Изобретение относится к радиотехнике и может быть использовано при демодуляции сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции (КАМ-16).
Известен демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащий два фазовых детектора, два фильтра нижних частот, фазовращатель и два квантователя (см. патент РФ 2020767, МКИ 5 H 04 L 27/22, опубл. БИ 18, 30.09.94 г.) [1].
Недостатком известного демодулятора является то, что уровень входного сигнала КАМ-16 не подстраивается в процессе работы так, чтобы всегда оптимальным образом соответствовать уровням срабатывания квантователей. Между тем уровни срабатывания квантователей установлены равными (0; +1; -1) в каждом из каналов известного устройства именно в предположении об оптимальном уровне сигнала на входе устройства. Пороги квантователей образуют шестнадцать зон принятия решений для каждой точки сигнала КАМ-16 и в том случае, если уровень сигнала на входе оказывается отличным от нормативного, зоны приниятия решений оказываются сформированными неоптимально (отличными от критерия Котельникова-Зигерта [2] ), что приводит к увеличению вероятности ошибки на выходе демодулятора и соответствующему снижению помехоустойчивости.
Известно также устройство приема дискретных сигналов с относительно фазовой модуляцией низкой кратности, содержащее автоматический регулятор уровня и АЦП (см. А.С. 1467786, МКИ 4 H 04 L 27/22, опубл. БИ 11, 23.03.89) [3].
Недостатком известного устройства является невозможность приема (демодуляции) сигналов КАМ-16.
Отметим также, что вообще операция согласования уровня входного сигнала и порогов срабатывания квантователей в демодуляторах ФМ сигналов не является обязательной, поскольку ФМ сигнал не передает информации, заложенной в амплитуде и, следовательно, уровень входного ФМ сигнала может меняться в широких пределах без потери помехоустойчивости демодулятора [4, 5].
Известен также цифровой приемник многопозиционных сигналов, содержащий усилитель, блок выделения несущего колебания, два АЦП (см. А.С. 1062890, МКИ (3) H 04 L 27/22, опубл. БИ 47, 23.12.83 г.) [6].
Недостатки известного устройства состоят в следующем.
Известное устройство может принимать сигналы с комбинированной амплитудно-фазовой манипуляцией. Усилитель входного сигнала выполнен как усилитель с автоматической стабилизацией уровня входного сигнала (АРУ). В связи с наличием в ансамбле КАМ-16 сигнальных точек с разной амплитудой в цепи автоматической регулировки мощности входного сигнала существует большая дисперсия (даже в отсутствие аддитивного Гауссовского шума). Увеличение же постоянной времени интегрирования в цепи регулировки АРУ приводит к тому, что такая АРУ является чересчур "грубой", не способна отслеживать быстрые изменения уровня сигнала КАМ-16 (например, замирания), что в итоге приводит к низкой помехоустойчивости известного устройства.
Из известных технических решений наиболее близким к патентуемому устройству (прототипом) является демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащий блок восстановления несущей, выход которого подключен ко второму входу первого фазового детектора и через фазовращатель на 90o - ко второму входу второго фазового детектора, первый вход которого соединен с первым входом первого фазового детектора и является входом демодулятора, выходы первого и второго фазовых детекторов соединены, соответственно, с входами первого и второго фильтров нижних частот, при этом входы первого, второго, третьего, седьмого и восьмого компараторов соединены, а выходы седьмого и восьмого компараторов соединены с входами первого элемента ИЛИ, выход которого подключен к входу первого счетчика и первому входу второго элемента ИЛИ, выход и второй вход которого соединены, соответственно, с входом второго счетчика и входом третьего счетчика, который подключен к выходу третьего элемента ИЛИ, входы которого соединены с выходами девятого и десятого компараторов, входы которых соединены с входами четвертого, пятого и шестого компараторов, при этом выходы второго и пятого компараторов являются, соответственно, первым и вторым выходами демодулятора, выходы первого и третьего компараторов соединены, соответственно, с первым входом четвертого элемента ИЛИ и прямым входом первого элемента И, инверсный вход и выход которого соединены, соответственно, с выходом второго компаратора и вторым входом четвертого элемента ИЛИ, выход которого является третьим выходом демодулятора, четвертым выходом которого является выход пятого элемента ИЛИ, входы которого соединены, соответственно, с выходами шестого компаратора и второго элемента И, к прямому и инверсному входам которого подключены, соответственно, выходы четвертого и пятого компараторов (см. А.С. 2019051, МКИ 5 H 04 L 27/22, опубл. БИ 16, 30.08.94 г.) [9].
Недостатком известного демодулятора является низкая помехоустойчивость, обусловленная тем, что уровень входного сигнала КАМ-16 не подстраивается в процессе работы так, чтобы всегда соответствовать зонам принятия решений, установленным оптимально по критерию идеального наблюдателя.
Кроме того, несмотря на то, что устройство-прототип позволяет измерять вероятность ошибки на выходе демодулятора, оно не способно уменьшать эту вероятность за счет оптимизации уровня входного сигнала.
