Изобретение относится к радиотехнике и может быть использовано при приеме и демодуляции сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции (КАМ-16).
Известен демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащий первый и второй фазовые детекторы, фильтр, генератор, первый и второй ограничители (см. патент РФ №2013018, МПК 5 H 04 L 27/22, опубл. БИ №9, 15.05.94 г.) [1].
Недостатком известного демодулятора является его низкая помехоустойчивость, связанная с наличием точки ложного захвата по фазе на его дискриминационной характеристике в окрестности точки ϕ≈23° (см. [1, фиг.2]). Работа демодулятора в состоянии ложного захвата по фазе, который в известном устройстве не может быть обнаружен и устранен, приводит к полной потере информации на выходе демодулятора.
Известно также устройство восстановления несущей частоты сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащее первый и второй фазовые детекторы, первый и второй фильтры нижних частот, фазовращатель и четыре сумматора (см. патент РФ №2019054, МПК 5 H 04 L 27/34, опубл. в БИ №16, 30.08.94 г.) [2].
Недостаток известного устройства также состоит в его низкой помехоустойчивости, связанной с возможностью полной потери информации из-за наличия ложного захвата по фазе при ϕ≈23° (см. [2, фиг.3]). Вообще, наличие ложных захватов по фазе является принципиальной особенностью приемников и демодуляторов сигналов с амплитудно-фазовой манипуляцией, что объясняется мультимодальностью, т.е. наличием нескольких максимумов, функции правдоподобия при оценке фазы восстановления несущей таких сигналов (см., например, Пархоменко Н.Г., Боташев Б.М., Шеляпин Е.С. Исследование схем восстановления несущей частоты сигналов квадратурной амплитудной манипуляции // Вопросы радииоэлектронники. Сер. ОВР. - М.: НИИЭИР. - 1991. - вып.17, с.65-76) [3].
Для устранения самой возможности ложных захватов в демодуляторах сигналов КАМ-16, в ряде случаев эмпирическим путем синтезируют такие схемы восстановления несущей частоты, которые не имеют точек ложных захватов по фазе на дискриминационной характеристике.
Общим недостатком такого подхода является то, что поскольку такие устройства не соответствуют оптимальным, то есть тем, структура которых вытекает из соответствующей теории оценок начальной фазы ϕ сигнала, то такие устройства имеют высокую дисперсию восстановленной несущей в окрестности рабочей точки ϕ=0°. Это приводит к низкой помехоустойчивости таких устройств.
Известен демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащий два фазовых детектора, фазовращатель, шесть сумматоров и генератор, управляемый напряжением (ГУН) (см. патент РФ №2020767, МПК 5 H 04 L 27/22, опубл. в БИ №18, 30.09.94 г.) [4].
Недостатком известного устройства является его низкая помехоустойчивость, связанная с высокой дисперсией управляющего напряжения на выходе ГУН при ϕ=0°, несмотря на то, что известное устройство имеет дискриминационную характеристику по фазе, вообще не имеющую точек ложных захватов.
Оптимальным сочетанием высокой помехоустойчивости при ϕ=0° и минимумом потерь информации в случае возникновения ложных захватов является использование в оптимальных устройствах, обладающих, тем не менее, нежелательными точками ложных захватов, специальных узлов и блоков, обнаруживающих и устраняющих эти ложные захваты.
Таким устройством является приемник сигналов квадратурной амплитудной манипуляции, содержащий первый и второй фильтры нижних частот, генератор, элемент ИЛИ, фазовращатель (см. патент РФ №2019053, МПК 5 H 04 L 27/34, опубл. в БИ №16, 30.08.94 г.) [5], в котором предусмотрены специальные узлы и блоки для обнаружения и устранения ложных захватов.
Недостатком известного устройства является низкая надежность обнаружения ложного захвата и, как следствие этого, низкая помехоустойчивость. Это связано с тем, что принцип обнаружения ложных захватов в известном устройстве основан на допущении о том, что при определенных значениях угла фазового рассогласования ϕ в некоторую выделенную область принятия решения о переданном символе не попадает ни одна сигнальная точка.
Данное допущение верно лишь при нереально больших отношениях сигнал/шум на входе устройства.
При реальных же отношениях сигнал/шум на входе устройства, порядка 20÷25 дБ, такое допущение является не всегда корректным. В связи с этим, в известном устройстве при реальных рабочих отношениях сигнал/шум на входе, величины напряжений, соответствующие наличию или отсутствию ложного захвата в известном устройстве, различаются незначительно. Таким образом, при воздействии шума в известном устройстве высока вероятность не обнаружения ложного захвата или его ошибочной идентификации и устранения, когда на самом деле захват был истинным.
Из известных технических решений наиболее близким по технической сущности к заявляемому устройству является приемник сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащий первый и второй фильтры нижних частот, десять компараторов, первый и второй элементы И, фазовращатель на 90°, блок восстановления несущей, шесть элементов ИЛИ, четыре счетчика, первый и второй блоки сравнения, регистр и первый и второй фазовые детекторы, первые входы которых соединены и являются входом устройства, второй вход первого фазового детектора соединен с входом фазовращателя на 90°, выход которого соединен с вторым входом второго фазового детектора, выходы первого и второго фазовых детекторов соединены соответственно с входами первого и второго фильтров нижних частот, выходы первого и второго фильтров нижних частот соединены соответственно со входами первого и четвертого компараторов, входы первого, второго, третьего, седьмого и восьмого компараторов соединены, а выходы седьмого и восьмого компараторов соединены с входами первого элемента ИЛИ, выход которого подключен к входу первого счетчика и первому входу второго элемента ИЛИ, выход и второй вход которого соединены соответственно с входом второго счетчика и входом третьего счетчика, вход третьего счетчика подключен к выходу третьего элемента ИЛИ, входы которого соединены с выходами девятого и десятого компараторов, входы которых соединены с входами четвертого, пятого и шестого компараторов, при этом выходы второго и пятого компараторов являются соответственно первым и вторым выходами устройства, выходы первого и третьего компараторов соединены соответственно с первым входом четвертого элемента ИЛИ и прямым входом первого элемента И, инверсный вход и выход которого соединены соответственно с выходом второго компаратора и вторым входом четвертого элемента ИЛИ, выход которого является третьим выходом устройства, четвертым выходом которого является выход пятого элемента ИЛИ, входы которого соединены соответственно с выходами шестого компаратора и второго элемента И, к прямому и инверсному входам которого подключены соответственно выходы четвертого и пятого компараторов, вторые входы первого и второго блоков сравнения соединены с выходом регистра, выходы первого и второго блоков сравнения соединены со входами шестого элемента ИЛИ, выход четвертого счетчика соединен со входами сброса первого, второго и третьего счетчиков (см. патент РФ №2235440, МПК 7 H 04 L 27/22, опубл. в БИ №24, 27.08.04 г.) [6] - прототип.
