Изобретение относится к измерительной технике, а именно к средствам контроля датчиков угловой скорости (ДУС).
Известен стенд для контроля измерителей угловой скорости, содержащий корпус; траверсу, закрепленную на корпусе с возможностью вращения; платформу, закрепленную на оси траверсы и предназначенную для закрепления на ней контролируемого прибора, который через преобразователь сигнала связан с управляющим компьютером, измерительный датчик угловой скорости, ось чувствительности которого совмещена с осью вращения траверсы, а по его выходной оси расположены датчики угла и момента, соединенные через систему обратной связи, содержащую предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности; датчик угла разворота траверсы, связанный через преобразователь сигнала с управляющим компьютером; двигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов; систему управления двигателем постоянного тока, содержащую устройство формирования разностного сигнала, усилитель-преобразователь и два усилителя мощности, при этом выход устройства формирования разностного сигнала соединен с первым входом системы управления двигателем; первый, второй и третий выходы системы управления двигателем соединены с первым, вторым и третьим входами электродвигателя постоянного тока, первый и второй выходы которого соединены со вторым и третьим входами системы управления двигателем [8, 14].
К недостаткам, присущим аналогу [8, 14], можно отнести следующие:
1. Невозможность задания угловых скоростей, выше 72%, определяемых предельно возможным диапазоном измерения ДУС - чувствительного элемента стенда.
2. Моменты трения, действующие по оси вращения стенда, и моменты тяжения коллектора не позволяли получить нестабильность задаваемой угловой скорости менее 0.0005°/с.
3. Фотоэлектрический муаровый датчик угла имел динамические ошибки, возрастающие при увеличении угловой скорости свыше 30°/с.
Известен широкодиапазонный стенд для контроля измерителей угловой скорости, содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу основную платформу для установки измерителя угловых скоростей, электродвигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов, причем датчик положения имеет один вход и два выхода, а двигатель бесконтактный имеет два входа; усилитель мощности электродвигателя постоянного тока, содержащий предварительный усилитель с одним входом и одним выходом и два усилителя мощности, каждый из которых имеет один вход и один выход, причем выход предварительного усилителя соединен с входом датчика положения, один выход которого соединен с входом первого усилителя мощности, а второй выход с входом второго усилителя мощности, выход каждого усилителя мощности соединен с соответствующей обмоткой двигателя бесконтактного; четыре датчика Холла и взаимодействующий с ними магнит, кольцевой коллектор, состоящий из коллекторной втулки и щеток для подвода питания, дополнительную платформу, закрепленную на валу, шесть кварцевых маятниковых акселерометров, гироскопический датчик угловой скорости, цилиндрическую втулку, стержень, ленточный торсион, упругий торцевой токоподвод, два геркона, взаимодействующий с герконами магнит, механизм отслеживания, компьютер, аналого-цифровой преобразователь, плату цифровых портов ввода-вывода, усилитель системы стабилизации с сумматором, входящим в его состав, блок управления механизмом отслеживания, причем гироскопический датчик угловой скорости и акселерометры закреплены на дополнительной платформе, оси чувствительности трех акселерометров для измерения тангенциального ускорения перпендикулярны соответствующим радиусам дополнительной платформы, а оси чувствительности трех акселерометров для измерения центростремительного ускорения ориентированы вдоль соответствующих радиусов дополнительной платформы, каждый акселерометр содержит кварцевую пластину, емкостной датчик угла и магнитоэлектрический датчик момента, соединенные последовательно через соответствующие усилители обратной связи, каждый из которых содержит предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности, гироскопический датчик угловой скорости содержит датчик угла и датчик момента, соединенные последовательно через усилитель обратной связи, содержащий предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности, а ось чувствительности гироскопического датчика угловой скорости параллельна оси вала, упругий торцевой токоподвод содержит верхнюю и нижнюю гетинаксовые колодки и золотые проводники подвода питания, прикрепленные к колодкам, два геркона закреплены на нижней колодке с обеспечением угла 8 градусов между контактами герконов, магнит закреплен на верхней колодке в среднем положении между контактами герконов, цилиндрическая втулка подвешена в корпусе на шарикоподшипниковых опорах соосно с валом, проходящим внутри цилиндрической втулки, верхняя колодка упругого торцевого токоподвода закреплена на валу, а нижняя колодка - на цилиндрической втулке, вал выполнен полым на одном участке своей длины, ленточный торсион размещен в полости вала и прикреплен нижним концом к торцу полого участка вала, а верхним концом к середине стержня, который расположен перпендикулярно оси вала, проходит через отверстия цилиндрического полого участка вала и прикреплен двумя концами к торцам цилиндрической втулки, жестко соединенной с коллекторной втулкой, механизм отслеживания содержит импульсный шаговый двигатель и зубчатую передачу, при этом шаговый двигатель прикреплен к корпусу через амортизатор, выходное звено зубчатой передачи закреплено на цилиндрической втулке соосно с ней, блок управления механизмом отслеживания имеет два входа, соединенных с герконами, и четыре выхода, соединенных с обмотками импульсного шагового двигателя, причем для регистрации угла разворота платформы в фиксированных точках четыре датчика Холла располагаются через каждые 90° на корпусе стенда, а взаимодействующий с ними магнит - на основной платформе стенда [8, 9, 10, 11, 15].
В известном стенде были достигнуты следующие положительные результаты по сравнению с ранее известными аналогами:
- чувствительность разработанного стенда, т.е. минимальная угловая скорость, которую можно задать при проверке масштабного коэффициента контролируемого ДУС, определялась не моментами трения на оси вращения стенда и коэффициентом трения в редукции, а моментами сопротивления на оси прецессии контролируемого ДУС и порогом чувствительности прецизионных кварцевых маятниковых акселерометров, т.е. величинами, на несколько порядков меньшими, чем в ранее известных технических решениях;
- повышение точности и стабильности задаваемой стендом угловой скорости обеспечивалось за счет наличия в предлагаемом стенде многоконтурной системы управления, что дало возможность за счет ряда контуров (системы обратной связи ДУС - чувствительного элемента стенда и акселерометров, измеряющих тангенциальные и центростремительные ускорения точек их крепления к платформе стенда) обеспечить устойчивость системы, повысив при этом во втором контуре (из условий достижения необходимой точности и стабильности задаваемой угловой скорости) коэффициент усиления усилителя стабилизации, управляющего бесконтактным двигателем постоянного тока, и обеспечить управление не только по угловой скорости, но и по ее первой производной;
- использование в качестве инерциальных чувствительных элементов кварцевых маятниковых акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда, позволило улучшить качество регулирования, снизить погрешности системы управления, повысить точностные характеристики стенда и обеспечить нижний предел задания угловой скорости в 0.01°/с;
- использование в качестве инерциальных чувствительных элементов кварцевых маятниковых акселерометров, измеряющих центростремительное ускорение точек их крепления к платформе стенда, позволило расширить диапазон задаваемых угловых скоростей до 1200°/с при сохранении высокой точности их задания;
- наличие механизма отслеживания позволило на порядок снизить вредные моменты по оси вращения стенда и, соответственно, повысить точность и стабильность задаваемой угловой скорости за счет разгрузки шарикоподшипников оси вала от веса испытуемого прибора путем «взвешивания» платформы с испытуемым прибором на ленточном торсионе, испытывающем при этом растяжение и передающем вес платформы с испытуемым прибором на шарикоподшипники оси вращения коллектора, а также за счет полного исключения влияния на ось вращения вала момента трения коллектора, т.к. коллекторная втулка имеет свою ось подвеса, и момент трения в коллекторе «парируется» шаговым двигателем механизма отслеживания, а к оси вала приложен малый момент упругих торцевых токоподводов;
- возможность контроля АЧХ и ФЧХ на стенде, т.е. расширение функциональных возможностей обеспечивалось безредукторным исполнением привода и отсутствием возбудителей вибрационных взаимовлияний элементов стенда, искажающих задаваемые вокруг оси стенда гармонические колебания;
- стенд позволил производить измерение масштабного коэффициента ДУС при повороте его подвижной части вокруг оси стенда на любой угол (значительно меньший оборота), что сократило время испытания, без снижения точности контроля, как это имело место в ранее известных технических решениях;
- стенд позволил обеспечить выходную информацию не только по угловой скорости, но и по углу разворота платформы за счет применения четырех датчиков Холла, фиксирующих точное значение угла разворота платформы через каждые 90 градусов, а также и по угловому ускорению, рассчитываемому по информации акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда.
Однако, несмотря на вышеприведенные достоинства, прототип не был свободен от недостатков, заключающихся в следующем.
1. Акселерометры, измеряющие центростремительное ускорение точек их крепления к платформе стенда, используемые в высокоскоростном режиме как измерители угловой скорости, измеряли квадрат угловой скорости (aц=ω2·R), что приводило к зависимости полосы пропускания и величины масштабного коэффициента стенда от угловой скорости, это приводило к необходимости обеспечивать калибровку установки в каждом скоростном диапазоне.
2. Так как фотоэлектрические муаровые датчики угла имеют динамические ошибки, возрастающие при увеличении угловой скорости свыше 30°/с, то их применение в данной конструкции стенда было нецелесообразным, а в качестве измерителей угла использовались четыре датчика Холла, позволяющие точно фиксировать угол через каждые 90° при условии совершения платформой стенда полного оборота, однако точное значение угла в любой точке разворота платформы получить прямым способом измерения было невозможно [13].
3. Стенд обладал аналоговой обратной связью, что исключало ее модернизацию без изменения элементной базы и структуры, а, соответственно, в конечном счете при изменении каких-либо параметров стенда (как, например, момента инерции платформы, корректировки динамических свойств системы управления), требовало разработки новой математической модели и проектирования нового электронного устройства, обеспечивающего устойчивость стенда как системы автоматического управления.
4. Стенд имел возможность задания либо постоянных по величине и направлению, либо гармонически изменяющихся угловых скоростей, но не имел возможности программного задания угловых колебаний платформы по любому требуемому закону.
5. ЭВМ в стенде являлась регистрирующим, но не управляющим устройством, что было обусловлено развитием вычислительной техники в момент подачи заявки на аналог, а также недостаточными ресурсами процессора: это значительно ограничивало возможности стенда.
Задачей изобретения является разработка широкодиапазонного стенда с цифровой системой управления, предназначенного для контроля измерителей угловой скорости, обеспечивающего повышение точности контроля масштабного коэффициента измерителей угловых скоростей разных типов путем более точного и стабильного задания стендом угловых скоростей, а также обеспечения возможности контроля динамических характеристик ДУС за счет расширения функциональных возможностей стенда, а именно возможности задания угловых скоростей, изменяющихся по любому закону, заданному программным способом, возможности высокоточного измерения угла поворота платформы во всем диапазоне задаваемых угловых скоростей, а также возможности изменения структуры регулятора и динамических свойств системы управления стендом путем перепрограммирования в случае необходимости цифровой части регулятора в управляющем процессоре.