Технический результат - повышение помехоустойчивости демодуляции сигналов КАМ-16 за счет поддержания уровня входного сигнала, соответствующим оптимальным зонам принятия решений, - достигается выполнением следующих операций над сигналом:
- каждую демодулированную тетраду информационных символов ABCD дешифруют и определяют номер зоны принятия решения, к которой демодулятор отнес принятую сигнальную точку;
- устанавливают циклически повторяющийся интервал счета m тактов;
- подсчитывают за выбранный интервал счета m количество сигнальных точек, отнесенных демодулятором к любой из четырех зон принятия решений, номера которых соответствуют входному сигналу с максимальной амплитудой;
- подсчитывают за выбранный интервал счета количество сигнальных точек, отнесенных демодулятором к любой из четырех зон принятия решений, номера которых соответствуют входному сигналу с минимальной амплитудой;
- один раз в конце выбранного интервала счета сравнивают подсчитанные количества демодулированных сигнальных точек с максимальной и минимальной амплитудой и, в случае их несовпадения, изменяют на одну дискрету уровни сигналов на управляющих входах управляемых усилителей, включенных в синфазный и квадратурный каналы демодулятора, при этом:
- в случае, если количество сигнальных точек с максимальной амплитудой больше (меньше) количества сигнальных точек с минимальной амплитудой, изменяют уровень сигнала на управляющих входах усилителей таким образом, чтобы оно приводило к уменьшению (увеличению) сигнала на их соответствующих выходах.
Таким образом, замыкается петля автоматической регулировки усиления, причем уровень входного сигнала КАМ-16 точно поддерживается соответствующим оптимальным зонам принятия решений, что повышает помехоустойчивость демодулятора.
Это достигается тем, что демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции содержит блок восстановления несущей, выход которого подключен ко второму входу первого фазового детектора, и через фазовращатель на 90o - ко второму входу второго фазового детектора, первый вход которого соединен с первым входом первого фазового детектора и является входом демодулятора, выходы первого и второго фазовых детекторов соединены, соответственно, с входами первого и второго фильтров нижних частот, при этом входы первого, второго, третьего, седьмого и восьмого компараторов соединены, а выходы седьмого и восьмого компараторов соединены с входами первого элемента ИЛИ, выход которого подключен к входу первого счетчика и первому входу второго элемента ИЛИ, выход и второй вход которого соединены, соответственно, с входом второго счетчика и входом третьего счетчика, который подключен к выходу третьего элемента ИЛИ, входы которого соединены с выходами девятого и десятого компараторов, входы которых соединены с входами четвертого, пятого и шестого компараторов, при этом выходы второго и пятого компараторов являются, соответственно, первым и вторым выходами демодулятора, выходы первого и третьего компараторов соединены, соответственно, с первым входом четвертого элемента ИЛИ и прямым входом первого элемента И, инверсный вход и выход которого соединены, соответственно, с выходом второго компаратора и вторым входом четвертого элемента ИЛИ, выход которого является третьим выходом демодулятора, четвертым выходом которого является выход пятого элемента ИЛИ, входы которого соединены, соответственно, с выходами шестого компаратора и второго элемента И, к прямому и инверсному входам которого подключены, соответственно, выходы четвертого и пятого компараторов.
Согласно изобретению в него введены дешифратор, шестой и седьмой элементы ИЛИ, четвертый, пятый и шестой счетчики, блок сравнения, реверсивный счетчик, цифроаналоговый преобразователь и два управляемых усилителя, причем первый, второй, третий и четвертый входы дешифратора подключены, соответственно, к первому, второму, третьему и четвертому выходам демодулятора, первый, второй, третий и четвертый выходы дешифратора соединены с соответствующими входами шестого элемента ИЛИ, выход которого соединен с первым входом четвертого счетчика, выход которого соединен с первым входом блока сравнения, второй вход которого соединен с выходом пятого счетчика, вход которого соединен с выходом седьмого элемента ИЛИ, входы которого соединены, соответственно, с пятым, шестым, седьмым и восьмым выходами дешифратора, выход шестого счетчика соединен со вторыми входами четвертого, пятого и реверсивного счетчиков, первый и третий входы реверсивного счетчика соединены, соответственно, с первым и вторым выходами блока сравнения, выход реверсивного счетчика соединен с входом цифроаналогового преобразователя, выход которого соединен со вторыми входами управляемых усилителей, вход и выход первого управляемого усилителя соединен, соответственно, с выходом первого фильтра нижних частот и входом первого компаратора, вход и выход второго управляемого усилителя соединен, соответственно, с выходом второго фильтра нижних частот и входом четвертого компаратора.
На фиг.1 приведена функциональная схема демодулятора сигналов КАМ-16.
