Изобретение относится к электронной технике, а более конкретно к области создания виброизолируемых измерительных и технологических платформ с прецизионными координатными столами для субмикронных и нанотехнологий изготовления изделий электронной техники. Изобретение может использоваться в области точного приборостроения в испытательных системах для защиты от вибраций и ударов прецизионных чувствительных элементов.
Известны различные конструкции пространственных виброзащитных устройств, предназначенных для защиты от внешних вибраций и ударов размещаемого на них прецизионного оборудования, в которых обеспечивается виброзащита от поступательных вибраций основания и сохранение ориентации за счет направляющих устройств. Направляющие устройства имеют различный принцип действия и конструктивное исполнение - в виде упругих систем на плоских пружинах или в виде параллелограммных пространственных механизмов. Направляющие придают виброзащитному устройству высокую угловую жесткость, обеспечивающую сохранение ориентации [1]. Указанные виброзащитные устройства имеют существенный недостаток - ограниченную эффективность виброзащиты, так как направляющие представляют собой конструктивные элементы, по которым вибрация от основания передается на защищаемое оборудование (особенно в диапазоне средних и высоких частот вибраций).
Известны конструкции виброзащитных устройств для испытаний чувствительных элементов, в которых используется активный виброзащитный подвес, обеспечивающий как виброзащиту, так и угловую стабилизацию платформы. Пассивная часть виброзащитного устройства выполнена на взаимно независимых пневматических амортизаторах типа Barry Servo level, снабженных регуляторами уровня. Активная часть устройства, образующая с пассивной последовательные каскады виброзащиты, представляет собой сервопривод, управляемый по сигналу датчика горизонта, расположенного на платформе [2]. Недостатки указанных активных виброзащитных устройств: необходимость обеспечения постоянного расхода воздуха, связанную с работой регулятора уровня пневматического амортизатора; значительная статическая нагрузка, которую несет исполнительный элемент сервопривода каскада активной виброзащиты и угловой стабилизации; возрастают требования к мощности приво- да и возникают определенные проблемы, связанные с точностью и ресурсом устройства.
Наиболее близким к изобретению по технической сущности и совокупности существенных признаков является виброзащитное устройство, содержащее основание, платформу и установленные между ними последовательно двухкамерные пневматические амортизаторы каскада пассивной виброзащиты, промежуточную массу и электромагнитные исполнительные устройства каскада угловой стабилизации и активной виброзащиты, а также установленные на платформе датчики горизонта и вибропреобразователи, выходы которых связаны со входами соответствующего усилителя-преобразователя. Высокочастотные вибрации основания гасятся двухкамерными пневматическими амортизаторами за счет потерь при перетекании воздуха из одной камеры в другую через дроссельный канал. Угловая стабилизация достигается за счет деформации упругих элементов силами, которые создаются электромагнитными исполнительными устройствами в соответствии с сигналами управления, вырабатываемыми усилителем-преобразователем по сигналу с датчика горизонта [3].
Недостаток устройства, выбранного за прототип - малый амплитудный диапазон угловой стабилизации.
Для создания компенсирующего усилия в исполнительном электромагнитном устройстве, например для компенсации изменения нагрузки на опору при работе размещаемых на платформе устройств позиционирования, электромагнитная система должна создать усилие Fк= Δр (1+Сy/Са), где Δр - изменение нагрузки на опору; Са, Сy - жесткости пневмоамортизатора и упругого элемента электромагнитного исполнительного устройства опоры соответственно. Указанному усилию соответствует компенсирующее перемещение упругого элемента U=Fк/Cy. Поскольку упругий элемент электромагнитного исполнительного устройства воспринимает всю статическую нагрузку и дополнительно усилие предварительного поджатия, то конструктивно не представляется возможным обеспечить его жесткость меньше, чем жесткость пневмоамортизатора. На практике будет иметь место Сy >> Cа, и, следовательно, Fк >>Δр. Таким образом, амплитудный диапазон угловой стабилизации будет весьма ограниченным. Применение мощных силовых электромагнитных систем, являющихся источниками магнитного и электрического полей, в виброзащитном устройстве для прецизионного электронного оборудования требует принятия специальных защитных мер по экранировке.