Технический результат достигается тем, что в широкодиапазонный стенд для контроля измерителей угловой скорости, содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу основную платформу для установки измерителя угловых скоростей, электродвигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов, причем датчик положения имеет один вход и два выхода, а двигатель бесконтактный имеет два входа; усилитель мощности электродвигателя постоянного тока, содержащий предварительный усилитель с одним входом и одним выходом, и два усилителя мощности, каждый из которых имеет один вход и один выход, причем выход предварительного усилителя соединен с входом датчика положения, один выход которого соединен с входом первого усилителя мощности, а второй выход с входом второго усилителя мощности, выход каждого усилителя мощности соединен с соответствующей обмоткой двигателя бесконтактного; четыре датчика Холла и взаимодействующий с ними магнит, кольцевой коллектор, состоящий из коллекторной втулки и щеток для подвода питания, дополнительную платформу, закрепленную на валу, шесть кварцевых маятниковых акселерометров, гироскопический датчик угловой скорости, цилиндрическую втулку, стержень, ленточный торсион, упругий торцевой токоподвод, два геркона, взаимодействующий с герконами магнит, механизм отслеживания, компьютер, аналого-цифровой преобразователь, плату цифровых портов ввода-вывода, усилитель системы стабилизации с сумматором, входящим в его состав, блок управления механизмом отслеживания, причем гироскопический датчик угловой скорости и акселерометры закреплены на дополнительной платформе, оси чувствительности трех акселерометров для измерения тангенциального ускорения перпендикулярны соответствующим радиусам дополнительной платформы, а оси чувствительности трех акселерометров для измерения центростремительного ускорения ориентированы вдоль соответствующих радиусов дополнительной платформы, каждый акселерометр содержит кварцевую пластину, емкостной датчик угла и магнитоэлектрический датчик момента, соединенные последовательно через соответствующие усилители обратной связи, каждый из которых содержит предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности, гироскопический датчик угловой скорости содержит датчик угла и датчик момента, соединенные последовательно через усилитель обратной связи, содержащий предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности, а ось чувствительности гироскопического датчика угловой скорости параллельна оси вала, упругий торцевой токоподвод содержит верхнюю и нижнюю гетинаксовые колодки и золотые проводники подвода питания, прикрепленные к колодкам, два геркона закреплены на нижней колодке с обеспечением угла 8 градусов между контактами герконов, магнит закреплен на верхней колодке в среднем положении между контактами герконов, цилиндрическая втулка подвешена в корпусе на шарикоподшипниковых опорах соосно с валом, проходящим внутри цилиндрической втулки, верхняя колодка упругого торцевого токоподвода закреплена на валу, а нижняя колодка - на цилиндрической втулке, вал выполнен полым на одном участке своей длины, ленточный торсион размещен в полости вала и прикреплен нижним концом к торцу полого участка вала, а верхним концом к середине стержня, который расположен перпендикулярно оси вала, проходит через отверстия цилиндрического полого участка вала и прикреплен двумя концами к торцам цилиндрической втулки, жестко соединенной с коллекторной втулкой, механизм отслеживания содержит импульсный шаговый двигатель и зубчатую передачу, при этом шаговый двигатель прикреплен к корпусу через амортизатор, выходное звено зубчатой передачи закреплено на цилиндрической втулке соосно с ней, блок управления механизмом отслеживания имеет два входа, соединенных с герконами, и четыре выхода, соединенных с обмотками импульсного шагового двигателя, причем для регистрации угла разворота платформы в фиксированных точках четыре датчика Холла располагаются через каждые 90° на корпусе стенда, а взаимодействующий с ними магнит - на основной платформе стенда, с целью повышения точности контроля масштабного коэффициента измерителей угловых скоростей разных типов путем более точного и стабильного задания стендом угловых скоростей, а также обеспечения возможности контроля динамических характеристик ДУС за счет расширения функциональных возможностей стенда, а именно возможности задания угловых скоростей, изменяющихся по любому закону, заданному программным способом, возможности высокоточного измерения угла поворота платформы во всем диапазоне задаваемых угловых скоростей, а также возможности изменения структуры регулятора и динамических свойств системы управления стендом путем перепрограммирования в случае необходимости цифровой части регулятора в управляющем процессоре, в систему управления стендом введены семь аналого-цифровых и восемь цифроаналоговых преобразователей, информационная шина цифроаналоговых преобразователей, информационная шина аналого-цифровых преобразователей, трехфазный усилитель мощности, процессор, содержащий в том числе модуль широтно-импульсного формирования напряжения питания гиромотора и пять портов ввода-вывода, при этом входы первого, третьего и пятого аналого-цифровых преобразователей соединены с выходами первого, третьего и пятого предварительных усилителей цепей обратной связи соответствующих акселерометров, измеряющих центростремительное ускорение точек их крепления к платформе стенда, а входы второго, четвертого и шестого аналого-цифровых преобразователей с выходами второго, четвертого и шестого предварительных усилителей цепей обратной связи соответствующих акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда, вход же седьмого аналого-цифрового преобразователя соединен с выходом предварительного усилителя цепи обратной связи измерительного датчика угловой скорости, входы первого, третьего и пятого предварительных усилителей соединены с выходами датчиков угла соответствующих акселерометров, измеряющих центростремительное ускорение точек их крепления к платформе стенда, входы второго, четвертого и шестого предварительных усилителей соединены с выходами датчиков угла соответствующих акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда, вход седьмого предварительного усилителя соединен с выходом датчика угла измерительного ДУС, а выходы всех аналого-цифровых преобразователей соединены с информационной шиной аналого-цифровых преобразователей, выход которой соединен с первым портом ввода-вывода управляющего процессора, в котором реализованы алгоритмическим способом устройства фазочувствительного выпрямления, корректирующие контуры систем управления измерительным датчиком угловой скорости и шестью кварцевыми маятниковыми акселерометрами, измеряющими тангенциальное и центростремительное ускорения точек их крепления к платформе стенда, а также устройство формирования разностного сигнала и корректирующий контур системы управления двигателем стенда, причем три выхода широтно-импульсного формирователя напряжения, встроенного в управляющий процессор, соединены с тремя входами трехфазного усилителя мощности, три выхода которого соединены с каждой из трех соответствующих обмоток трехфазного синхронного гистерезисного двигателя гиромотора измерительного датчика угловой скорости; второй порт ввода-вывода управляющего процессора соединен с информационной шиной цифроаналоговых преобразователей, причем вход каждого цифроаналогового преобразователя соединен с соответствующим выходом информационной шины цифроаналоговых преобразователей, а выходы первого, третьего и пятого цифроаналоговых преобразователей соединены соответственно с входами первого, третьего и пятого усилителей мощности цепей обратной связи соответствующих акселерометров, измеряющих центростремительное ускорение точек их крепления к платформе стенда, выходы второго, четвертого и шестого цифроаналоговых преобразователей соединены соответственно с входами второго, четвертого и шестого усилителей мощности цепей обратной связи соответствующих акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда, выход седьмого цифроаналогового преобразователя соединен с входом усилителя мощности цепи обратной связи измерительного датчика угловой скорости, причем выходы всех усилителей мощности соединены соответственно с датчиками моментов акселерометров, измеряющих тангенциальное и центростремительное ускорения точек их крепления к платформе стенда и измерительного датчика угловой скорости, выход восьмого цифроаналогового преобразователя соединен с входом предварительного усилителя, входящего в состав усилителя мощности электродвигателя постоянного тока стенда. Управляющий компьютер находится в режиме обмена через стандартный интерфейс с третьим портом ввода-вывода управляющего процессора в системе управления стенда, а цифроаналоговые и аналого-цифровые преобразователи могут быть как встроенными в процессор, работающий в обратной связи стенда, так и быть по отношению к нему внешними устройствами, причем электронные блоки, процессорные модули и устройства преобразования сигнала реализованы в виде плат, крепящихся непосредственно на корпусе стенда. В качестве измерителя угла на оси вращения траверсы стенда применен угловой энкодер, считывающие оптические головки которого через преобразователь сигнала соединены с четвертым портом ввода-вывода процессора в системе управления стенда, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления энкодера на выходную информацию об угловом положении платформы стенда, а испытуемым прибором может быть измеритель угловой скорости любого класса и принципа действия, выход которого через преобразователь сигнала соединен с портом ввода-вывода управляющего компьютера, а преобразователь сигнала представляет собой универсальное устройство, преобразующее информацию в виде аналогового сигнала или дискретного сигнала в код стандартного интерфейса используемого компьютера. Выходы левого и правого герконов, закрепленных на нижней колодке упругого торцевого токоподвода, соединены соответственно с первым и вторым входами микроконтроллера, входящего в состав блока управления механизмом отслеживания стенда, состоящего из микроконтроллера, драйвера управления и усилителя мощности, причем четыре выхода микроконтроллера соединены с четырьмя входами драйвера управления, четыре выхода которого соединены с четырьмя входами усилителя мощности, четыре выхода которого, в свою очередь, соединены с четырьмя соответствующими обмотками шагового двигателя механизма отслеживания стенда, порт ввода-вывода микроконтроллера соединен с пятым портом ввода-вывода управляющего процессора, при этом микроконтроллер находится в режиме обмена с процессором через стандартный интерфейс.
Совокупность существенных признаков, характеризующих заявляемое техническое устройство, позволяет в сравнении с прототипом достигнуть технический результат, заключающийся в следующем:
1. Значительно сократить аналоговую элементную базу функциональной электроники в регуляторе стенда, что позволяет существенно уменьшить влияние смещений нулевых сигналов операционных усилителей на точностные характеристики стенда и, тем самым, обеспечить более высокую линейность и стабильность масштабного коэффициента стенда.
2. Дискретный регулятор, реализованный алгоритмически, позволяет производить модернизацию системы управления стендом путем пересчета собственных параметров по синтезированному алгоритму, что расширяет функциональные возможности системы.
3. В высокоскоростном режиме работы, когда управляющий сигнал в систему управления поступает от акселерометров, измеряющих центростремительное ускорение точек их крепления к платформе стенда, исключается зависимость полосы пропускания и динамического масштабного коэффициента от задаваемой угловой скорости за счет вычисления в процессоре угловой скорости 
4. В конструкцию стенда, помимо датчиков Холла, введен угловой энкодер, позволяющий измерять угловые скорости в тысячи градусов в секунду и обеспечивающий дискретность измерения угла после обработки электроникой 0.1”-0.005” в зависимости от типа энкодера, что позволяет значительно повысить точность измерения угла и угловой скорости стенда, а также использовать данную информацию в системе управления стендом и комплексировать ее с информацией с датчиков Холла.
5. Наличие в системе управляющего компьютера позволяет задавать стенду любые программные движения, а не только постоянные по величине и направлению, либо изменяющиеся по гармоническому закону.
6. Процессор, снабженный трехфазным 16-разрядным широтно-импульсным модулятором, позволяет синтезировать трехфазное напряжение питания синусоидальной формы для гиромотора измерительного ДУС, исключив из схемы традиционно используемые статические преобразователи, что повышает качество питающего напряжения гиромотора, позволяет программно подстраивать его частоту и обеспечивает снижение энергопотребления системы и ее габаритно-массовые характеристики.
7. Использование высокопроизводительного процессора с таймером высокого разрешения позволяет вычислять с высокой точностью угловую скорость стенда по информации углового энкодера, которая может вноситься в качестве поправки в управляющий сигнал измерительного датчика угловой скорости по мажоритарному принципу.
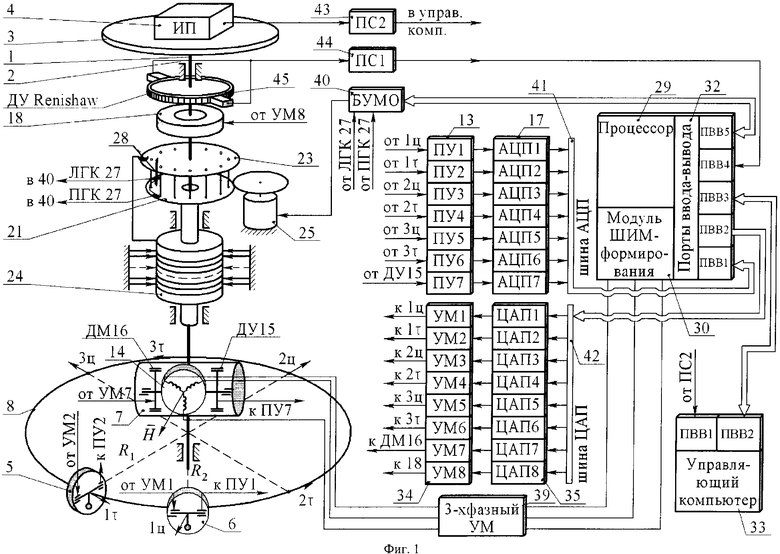
На фиг.1 представлена функционально-кинематическая схема предлагаемого стенда.