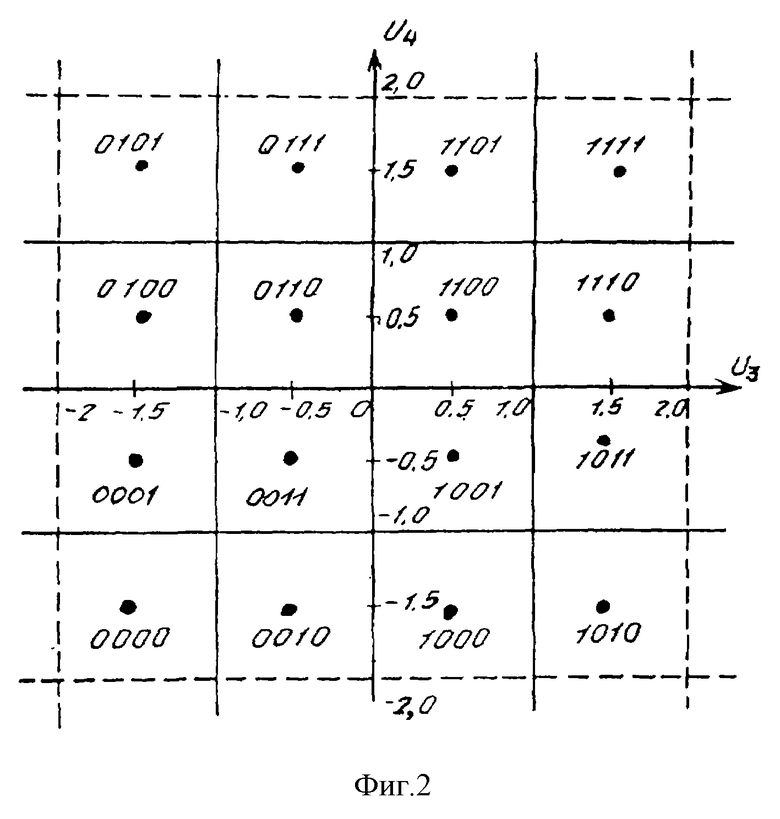
На фиг.2 приведены сигнальные точки ансамбля КАМ-16 и соответствующие им оптимальные зоны принятия решений.
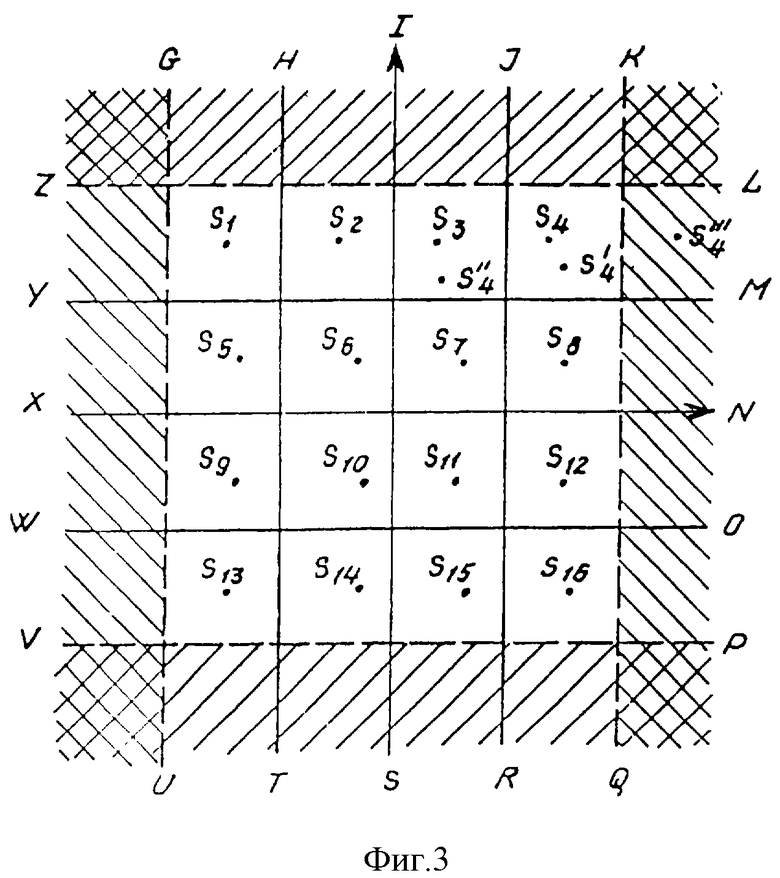
Фиг.3 иллюстрирует принцип измерения вероятности ошибки на выходе демодулятора.