Цель изобретения - расширение диапазона и повышение точности угловой стабилизации виброзащищаемой платформы.
Цель достигается тем, что устройство снабжено электродвигателем, вход которого соединен с выходом усилителя-преобразователя, кинематической передачей, вход которой связан с валом электродвигателя, и устанавливаемыми на основании пневматическими камерами с встречно-направленными поршнями и жестко связывающим последние штоком, являющимся выходным звеном кинематической передачи, преобразующей вращение вала электродвигателя в поступательное перемещение штока. Полость каждой пневматической камеры соединена с полостью соответствующего пневматического амортизатора через дроссель. Кинематическая передача выполнена необратимой в виде редуктора, кинематической пары винт-гайка, представляющей собой связанную с выходным колесом редуктора и установленную в подшипниках соосно штоку гайку и выполненную в средней части штока резьбу, и направляющего устройства, образованного выполненным на штоке продольным пазом и входящим в него и закрепляемым на основании пальцем.
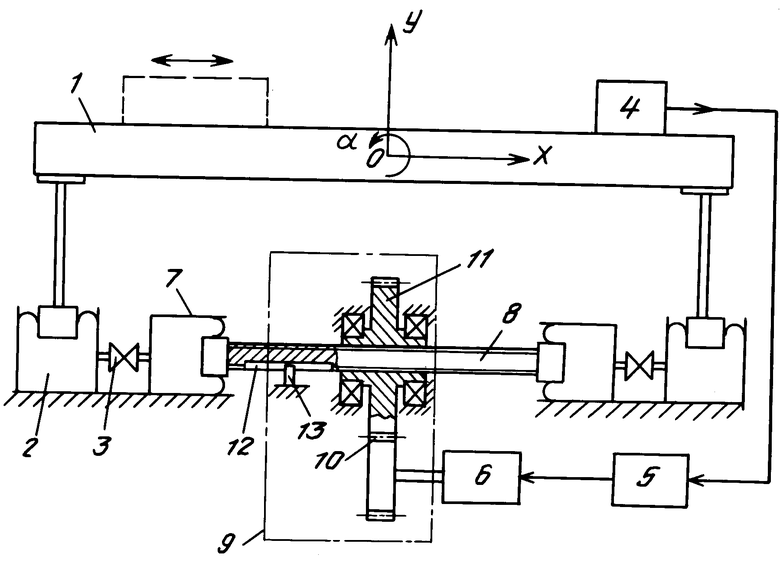
На чертеже изображена схема виброзащитного устройства с угловой стабилизацией.
Устройство содержит виброзащищаемую и горизонтируемую платформу 1, пневматические амортизаторы 2, установленные на основании и связывающие его с платформой, дроссели 3, установленный на платформе датчик горизонта 4, выход которого подключен ко входу усилителя-преобразователя 5, электродвигатель 6, вход которого соединен с выходом усилителя-преобразователя, установленные на основании пневматические камеры 7, поршни которых встречно направлены и жестко связаны штоком 8. Полость каждой пневматической камеры 7 соединена с полостью соответствующего пневматического амортизатора через дроссель 3. Шток 8 является выходным звеном кинематической передачи 9, преобразующей вращение вала электродвигателя 6 в поступательное перемещение штока 8. Кинематическая передача 9 выполнена необратимой в виде редуктора 10, кинематической пары винт-гайка и направляющего устройства. Пару винт-гайка образуют резьба, выполненная в средней части штока 8, и гайка 11, установленная в подшипниках соосно штоку и связанная с выходным колесом редуктора. Направляющее устройство образует продольный паз 12 на штоке и входящий в него и закрепляемый на основании палец 13.