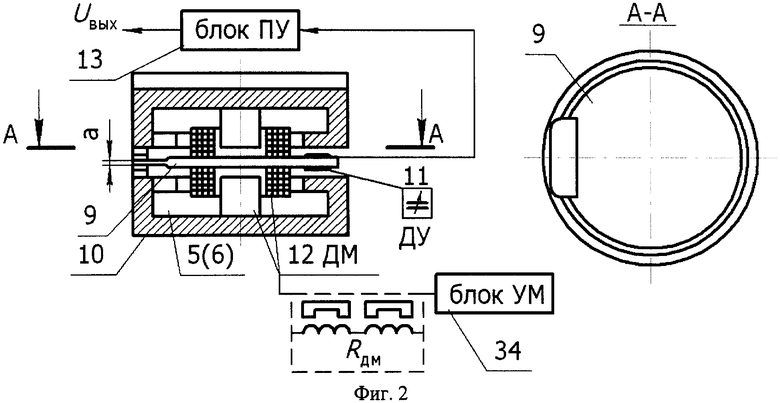
На фиг.2 - конструктивная схема кварцевого маятникового акселерометра.
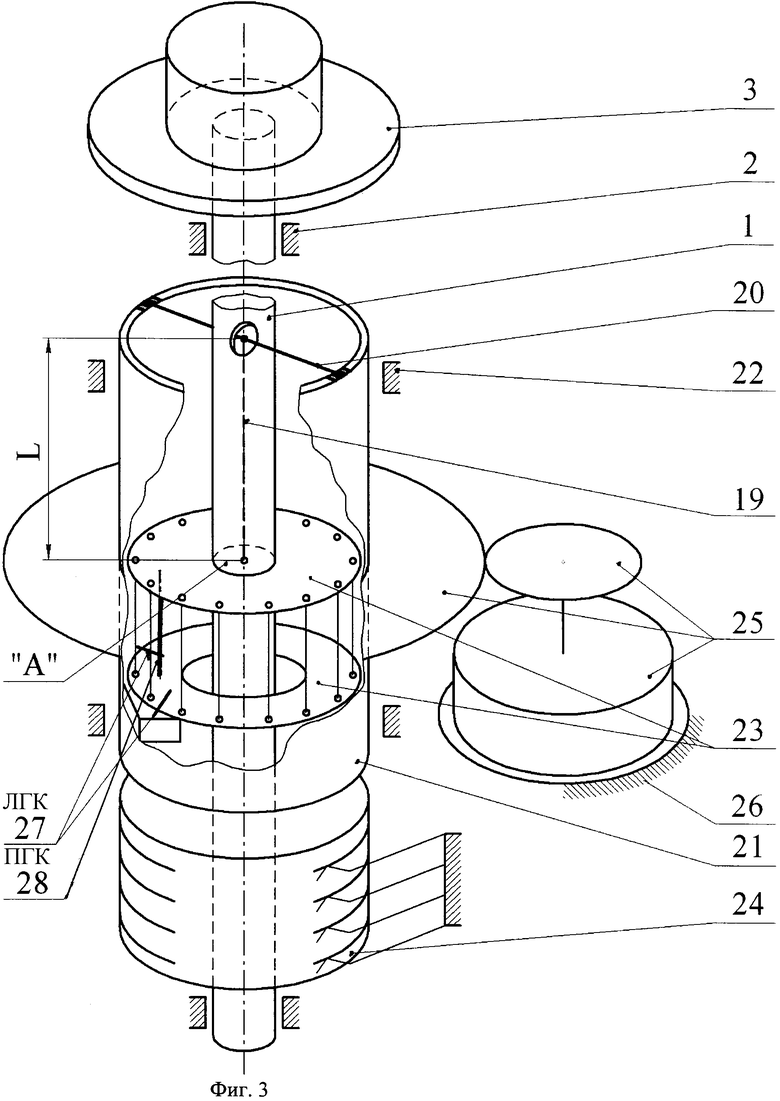
На фиг.3 - конструктивная схема механизма отслеживания коллектора, устройства разгрузки опор вала с помощью ленточного торсиона.
На фиг.4 - функциональная схема системы управления двигателем предлагаемого стенда.
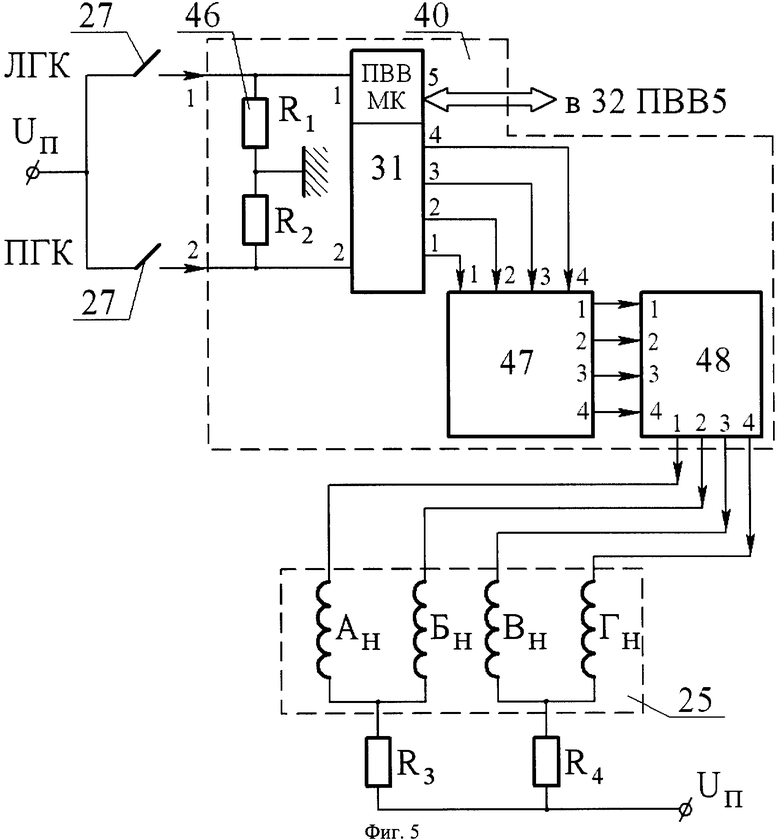
На фиг.5 - функциональная схема блока управления механизмом отслеживания.
На фиг.6 - структурная схема стенда в первом режиме работы.
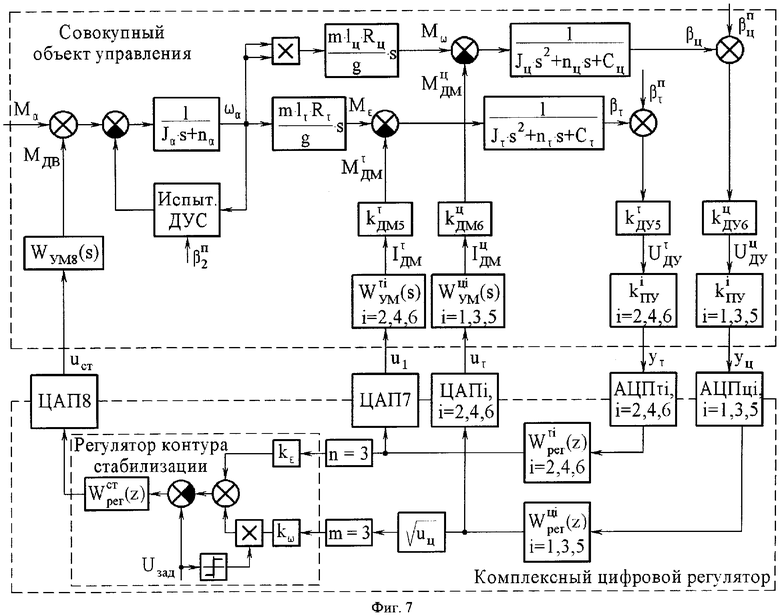
На фиг.7 - структурная схема стенда во втором режиме работы.
Предлагаемое устройство содержит корпус (на фиг.1 не показан), вал 1, имеющий ось вращения относительно корпуса, реализованную на шарикоподшипниках 2, которая является выходной осью стенда. На валу 1 закреплена платформа 3, предназначенная для установки испытуемого прибора 4, а также чувствительные элементы стенда: акселерометры 5, 6 и гироскопический датчик угловой скорости - ДУС 7. Конструктивно это выполнено так, что на валу 1 закреплена дополнительная платформа 8, на которой размещены все чувствительные элементы. При этом акселерометры 5 в количестве трех закреплены так, что измеряют тангенциальное ускорение точек их крепления к платформе 8 стенда. (Для этих акселерометров введены обозначения 1τ, 2τ, 3τ.) В дальнейшем эти акселерометры (1τ, 2τ, 3τ) будут называться тангенциальными. Ось чувствительности каждого акселерометра 5 перпендикулярна радиусу R1 платформы 8. Радиусы R1 акселерометров 5 (1τ, 2τ, 3τ) расположены под углами 120°. Акселерометры 6 в количестве трех закреплены на платформе 8 так, что они измеряют центростремительное ускорение точек их крепления к платформе стенда. (Для этих акселерометров введены обозначения 1ц, 2ц, 3ц.) В дальнейшем эти акселерометры (1ц, 2ц, 3ц) будут называться центростремительными. Ось чувствительности каждого из акселерометров 6 расположена вдоль радиуса R2=R1 платформы 8 в сторону, противоположную действию центростремительного ускорения. Радиусы r2 акселерометров 6 (1ц, 2ц, 3ц) расположены под углами 120°. ДУС 7 закреплен на платформе 8 так, что ось его чувствительности параллельна оси вращения стенда (оси вала 1), а вектор кинетического момента H параллелен плоскости платформы 8.
Чувствительным элементом акселерометров 5, 6 является кварцевая пластина 9, у которой центральная часть (собственно маятник - фиг.2) соединена с наружным кольцом пластины 9 - торсионом, выполненным из той же самой пластины в виде местного утончения а=0.02 мм. Наружное кольцо пластины 9 зажато между двумя полукорпусами 10 акселерометра. Датчик угла 11 акселерометра - емкостной дифференциальный образован поверхностью, напыленной золотом на маятнике пластины 9, и поверхностью корпусов 10. Датчик момента 12 - магнитоэлектрический, состоит из катушек, закрепленных на маятнике пластины 9, и постоянных магнитов, закрепленных на корпусах 10. Электрическая связь между обкладками датчика угла 11, катушками датчика момента 12 и внешними цепями осуществлена с помощью золотого напыления на торсионе пластины 9. Акселерометр 5, закрепленный на платформе 8 так, что ось его чувствительности перпендикулярна радиусу R1 платформы 8, имеет при этом расположение плоскости пластины перпендикулярно плоскости платформы вдоль радиуса R1. Акселерометр 6, закрепленный на платформе 8 так, что ось его чувствительности расположена вдоль радиуса R2 платформы 8 (причем R2=R1), имеет при этом расположение плоскости пластины 9 перпендикулярно радиусу R2, плоскость его пластины 9 также перпендикулярна плоскости платформы 8.
Чувствительный элемент стенда - ДУС 7 представляет собой гироскопический поплавковый датчик угловой скорости, содержащий трехфазный гиромотор 14, датчик угла 15 и датчик момента 16 [2].
