Изобретение относится к точному машиностроению, станкостроению, приборостроению, в частности там, где требуется достаточно точное, а иногда и суперточное прямолинейное перемещение, плавное без люфтов, с малым коэффициентом трения, с высокой износостойкостью.
Известно устройство роликовой замкнутой опоры с кресообразно расположенными роликами в сепараторе цепного типа.
Недостатками этой конструкции являются большие габариты, сложность изготовления сепаратора и сборки.
Кроме того, такая опора имеет невысокую жесткость, т.к. применение сепаратора увеличивает расстояние между роликами, а следовательно уменьшает их количество в контакте с направляющей.
Целью изобретения является упрощение конструкции и повышение технологичности.
Указанная цель достигается тем, что на корпусе опоры закреплены направляющие, имеющие по периферии форму тел качения, расположенных непрерывно по периметру, причем, они в свою очередь установлены внутри гибкого элемента, имеющего внутреннюю поверхность соответствующую форме тел качения.
Кроме того, с целью удержания гибкого элемента от перекосов и провисания он расположен в пазах корпуса и направляющей.
Упрощение конструкции, технологии изготовления и сборки достигается тем, что предлагаемое устройство не содержит сепаратора цепного типа, требующего больших затрат на изготовление и сборку.
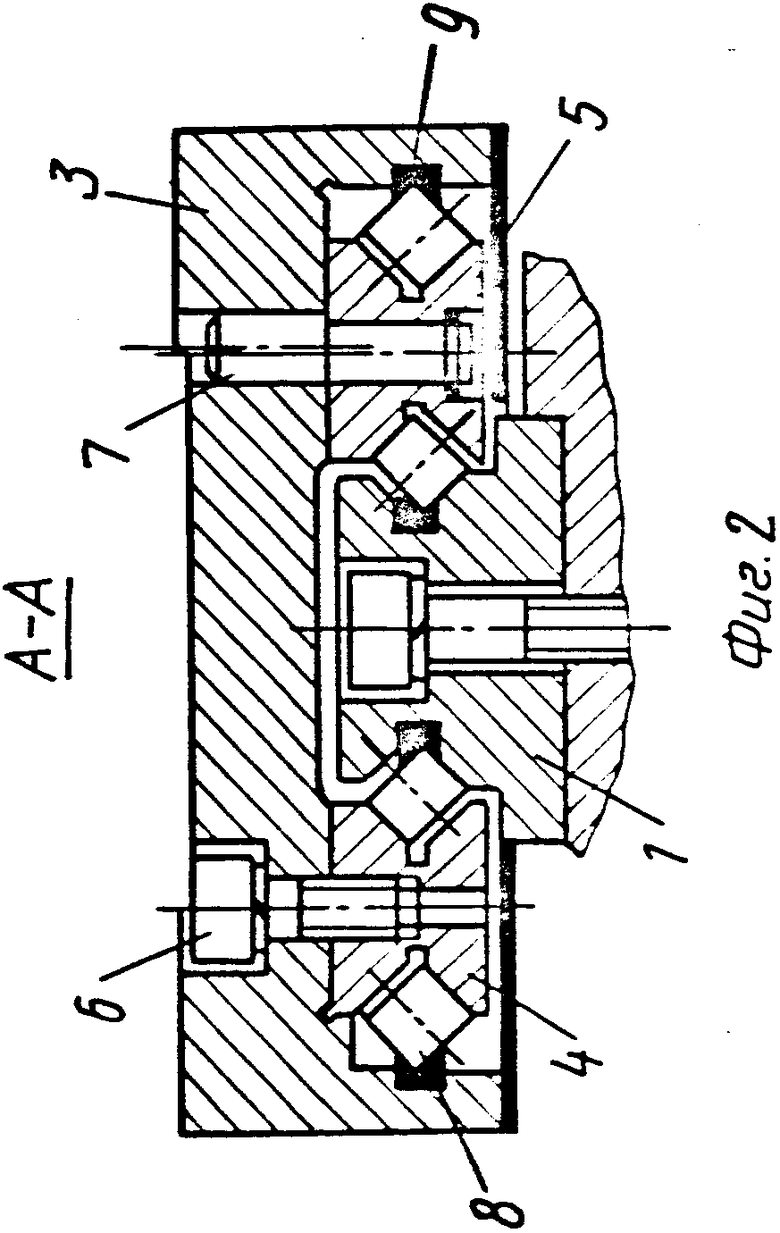
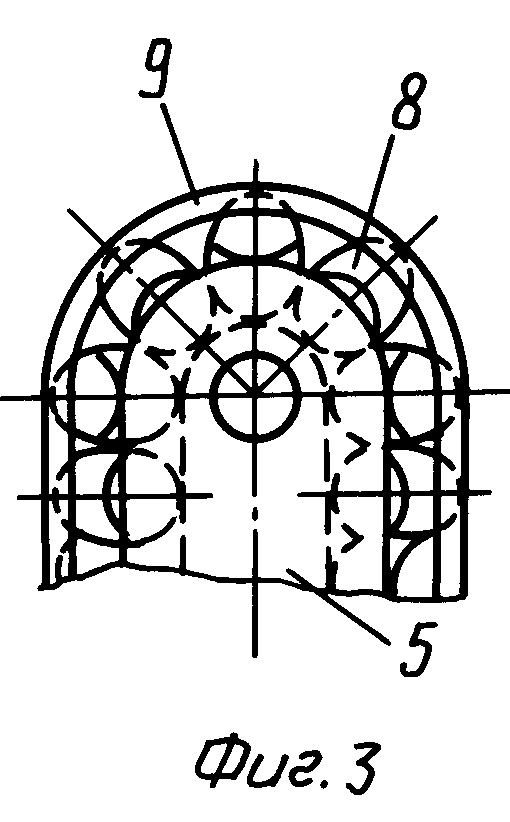
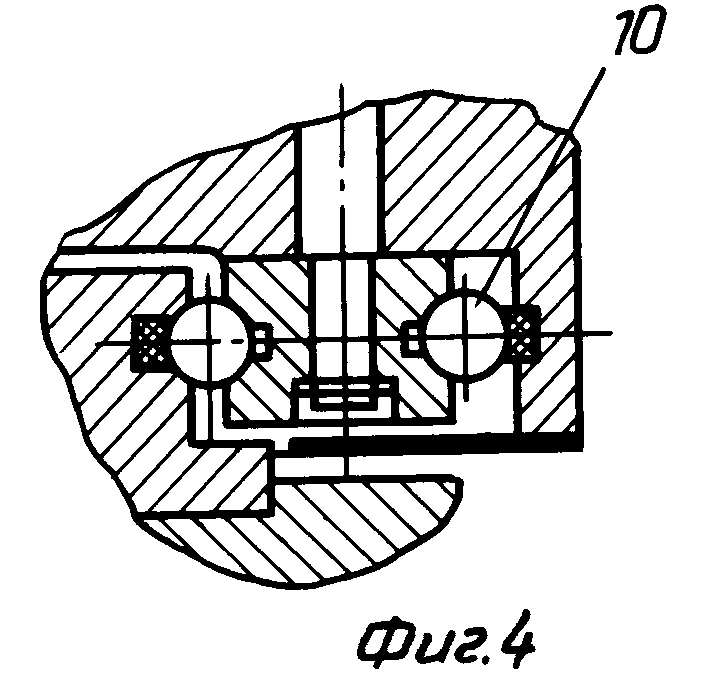
На фиг. 1 представлен модуль, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - роликовый блок в сборе; на фиг. 4 - вариант применения в качестве тел качения шариков.
Модуль качения состоит из неподвижной направляющей 1 и каретки 2, которых на направляющей 1 может быть расположено несколько в зависимости от нагрузки. На практике, чаще всего, используют два аналогичных модуля, имеющих по две каретки.
