. Подставляя выражение (5) в выражение (4), имеем:
PGU=  Pош (6) Аналогично этому, вероятность пребывания точки в правой полуплоскости, ограниченной прямой KQ, есть
Pош (6) Аналогично этому, вероятность пребывания точки в правой полуплоскости, ограниченной прямой KQ, есть
PKQ=  Pош.. (7)
Pош.. (7)
Поскольку события, заключающиеся в нахождении сигнальной точки слева от прямой GU или справа от прямой KQ, несовместимы, то вероятность того, что произойдет любое из этих событий, есть сумма вероятностей, определяемых формулами (4) и (7)
P19= Pош+
Pош+  Pош=
Pош=  Pош.. (8)
Pош.. (8)
Факт появления сигнальной точки слева от прямой GU определяется по срабатыванию компаратора 12 с порогом срабатывания -2. Факт появления сигнальной точки справа от прямой KQ определятся по срабатыванию компаратора 11 с порогом срабатывания +2. Прямые GU и KQ пересекают ось абсцисс на фиг. 2 именно в точках -2 и +2. Значит, объединяя по ИЛИ 19 выходы компараторов 11 и 12, можно измерять вероятность ошибки в символе по данному квадратурному каналу (по оси U3 на фиг.2). Поток импульсов с выхода элемента ИЛИ 19 поступает на счетчик 24. Умножая на коэффициент, равным 8, показания счетчика 24 (в соответствии с формулой (8)), можно определить вероятность ошибки в символах A и C на выходе демодулятора.
Аналогично этому, вероятность ошибки в символах B и D можно определить по показаниям счетчика 26 (также через коэффициент, равный 8).
Итоговую вероятность (по всем символам A,B,C,D) ошибки можно определить по показаниям счетчика 25, умножая их на 4.
При этом вероятность ошибки определяется так:
Pош=  ,, (9) где Рош - вероятность ошибки на выходе демодулятора;
,, (9) где Рош - вероятность ошибки на выходе демодулятора;
N25 - показания счетчика 25;
N - длительность интервала наблюдения в тактах.


Сущность изобретения: демодулятор содержит два фазовых детектора, два фильтра нижних частот, десять компараторов, два элемента И, фазовращатель на 90°, блок восстановления несущей, пять элементов ИЛИ, три счетчика. 3 ил.
ДЕМОДУЛЯТОР СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ, содержащий блок восстановления несущей, выход которого подключен к второму входу первого фазового детектора, первый вход которого соединен с первым входом второго фазового детектора, и к входу фазовращателя на 90o, выход которого соединен с вторым входом второго фазового детектора, при этом выходы первого и второго фазовых детекторов через соответственно первый и второй фильтры нижних частот подключены к входам первого, второго, третьего, четвертого, пятого и шестого компараторов, а выходы второго и пятого компараторов являются соответственно первым и вторым выходами демодулятора, входом которого является первый вход первого фазового детектора, отличающийся тем, что, с целью обеспечения измерения вероятности ошибки на выходе демодулятора, введены три счетчика, пять элементов ИЛИ, седьмой, восьмой, девятый и десятый компараторы и два элемента И, причем выход первого фильтра нижних частот подключен к входам седьмого и восьмого компараторов, выходы которых соединены с входами первого элемента ИЛИ, выход которого подключен к входу первого счетчика и первому входу второго элемента ИЛИ, выход и второй вход которого соединены соответственно с входом второго счетчика и входом третьего счетчика, который подключен к выходу третьего элемента ИЛИ, входы которого соединены с выходами девятого и десятого компараторов, к входам которых подключен выход второго фильтра нижних частот, при этом выходы первого и третьего компараторов соединены соответственно с первым входом четвертого элемента ИЛИ и прямым входом первого элемента И, инверсный вход и выход которого соединены соответственно с выходом второго компаратора и вторым входом четвертого элемента ИЛИ, выход которого является третьим выходом демодулятора, четвертым выходом которого является выход пятого элемента ИЛИ, входы которого соединены соответственно с выходами шестого компаратора и второго элемента И, к прямому и инверсному входам которого подключены соответственно выходы четвертого и пятого компараторов.
| Leclert A and Vondamme P "Univerzal Carrier Recvvery Loop for QASK and PSK Signal Letz, JEEE Frnnzactionz in Communisationz, 1983, Vol COM-31, Nl, p.p | |||
| Реверсивный дисковый культиватор для тросовой тяги | 1923 |
|
SU130A1 |