Обратные связи всех инерциальных чувствительных элементов: акселерометров 5, 6 и ДУС 7, а также системы управления двигателем стенда имеют аналого-цифровую структуру, реализованную в блоке управления стендом, в состав которого входят:
- блок предварительных усилителей 13, состоящий из семи предварительных усилителей ПУ1-ПУ7, причем входы усилителей ПУ2, ПУ4 и ПУ6 соединены с выходами датчиков угла 11 акселерометров 5 (1τ, 2τ, 3τ), а входы усилителей ПУ1, ПУЗ и ПУ5 - с выходами датчиков угла 11 акселерометров 6 (1ц, 2ц, 3ц), вход же усилителя ПУ7 соединен с выходом датчика угла 15 ДУС 7 чувствительного элемента стенда;
- блок аналого-цифровых преобразователей 17, состоящий из семи аналого-цифровых преобразователей АЦП1-АЦП7, входы которых соединены с соответствующими выходами предварительных усилителей ПУ1-ПУ7 блока предварительных усилителей 13;
- управляющий процессор 29 с пятью стандартными портами ввода-вывода 32 (ПВВ1-ПВВ5) и 16-разрядным широтно-импульсным формирователем 30 для управления напряжением питания гиромотора измерительного ДУС 7;
- шина АЦП 41, к входу которой подключены выходы АЦП1-АЦП7 блока аналого-цифровых преобразователей 17, своим выходом подключенная к первому стандартному порту ввода-вывода (ПВВ1) 32 управляющего процессора 29;
- шина ЦАП 42, вход которой подключен к второму стандартному порту ввода-вывода (ПВВ2) 32 управляющего процессора 29;
- блок цифроаналоговых преобразователей 35, состоящий из восьми цифроаналоговых преобразователей ЦАП1-ЦАП8, входы которых подключены к шине ЦАП 42;
- блок усилителей мощности, состоящий из восьми усилителей мощности УМ1-УМ8, входы которых соединены с соответствующими выходами ЦАП1-ЦАП8 блока цифроаналоговых преобразователей 35, причем выходы усилителей УМ1, УМЗ, УМ5 соединены с датчиками момента 12 акселерометров 6 (1ц, 2ц, 3ц), выходы усилителей УМ2, УМ4, УМ6 - с датчиками момента 12 акселерометров 5 (1τ, 2τ, 3τ), выход же усилителя УМ7 соединен с датчиком момента 16 измерительного ДУС 7, а выход усилителя УМ8 - с обмотками управления датчика положения - двигателя бесконтактного ДП-ДБ18;
- трехфазный усилитель мощности 39, входы которого связаны с выходами ШИМ - формирователя 30 управляющего процессора 29, а выходы - с соответствующими обмотками трехфазного синхронного гистерезисного двигателя, являющегося гиромотором ДУС 7;
- блок управления механизмом отслеживания 40, первый и второй входы которого соединены с левым и правым герконами 27, а третий вход с пятым портом ввода-вывода (ПВВ5) 32 управляющего процессора 29, а выходы - с шаговым двигателем 25 механизма отслеживания стенда.
Выход углового энкодера 45 соединен с входом первого преобразователя сигнала ПС1 44, выход которого соединен с четвертым портом ввода-вывода (ПВВ4) 32 управляющего процессора 29. Выход испытуемого прибора 4 соединен с входом второго преобразователя сигнала 43, выход которого соединен со вторым портом ввода-вывода управляющего компьютера 33. Второй порт ввода-вывода управляющего компьютера 33 соединен с третьим портом ввода-вывода (ПВВ3) 32 управляющего процессора 29; обмен информацией между компьютером 33 и процессором 29 осуществляется через стандартный интерфейс.
Введение в конструкцию стенда датчика угла фирмы RENISHAW - оптического углового энкодера типа SIGNUM RESM 45 позволило повысить точность отсчета угла поворота платформы стенда за счет получения информации о мгновенных значениях угла поворота платформы, а не только в контрольных точках с датчиков Холла, как это было реализовано в прототипе [15].
В датчик угла 45 фирмы RENISHAW, установленный в стенд, входят:
- кольцо типа RESM20 с нанесенными масштабными штрихами и встроенной нулевой меткой IN-TRAC™;
- две считывающие головки типа SR с кабелем;
- два интерфейса типа SIGNUM с разрешением 0,02-0,2 мкм.
Кольцо RESM представляет собой цельное кольцо из нержавеющей стали, на боковую поверхность которого с интервалом 20 мкм нанесены масштабные штрихи и автофазирующая оптическая нулевая метка INTRAC™. Малые масса (порядка 100-200 г) и момент инерции кольца (около 2 г·см·с2), которое закреплено на траверсе 2, позволяют практически не ухудшить динамические характеристики траверсы с закрепленными на ней чувствительным элементом, платформой и испытуемым прибором.
Две считывающие головки SIGNUM закреплены на корпусе так, что угол между нулевыми метками составляет 180°. Измерение угла поворота платформы стенда происходит при считывании отраженного от масштабной шкалы сигнала с помощью системы RENISHAW SIGNUM, реализованной в считывающей головке. Расположение нулевых меток двух считывающих головок под углом 180° позволяет исключить влияние эксцентриситета наружного диаметра кольца относительно оси вращения траверсы. Информация с выхода считывающих головок выдается в виде квадратурного кода с уровнями напряжения, соответствующими стандарту RS-422, и вводится непосредственно в четвертый порт ввода-вывода (ПВВ4) 32 управляющего процессора 29.
На фиг.3 представлена детализированная конструктивная схема соединения вала 1 с элементами, закрепленными на нем (ниже ДП-ДБ 18).
Вал 1 выполнен в виде трубы на длине L, которая соединена в единую строго соосную систему с верхней и нижней частями вала 1, имеющими сплошное сечение.
К торцу «А» полого участка вала 1 жестко прикреплен нижний конец торсиона 19, верхний конец которого жестко соединен со стержнем 20, расположенным горизонтально и своими концами соединенным жестко со втулкой 21. Стержень 20, располагаясь горизонтально, проходит через два цилиндрических отверстия полого участка вала 1, ось которых перпендикулярна оси вала 1, а диаметр отверстий допускает относительный разворот стержня 20 и вала 1 на углы ±4°. Ленточный торсион 19 имеет длину 200 мм и поперечное сечение b=4 мм, h=0,2 мм. Втулка 21 полая, подвешена в корпусе стенда на двух шарикоподшипниках 22. Внутри втулки 21 размещен торцевой упругий токоподвод 23 (на фиг.1 размещение токоподвода 23 показано условно, на фиг.3 это размещение соответствует конкретному исполнению).
Токоподвод 23 состоит из двух колодок из гетинакса, имеющих n отверстий (n=48), расположенных на окружностях одного и того же радиуса друг против друга, через отверстия проходят золотые проволочки (диаметром 0,05 мм), концы которых закрепляются на торце каждой колодки. Конструкции таких торцевых упругих токоподводов широко используются в гироскопическом приборостроении для подвода питания к элементам на осях карданова подвеса гироприборов [6]. В КБ «ПО Корпус» имеется разработанная конструкция такого токоподвода на 48 линий (КХ6.629.091).
Верхняя колодка токоподвода 23 жестко связана с валом 1, нижняя колодка токоподвода 23 жестко связана со втулкой 21. Со втулкой 21 жестко соединена втулка кольцевого многодорожечного коллектора 24, на которой выполнены золоченые кольцевые контактные дорожки. Щетки коллектора 24 жестко связаны с корпусом стенда. Конструкция коллекторов описана в [6]. В КБ «ПО Корпус» применяются коллекторы 6 В4.833.005 (число цепей 50), 6 В4.833.007 (число цепей 46). Со втулкой 21 соединено зубчатое колесо - выходное звено механизма отслеживания 25, содержащего одну зубчатую передачу с коэффициентом передачи i=10 и шаговый двигатель. В качестве шагового двигателя механизма отслеживания 25 применен шаговый двигатель ДШИ-200-1 реверсивный с электронным управлением, большим моментом на валу (2500 г·см без учета редукции) и магнитной фиксацией заданного углового положения. Конструкция таких шаговых двигателей описана в литературе [17, 18].
Механизм отслеживания 25 крепится к корпусу стенда через амортизирующую резиновую прокладку 26. На нижней колодке токоподвода 23 закреплены два геркона (герметичных контакта) 27, на верхней колодке токоподвода закреплен магнит 28. Герконы 27 расположены так, что контакты расположены по радиусам окружности, угол между контактами равен 8°. Магнит 28, закрепленный на верхней колодке токоподвода 23, находится в среднем положении между контактами. Магнит 28 и пара герконов 27 предназначены для регистрации углов положения и рассогласования верхней и нижней колодок токоподвода 23 в пределах ±4°.
Для управления шаговым двигателем механизма отслеживания 25 служит блок управления механизмом отслеживания (БУМО) 40.
На фиг.4 представлена функциональная схема системы управления двигателем предлагаемого стенда. Неподвижные части датчика положения (ДП) и двигателя бесконтактного (ДБ) 18 соединены в одном корпусе, жестко закрепленном на корпусе стенда. Датчик положения (ДП) 18 представляет собой синусно-косинусный вращающий трансформатор с безобмоточным ротором (С1-С2 - обмотка возбуждения, С3-С4 - синусная обмотка, С5-С6 - косинусная обмотка). Двигатель постоянного тока бесконтактный 18 также имеет косинусную и синусную обмотки (С1-С2 и С3-С4) [1, 5].
Система управления (УМ8) в блоке усилителей мощности 34 содержит предварительный усилитель 36 и два идентичных каскада усилителя мощности - УM81 37 и УМ82 38. Предварительный усилитель 36 предназначен для модуляции и усиления постоянного сигнала, поступающего от ЦАП8 в блоке цифроаналоговых преобразователей 35, выполнен на базе операционного усилителя с применением в качестве ключевых элементов полевых транзисторов. Каждый из усилителей YM81 37 и УМ82 38 представляет собой соединение устройств для детектирования, коррекции и усиления сигналов, т.е. состоит из модулятора, корректирующего устройства и усилителя мощности, реализованных на операционных усилителях с отрицательной обратной связью [16].
Каскады УМ8 в блоке усилителей мощности 34 - УМ81 37 и УМ82 38 и двигатель ДП-ДБ 18 соединены следующим образом. Выход предварительного усилителя 36 соединен с обмоткой возбуждения С1-С2 датчика положения ДП 18. Обмотка датчика положения С3-С4 соединена с входом каскада УM81 37 усилителя мощности УМ8 в блоке 34, а обмотка С5-С6 соединена с входом каскада УМ82 38 усилителя мощности УМ8 в блоке 34. Выходы каскадов 37 и 38 УМ8 соединены соответственно с синусной и косинусной обмотками С1-С2 и С3-С4 двигателя ДБ 18.
На фиг.5 представлена структурная схема блока управления механизмом отслеживания (БУМО) 40, который содержит устройство управления 31, в качестве которого может быть использован микроконтроллер, первый и второй входы которого соединены соответственно с левым и правым герконами 27. На входах микроконтроллера 31 подключены шунтирующие резисторы 46 (R1 и R2) для исключения ложных срабатываний микроконтроллера при разомкнутых герконах. Микроконтроллер содержит в своем составе генератор импульсов и порт ввода-вывода (ПВВ МК). Четыре выхода микроконтроллера 31 соединены с четырьмя входами драйвера управления 47, предназначенного для формирования требуемой последовательности коммутации обмоток шагового двигателя. Четыре выхода драйвера управления 47 соединены с четырьмя входами усилителя мощности 48, четыре выхода последнего соединены с обмотками Ан, Бн, Вн, Гн шагового двигателя механизма отслеживания 25. Резисторы R3 и R4 - балансировочные. Порт ввода-вывода микроконтроллера (ПВВ МК) 31 БУМО 40 соединен с пятым портом ввода-вывода (ПВВ 5) 32 управляющего процессора 29 и находится с ним в режиме обмена через стандартный интерфейс.