В известном устройстве происходит надежное обнаружение ложных захватов за счет использования свойства кардинального отличия в состояниях третьего счетчика при истинном и ложном захватах по фазе.
При этом устранение обнаруженного ложного захвата по фазе сводится к запуску генератора свип-сигнала, который выводит блок восстановления несущей из состояния ложного захвата путем воздействия пилообразного напряжения.
Поскольку при новом вхождении блока восстановления несущей в синхронизм в известном устройстве не используются такие операции над сигналом, которые бы гарантированно избавляли от повторного ложного захвата, то в известном устройстве существует высокая вероятность повторного ложного захвата (а также третьего, четвертого и т.д.) даже после обнаружения и устранения первоначального ложного захвата по фазе.
При кратких сеансах связи такой длительный цикл поиска состояния истинного захвата является недопустимым, поскольку в режиме работы генератора свип-сигнала теряется вся информация на выходе приемника.
Таким образом, недостатком известного устройства является его низкая помехоустойчивость, обусловленная низкой надежностью устранения ложных захватов или, что то же самое, большим временем устранения ложных захватов.
Технический результат - повышение помехоустойчивости приемника сигналов КАМ-16 за счет повышения надежности и уменьшения времени устранения ложных захватов по фазе достигается выполнением следующих операций над сигналом:
- восстанавливают когерентную несущую частоту сигнала КАМ-16;
- для каждой демодулированной сигнальной точки сигнала КАМ-16 определяют величины проекций этой точки на квадратурные оси, образованные восстановленной когерентной несущей частотой;
- в зависимости от величин проекций каждой сигнальной точки на квадратурные оси принимают решение о принятой тетраде информационных символов {ABCD} и передают ее на выход демодулятора;
- для каждой сигнальной точки определяют, выходит ли за предельные величины значения проекций каждой сигнальной точки по каждой сигнальной оси;
- устанавливают циклически повторяющийся интервал счета m тактов;
- в случае, если значение проекции сигнальной точки выходит за предельные величины (т.е. U<-2 или U>2), то раздельно по каждой из квадратурных осей подсчитывают количества таких сигнальных точек за интервал счета m тактов;
- подсчитывают суммарное по двум квадратурным осям количества таких сигнальных точек за интервал счета m тактов;
- по раздельно и суммарно по двум осям подсчитанным количествам сигнальных точек, проекции которых на квадратурные оси выходят за предельные величины (U<-2 или U>2), оценивают вероятность ошибки на выходе демодулятора;
- определяют знак по синфазной (квадратурной) оси проекций тех сигнальных точек, которые выходят за предельные величины (U<-2 или U>2) по квадратурной (синфазной) оси и подсчитывают их количества N-ϕ и N+ϕ;
- сравнивают раздельно подсчитанные по каждой из квадратурных осей количества сигнальных точек N-ϕ и N+ϕ с предельной величиной Nпр.;
- в случае превышения любой из подсчитанных величин N-ϕ и N+ϕ предельной величины Nпр., делают вывод о произошедшем ложном захвате и о значении угла фазовой ошибки (-23° или +23°);
- на основании вычисленного значения угла фазовой ошибки (ϕлз=+23° или ϕлз=-23°) в блоке компенсации фазовой ошибки коммутируют такой фазовращатель в цепи восстановленной несущей (-23° или +23°), который компенсирует фазовую ошибку ложного захвата, т.е. устраняет ложный захват.
Это достигается тем, что приемник сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции содержит первый и второй фильтры нижних частот, десять компараторов, первый и второй элементы И, фазовращатель на 90°, блок восстановления несущей, шесть элементов ИЛИ, четыре счетчика, первый и второй блоки сравнения, регистр и первый и второй фазовые детекторы, первые входы которых соединены и являются входом устройства. Второй вход первого фазового детектора соединен с входом фазовращателя на 90°, выход которого соединен с вторым входом второго фазового детектора, выходы первого и второго фазовых детекторов соединены соответственно с входами первого и второго фильтров нижних частот, выходы первого и второго фильтров нижних частот соединены соответственно со входами первого и четвертого компараторов. Входы первого, второго, третьего, седьмого и восьмого компараторов соединены, а выходы седьмого и восьмого компараторов соединены с входами первого элемента ИЛИ, выход которого подключен к входу первого счетчика и первому входу второго элемента ИЛИ, выход и второй вход которого соединены соответственно с входом второго счетчика и входом третьего счетчика. Вход третьего счетчика подключен к выходу третьего элемента ИЛИ, входы которого соединены с выходами девятого и десятого компараторов, входы которых соединены с входами четвертого, пятого и шестого компараторов, при этом выходы второго и пятого компараторов являются соответственно первым и вторым выходами устройства. Выходы первого и третьего компараторов соединены соответственно с первым входом четвертого элемента ИЛИ и прямым входом первого элемента И, инверсный вход и выход которого соединены соответственно с выходом второго компаратора и вторым входом четвертого элемента ИЛИ, выход которого является третьим выходом устройства, четвертым выходом которого является выход пятого элемента ИЛИ, входы которого соединены соответственно с выходами шестого компаратора и второго элемента И, к прямому и инверсному входам которого подключены соответственно выходы четвертого и пятого компараторов. Вторые входы первого и второго блоков сравнения соединены с выходом регистра, выходы первого и второго блоков сравнения соединены со входами шестого элемента ИЛИ, выход четвертого счетчика соединен со входами сброса первого, второго и третьего счетчиков.