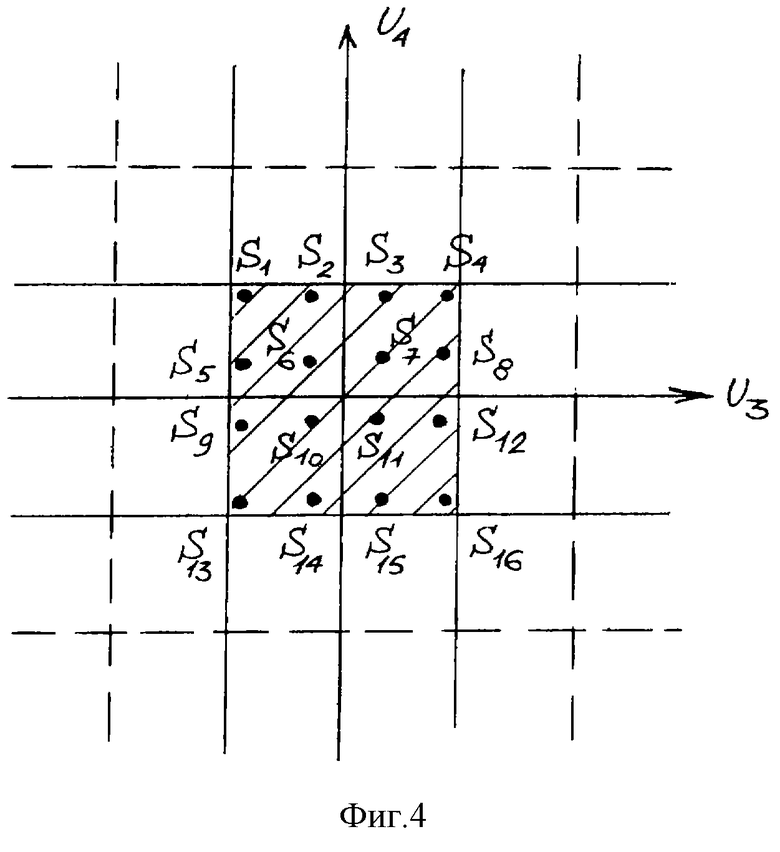
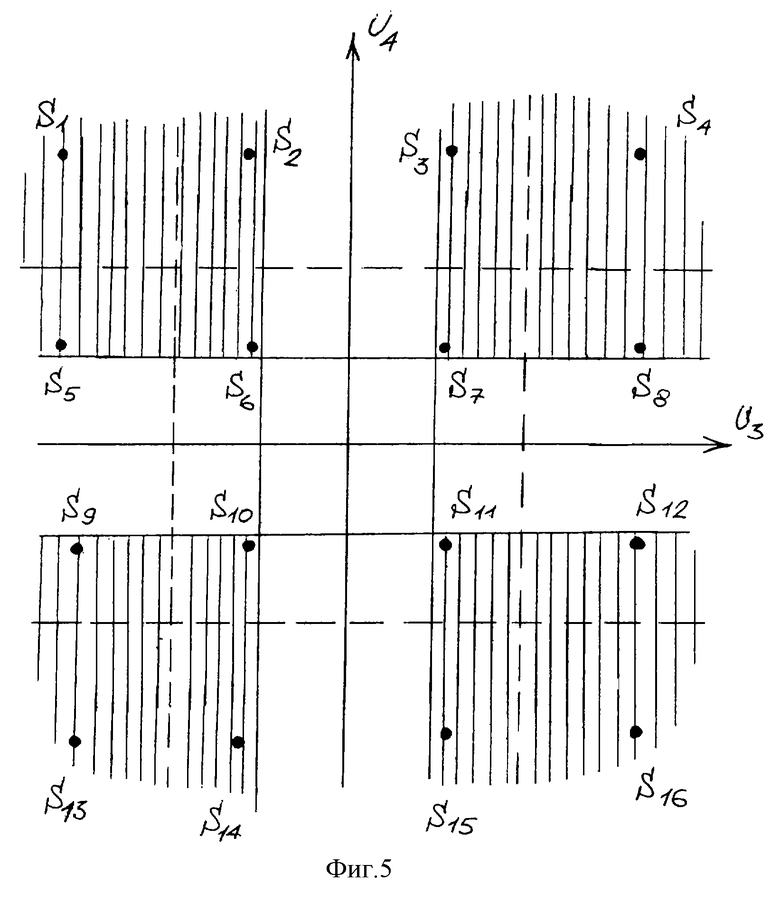
Фиг. 4 и 5 иллюстрирует принцип поддержания оптимальным (соответствующим максимальной помехоустойчивости) уровня входного сигнала.
Демодулятор сигналов КАМ-16 содержит первый, второй фазовые детекторы 1, 2, первый, второй фильтры 3, 4 нижних частот, первый - десятый компараторы 5-14, первый, второй элементы И 15, 16, фазовращатель 17 на 90o, блок 18 восстановления несущей, первый - пятый элементы ИЛИ 19-23, первый, второй, третий счетчики 24-26, дешифратор 27, шестой и седьмой элементы ИЛИ 28, 29, четвертый - шестой счетчики 30-32, блок 33 сравнения, реверсивный счетчик 34, цифроаналоговый преобразователь (ЦАП) 35, первый и второй управляемые усилители 36, 37.
Демодулятор работает следующим образом. На вход демодулятора поступает сигнал КАМ-16 в виде
где А, В, С, D - выбираемые из множества /-1; +1/ информационные символы;
w0 - несущая частота сигнала.
Представление сигнала КАМ-16 в виде (1) хорошо согласуется с суперпозиционным принципом формирования ансамбля КАМ-16.
Между передаваемыми информационными символами /-1; +1/ в каждом разряде квадруплета ABCD и битами тетрады битов при каждой сигнальной точке ансамбля КАМ-16 существует простое соответствие: символ -1 соответствует биту 0, а символ +1 соответствует биту 1.