В основном режиме - режиме контроля масштабного коэффициента измерителей угловой скорости - предлагаемый стенд работает следующим образом.
Работа стенда осуществляется в двух режимах:
- низкоскоростном в диапазоне от 0.01 до 30°/с, когда в качестве чувствительных элементов работают измерительный ДУС 7 и три акселерометра 5, измеряющих тангенциальное ускорение точек их крепления к платформе стенда;
- высокоскоростном в диапазоне от 30 до 1200°/с, когда в качестве чувствительных элементов работают тройки акселерометров 5 и 6, измеряющих тангенциальное и центростремительное ускорения точек их крепления к платформе стенда.
Управление режимами работы задает оператор от управляющего компьютера 33. Сигнал о смене режимов поступает с управляющего компьютера 33 в управляющий процессор 29 через третий порт ввода-вывода ПВВ3 32. В управляющем процессоре 29 реализован алгоритм переключения диапазонов работы стенда. В зависимости от подаваемой оператором угловой скорости управляющий компьютер 33 подает команду на выбор режима задания угловых скоростей - низкоскоростного либо высокоскоростного. Если выбран низкоскоростной режим, то подаются команды на включение питания ДУС 7 и тангенциальных акселерометров 5, т.е. подается питание на: гиромотор 14, датчик угла ДУ15, предварительный усилитель ПУ 7, усилитель мощности УМ7, АЦП7, ЦАП7, а также на предварительные усилители ПУ2, ПУ4, ПУ6, усилители мощности УМ2, УМ4, УМ6, АЦП2, АЦП4, АЦП6, ЦАП2, ЦАП4, ЦАП6 и процессор 29.
С выхода широтно-импульсного формирователя 30 процессора 29 выдаются импульсы на трехфазный усилитель мощности 39, а с него - на трехфазный синхронный гистерезисный двигатель 14 выдается трехфазное синусоидальное напряжение. В процессоре 29 запрограммирован алгоритм формирования ШИМ - управления трехфазным синхронным гистерезисным двигателем 14 измерительного ДУС 7, причем амплитуда импульсов на каждом из трех выходов изменяется по синусоидальному закону, фазовый сдвиг между формируемыми синусоидами составляет 120°. Гиромотор 14 запускается и через время, соответствующее времени готовности ДУС 7, компьютер подает команду на задание угловой скорости определенной величины, принадлежащей выбранному диапазону угловых скоростей.
От управляющего компьютера 33 в третий порт ввода-вывода ПВВ3 32 управляющего процессора 29 подается код, пропорциональный задаваемой угловой скорости, в процессоре 29 реализован алгоритмически корректирующий контур цепи управления двигателем стенда. Сформированный процессором 29 код выдается на второй порт ввода-вывода ПВВ2 32, а оттуда через шину ЦАП 42 - на вход ЦАП8 блока цифроаналоговых преобразователей 35. С выхода ЦАП8 блока цифроаналоговых преобразователей 35 аналоговый сигнал, пропорциональный задаваемой угловой скорости, поступает на вход предварительного усилителя 36 мощности УМ8 блока усилителей мощности 34.
Усилитель УМ8 (фиг.4) состоит из предварительного усилителя 36 и двух блоков УM81 37 и УМ82 38. Предварительный усилитель 36 вырабатывает модулирующие напряжения, подаваемые на вход двигателя 18, а именно на обмотку С1-С2 ДП.
При появлении напряжения на обмотке С1-С2 в выходных обмотках С3-С4 и С5-С6 индуцируются напряжения: Uдп1=Umax·sinQ и Uдп2=Umax·cosQ, где Q=n·φ, где φ - относительный угол разворота ротора ДП относительно статора, n - число пар полюсов. Эти напряжения усиливаются и корректируются усилителями 37 и 38, после чего поступают на обмотки С1-С2 и С3-С4 ДБ. Суммарный момент, действующий на ротор двигателя 18, равен сумме моментов, развиваемых обмотками ДБ:
M=M1-2+М3-4=k-Фmax·J·(sinQ·sinQ+cosQ·cosQ)=k·Фmax·J,
где k - крутизна характеристики ДБ, Фmax - максимальное значение магнитного потока, J - средняя величина тока в ДБ 18.
Двигатель 18 развивает момент, начинается вращение вала 1 с угловой скоростью ω. Угловая скорость ω действует вдоль оси вала 1.
В первом низкоскоростном режиме работы гироскопический датчик угловой скорости (ДУС) 7 измеряет угловую скорость ω, действующую по его оси чувствительности, параллельной оси вращения вала 1. По цепи обратной связи ДУС течет ток, пропорциональный действующей угловой скорости ω:  С выхода датчика угла 15 ДУС 7 сигнал поступает в предварительный усилитель ПУ7 блока предварительных усилителей 13, а далее - через АЦП7 блока аналого-цифровых преобразователей 17 и шину АЦП 41 - в первый порт ввода-вывода ПВВ1 32 управляющего процессора 29, в котором алгоритмически реализован цифровой регулятор обратной связи ДУС 7. С выхода цифрового регулятора код, пропорциональный измеренной ДУС 7 угловой скорости ω, поступает на сумматор, алгоритмически реализованный в процессоре 29, где сравнивается с кодом, поступающим от управляющего компьютера 33, пропорциональным задаваемой угловой скорости ω. При этом формируется код, пропорциональный разностному сигналу, который подается на ЦАП8 и далее через усилитель мощности УМ8 на двигатель стенда 18. При разности заданной и измеренной ДУС 7 угловой скорости, равной нулю, обеспечивается вращение платформы с заданной угловой скоростью.
С выхода датчика угла 15 ДУС 7 сигнал поступает в предварительный усилитель ПУ7 блока предварительных усилителей 13, а далее - через АЦП7 блока аналого-цифровых преобразователей 17 и шину АЦП 41 - в первый порт ввода-вывода ПВВ1 32 управляющего процессора 29, в котором алгоритмически реализован цифровой регулятор обратной связи ДУС 7. С выхода цифрового регулятора код, пропорциональный измеренной ДУС 7 угловой скорости ω, поступает на сумматор, алгоритмически реализованный в процессоре 29, где сравнивается с кодом, поступающим от управляющего компьютера 33, пропорциональным задаваемой угловой скорости ω. При этом формируется код, пропорциональный разностному сигналу, который подается на ЦАП8 и далее через усилитель мощности УМ8 на двигатель стенда 18. При разности заданной и измеренной ДУС 7 угловой скорости, равной нулю, обеспечивается вращение платформы с заданной угловой скоростью.
Одновременно код, пропорциональный измеренной ДУС 7 угловой скорости ω, поступает в первый порт ввода-вывода ПВВ1 32 управляющего процессора 29. Процессор 29 формирует и выдает через второй порт ввода-вывода ПВВ2 32 код на шину ЦАП 42, а затем код поступает на ЦАП7 блока цифроаналоговых преобразователей 35, откуда преобразованный в аналоговый сигнал через усилитель мощности УМ7 блока усилителей мощности 34 поступает на датчик момента 16 ДУС 7, осуществляя, тем самым, обратную связь измерительного ДУС 7 - чувствительного элемента стенда. Таким образом, в режиме задания угловых скоростей до 30°/с реализована двухконтурная цифровая система управления вращением платформы.
Если угловая скорость ω постоянна, т.е. ω=ω0, то угловое ускорение е=0, тангенциальное линейное ускорение равно нулю и напряжение Uaτ на всех трех выходах 1τ, 2τ, 3τ усилителей мощности УМ2, УМ4 и УМ6 блока усилителей мощности 34, замыкающих обратные связи акселерометров 5, равно нулю. При этом корректирующее напряжение на вход алгоритмически реализованного в процессоре 29 суммирующего устройства не подается. Реально вследствие наличия вредных моментов по оси вращения 1, даже при задании угловой скорости ω=const, платформа движется неравномерно и имеется нестабильность задаваемой угловой скорости вращения, поэтому акселерометры 5 измеряют сигнал, пропорциональный небольшой величине углового ускорения е, обусловленного данной нестабильностью. Корректирующие сигналы описанным выше образом подаются на алгоритмически организованный сумматор. Таким образом, управление в низкоскоростном режиме осуществляется от ДУС 7 и тангенциальных акселерометров 5.
Во втором режиме - при задании угловых скоростей от 30 до 1200°/с стенд работает следующим образом.
При переходе на высокоскоростной режим работы компьютер подает команды на выключение питания ДУС 7, т.е. питания гиромотора 14, датчика угла ДУ 15 и всего тракта ДУС 7 - предварительного усилителя ПУ7, усилителя мощности УМ7, АЦП7, ЦАП7. Остается включенным тракт тангенциальных акселерометров 5, т.е. включены предварительные усилители ПУ2, ПУ4, ПУ6, усилители мощности УМ2, УМ4, УМ6, АЦП2, АЦП4, АЦП6, ЦАП2, ЦАП4, ЦАП6, а также процессор 29. Подается питание на тракт центростремительных акселерометров 6, т.е. на предварительные усилители ПУ1, ПУ3, ПУ5, усилители мощности УM1, УМ3, УМ5, АЦП1, АЦП3, АЦП5, ЦАП1, ЦАПЗ, ЦАП5.
Оператор через управляющий компьютер 33 подает команду на задание угловой скорости выбранной величины, принадлежащей высокоскоростному режиму работы стенда. Описанным выше образом начинается вращение платформы стенда.
На выходах датчиков угла акселерометров 6 возникают напряжения, которые через предварительные усилители ПУ1, ПУ3, ПУ5 и АЦП1, АЦП3, АЦП5 поступают в процессор 29, корректируются и через ЦАП1, ЦАП3, ЦАП5 подаются на усилители мощности УM1, УМ3, УМ5.
На выходах усилителей мощности УМ1, УМ3 и УМ5 блока усилителей мощности 34 возникает ток, который подается в обмотки соответствующих датчиков момента акселерометров 6, таким образом замыкаются цепи обратной связи акселерометров 6. Поскольку оси чувствительности акселерометров 6 ориентированы вдоль радиуса R2 платформы 8, т.е. на чувствительный элемент акселерометров 6 действует центростремительное линейное ускорение  (ускорение силы тяжести (g) не дает выходного сигнала из-за принятой ориентации осей чувствительности акселерометров), то в соответствии с известным принципом работы маятникового акселерометра с обратной связью справедливо соотношение:
(ускорение силы тяжести (g) не дает выходного сигнала из-за принятой ориентации осей чувствительности акселерометров), то в соответствии с известным принципом работы маятникового акселерометра с обратной связью справедливо соотношение:
где m·l - маятниковость (г·см), kдм - крутизна характеристики датчика момента 12 акселерометра, ioc - ток в цепи обратной связи акселерометра.
Отсюда  - при действии одного g.
- при действии одного g.
При действии  ток обратной связи равен:
ток обратной связи равен:
Процессор 29 по информации, поступающей в его порт ПВВ1, в виде кода, пропорционального квадрату измеренной акселерометрами 6 (1ц, 2ц, 3ц) угловой скорости вращения платформы стенда, вычисляет угловую скорость ω.
Акселерометры 5 (1τ, 2τ, 3τ) измеряют первую производную от угловой скорости вращения платформы, т.е. неравномерность углового вращения платформы, возникающую вследствие действующих по оси 1 вредных моментов.