Согласно изобретению в него введены третий, четвертый, пятый и шестой элементы И, седьмой и восьмой элементы ИЛИ, пятый и шестой счетчики и блок компенсации фазовой ошибки, причем выходы седьмого, восьмого, девятого и десятого компараторов соединены соответственно с первыми входами третьего, четвертого, пятого и шестого элементов И, вторые входы третьего и четвертого элементов И соединены с выходом пятого компаратора, вторые входы пятого и шестого элементов И соединены с выходом второго компаратора. Первые и вторые входы четвертого и шестого элементов И являются инверсными, выходы третьего и четвертого элементов И соединены соответственно с первым и вторым входами седьмого элемента ИЛИ, выход которого соединен с входом пятого счетчика, выход которого соединен с первым входом первого блока сравнения. Выходы пятого и шестого элементов И соединены соответственно с первым и вторым входами восьмого элемента ИЛИ, выход которого соединен с входом шестого счетчика, выход которого соединен с первым входом второго блока сравнения, пятый вход блока компенсации фазовой ошибки является управляющим входом устройства. Первый, второй, третий и четвертый входы блока компенсации фазовой ошибки соединены соответственно с выходом первого блока сравнения, выходом второго блока сравнения, выходом шестого элемента ИЛИ и выходом блока восстановления несущей, вход которого соединен со входом устройства. Выход четвертого счетчика соединен со входами сброса пятого и шестого счетчиков.
Другое отличие состоит в том, что блок компенсации фазовой ошибки содержит три триггера, два фазовращателя, три коммутатора, инвертор и сумматор, выход которого является выходом блока компенсации фазовой ошибки, первые входы первого, второго и третьего триггеров соединены соответственно с первым, вторым и третьим входами блока компенсации фазовой ошибки, четвертый вход которого соединен со входами первого и второго фазовращателей и вторым входом третьего коммутатора, выходы первого и второго фазовращателей соединены соответственно со вторыми входами первого и второго коммутаторов, первые входы которых соединены соответственно с выходами первого и второго триггеров, выход третьего триггера через инвертор соединен с первым входом третьего коммутатора, выходы первого, второго и третьего коммутаторов соединены соответственно с первым, вторым и третьим входами сумматора, вторые входы первого, второго и третьего триггеров являются пятым входом блока компенсации фазовой ошибки.
Новые узлы и блоки позволяют выполнить новые операции над сигналами: подсчитывать за интервал счета m тактов количества тех сигнальных точек, которые позволяют определить величину фазового рассогласования в случае произошедшего ложного захвата (+23° или -23°).
В том случае, если в устройстве идентифицирован ложный захват, то в зависимости от установленного вида ложного захвата (т.е. величине фазового рассогласования) в блоке компенсации фазовой ошибки (БКФО) подсоединяется (коммутируется) такой фазовращатель в цепи восстановленной несущей, который позволяет устранить этот ложный захват.
При этом, в отличие от прототипа, в заявляемом устройстве используется беспоисковый алгоритм устранения ложного захвата, основанный не на срыве синхронизации блока восстановления несущей, а на компенсации вычисленного угла фазовой ошибки.
Это повышает помехоустойчивость заявляемого устройства, поскольку позволяет надежно устранять ложный захват, причем за минимально возможное время.
На фиг.1 приведена функциональная схема демодулятора сигналов КАМ-16.
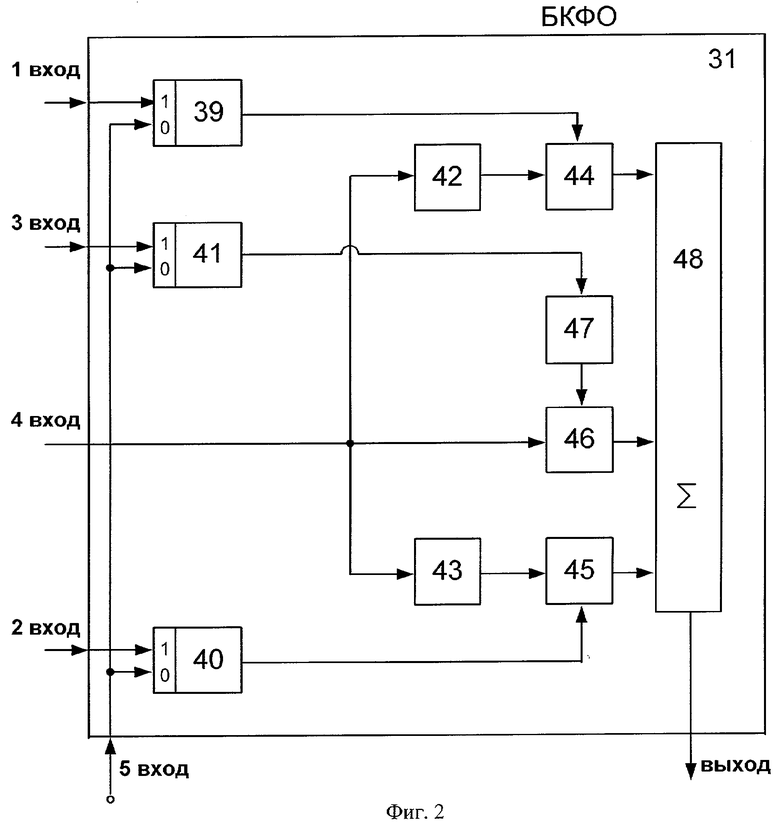
На фиг.2 приведена функциональная схема БКФО.