Устройство работает следующим образом. В исходном состоянии за счет избыточного давления в полостях амортизаторов 2 обеспечиваются всплытие платформы 1 - пневматическая подвеска платформы и грубая выставка плоскости платформы в горизонтальную плоскость. Давление в каждом амортизаторе 2 определяется конкретным распределением масс платформы и нагрузки относительно амортизаторов, а шток 8 находится в среднем положении. При включении системы угловой стабилизации датчиком горизонта 4 вырабатывается сигнал, пропорциональный углу наклона платформы. В усилителе-преобразователе 5 в соответствии с указанным сигналом вырабатывается сигнал управления электродвигателем 6. Вращение вала электродвигателя через редуктор 10 и кинематическую пару винт-гайка вызывает поступательное перемещение штока 8, причем направляющее устройство (палец 13 в пазу 12) препятствует возникновению нежелательного вращательного движения штока. Перемещаясь относительно основания, шток 8 перемещает встречно направленные поршни пневматических камер 7, вызывая изменение их объемов. При этом изменяются и давления в соответствующих полостях пневматических амортизаторов 2: в одном из амортизаторов давление увеличивается, в то время как в другом - уменьшается. Возникающий при этом момент сил, приложенный к платформе, вызывает уменьшение угла наклона платформы. Изменение положения центра масс оборудования на платформе вызывает перераспределение нагрузок на пневмоамортизаторах 2, которое парируется пневмообъемным регулированием давления в пневмоамортизаторах. Таким образом, обеспечивается угловая стабилизация платформы относительно плоскости горизонта. Вибрации основания 1 гасятся пневматическими амортизаторами 2 за счет небольшой жесткости амортизаторов и рассеивания энергии колебаний при перетекании воздуха через дроссель 3 из полости амортизатора в соответствующую полость пневматической камеры 7. При этом пневматические камеры 7 выполняют функции демпферных камер.
Технико-экономические преимущества заявляемого виброзащитного устройства с угловой стабилизацией по сравнению с базовым объектом, характеризующим уровень техники и совпадающим в данном случае с прототипом: расширение диапазона угловой стабилизации платформы в результате увеличения допустимого хода (так называемых углов прокачки) платформы; повышение точности угловой стабилизации платформы в результате того, что момент стабилизации к платформе прикладывается через пневматические амортизаторы, которые благодаря присущим им физическим свойствам являются естественными фильтрами высоких частот и обеспечивают снижение высокочастотных угловых вибраций платформы; снижение мощности привода при одновременном увеличении допустимых нагрузок, действующих на платформу, так как в предлагаемом устройстве силы, приложенные к встречно направленным поршням пневматических камер, противоположно направлены и в значительной мере взаимно уравновешиваются на жестком штоке, а электропривод отрабатывает только разностную нагрузку; снижение энергопотребления и увеличение надежности благодаря выполнению кинематической передачи необратимой, так как это свойство обеспечивает ненагруженный режим работы электродвигателя привода в периоды стабилизированного (горизонтального) положения платформы даже в условиях неравномерного распределения нагрузки на опоры (при ненулевой разностной нагрузке на штоке).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 2000 |
|
RU2222729C2 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| Самонастраивающийся амортизатор | 2018 |
|
RU2696150C1 |
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ПОДВЕСКИ И ВИБРОЗАЩИТЫ, В КОТОРОЙ ПРИМЕНЯЮТСЯ НИЗКОФРИКЦИОННЫЕ ТРОСОВЫЕ ДЕМПФЕРЫ | 2014 |
|
RU2645561C2 |
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |
| АМОРТИЗАТОР | 2009 |
|
RU2426921C2 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2574649C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
Использование: в электронной технике, точном приборостроении, а именно, в виброизолируемых измерительныхи технологических платформах, испытательных системах защиты от вибраций и ударов прецизионных чувствительных элементов. Сущность изобретения: виброзащитное устройство с угловой стабилизацией содержит платформу, пневматические амортизаторы с дросселями, датчик горизонта, усилитель-преобразователь, электродвигатель, кинематическую передачу и пневматические камеры со встречно направленными поршнями и жестко связывающим последние штоком. Шток является выходным звеном пневматической передачи, преобразующей вращение вала электродвигателя в поступательное перемещение штока. Полость каждой пневматической камеры соединена с полостью соответствующего пневматического амортизатора через дроссель. Кинематическая передача может быть выполнена необратимой в виде редуктора, кинематической пары винт-гайка и направляющего устройства. 1 з.п. ф-лы, 1 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Виброзащитное устройство | 1986 |
|
SU1401193A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