В процессоре 29, в котором алгоритмически реализованы цифровые регуляторы систем обратной связи акселерометров 5 (1τ, 2τ, 3τ) и 6 (1ц, 2ц, 3ц), осуществляется суммирование кодов, пропорциональных измеренным каждым акселерометром угловой скорости и углового ускорения вращения платформы стенда, по заданному алгоритму осуществляется суммирование и вычисление среднего значения измеренной угловой скорости, код, пропорциональный этому значению, поступает на вход сумматора, алгоритмически реализованного в процессоре 29, где сравнивается с кодом, пропорциональным задаваемой угловой скорости, поступающим с управляющего компьютера 33.
Вырабатывается код, пропорциональный разностному сигналу между заданным значением угловой скорости и измеренным акселерометрами, соответствующий сигнал управления отрабатывается двигателем стенда, чем обеспечивается равенство заданной и измеренной, т.е. фактически обеспечиваемой при вращении платформы стенда угловой скорости.
Таким образом, на алгоритмически реализованное в управляющем процессоре 29 суммирующее устройство через порты ввода-вывода поступают следующие коды:
- от управляющего компьютера 33 код, пропорциональный задаваемой угловой скорости ω0, в обоих режимах работы стенда;
- от измерительного ДУС 7 - код, пропорциональный измеренной угловой скорости вращения платформы ω, в первом режиме работы;
- от акселерометров 6, измеряющих центростремительное ускорение точек их крепления к платформе стенда, - код, пропорциональный измеренной угловой скорости вращения платформы ω, во втором режиме работы;
- от акселерометров 5, измеряющих тангенциальное ускорение точек их крепления к платформе стенда, - код, пропорциональный угловому ускорению вращения платформы, для коррекции измерительных сигналов в первом и во втором режимах работы.
В сумматоре происходит сравнение кодов, пропорциональных измеренной угловой скорости ω, с кодом, пропорциональным заданной угловой скорости ω0, разностный сигнал поступает из процессора 29 через шину ЦАП 42 в ЦАП8 блока цифроаналоговых преобразователей 35, откуда в виде аналогового напряжения - на вход предварительного усилителя 36 усилителя мощности УМ8 блока усилителей мощности 34 и на обмотки управления двигателя ДП-ДБ, о чем было сказано выше.
С углового энкодера 45 через первый преобразователь сигнала (ПС1) 44 последовательность импульсов, число которых пропорционально углу поворота платформы стенда, поступает в четвертый порт ввода-вывода ПВВ 4 32 управляющего процессора 29. В процессоре 29 происходит вычисление угловой скорости стенда как отношения измеренного угла ко времени опроса, измеряемого таймером процессора 29. Использование таймера управляющего процессора, а не управляющего компьютера связано с тем, что, как правило, в управляющем компьютере используются операционные системы, не являющиеся системами реального времени, а поэтому не обеспечивающие необходимую точность отсчета временных интервалов для вычисления угловой скорости вращения платформы стенда. Вычисленное значение угловой скорости поступает в третий порт ввода-вывода 32, а оттуда - в управляющий компьютер 33.
В компьютер 33 с порта ввода-вывода ПВВ3 32 процессора 29 поступает информация об измеренной чувствительными элементами угловой скорости, формирование осредненного измеренного значения в первом и втором режимах работы стенда описано выше. В управляющем компьютере 33 по выбранным алгоритмам происходит формирование уточненного среднего значения измеренной угловой скорости - на основании среднего значения, полученного по информации чувствительных элементов и поступившего из процессора 29, и значения, измеренного угловым энкодером 45.
С испытуемого прибора (ИП) 4 через второй преобразователь сигнала (ПС2) 43 информация об угловой скорости, измеренной испытуемым прибором 4, поступает в управляющий компьютер 33.
Масштабный коэффициент испытуемого прибора 4 вычисляется в управляющем компьютере путем деления выходной информации испытуемого прибора (аналогового напряжения, числа импульсов унитарного кода или кода стандартного интерфейса) на уточненное среднее значение угловой скорости, предварительно вычисленное в компьютере, для каждого из ряда задаваемых значений угловых скоростей. По полученным значениям масштабного коэффициента испытуемого прибора при задании ряда угловых скоростей в компьютере вычисляется среднее значение масштабного коэффициента испытуемого прибора, линейность характеристики масштабного коэффициента как отклонение отдельных значений масштабного коэффициента от среднего значения.
Рассмотрим работу механизма отслеживания 25, введенного с целью снижения влияния на стабильность задаваемой стендом угловой скорости трения шарикоподшипниковых опор 2 и трения в коллекторе 24.
В предлагаемом стенде суммарный момент сопротивления по оси вращения платформы 3 не превышает 2-3 г·см, тогда как в случае традиционной конструкции платформы без механизма отслеживания данная величина составляет 50 г·см и более. Уменьшение момента сопротивления шарикоподшипниковых опор 2 достигнуто за счет их разгрузки путем введения ленточного торсиона 19. Исключение влияния момента сопротивления коллектора 24 достигнуто за счет того, что питание к подвижным элементам стенда, закрепленным на валу 1, осуществляется через упругий торцевой токоподвод 23, имеющий угол взаимного относительного разворота подвижной колодки относительно неподвижной ±4°, чему соответствует закручивание золотых проводников, дающее суммарный момент, имеющий порядок десятых долей г·см.
Коллектор 24 смонтирован на своих опорах 22, момент сопротивления коллекторных щеток при перемещении относительно токоведущих колец коллектора и момент сопротивления опор 22 преодолеваются шаговым двигателем механизма отслеживания 25 и к валу 1 не приложены. Величина и характер действующих моментов подробно описаны в [8, 15].
Работа механизма отслеживания 25 осуществляется следующим образом. Пусть двигатель 18 приложил к валу 1 (при поступлении соответствующего управляющего сигнала) момент М. Вал 1 поворачивается, вследствие чего торец «А» трубчатой части вала 1 с жестко закрепленным на конце «А» нижним концом ленточного торсиона поворачивается; конец торсиона, жестко связанный со стержнем 20, пока неподвижен, т.е. торсион закручивается на угол не более чем 4°.
При развороте вала на угол плюс 4 или минус 4 градуса замыкается, соответственно, левый или правый геркон 27 вследствие того, что магнит 28, закрепленный на верхней колодке токоподвода 23, вращающийся вместе с валом 1, оказывается над контактами соответствующего геркона, что вызывает замыкание контактов геркона (ЛКГ или ПКГ). Сигнал с герконов 27 поступает в БУМО 40, где формируется алгоритм управления, запрограммированный в микроконтроллере 31. В зависимости от направления вращения стенда сигнал с герконов ЛКГ или ПКГ 27 поступает соответственно на первый или второй входы микроконтроллера 31 БУМО 40. С первого, второго, третьего и четвертого выходов микроконтроллера 31 на первый, второй, третий и четвертый входы драйвера управления 47 поступают импульсы управления обмотками шагового двигателя механизма отслеживания 25. Микроконтроллер 31 определяет направление вращения и количество шагов шагового двигателя механизма отслеживания 25. Драйвер управления 47 формирует коммутацию обмоток шагового двигателя, и сигналы с первого, второго, третьего и четвертого выходов драйвера управления 47 поступают на первый, второй, третий и четвертый входы усилителя мощности 48 соответственно, а оттуда - на соответствующие обмотки управления шагового двигателя механизма отслеживания 25. Одновременно информация о знаке и угле поворота передается в управляющий процессор 29.
Задающей осью является вал 1 (со всеми закрепленными на нем элементами). Отслеживающей осью является ось вращения втулки 21 со всеми закрепленными на ней деталями. Таким образом, обеспечивается режим «слежения» за совпадением углового положения обеих осей: оси вала 1 (в шарикоподшипниках 2) и оси вращения коллекторной втулки 24 (в шарикоподшипниках 22). Это позволяет обеспечивать подвод питания к элементам, закрепленным на валу 1, через безмоментный упругий токоподвод 23, допускающий угол взаимного разворота колодок не более ±4°, т.е. исключить влияние момента сопротивления коллектора 24 на ось вращения вала 1.
В процессе «слежения» за осью вала 1 ленточный торсион 19 закручивается при начале движения оси 1 и раскручивается в процессе разворота оси вращения коллектора. Этот момент, как было показано выше, незначительный. Разгрузка опор 2 вала 1 обеспечивается за счет натяжения торсиона 19, передающего вес платформы 3 с испытуемым прибором 4 через стержень 20 на шарикоподшипники 22 оси вращения коллектора. Возникающий при этом дополнительный момент сопротивления шарикоподшипников 22 «парируется» тем же шаговым двигателем механизма отслеживания 25.
В качестве двигателя в механизме отслеживания 25 выбран шаговый двигатель с электронным управлением, т.к. такие двигатели имеют большой момент на валу, высокую точность и останавливаются в момент окончания управляющего импульса, причем имеют магнитную фиксацию этого положения. Для любого другого типа двигателя механизма отслеживания возникает проблема его останова. На частоте в 1000 Гц такие шаговые двигатели работают без значительных вибраций. Тем не менее, для полного исключения влияния на стенд вибраций шагового двигателя механизм отслеживания 25 устанавливается на амортизирующую прокладку 26.
С учетом управления режимами работы механизма отслеживания 25 от микроконтроллера 31 БУМО 40 возможна реализация и второго «синхронного» режима работы. В этом случае микроконтроллер 31 следит за скоростью срабатывания герконов 27 и увеличивает скорость вращения вала шагового двигателя. Эта скорость может корректироваться по значению скорости, вычисленной в процессоре 29 и переданной через пятый порт ввода-вывода ПВВ5 32 в микроконтроллер 31 БУМО 40.
В этом случае шаговый двигатель механизма отслеживания 25 вращается синхронно с валом 1 стенда, который вращается двигателем ДП-ДБ 18. В случае «запаздывания» или «опережения» по скоростям вращения обеих систем в работу вступают герконы 27, работа которых описана выше.
Обоснование точностных характеристик стендов с применением в качестве инерциальных чувствительных элементов кварцевых маятниковых акселерометров приведено в [8, 10, 15].