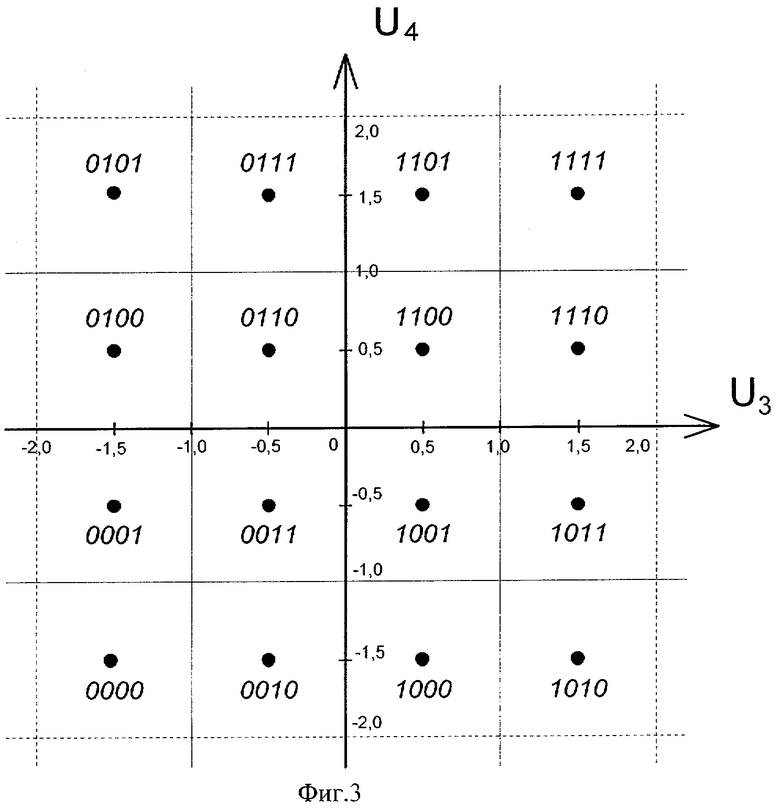
На фиг.3 приведены сигнальные точки ансамбля КАМ-16 и соответствующие им оптимальные зоны принятия решений, где символами U3 и U4 обозначены квадратурные сигнальные оси, образованные восстановленной когерентной несущей частотой.
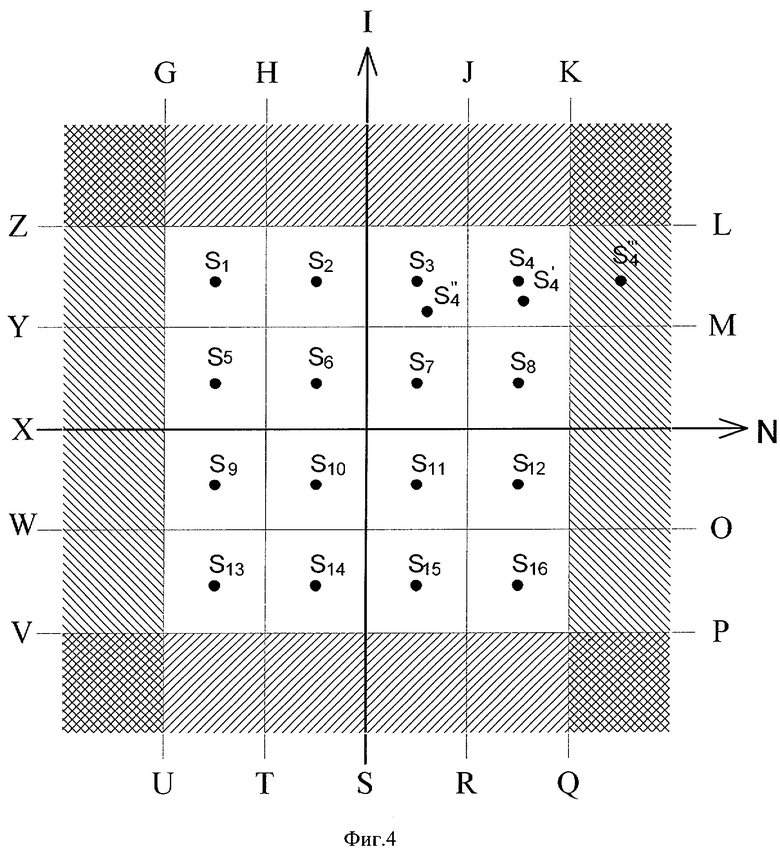
Фиг.4 иллюстрирует принцип измерения вероятности ошибки на выходе демодулятора, где символами S1-S16 обозначены сигнальные точки ансамбля КАМ-16.
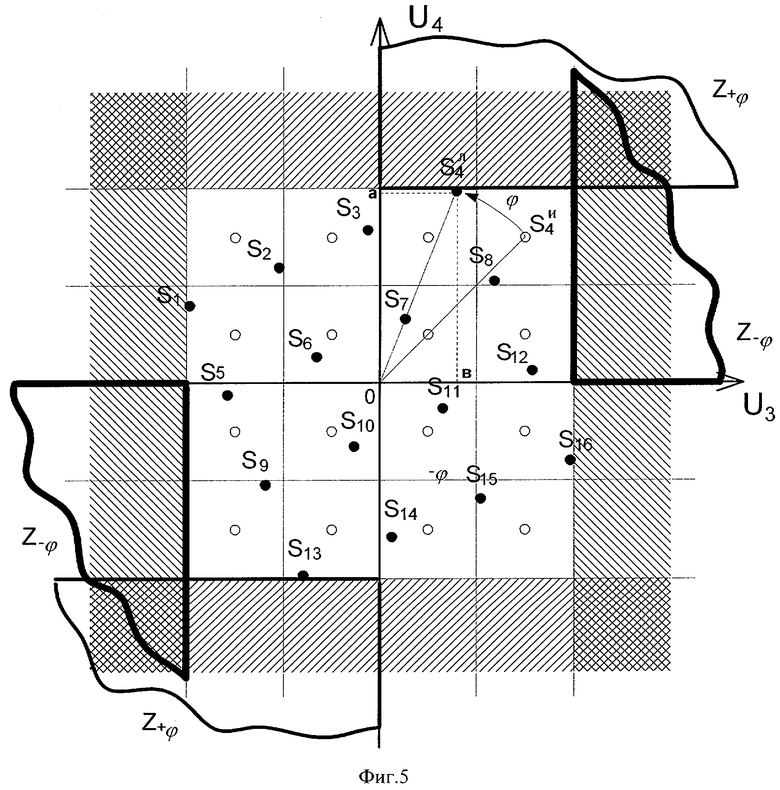
Фиг.5 иллюстрирует принцип обнаружения и устранения ложных захватов, где белые точки соответствуют истинному захвату, а черные - ложному для случая ϕлз=+23°.