Каретка содержит корпус 3, на котором закреплены неподвижная 4 и регулируемая 5 направляющие винтами 6. Регулировка предварительного натяга в направляющих осуществляется в данном примере эксцентриком 7. Ролики 8 расположены по периметру направляющих 4, 5, имеющих по периферии форму тел качения. Ролики 8, в данном примере, имеют через один взаимно перпендикулярные оси. Диаметр роликов несколько больше их длины. В свою очередь ролики установлены внутри гибкого замкнутого элемента 9, имеющего внутреннюю поверхность соответствующую форме роликов 8. Для избежания перекоса и провисания элемента 9 он размещен в пазах, расположенных в корпусе 3 и направляющей 1.
Возможны и другие варианты конструкции модуля, например, с использованием в качестве тел качения шариков (10).
При перемещении каретки 2 по направляющей 1 ролики 8 обкатываются по периметру направляющих 4, 5, а от выпадания на участке возврата удерживаются гибким элементом 9.
Использование заявляемого изобретения позволит значительно удешевить изготовление и сборку модулей качения за счет применения накладных направляющих вместо каналов возврата (шарики), гибкого элемента вместо сложных сепараторов, стандартных роликов вместо специальных.
Кроме того, увеличивается нагрузочная способность.
Изобретение относится к точному машиностроению, станкостроению, приборостроению и может быть использовано, в частности в узлах для точного прямолинейного перемещения. Сущность изобретения состоит в том, что вместо каналов для возврата тел качения и сепараторов применены две направляющие, по периметру которых обкатываются тела качения, причем от выпадания они удерживаются гибким элементом. 4 ил.
МОДУЛЬ КАЧЕНИЯ ДЛЯ ПРЯМОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ, содержащий неподвижную направляющую, корпус и тела качения, отличающийся тем, что, с целью упрощения конструкции и повышения технологичности, модуль снабжен двумя направляющими планками и гибким элементом, при этом периферийная поверхность направляющих планок выполнена по форме тел качения и предназначена для размещения последних непрерывно, причем гибкий элемент установлен в выполненных в корпусе и неподвижной направляющей пазах, а его внутренняя поверхность выполнена по форме тел качения и предназначена для взаимодействия с последними.
| Детали и механизмы металлорежущих станков | |||
| Под.ред.Д.Н.Решетова, т.1 - М., 1972, с.356. |