На фиг.6 представлена структурная схема предлагаемого стенда, работающего в первом режиме, рассмотренного как аналоге, - цифровая система автоматического управления. Цифрами обозначены функциональные элементы системы в соответствии с обозначениями на фиг.1 и 4. Введены следующие обозначения:
Iα=1000 г·см·с2 - момент инерции траверсы 1 стенда с закрепленными на ней платформами 3 и 8 и приборами 4, 5, 6, 7;
nα=40 г·см·с - момент скоростного демпфирования траверсы 1 стенда;
Iβ1=0.286 г·см·с2 - момент инерции гироузла измерительного ДУС 7 - чувствительного элемента стенда;
nβ1=35 г·см·с - момент жидкостного демпфирования измерительного ДУС 7 - чувствительного элемента стенда;
Н=65 г·см·с - кинетический момент измерительного ДУС 7 - чувствительного элемента стенда;
mlτ=mlц=0.15 г·см/g - маятниковость прецизионного кварцевого маятникового акселерометра - ЧЭ стенда (τ - тангенциального, ц - центростремительного);
Rτ=Rц=0.17 м - радиус крепления акселерометра на платформе стенда;
g=9.8 м/с2 - ускорение свободного падения;
Jτ=Jц=1.2·10-4 г·см·с2 - момент инерции подвижной части кварцевого
маятникового акселерометра;
nτ=nц=0.05 г·см·с - момент газового демпфирования кварцевого маятникового акселерометра;
cτ=сц=1.6 г·см/рад - угловая жесткость кварцевой пластины акселерометра;
 - коэффициент передачи датчика угла 15 измерительного ДУС 7 - чувствительного элемента стенда;
- коэффициент передачи датчика угла 15 измерительного ДУС 7 - чувствительного элемента стенда;
 - коэффициент передачи датчика момента 16 измерительного ДУС 7 - чувствительного элемента стенда;
- коэффициент передачи датчика момента 16 измерительного ДУС 7 - чувствительного элемента стенда;
 - оператор дифференцирования по Лапласу;
- оператор дифференцирования по Лапласу;
WУM8 (s) - передаточная функция усилителя мощности (УМ8) блока усилителей мощности 34;
WУM7 (s) - передаточная функция усилителя мощности (УМ7) блока усилителей мощности 34;
 - передаточная функция усилителей мощности 2,4,6 блока усилителей мощности 34 в цепи обратной связи тангенциальных акселерометров 5;
- передаточная функция усилителей мощности 2,4,6 блока усилителей мощности 34 в цепи обратной связи тангенциальных акселерометров 5;
КПУ7=36,54 (безразм.) - коэффициент передачи предварительного усилителя (ПУ7) блока предварительных усилителей 13;
 - дискретная передаточная функция корректирующего контура измерительного ДУС, реализованная алгоритмически в ядре 31 процессора 29;
- дискретная передаточная функция корректирующего контура измерительного ДУС, реализованная алгоритмически в ядре 31 процессора 29;
 - дискретная передаточная функция корректирующего контура цепи управления стенда, реализованная алгоритмически в ядре 31 процессора 29;
- дискретная передаточная функция корректирующего контура цепи управления стенда, реализованная алгоритмически в ядре 31 процессора 29;
 - дискретная передаточная функция i-того тангенциального акселерометра (i=2, 4, 6);
- дискретная передаточная функция i-того тангенциального акселерометра (i=2, 4, 6);
kω - коэффициент передачи канала управления по угловой скорости;
kε - коэффициент передачи канала управления по угловому ускорению;
n - коэффициент, определяющий число акселерометров в канале управления стендом;
 - коэффициент передачи датчика момента тангенциального акселерометра 5;
- коэффициент передачи датчика момента тангенциального акселерометра 5;
 - коэффициент передачи предварительного усилителя i-того тангенциального акселерометра (i=2, 4, 6) блока предварительных усилителей 13;
- коэффициент передачи предварительного усилителя i-того тангенциального акселерометра (i=2, 4, 6) блока предварительных усилителей 13;
 - коэффициент передачи датчика угла тангенциального акселерометра 5;
- коэффициент передачи датчика угла тангенциального акселерометра 5;
ωα - угловая скорость вращения платформы 3 стенда;
Mдм=kдм16·iдм - парирующий момент датчика момента измерительного ДУС 7 - чувствительного элемента стенда;
 - парирующий момент датчика момента тангенциального акселерометра 5 - чувствительного элемента стенда;
- парирующий момент датчика момента тангенциального акселерометра 5 - чувствительного элемента стенда;
 - момент, обусловленный действием углового ускорения на пластину тангенциального акселерометра 5 - чувствительного элемента стенда;
- момент, обусловленный действием углового ускорения на пластину тангенциального акселерометра 5 - чувствительного элемента стенда;
iдм - ток в цепи обратной связи измерительного ДУС 7 - чувствительного элемента стенда, пропорциональный измеряемой угловой скорости;
ωβ1 - угловая скорость прецессии гироузла измерительного ДУС 7 - чувствительного элемента стенда;
β1 - угол прецессии гироузла 14 измерительного ДУС 7 - чувствительного элемента стенда;
βτ - угол поворота чувствительного элемента тангенциального акселерометра 5 - ЧЭ стенда;
 - помеха, приведенная к углу, действующая по оси вращения чувствительного элемента тангенциального акселерометра 5 - ЧЭ стенда;
- помеха, приведенная к углу, действующая по оси вращения чувствительного элемента тангенциального акселерометра 5 - ЧЭ стенда;
βц - угол поворота чувствительного элемента центростремительного акселерометра 6 - ЧЭ стенда;
 - помеха, приведенная к углу, действующая по оси вращения чувствительного элемента центростремительного акселерометра 6 - ЧЭ стенда;
- помеха, приведенная к углу, действующая по оси вращения чувствительного элемента центростремительного акселерометра 6 - ЧЭ стенда;
 - помеха, приведенная к углу, действующая по оси прецессии измерительного ДУС 7 - ЧЭ стенда;
- помеха, приведенная к углу, действующая по оси прецессии измерительного ДУС 7 - ЧЭ стенда;
 - помеха, приведенная к углу, действующая по оси прецессии ДУС 4 - испытуемого прибора;
- помеха, приведенная к углу, действующая по оси прецессии ДУС 4 - испытуемого прибора;
Uду15 - переменное напряжение на выходе датчика угла 15 измерительного ДУС 7 - чувствительного элемента стенда;
 - переменное напряжение на выходе датчика угла тангенциального акселерометра 5 - ЧЭ стенда;
- переменное напряжение на выходе датчика угла тангенциального акселерометра 5 - ЧЭ стенда;
у1 - напряжение на выходе предварительного усилителя 7 блока предварительных усилителей 13 в цепи обратной связи измерительного ДУС 7 - чувствительного элемента стенда;
u1 - управляющее напряжение с выхода ЦАП7 блока ЦАП 35 в цепи обратной связи измерительного ДУС 7 - чувствительного элемента стенда;
уτ - напряжение на выходе предварительных усилителей 2, 4, 6 блока предварительных усилителей 13 в цепи обратной связи тангенциального акселерометра 5 - чувствительного элемента стенда (так как акселерометры идентичны по своим выходным характеристикам, то для данного параметра введено единое обозначение);
uτ - управляющее напряжение с выхода ЦАП 2, 4, 6 блока ЦАП 35 в цепи обратной связи тангенциального акселерометра 5 - чувствительного элемента стенда (так как акселерометры идентичны по своим выходным характеристикам, то для данного параметра введено единое обозначение);
iдмτ - ток в цепи обратной связи тангенциального акселерометра 5 - чувствительного элемента стенда;
Uзад - задающее воздействие, поступающее в виде кода в третий порт ввода-вывода ПВВЗ 32 управляющего процессора 29 от управляющего компьютера 33;
е - разностный сигнал ошибки управления;
uст - управляющее напряжение с выхода ЦАП8 блока цифроаналоговых преобразователей 35 в цепи обратной связи стенда;
М∂в - момент, формируемый двигателем бесконтактным (ДБ) 11 стенда;
Мα - момент сопротивления по оси вращения траверсы 1 стенда;
Мω=Н·ωβ1 - гироскопический момент измерительного ДУС 7 - чувствительного элемента стенда.
При синтезе цифрового регулятора использовались методы LQD - оптимизации и цифровой фильтрации теории синтеза дискретных систем управления [7, 12, 13], а при синтезе корректирующих контуров аналоговой части системы управления стендом - методы классической теории автоматического управления [3, 4]. Численные значения параметров взяты как пример для реального образца стенда, измерительного ДУС 7 и кварцевых маятниковых акселерометров 5 и 6, измеряющих соответственно тангенциальное и центростремительное ускорения точек их крепления к платформе стенда. С учетом приведенных параметров передаточные функции системы управления стендом имеют вид:
Тру1=1.19·10-3 с, Тру2=0.188·10-3 с, Тру3=0.45·10-3 с, Тум1=12.9·10-3 с, Тум2=1.0·10-3 с, 

Дискретные передаточные функции цифрового регулятора для частот опроса 10 кГц записываются в форме z-передаточных функций.



Соответствующий разностный алгоритм для вычисления управления u1(i) цепи управления измерительным ДУС 7 - ЧЭ стенда на текущем i-м такте дискретности будет иметь вид:
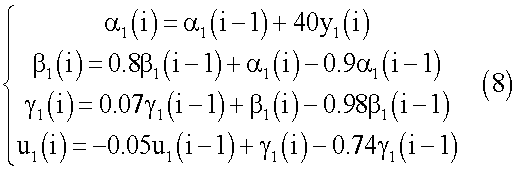
где α1, β1, γ1 - некоторые вспомогательные переменные. Причем для начального такта (i=0) следует принять: u1(-1)=α1(-1)=β1(-1)=γ1(-1)=0.
Разностный алгоритм для вычисления управления uτ(i) цепи управления тангенциальным акселерометром 5 на текущем i-м такте дискретности будет иметь вид:

где ατ, βτ - вспомогательные переменные, и для начального момента (i=0) следует принять: uτ(-1)=uτ(-2)=ατ(-1)=βτ(-1)=βτ(-2)=0. Этот же алгоритм остается справедливым (после замены индекса «τ» на индекс «ц») для вычисления управления uц(i) во 2-м режиме.
Закон управления контуром стабилизации имеет вид:

- в первом режиме;

- во втором режиме.
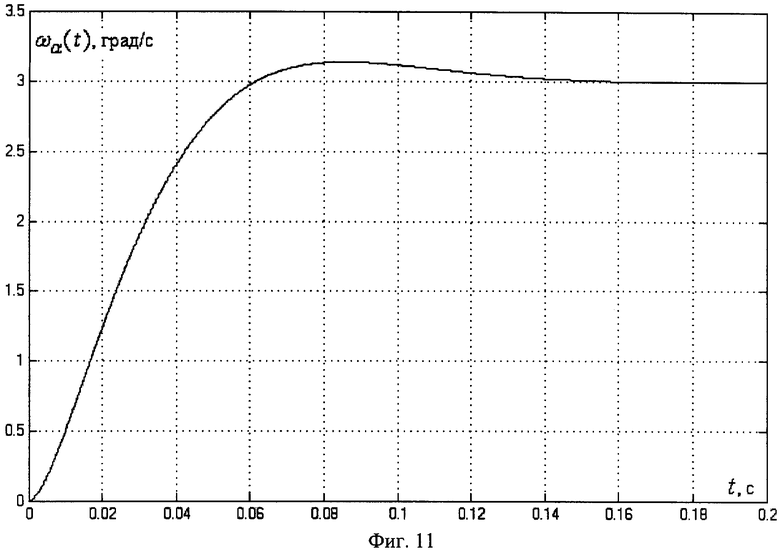
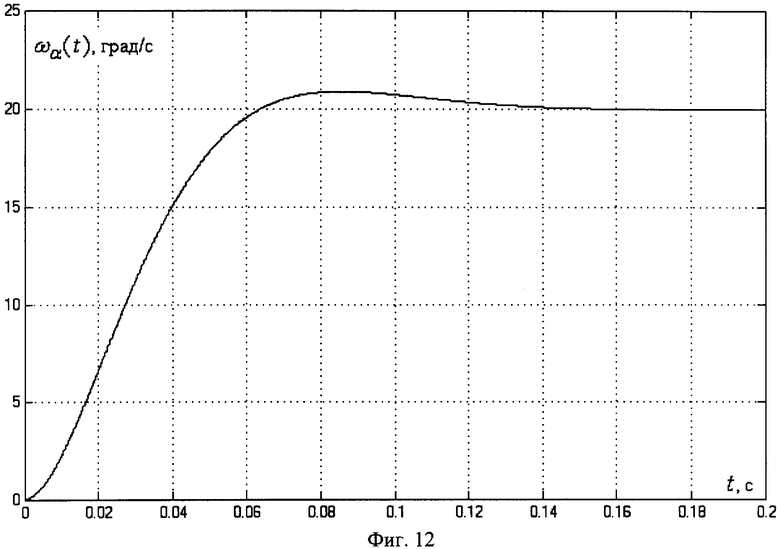
Алгоритмы (8), (9), (10), (11) программируются в процессоре 29. Графики частотных характеристик и переходных процессов, полученных в результате математического моделирования, приведены на фиг.8-12.