В табл.1 приведены пороги срабатывания компараторов.
Приемник сигналов КАМ-16 содержит первый, второй фазовые детекторы 1, 2, первый, второй фильтры 3, 4 нижних частот, первый-десятый компараторы 5-14, первый, второй элементы И 15, 16, фазовращатель 17 на 90°, блок 18 восстановления несущей, первый-пятый элементы ИЛИ 19-23, первый, второй, третий счетчики 24-26, первый блок 27 сравнения, второй блок 28 сравнения, регистр 29, шестой элемент ИЛИ 30, бок 31 компенсации фазовой ошибки, четвертый счетчик 32, третий-шестой элементы И 33-36, седьмой и восьмой элементы ИЛИ 37, 38.
Блок 31 компенсации фазовой ошибки содержит первый-третий триггеры 39-41, первый и второй фазовращатели 42, 43, первый-третий коммутаторы 44-46, инвертор 47 и сумматор 48.
Устройство содержит пятый и шестой счетчики 49, 50.
Первые входы первого и второго фазовых детекторов 1 и 2 соединены и являются входом устройства, второй вход первого фазового детектора 1 соединен с входом фазовращателя 17 на 90°, выход которого соединен с вторым входом второго фазового детектора 2, выходы первого и второго фазовых детекторов 1 и 2 соединены соответственно с входами первого и второго фильтров нижних частот 3 и 4. Выходы первого и второго фильтров нижних частот 3 и 4 соединены соответственно со входами первого и четвертого компараторов 5 и 8, входы первого, второго, третьего, седьмого и восьмого компараторов 5, 6, 7, 11, 12 соединены, а выходы седьмого и восьмого компараторов 11 и 12 соединены с входами первого элемента ИЛИ 19, выход которого подключен к входу первого счетчика 24 и первому входу второго элемента ИЛИ 20, выход и второй вход которого соединены соответственно с входом второго счетчика 25 и входом третьего счетчика 26. Вход третьего счетчика 26 подключен к выходу третьего элемента ИЛИ 21, входы которого соединены с выходами девятого и десятого компараторов 5 и 6, входы которых соединены с входами четвертого, пятого и шестого компараторов 8, 9, 10, при этом выходы второго и пятого компараторов 6 и 9 являются соответственно первым и вторым выходами устройства, выходы первого и третьего компараторов 5 и 7 соединены соответственно с первым входом четвертого элемента ИЛИ 22 и прямым входом первого элемента И 15, инверсный вход и выход которого соединены соответственно с выходом второго компаратора 6 и вторым входом четвертого элемента ИЛИ 22, выход которого является третьим выходом устройства, четвертым выходом которого является выход пятого элемента ИЛИ 23, входы которого соединены соответственно с выходами шестого компаратора 10 и второго элемента И 16, к прямому и инверсному входам которого подключены соответственно выходы четвертого и пятого компараторов 8 и 9, вторые входы первого и второго блоков сравнения 27 и 28 соединены с выходом регистра 29. Выходы первого и второго блоков сравнения 27 и 28 соединены со входами шестого элемента ИЛИ 30, выход четвертого счетчика 32 соединен со входами сброса первого, второго, третьего, пятого и шестого счетчиков 24, 25, 26, 49, 50. Выходы седьмого, восьмого, девятого и десятого компараторов 11, 12, 13 и 14 соединены соответственно с первыми входами третьего, четвертого, пятого и шестого элементов И 33, 34, 35, 36, вторые входы третьего и четвертого элементов И 33, 34 соединены с выходом пятого компаратора 9, вторые входы пятого и шестого элементов И 35, 36 соединены с выходом второго компаратора 6, первые и вторые входы четвертого и шестого элементов И 34, 36 являются инверсными. Выходы третьего и четвертого элементов И 33, 34 соединены соответственно с первым и вторым входами седьмого элемента ИЛИ 37, выход которого соединен с входом пятого счетчика 49, выход которого соединен с первым входом первого блока сравнения 27, выходы пятого и шестого элементов И 35, 36 соединены соответственно с первым и вторым входами восьмого элемента ИЛИ 38, выход которого соединен с входом шестого счетчика 50, выход которого соединен с первым входом второго блока сравнения 28. Пятый вход блока компенсации фазовой ошибки 31 является управляющим входом устройства, первый, второй, третий и четвертый входы блока компенсации фазовой ошибки 31 соединены соответственно с выходом первого блока сравнения 27, выходом второго блока сравнения 28, выходом шестого элемента ИЛИ 30 и выходом блока восстановления несущей 18, вход которого соединен со входом устройства.
В блоке компенсации фазовой ошибки 31 выход сумматора 48 является выходом блока компенсации фазовой ошибки 31, первые входы первого, второго и третьего триггеров 39, 40, 41 соединены соответственно с первым, вторым и третьим входами блока компенсации фазовой ошибки 31, четвертый вход которого соединен со входами первого и второго фазовращателей 42, 43 и вторым входом третьего коммутатора 46, выходы первого и второго фазовращателей 42, 43 соединены соответственно со вторыми входами первого и второго коммутаторов 44, 45, первые входы которых соединены соответственно с выходами первого и второго триггеров 39, 40, выход третьего триггера 41 через инвертор 47 соединен с первым входом третьего коммутатора 46, выходы первого, второго и третьего коммутаторов 44, 45, 46 соединены соответственно с первым, вторым и третьим входами сумматора 48, вторые входы первого, второго и третьего триггеров 39, 40, 41 являются пятым входом блока компенсации фазовой ошибки 31.
Триггеры 39-40 в БКФО 31 являются RS-триггерами, при этом появление логической единицы на их первых входах приводит к ее защелкиванию (фиксации) на их выходах. Вторые входы триггеров являются входами сброса в нулевое состояние.