Исходя из этого можно сказать, что в тетраде битов, приписанных каждой сигнальной точке ансамбля КАМ-16 на фиг.2 первый бит соответствует символу А, второй - В, третий - С и четвертый - D. Так, тетрада 0101 означает передачу следующих символов: А=-1, В=+1, С=-1, D=+1.
Обозначим напряжение на выходе фильтра 3 как U3, напряжение на выходе фильтра 4 как U4 (фиг.2).
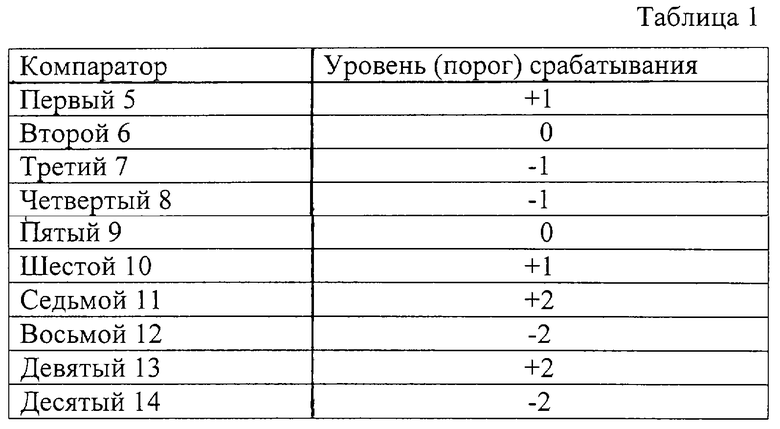
На выходе любого из компараторов формируется логическая 1, если уровень на его входе превышает порог срабатывания (и наоборот).
Пороги срабатывания компараторов приведены в таблице 1.
Из сопоставления расположения сигнальных точек ансамбля КАМ-16 и зон принятия решения на фиг.2 следует то, что на выходе компаратора 6 формируется символ А, на выходе компаратора 9 - символ В.
Образование символа С происходит по правилу
где Е и F - двоичные данные на выходе компараторов 5 и 7, соответственно;
+ - символ булевской операции сложения (ИЛИ).
Образование символа D происходит по аналогичному правилу.
При этом блоки 15, 22 и 16, 23 формируют уравнение вида (2) для определения символов С и D соответственно.
Рассмотрим, каким образом происходит восстановление данных при демодуляции, например, сигнальной точки S8 (см. фиг.3). При приеме сигнальной точки S8 на выходах ФНЧ3 и ФНЧ4 напряжения будут таковы, что срабатывают компараторы 6 и 9 с нулевыми порогами и на первом выходе демодулятора появится бит 1 (А=+1), на втором выходе появится бит 1 (B=+1). Поскольку компаратор 5 также сработает (ибо напряжение U3 превышает пороговую для компаратора 5 величину +1), то через элемент ИЛИ 22 на третьем выходе демодулятора появится бит 1 (С=+1).
Компаратор 10 не срабатывает, ибо U4 не превышает пороговой для компаратора величины 1. Компаратор 8 срабатывает, так как порог составляет -1, но элемент И 16 будет закрыт по инверсному входу сигналом с выхода компаратора 9 и в итоге на выходе ИЛИ 23 будет сформирован бит 0 (D=-1). Данный набор битов 1110 полностью соответствует коду на фиг.2 для точки S8 (фиг.3).
При передаче любой сигнальной точки S1-S16 логика работы компараторов 5-14, элементов И 15, 16 и элементов ИЛИ 22, 23 такова, что всегда на первом выходе демодулятора будет формироваться символ А, на втором выходе - символ В, на третьем - символ С, на четвертом - символ D (см. фиг.1) в соответствии с выбранным манипуляционным кодом (см. фиг.2).
Рассмотрим, каким образом происходит измерение вероятности ошибки на выходе демодулятора.
Поскольку патентуемый демодулятор принимает решения по критерию идеального наблюдателя, то ошибки при приеме символов ансамбля КАМ-16 происходят в демодуляторе только тогда, когда передаваемая сигнальная точка под воздействием шума попадает на сигнальной плоскости в зону принятия решения, соответствующей другой сигнальной точке. Так, при приеме символа S'4 (см. фиг.3) демодулятор выносит решение в пользу ближайшей разрешенной сигнальной точки S4, и ошибки не происходит. Если же под воздействием шума передаваемая точка занимает место S''4 (т.е. попадает в зону решения другой сигнальной точки), то решение выносится в пользу точки S3 (см. фиг.3), и на выходе демодулятора возникает ошибка в символе.
Факт такой ошибки при приеме полностью случайного информационного сигнала (не имеющего корреляционной связи между символами) никаким образом не может быть обнаружен. Однако, если положить, что вероятностью пересечения вектором шума более чем одной границы на решающей сети (фиг.3) можно пренебречь (что всегда выполняется на практике), то, в этом случае, наблюдая за попаданием точек в дополнительные зоны, можно измерять вероятность ошибок.
