Изобретение относится к трикотажному машиностроению. Задачей изобретения является расширение технологических возможностей автомата и улучшение условий обслуживания.
На фиг. 1, 2 и 3 представлена схема предлагаемого механизма.
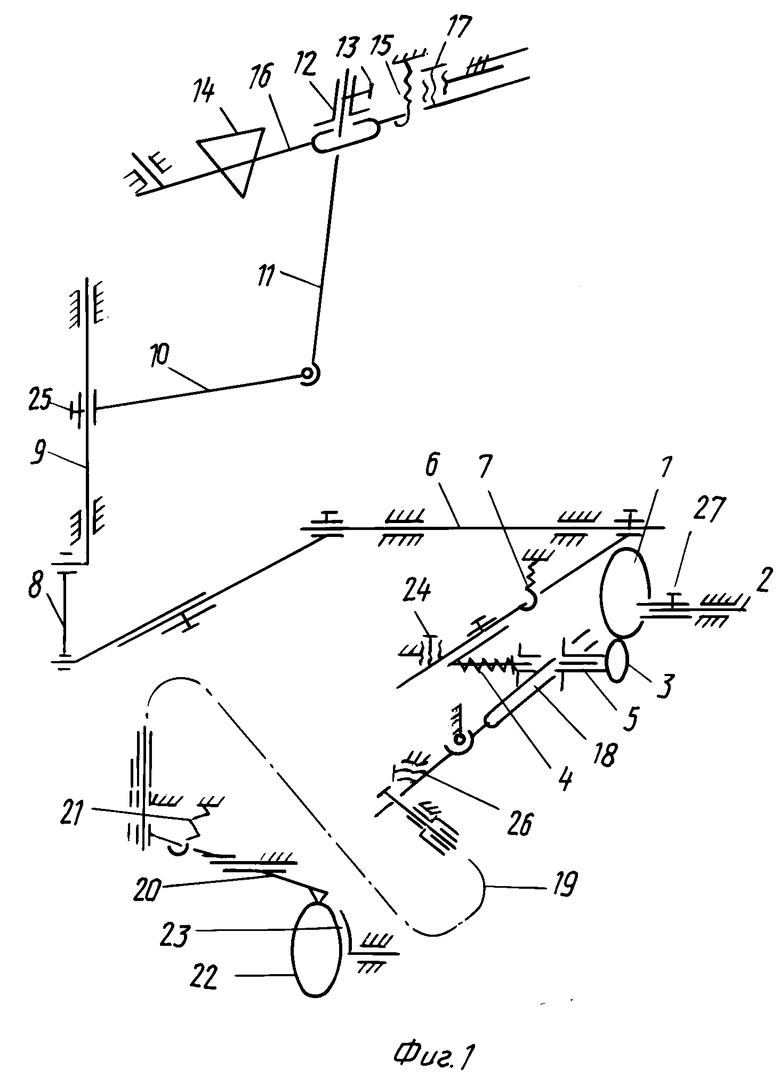
Механизм плавного изменения длины петель включает кулак 1, размещенный на главном валу 2 автомата и взаимодействующий с роликом 3, установленным посредством подпружиненной пружиной 4 направляющей 5 на плече П-образного двуплечего рычага 6, подпружиненного пружиной 7. Другое плечо рычага шарнирно связано с серьгой 8, шарнирно соединенной с вертикальной стойкой 9, расположенной в направляющих станины автомата и несущей кронштейн 10, связанный посредством сферического шарнира с тягой 11, имеющей упор 12 со стопорным винтом 13. Кулирный клин 14 установлен на подпружиненном пружиной 15 рычаге 16, контактирующем с тягой 11. Рычаг 16 имеет стопорный винт 17. Механизм кинематически связан с устройством отключения, содержащим поворотную втулку 18, контактирующую своими ветвями с направляющей 5 ролика 3, а основанием связанную посредством троса 19 с плечом двуплечего рычага 20, подпружиненного пружиной 21 и контактирующего другим плечом с барабаном 22 управления, имеющим накладку 23. При этом П-образный рычаг 6, кронштейн 10 и вилка 18 снабжены стопорными винтами 24, 25, 26 соответственно, а кулак 1 имеет крепежную муфту и стопорный винт 27.
Механизм работает следующим образом.