Первый и второй фазовращатели 42 и 43 осуществляют поворот на угол соответственно +23° и -23°.
Коммутаторы 44, 45 и 46 выполнены как управляемые ключи: при наличии единицы на их первом (управляющем) входе они передают сигнал со своего второго входа на выход (ключ замкнут), в противном случае (ноль на первом управляющем входе) на выход сигнал не поступает (ключ разомкнут).
Устройство работает следующим образом. В начальный момент времени на пятый вход блока 31 (см. фиг.1) подается импульс, переводящий триггеры 39-41 (см. фиг.2) в нулевое положение. В соответствии с этим коммутатор 46 соединяет выход блока 18 через сумматор 48 со вторыми входами ФД 1 и 2. Пусть на вход демодулятора поступает сигнал КАМ-16 в виде:

где А, В, С, D - выбираемые из множества /-1; +1/ информационные символы:
w0 - несущая частота сигнала.
Представление сигнала КАМ-16 в виде (1) хорошо согласуется с суперпозиционным принципом формирования сигнала КАМ-16.
Между передаваемыми информационными символами /-1; +1/ в каждом разряде квадруплета ABCD и битами тетрады битов при каждой сигнальной точке ансамбля КАМ-16 существует простое соответствие: символ -1 соответствует биту 0, а символ +1 соответствует биту 1.
Из этого следует, что в тетраде битов, приписанных каждой сигнальной точке ансамбля КАМ-16 на фиг.3, первый бит соответствует символу А, второй - В, третий - С и четвертый - D. Так, тетрада 0101 означает передачу следующих символов: А=-1, B=+1, С=-1, D=+1.
Обозначим напряжение на выходе фильтра 3 как U3, напряжение на выходе фильтра 4 как U4 (фиг.3). Данные напряжения U3 и U4 представляют собой проекции сигнальных точек соответственно на синфазную и квадратурную оси.
На выходе любого из компараторов формируется логическая 1, если уровень на его входе превышает порог срабатывания (и наоборот).
Пороги срабатывания компараторов приведены в таблице 1.
Из сопоставления расположения сигнальных точек ансамбля КАМ-16 и зон принятия решения на фиг.3 следует то, что на выходе компаратора 6 формируется символ А, на выходе компаратора 9 - символ В.
Образование символа С происходит по правилу:

где Е и F - двоичные данные на выходе компараторов 5 и 7 соответственно;
+ - символ булевской операции сложения (ИЛИ).
Образование символа D происходит по аналогичному правилу.
При этом блоки 15, 22 и 16, 23 формируют уравнение вида (2) для определения символов С и D соответственно.
Рассмотрим, каким образом происходит восстановление данных при приеме, например, сигнальной точки S8 (см. фиг.4). При приеме сигнальной точки S8 на выходах ФНЧ 3 и ФНЧ 4 напряжения будут таковы, что срабатывают компараторы 6 и 9 с нулевыми порогами и на первом выходе демодулятора появится бит 1 (А=+1), на втором выходе появится бит 1 (В=+1). Поскольку компаратор 5 также сработает (ибо напряжение U3 превышает пороговую для компаратора 5 величину +1), то через элемент ИЛИ 22 на третьем выходе демодулятора появится бит 1 (С=+1).
Компаратор 10 не сработает, ибо U4 не превышает пороговой для компаратора величины 1. Компаратор 8 срабатывает, так как порог составляет - 1, но элемент И 16 будет закрыт по инверсному входу сигналом с выхода компаратора 9 и в итоге на выходе элемента ИЛИ 23 будет сформирован бит 0 (D=-1). Данный набор битов 1110 полностью соответствует коду на фиг.2 для точки S8 (фиг.4).
При передаче любой сигнальной точки S1-S16 логика работы компараторов 5-14, элементов И 15, 16 и элементов ИЛИ 22, 23 такова, что всегда на первом выходе устройства будет формироваться символ А, на втором выходе - символ В, на третьем - символ С, на четвертом - D (см. фиг.1) в соответствии с выбранным манипуляционным кодом (см. фиг.3).
Рассмотрим, каким образом происходит измерение вероятности ошибки на выходе устройства.
Поскольку заявляемый приемник принимает решения по критерию идеального наблюдателя, то ошибки при приеме сигналов ансамбля КАМ-16 происходят только тогда, когда передаваемая сигнальная точка под воздействием шума попадает на сигнальной плоскости в зону принятия решения, соответствующей другой сигнальной точке. Так, при приеме символа  (см. фиг.4) приемник выносит решение в пользу ближайшей разрешенной сигнальной точки S4, и ошибки не происходит. Если же под воздействием шума передаваемая точка занимает место
(см. фиг.4) приемник выносит решение в пользу ближайшей разрешенной сигнальной точки S4, и ошибки не происходит. Если же под воздействием шума передаваемая точка занимает место  , т.е. попадает в зону решения другой сигнальной точки, то решение выносится в пользу точки S3 (см. фиг.4), и на выходе устройства возникает ошибка в символе.
, т.е. попадает в зону решения другой сигнальной точки, то решение выносится в пользу точки S3 (см. фиг.4), и на выходе устройства возникает ошибка в символе.
Факт такой ошибки при приеме полностью случайного информационного сигнала (не имеющего корреляционной связи между символами) никаким образом не может быть обнаружен. Однако, если положить, что вероятностью пересечения векторного шума более чем одной границы на решающей сети (фиг.4) можно пренебречь, что всегда выполняется на практике, то, в этом случае, наблюдая за попаданием точек в дополнительные зоны, можно измерять вероятность ошибок.
Действительно, пребывание точки  заштрихованной зоне не приводит к возникновению ошибки, поскольку решение выносится в пользу истинной точки
заштрихованной зоне не приводит к возникновению ошибки, поскольку решение выносится в пользу истинной точки  , однако при этом можно составить представление о действующем на входе векторе шума
, однако при этом можно составить представление о действующем на входе векторе шума  , который при передаче любой из точек S1-S3, S5-S7, S9-S11, S13-S15 привел бы к возникновению ошибки.
, который при передаче любой из точек S1-S3, S5-S7, S9-S11, S13-S15 привел бы к возникновению ошибки.