Действительно, пребывание точки S'''4 в заштрихованной зоне не приводит к возникновению ошибки (поскольку решение выносится в пользу истинной точки S'4), однако при этом можно составить представление о действующем на входе векторе шума  который при передаче любой из точек S1-S3, S5-S7, S9-S11, S13-S15 привел бы к возникновению ошибки.
который при передаче любой из точек S1-S3, S5-S7, S9-S11, S13-S15 привел бы к возникновению ошибки.
Перейдем к строгому доказательству возможности измерения вероятности ошибки в заявляемом устройстве.
Вероятность РGU пребывания точки в левой полуплоскости, ограниченной прямой (GU), определяется по формуле
PGU=PS1•Pш+PS5•Рш+PS9•Pш+PS13•Рш, (3)
где PS1= PS5=PS9=PS13 - априорные вероятности передачи сигнальных точек S1, S5, S9, S13;
Рш - вероятность того, что шум уведет передаваемую точку влево за границу GU.
Поскольку все сигнальные точки ансамбля КАМ-16 передаются с одинакововой вероятностью, равной 1/16, то формулу (3) можно преобразовать к виду
Поскольку шум "уводит" сигнальные точки от их истинного положения в соседние зоны принятия решения с одинаковой вероятностью (канал симметричен), то
где Рош - вероятность ошибки на выходе демодулятора.
Подставляя выражение (5) в выражение (4), имеем
Аналогично этому вероятность пребывания точки в правой полуплоскости, ограниченной прямой KQ, есть
Поскольку события, заключающиеся в нахождении сигнальной точки слева от прямой GU или справа от прямой KQ, несовместимы, то вероятность того, что произойдет любое из этих событий, есть сумма вероятностей, определяемых формулами (4) и (7)
Факт появления сигнальной точки слева от прямой GU определяется по срабатыванию компаратора 12 с порогом срабатывания -2. Факт появления сигнальной точки справа от прямой KQ определяется по срабатыванию компаратора 11 с порогом срабатывания +2. Прямые GU и KQ пересекают ось абсцисс на фиг.2 именно в точках -2 и +2. Значит, объединяя по ИЛИ 19 выходы компараторов 11 и 12, можно измерять вероятность ошибки в символе по данному квадратурному каналу (по оси U3 на фиг.2).
Поток импульсов с выхода элемента ИЛИ 19 поступает на счетчик 24. Умножая на коэффициент, равный 8, показания счетчика 24 (в соответствии с формулой (8)), можно определить вероятность ошибки в символах А и С на выходе демодулятора.
Аналогично этому вероятность ошибки в символах В и D можно определить по показаниям счетчика 26 (также через коэффициент, равный 8).
Итоговую вероятность (по всем символам A, B, C, D) ошибки можно определить по показаниям счетчика 25, умножая их на 4.
При этом вероятность ошибки определяется так:
где Рош - вероятность ошибки на выходе демодулятора;
N25 - показания счетчика 25;
N - длительность интервала наблюдения в тактах.
Рассмотрим, каким образом происходит подсчет количества сигнальных точек с максимальной (минимальной) амплитудой, принятых за период счета.
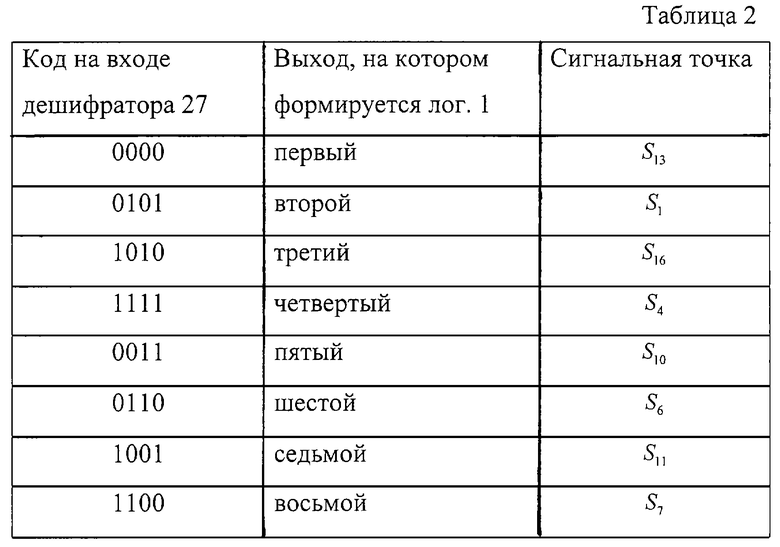
Дешифратор 27 является обычным дешифратором двоичных кодов, поступающих на его вход, при этом первый вход дешифратора 27 соответствует старшему разряду, а четвертый вход - младшему. Кроме того, логическая 1 формируется на одном из выходов дешифратора при поступлении на его вход кодов в соответствии с таблицей 2, где показаны номера сигнальных точек, соответствующих кодам на входах дешифратора 27.
В соответствии с этим и логикой работы элементов ИЛИ 30 и 31 показания N30 четвертого счетчика 30 будут означать количество сигнальных точек максимального уровня (S13; S1; S16; S4), демодулированных за интервал счета, а показания N31 пятого счетчика 31 - количество сигнальных точек минимального уровня (S10; S6; S11; S7), демодулированных за тот же интервал. Интервал счета m тактов, определяемый шестым счетчиком 32, выбирается по различным соображениям от m=1 до m=(10÷100)x16.