При переключении с вязания паголенка на вязание пятки поворачивается барабан 22 управления. Подпружиненный двуплечий рычаг 20 сходит с накладки 23, освобождая трос 19. Пружина 4 перемещает освободившуюся вилку 18, направляющую 5 и ролик 3 до тех пор, пока ролик не касается кулака 1. Когда кулак 1 поворачивается, освобождая место для ролика, пружина 4 перемещает его под действие кулака, при этом вилка 18 упирается в стопорный винт 26, ограничивающий выход ролика за кулак 1. Под действием кулака 1 плечи двуплечего рычага 6 при плавном увеличении радиуса кулака плавно опускают серьгу 8, стойку 9, кронштейн 10 и тягу 11. Упор 12 плавно опускает рычаг 16 и кулирный клин 14, плавно увеличивая глубину кулирования в соответствии с плавным увеличением радиуса кулака 1. При плавном уменьшении радиуса кулака 1 под действием пружины 7 плечи двуплечего рычага 6 плавно поднимаются, поднимая серьгу 8, стойку 9, кронштейн 10 и тягу 11, упор 12. Пружина 15 плавно поворачивает рычаг 16 вверх, плавно уменьшая глубину кулирования до тех пор, пока рычаг 16 не касается винта 17, ограничивающего минимальный уровень кулирования. После вывязывания пятки поворачивается барабан 22 управления, рычаг 20 выходит на накладку 23, натягивая трос 19. Трос 19 поворачивает вилку 18, которая, сжимая пружину 4, перемещает направляющую 5 и ролик 3 влево, выводя его из взаимодействия с кулаком 1. При этом плечи двуплечего П-образного рычага под действием пружины 7 поднимаются до винта-упора 24, ограничивающего подъем рычага. Поднимаются серьга 8, стойка 9, кронштейн 10, тяга 11 и упор 12. Упор 12 перестает взаимодействовать с рычагом 16. Пружина 15 поднимает рычаг 16 в верхнее положение, ограниченное стопорным винтом 17.
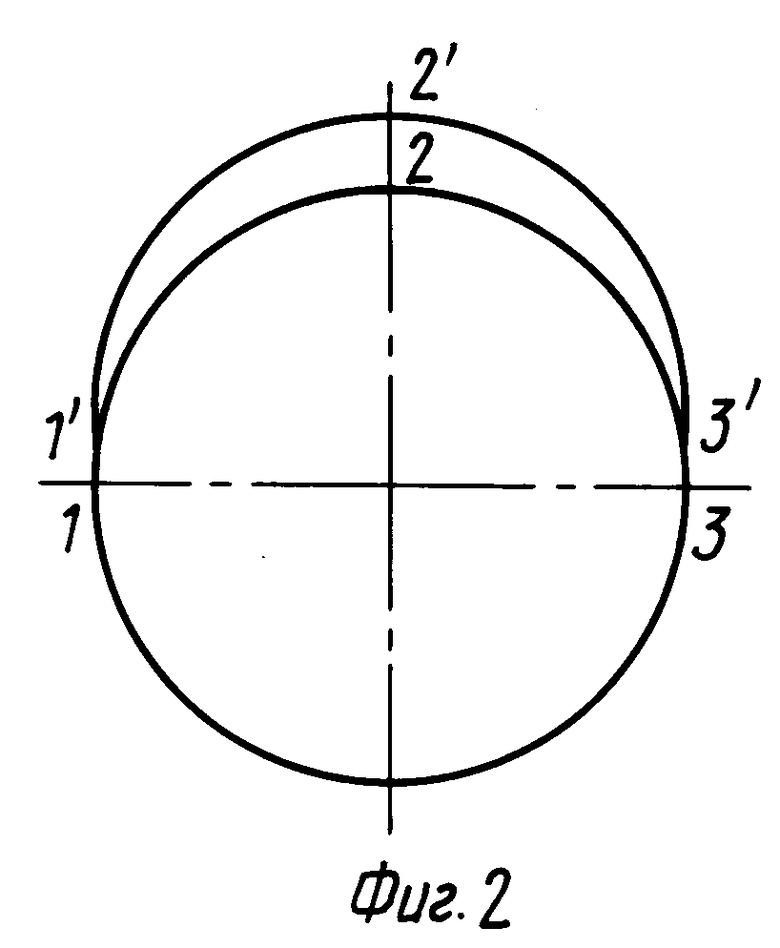
Кронштейн 10 содержит стопорный винт 25 для установки его по высоте с целью регулировки зазора между упором 12 и рычагом 16. Упор 12 имеет стопорный винт 13 с той же целью. Чем больше зазор между упором 12 и рычагом 16, тем позднее начинает опускаться и раньше перестает подниматься кулирный клин при том же действии кулака 1, т.е. чем меньше глубина кулирования и чем меньше зазор, тем больше глубина кулирования. Кроме того, меняется зона, где изменяется глубина кулирования (фиг. 2). Если при обычной работе механизма изменения глубины кулирования глубина кулирования изменяется в зоне 1-2-3, то при увеличении зазора между упором 12 и рычагом 16 изменение глубины кулирования происходит в зоне 11 - 2 - 31.