Измерение вероятности ошибки в заявляемом устройстве происходит следующим образом.
Вероятность PGU пребывания точки в левой полуплоскости, ограниченной прямой (GU), определяется по формуле:

где PS1=PS5=PS9=PS13 - априорные вероятности передачи сигнальных точек S1, S5, S9, S13;
Pш - вероятность того, что шум уведет передаваемую точку влево за границу GU.
Поскольку все сигнальные точки ансамбля КАМ-16 передаются с одинаковой вероятностью, равной 1/16, то формулу 3 можно преобразовать к виду:
Поскольку шум "уводит" сигнальные точки от их истинного положения в соседние зоны принятия решения с одинаковой вероятностью (канал симметричен), то

где Pош - вероятность ошибки на выходе демодулятора.
Подставляя выражение (5) в выражение (4), имеем:
Аналогично этому, вероятность пребывания точки в правой полуплоскости, ограниченной прямой KQ, есть

Поскольку события, заключающиеся в нахождении сигнальной точки слева от прямой GU или справа от прямой KQ, несовместимы, то вероятность того, что произойдет любое из этих событий, есть сумма вероятностей, определяемых формулами (4) и (7)

Факт появления сигнальной точки слева от прямой GU определяется по срабатыванию компаратора 12 с порогом срабатывания -2. Факт появления сигнальной точки справа от прямой KQ определяется по срабатыванию компаратора 11 с порогом срабатывания +2. Прямые GU и KQ пересекают ось абсцисс на фиг.3 именно в точках -2 и +2. Значит, объединяя через элемент ИЛИ 19 выходы компараторов 11 и 12, можно измерять вероятность ошибки в символе по данному квадратурному каналу (по оси U3 на фиг.3).
Поток импульсов с выхода элемента ИЛИ 19 поступает на счетчик 24. Умножая на коэффициент, равный 8, показания счетчика 24 в соответствии с формулой (8), можно определить вероятность ошибки в символах А и С на выходе демодулятора.
Аналогично этому, вероятность ошибки в символах В и D можно определить по показаниям счетчика 26 (также через коэффициент, равный 8).
Итоговую вероятность по всем символам А, В, С, D ошибки можно определить по показаниям счетчика 25, умножая их на 4.
При этом вероятность ошибки определяется так:

где Рош - вероятность ошибки на выходе демодулятора;
N25 - показания счетчика 25;
m - длительность интервала счета в тактах.
Интервал счета m тактов, определяемый четвертым счетчиком 32, выбирается по различным соображениям, равным m=(103÷1012)·16. В конце каждого интервала счета счетчик 32 сбрасывает (обнуляет) состояния счетчиков 24-26 через их входы сброса.
Рассмотрим, каким образом происходит обнаружение ложного захвата в заявляемом приемнике. Обнаружение ложного захвата в заявляемом устройстве основано на том положении, что показания счетчиков 24 и 26, а также 49 и 50, в состоянии истинного и ложного захватов, различаются принципиальным образом:
- в состоянии истинного захвата показания, например, третьего счетчика 26, пропорциональны величине 
- в состоянии ложного захвата показания того же счетчика 26 пропорциональны величине  .
.
Из этого следует, что при корректно выбранном интервале счета m и реальном отношении сигнал/шум на входе устройства величины  и
и  различаются кардинально (на несколько порядков).
различаются кардинально (на несколько порядков).
Пусть, например, отношение сигнал/шум на входе устройства составляет порядка 16 дБ и, соответственно, Рош≈10-5. Пусть m=16·105.
Тогда в состоянии истинного захвата
В состоянии ложного захвата

Покажем, что при любом отношении сигнал/шум в состоянии истинного и ложного захватов показания третьего счетчика 26 (как и первого счетчика 24) отличаются на несколько порядков, что дает возможность по значениям N26 (и N24) достоверно судить о произошедшем ложном захвате.
При ложном захвате с ошибкой по фазе ϕлз=23°, все точки ансамбля КАМ-16 в квадратурных осях U3 и U4 занимают новые положения (см. фиг.5). При этом, например, точка  переходит в точку
переходит в точку  . Рассмотрим, как уменьшается при этом проекция точки S4 на ось U4.
. Рассмотрим, как уменьшается при этом проекция точки S4 на ось U4.
В состоянии истинного захвата проекция точки  на ось U4 составляет U4=1,5.
на ось U4 составляет U4=1,5.
В состоянии ложного захвата проекция точки  на ось U4 может быть найдена из следующих геометрических соображений:
на ось U4 может быть найдена из следующих геометрических соображений:

Отсюда получаем, что U4=1,95.
Таким образом, в состоянии истинного захвата расстояние от точки  до границы U=2 составляет величину 2-1,5=0,5; в состоянии ложного захвата расстояние от точки
до границы U=2 составляет величину 2-1,5=0,5; в состоянии ложного захвата расстояние от точки  до границы U=2 уменьшается до величины 2-1,95=0,05. Такое уменьшение расстояния до границы срабатывания компараторов эквивалентно ухудшению отношения сигнал/шум (при оценке вероятности ошибки) на величину
до границы U=2 уменьшается до величины 2-1,95=0,05. Такое уменьшение расстояния до границы срабатывания компараторов эквивалентно ухудшению отношения сигнал/шум (при оценке вероятности ошибки) на величину  .
.
Зависимость же вероятности ошибки от отношения сигнал/шум для сигнала КАМ-16 (см., например, Феер К. Беспроводная цифровая связь. - М.: Радио и связь, 2000. - с. 237. - рис.5.2.16) [7], такова, что при реальных рабочих отношениях сигнал/шум на входе (порядка 20 дБ) Pош составляет величину менее 10-5; ухудшение отношения сигнал/шум на 20 дБ дает величину Рош более 10-1. Соответственно этому, и показания третьего счетчика N26 в двух случаях также будут различаться на несколько порядков, что и дает возможность надежно идентифицировать тип захвата (истинный или ложный).
Все приведенные выше положения справедливы как для других крайних диагональных точек (S1; S13; S16),так и для первого счетчика 24.