Показания четвертого 30 и пятого 31 счетчиков сравниваются блоком сравнения 33, на первом выходе которого формируется логическая 1 (на втором выходе формируется 0), если N30>N31. Если N30<N31, то логическая единица формируется на втором выходе (на первом выходе формируется 0). Если N30=N31, то на обоих выходах блока 33 формируются логические 0. Блок сравнения 33 может быть реализован как устройство для сравнения чисел, описанное в работах [7, 8].
Первый вход реверсивного счетчика 34 является входом уменьшения его состояния; третий вход - входом увеличения его состояния, а второй вход - входом разрешения изменения состояния (записи).
В конце каждого интервала наблюдения (по истечении m тактов) на выходе шестого счетчика 32 формируется сигнал разрешения изменения состояния реверсивного счетчика 34 и обнуления состояний счетчиков 30 и 31 перед новым интервалом счета.
Следовательно, при превышении за интервал счета количества сигнальных точек с максимальной (минимальной) амплитудой над количеством сигнальных точек с минимальной (максимальной) амплитудой, состояние реверсивного счетчика в конце каждого интервала счета уменьшается (увеличивается) на единицу.
Так происходит до тех пор, пока не будет выполняться равенство N30=N31 и состояние реверсивного счетчика будет сохраняться неизменным. В рандомизированном (скремблированном) сигнале КАМ-16, уровень которого соответствует оптимальным порогам принятия решения, указанным в таблице 1, в среднем даже для интервала счета m=16 уже выполняется равенство N30=N31.
В случае же отклонения уровня входного сигнала от оптимального значения в реверсивном счетчике 34 по указанному выше алгоритму формируется код, пропорциональный величине этого рассогласования, который через ЦАП 35 и вторые управляющие входы управляемых усилителей 36 и 37 замыкает петлю автоматической подстройки по уровню входного сигнала.
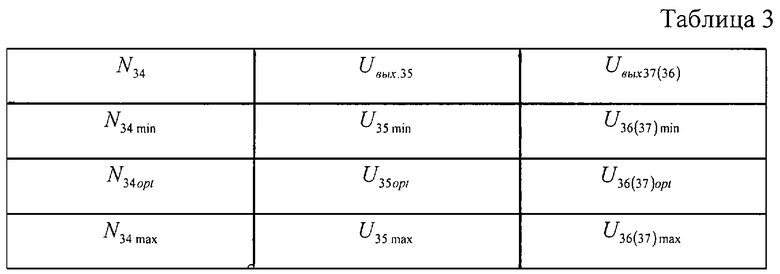
Состояние реверсивного счетчика N34 изменяется от минимального значения N34min через N34opt до максимального значения N34mах.
При этом состояние N34 реверсивного счетчика 34 соответствует выходному напряжению U35 цифроаналогового преобразователя 35 и напряжению на выходах усилителей 36 и 37 следующим образом (см. табл. 3).
Предельные случаи, которые могут возникать в процессе работы блоков 27-35, иллюстрируют фиг.4 и 5.
При этом фиг.4 соответствует предельно малому уровню входного сигнала, при котором в конце каждого интервала счета оказывается N30<<N31 (т.к. все сигнальные точки S1-S16 попадают в заштрихованные косой штриховкой зоны принятия решений).
Фиг. 5 соответствует предельно большому уровню входного сигнала, при котором в конце каждого интервала счета оказывается N30>>N31 (т.к. все сигнальные точки S1-S16 попадают в заштрихованные вертикальной штриховкой зоны принятия решений).
В интервале между данными значениями входного сигнала устройство обеспечивает автоматическое точное поддержание уровня входного сигнала соответствующим оптимальным зонам принятия решений, что повышает помехоустойчивость демодулятора в сравнении с прототипом.
Источники информации
1. Патент РФ 2020767, МКИ 5 H 04 L 27/22, опубл. БИ 18, 30.09.94 г.
2. Тихонов В. И. Статистическая радиотехника. - М.: Радио и связь. - 1982. - 624 с.
3. А.С. 1467786, МКИ 4 H 04 L 27/22, опубл. БИ 11, 23.03.89 г.
4. Пархоменко Н. Г. , Боташев Б.М. Проблемы формирования когерентного опорного колебания в системах связи с квадратурной AM. B сб. "Материалы конференции "Компьютерные методы исследования проблем теории и техники передачи дискретных сигналов по радиоканалам". - Харьков: ХНТО РЭС. - 1990. - С. 87-88.
5. Боташев Б. М. , Пархоменко Н.Г. Оценивание фазы несущего колебания многопозиционных фазоманипулированных сигналов//Вопросы радиоэлектроники. Cер. ОВР. - М.: НИИЭИР, 1991, вып. 17, с. 77-84.
6. А.С. 1062890, МКИ (3) H 04 L 27/22, опубл. БИ 47, 23.12.83 г.