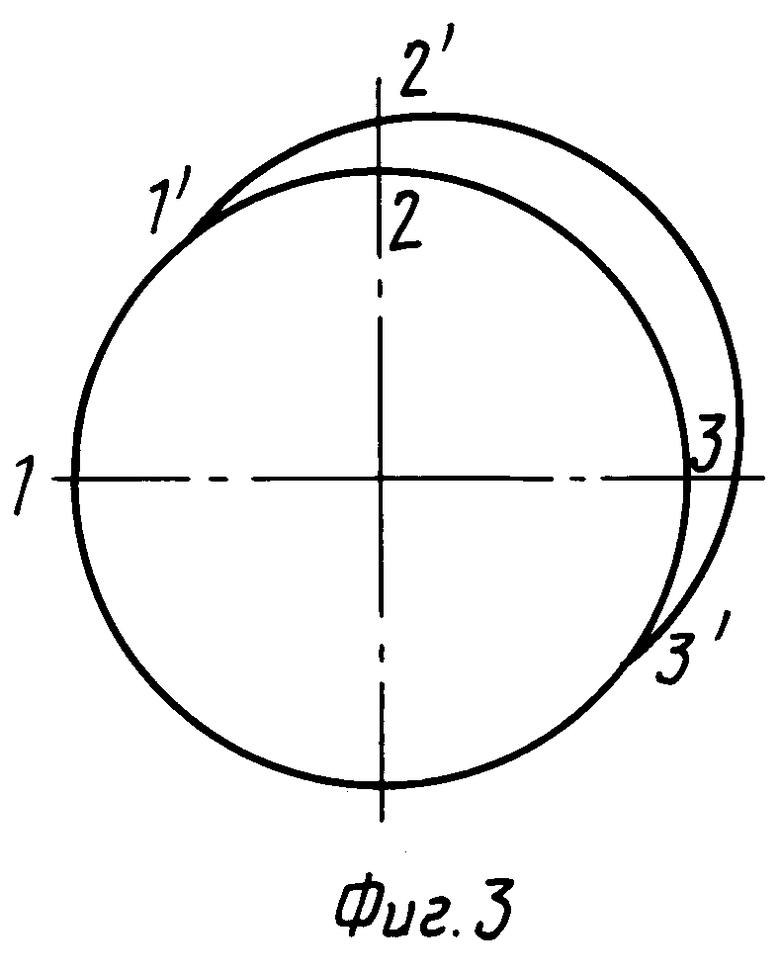
Кулак 1 содержит крепежную муфту и стопорный винт 27, которые обеспечивают регулировку начала и конца изменения глубины кулирования на требуемых иглах (фиг. 3). При изменении длины плеча, содержащего ролик, изменяется положение точки взаимодействия ролика и кулака и, соответственно, изменение глубины кулирования происходит в зоне 11 - 2 - 31. Чтобы сохранить прежнюю зону изменения глубины кулирования, необходимо отвернуть стопорный винт 27, повернуть кулак и зафиксировать его положение стопорным винтом 27.
Изобретение позволяет улучшить условия обслуживания.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЛАВНОГО ИЗМЕНЕНИЯ ДЛИНЫ ПЕТЕЛЬ ОДНОЦИЛИНДРОВОГО ЧУЛОЧНО-НОСОЧНОГО АВТОМАТА | 1986 |
|
SU1468040A1 |
| Устройство для изменения скорости подачи нитей основы круглой основовязальной машины | 1978 |
|
SU896104A1 |
| УСТРОЙСТВО ИЗМЕНЕНИЯ ДЛИНЫ ПЕТЕЛЬ ОДНОЦИЛИНДРОВОГО ЧУЛОЧНО-НОСОЧНОГО АВТОМАТА | 1986 |
|
SU1363901A1 |
| Механизм прокачки ушковых игл круглой основовязательной машины | 1978 |
|
SU858381A1 |
| ОДНОЦИЛИНДРОВЫЙ КРУГЛОЧУЛОЧНЫЙ ЖАККАРДОВЫЙ АВТОМАТ | 1977 |
|
SU900657A1 |
| КРУГЛАЯ ОСНОВОВЯЗАЛЬНАЯ МАШИНА | 1999 |
|
RU2151224C1 |
| Механизм радиального перемещения платин круглой основязальной машины | 1979 |
|
SU887650A1 |
| Автомат для изготовления проволочных граблин | 1980 |
|
SU925493A1 |
| Механизм сдвига ушковых гребенок круглой основовязальной машины | 1979 |
|
SU896106A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРУЖИН С ДВУХСТОРОННЕЙ НАВИВКОЙ И ИЗГИБОМ В СРЕДНЕЙ ЧАСТИ | 2001 |
|
RU2197356C1 |
Изобретение относится к трикотажному машиностроению. Сущность: механизм включает установленный на станине автомата посредством подпружиненного рычага кулирный клин, кинематически связанный с роликом и устройством отключения, и контактирующий с роликом кулак, установленный на главном валу автомата. Кинематическая цепочка, связывающая ролик и кулирный клин, включает установленный на станине автомата П-образный двуплечий рычаг, одно плечо которого посредством подпружиненной направляющей соединено с роликом, а другое через серьгу шарнирно связано с вертикальной стойкой. Вертикальная стойка смонтирована в направляющих станины автомата и через кронштейн шарнирно соединена посредством сферического шарнира с тягой. Тяга размещена в кулисном отверстии подпружиненного рычага кулирного клина и контактирует с ним посредством упора. Устройство отключения содержит поворотную вилку, контактирующую с направляющей ролика, и связанную основанием через трос с подпружиненным двуплечим рычагом, шарнирно установленным на станине автомата и контактирующим с барабаном управления. 6 з.п. ф-лы, 3 ил.
| Автоматы чулочно-носочного типа ОЗД "Вязальное оборудование трикотажных фабрик" под ред | |||
| Ю.Т.Джермакяна, М.; Легкая и пищевая промышленность, 1985, с.287. |