Аналогичные рассуждения справедливы для счетчиков 49 и 50, состояния которых и сравниваются с пороговой величиной Nпр.. Использование в заявляемом устройстве специальных сигналов, то есть состояний счетчиков, значения которых резко контрастны по отношению к типу захвата по фазе (истинный или ложный), позволяет надежно идентифицировать ложные захваты.
Рассмотрим, каким образом в заявляемом устройстве определяется значение угла фазовой ошибки ϕлз после того, как установлен собственно факт ложного захвата.
Из фиг.5 видно, что если на сигнальной плоскости сформировать зоны, обозначенные как Z+ϕ и Z-ϕ, то по вероятности попадания сигнальных точек в такие зоны можно судить о значении фазовой ошибки в режиме ложного захвата.
Действительно аномальная (выше пороговой) вероятность попадания сигнальных точек в зону Z+ϕ свидетельствует о произошедшем ложном захвате с фазовой ошибкой ϕлз=+23° (для зоны Z-ϕ - соответственно ϕлз=-23°).
В соответствии с логикой работы блоков 33-38 подсчет сигнальных точек, попадающих в зону Z+ϕ, происходит в счетчике 50, а попадающих в зону Z-ϕ - в счетчике 49.
На выходе первого блока сравнения 27 логическая единица формируется тогда, когда N49〉Nпр. Аналогично работает второй блок сравнения 28.
В соответствии с этим, наличие единицы на выходе шестого элемента ИЛИ 30 свидетельствует о произошедшем ложном захвате, а уровни сигналов на выходах блоков 27 и 28 позволяют конкретизировать (установить) величину фазовой ошибки в случае ложного захвата.
Единица на выходе блока 27 (28) свидетельствует о наличии ложного захвата с ошибкой по фазе ϕлз=-23° (ϕлз=+23°).
Пусть, как это показано на фиг.5, произошел ложный захват с ϕлз=+23°.
Тогда в зону Z+ϕ за интервал счета будет попадать количество точек, превышающее Nпр, втором и третьем входах БКФО 31, возникнет логическая единица.
Она будет защелкнута триггерами 41 и 40. Коммутатор 46 будет разомкнут, а коммутатор 45 - замкнут и, таким образом, в цепь восстановленной несущей частоты включится дополнительный фазовращатель 43 с фазовым сдвигом ϕ=-23°, что приведет к компенсации угла ложного захвата, то есть к его устранению.
Используемая в заявляемом устройстве беспоисковая процедура устранения ложных захватов, не приводящая к принудительному срыву синхронизации и повторному входу в синхронизм, повышает надежность устранения ложных захватов и уменьшает время их устранения в сравнении с прототипом.
Источники информации
1. Патент РФ №2013018, МПК 5 H 04 L 27/22, опубл. БИ №9, 15.05.94 г.
2. Патент РФ №2019054, МПК 5 H 04 L 27/34, опубл. в БИ №16, 30.08.94 г.
3. Пархоменко Н.Г., Боташев Б.М., Шеляпин Е.С. Исследование схем восстановления несущей частоты сигналов квадратурной амплитудной манипуляции // Вопросы радиоэлектроники. Сер. ОВР. - М.: НИИЭИР. - 1991. - вып.17, с.65-76.
4. Патент РФ №2020767, МПК 5 H 04 L 27/22, опубл. в БИ №18, 30.09.94 г.
5. Патент РФ №2019053, МПК 5 H 04 L 27/34, опубл. в БИ №16, 30.08.94 г.
6. Патент РФ №2235440, МПК 7 H 04 L 27/22, опубл. в БИ №24, 27.08.04 г. - прототип.
7. Феер К. Беспроводная цифровая связь. - М.: Радио и связь, 2000. - с.237. - рис.5.2.16.
Приемник сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции
Изобретение относится к радиотехнике и может быть использовано при приеме и демодуляции сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции (КАМ-16). Технический результат заключается в повышении помехоустойчивости приема сигналов КАМ-16. Для этого в известный демодулятор сигналов шеснадцатипозиционной квадратурной амплитудной манипуляции вводят пятый, шестой счетчик и блок компенсации фазовой ошибки, эти блоки позволяют выполнить следующие новые операции над сигналом: подсчет за интервал счета таких сигнальных точек, количество которых позволяет определить фазовую ошибку произошедшего ложного захвата; компенсацию вычисленной фазовой ошибки в блоке компенсации фазовой ошибки. 1 з.п. ф-лы, 1 табл, 5 ил.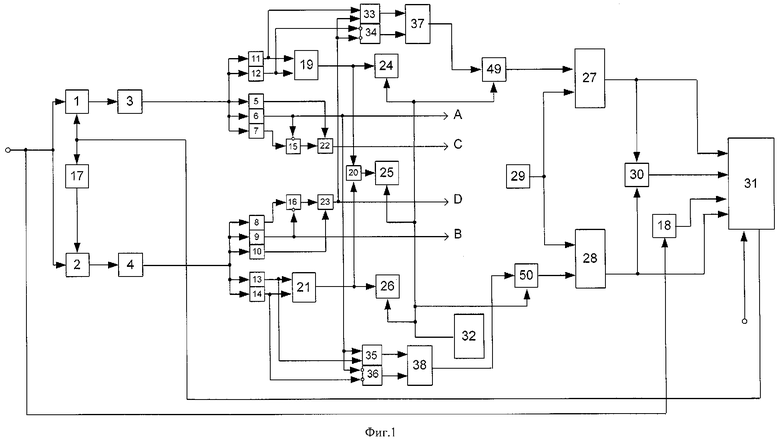
| ДЕМОДУЛЯТОР СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 2002 |
|
RU2235440C1 |
| ПРИЕМНИК СИГНАЛОВ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 1990 |
|
RU2019053C1 |
| ДЕМОДУЛЯТОР СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 1990 |
|
RU2020767C1 |
| УСТРОЙСТВО ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ СИГНАЛОВ ШЕСТНАДЦАТИПОЗИЦИОННОЙ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 1991 |
|
RU2019054C1 |