7. А.С. 1501037, МКИ 4 G 06 F 7/02, опубл. БИ 30, 15.08.89 г.
8. А.С. 1383333, МКИ 4 G 06 F 7/02, опубл. БИ 11, 23.03.88 г.
9. А.С. 2019051, МКИ 5 H 04 L 27/22, опубл. БИ 16, 30.08.94 г. - прототип.
Изобретение относится к радиотехнике и может быть использовано при демодуляции сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции. Техническим результатом является повышение помехоустойчивости демодуляции сигналов КАМ-16 за счет поддержания уровня входного сигнала, соответствующим оптимальным зонам принятия решений. Демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции содержит первый и второй фазовые детекторы, первый и второй фильтры нижних частот, первый - десятый компараторы, фазовращатель на 90o, дешифратор, первый - шестой счетчики, блок сравнения. 5 ил., 3 табл.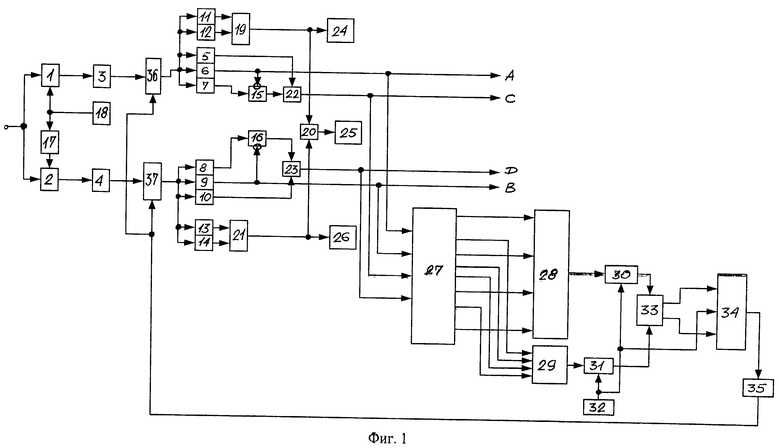
Демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащий блок восстановления несущей, выход которого подключен ко второму входу первого фазового детектора и через фазовращатель на 90o ко второму входу второго фазового детектора, первый вход которого соединен с первым входом первого фазового детектора и является входом демодулятора, выходы первого и второго фазовых детекторов соединены соответственно с входами первого и второго фильтров нижних частот, при этом входы первого, второго, третьего, седьмого и восьмого компараторов соединены, а выходы седьмого и восьмого компараторов соединены с входами первого элемента ИЛИ, выход которого подключен к входу первого счетчика и первому входу второго элемента ИЛИ, выход и второй вход которого соединены соответственно с входом второго счетчика и входом третьего счетчика, который подключен к выходу третьего элемента ИЛИ, входы которого соединены с выходами девятого и десятого компараторов, входы которых соединены с входами четвертого, пятого и шестого компараторов, при этом выходы второго и пятого компараторов являются соответственно первым и вторым выходами демодулятора, выходы первого и третьего компараторов соединены соответственно с первым входом четвертого элемента ИЛИ и прямым входом первого элемента И, инверсный вход и выход которого соединены соответственно с выходом второго компаратора и вторым входом четвертого элемента ИЛИ, выход которого является третьим выходом демодулятора, четвертым выходом которого является выход пятого элемента ИЛИ, входы которого соединены соответственно с выходами шестого компаратора и второго элемента И, к прямому и инверсному входам которого подключены соответственно выходы четвертого и пятого компараторов, отличающийся тем, что в него введены дешифратор, шестой и седьмой элементы ИЛИ, четвертый, пятый и шестой счетчики, блок сравнения, реверсивный счетчик, цифроаналоговый преобразователь и два управляемых усилителя, причем первый, второй, третий и четвертый входы дешифратора подключены соответственно к первому, второму, третьему и четвертому выходам демодулятора, первый, второй, третий и четвертый выходы дешифратора соединены с соответствующими входами шестого элемента ИЛИ, выход которого соединен с первым входом четвертого счетчика, выход которого соединен с первым входом блока сравнения, второй вход которого соединен с выходом пятого счетчика, вход которого соединен с выходом седьмого элемента ИЛИ, входы которого соединены соответственно с пятым, шестым, седьмым и восьмым выходами дешифратора, выход шестого счетчика соединен со вторыми входами четвертого, пятого и реверсивного счетчиков, первый и третий входы реверсивного счетчика соединены соответственно с первым и вторым выходами блока сравнения, выход реверсивного счетчика соединен с входом цифроаналогового преобразователя, выход которого соединен со вторыми входами управляемых усилителей, вход и выход первого управляемого усилителя соединен соответственно с выходом первого фильтра нижних частот и входом первого компаратора, вход и выход второго управляемого усилителя соединены соответственно с выходом второго фильтра нижних частот и входом четвертого компаратора.
| ДЕМОДУЛЯТОР СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 1991 |
|
RU2019051C1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 1990 |
|
RU2020767C1 |
| 1968 |
|
SU415406A1 | |
| US 4546323 А, 08.10.1985. | |||