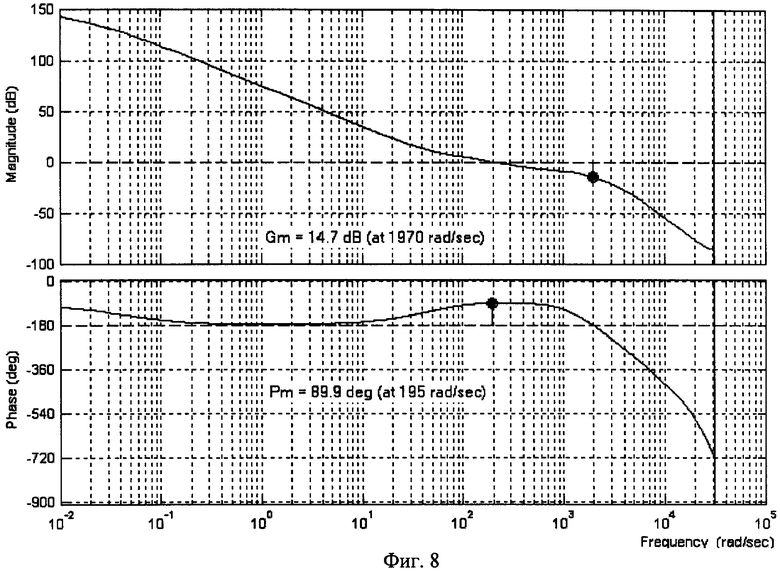
На фиг.8 приведены ЛАЧХ и ЛФЧХ разомкнутой системы предлагаемого стенда в первом режиме работы. Из графика видно, что запас по амплитуде и фазе составляют 14,7 дБ и 89,9° соответственно.
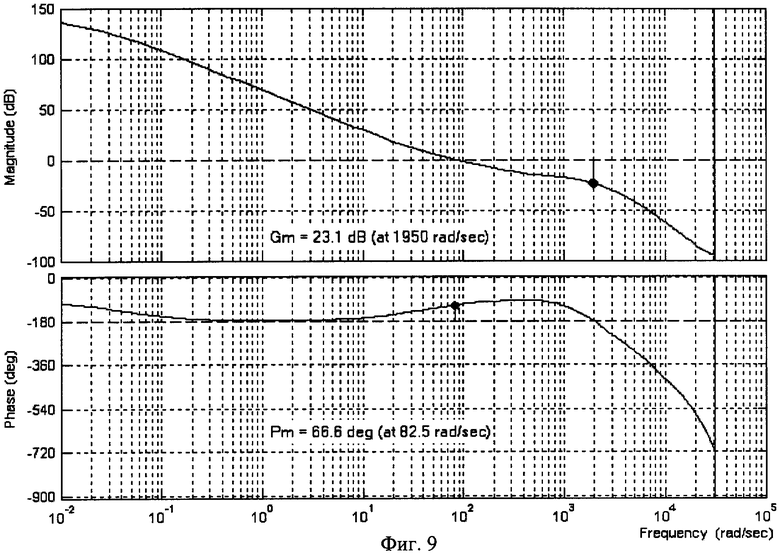
На фиг.9 приведены ЛАЧХ и ЛФЧХ разомкнутой системы предлагаемого стенда во втором режиме работы. Из графика видно, что запас по амплитуде и фазе составляют 23,1 дБ и 66,6° соответственно.
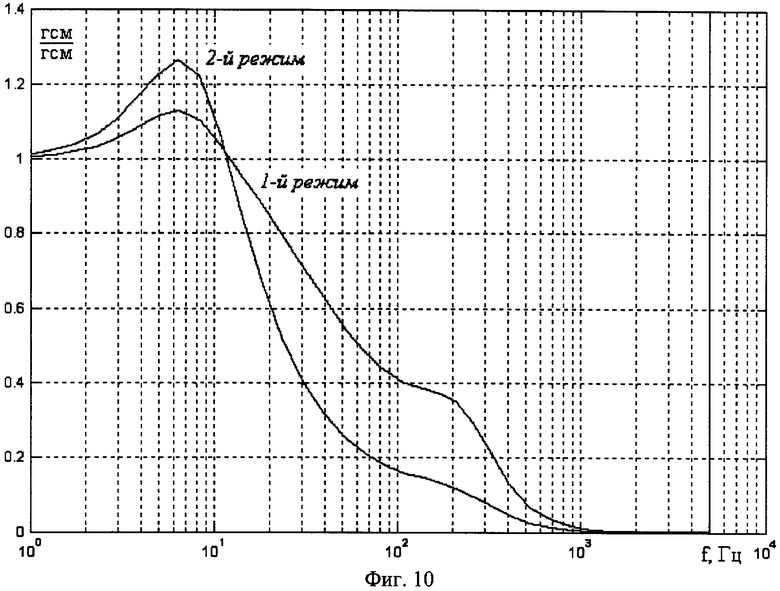
На фиг.10 приведены АЧХ замкнутой системы  предлагаемого стенда в первом и во втором режимах работы. Видно, что показатель колебательности не превышает величины 1.1 в первом и 1.3 - во втором режимах работы, а полоса пропускания - не ниже 30 Гц в первом и 15 - во втором режимах.
предлагаемого стенда в первом и во втором режимах работы. Видно, что показатель колебательности не превышает величины 1.1 в первом и 1.3 - во втором режимах работы, а полоса пропускания - не ниже 30 Гц в первом и 15 - во втором режимах.
Частотные характеристики приведены для частоты опроса 10 кГц.
На фиг.11 и 12. приведены переходные процессы по угловой скорости предлагаемого стенда в первом и во втором режимах работы соответственно при частоте опроса 10 кГц. Из графиков видно, что перерегулирование не превышает 5%, а время регулирования - величины 0.16 с. Установившееся значение угловой скорости при подаче на вход 1 В постоянного напряжения составляет 3°/с - в первом и 20°/с - во втором режимах работы.
Таким образом, предлагаемый стенд обладает следующими основными техническими характеристиками:
Литература.
1. Ахмеджанов А.А. Системы передачи угла повышенной точности. - М.-Л.: Энергия, 1966.
2. Балашова А.А., Никитин Е.А. Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров. - М.: Машиностроение, 1969.
3. Бессекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1975. - 767 с.
4. Бессекерский В.А., Фабрикант Е.А. Динамический синтез систем гироскопической стабилизации. - Л.: Судостроение, 1968. - 351 с.
5. Высокоточные преобразователи угловых перемещений / Под ред. А.А.Ахметжанова - М.: Энергоатомиздат, 1986.
6. Гироскопические системы. Ч. III Элементы гироскопических приборов. Под ред. Д.С.Пельпора. - М.: Высшая школа, 1972.
7. Изерман Р. Цифровые системы управления: Пер. с англ. - М.: Мир, 1984. - 541 с.
8. Калихман Д.М. Основы проектирования управляемых оснований с инерциальными чувствительными элементами для контроля гироскопических приборов. - Саратов: Изд.-во Сарат. Гос. Техн. Университета, 2001. - 336 с.
9. Калихман Д.М. Прецизионная установка для воспроизведения угловых скоростей. // Измерительная техника. 2001. - №4. - С.25-28.
10. Калихман Д.М. Прецизионные стенды для контроля датчиков угловых скоростей на основе акселерометров линейных ускорений // Изв. вузов. Приборостроение. 2001. - №4, Т. 44. - С.18-23.
11. Калихман Д.М., Нахов С.Ф. Одноосный широкодиапазонный вращающийся стенд с инерциальными чувствительными элементами // Гироскопия и навигация. 2001. - №2. - С.79-89.
12. Куо Б. Теория и проектирование цифровых систем управления. - М.: Машиностроение, 1986. - 448 с.
13. Садомцев Ю.В. Конструирование систем управления с обратной связью по критериям точности и грубости. - Саратов: Изд.-во Сарат. Гос. Техн. Университета, 2003. - 206 с.
14. Патент №2075042, приоритет от 11.05.1993. Устройство для контроля датчиков угловой скорости / Калихман Д.М., Калихман Л.Я., Улыбин В.И., Сновалев А.Я., Чурилин Ю.С.(Россия). Зарегистрир. в Гос. реестре изобр. 10.03.97. // Б.И. 1997.
15. Патент RU 2142643 C1, 6 G01P 21/00, приоритет от 10.07.1996. Широкодиапазонный стенд для контроля измерителей угловых скоростей / Калихман Д.М., Калихман Л.Я., Калдымов Н.А. и др. Зарегистрир. в Гос. реестре изобр. 10.12.99. // Б.И. 1999.
16. Фабрикант Е.А., Журавлев Л.Д. Динамика следящего привода гироскопических стабилизаторов. - М.: Машиностроение, 1984. - 248 с.
17. Хрущев В.В. Электрические машины систем автоматики. - Л.: Энергоиздат, 1985. - с.4-11, 324.
18. Юферов Ф.М. Электрические машины автоматических устройств. - М.: Высшая школа, 1976, с.302.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |


Изобретение относится к измерительной технике и предназначено для испытаний измерителей угловых скоростей различного назначения. Технический результат - расширение функциональных возможностей. Для достижения данного результата в системе управления двигателем стенда реализовано сравнение величины угловой скорости вращения платформы, измеренной инерциальными измерителями, с величиной угловой скорости, заданной управляющим компьютером. Отсутствие в конструкции стенда редуктора, наличие компьютера и процессора обеспечивает возможность воспроизведения требуемых законов изменения угловой скорости. Кроме того, для повышения точности измерения угловой скорости вращения платформы на ее оси закреплен угловой энкодер, информация которого вводится в управляющий компьютер. Процессор содержит 3-фазный шестнадцатиразрядный ШИМ-генератор и позволяет организовать питание гиромотора гироскопического датчика угловой скорости без применения дополнительного статического преобразователя. 2 з.п. ф-лы, 12 ил.
1. Широкодиапазонный стенд для контроля измерителей угловой скорости, содержащий корпус, вал, установленный в корпусе с возможностью вращения, закрепленную на валу основную платформу для установки измерителя угловых скоростей, электродвигатель постоянного тока, содержащий датчик положения и двигатель бесконтактный, выполненные в виде синусно-косинусных вращающих трансформаторов, причем датчик положения имеет один вход и два выхода, а двигатель бесконтактный имеет два входа; усилитель мощности электродвигателя постоянного тока, содержащий предварительный усилитель с одним входом и одним выходом и два усилителя мощности, каждый из которых имеет один вход и один выход, причем выход предварительного усилителя соединен с входом датчика положения, один выход которого соединен с входом первого усилителя мощности, а второй выход с входом второго усилителя мощности, выход каждого усилителя мощности соединен с соответствующей обмоткой двигателя бесконтактного; четыре датчика Холла и взаимодействующий с ними магнит, кольцевой коллектор, состоящий из коллекторной втулки и щеток для подвода питания, дополнительную платформу, закрепленную на валу, шесть кварцевых маятниковых акселерометров, гироскопический датчик угловой скорости, цилиндрическую втулку, стержень, ленточный торсион, упругий торцевой токоподвод, два геркона, взаимодействующий с герконами магнит, механизм отслеживания, компьютер, аналого-цифровой преобразователь, плату цифровых портов ввода-вывода, усилитель системы стабилизации с сумматором, входящим в его состав, блок управления механизмом отслеживания, причем гироскопический датчик угловой скорости и акселерометры закреплены на дополнительной платформе, оси чувствительности трех акселерометров для измерения тангенциального ускорения перпендикулярны соответствующим радиусам дополнительной платформы, а оси чувствительности трех акселерометров для измерения центростремительного ускорения ориентированы вдоль соответствующих радиусов дополнительной платформы, каждый акселерометр содержит кварцевую пластину, емкостной датчик угла и магнитоэлектрический датчик момента, соединенные последовательно через соответствующие усилители обратной связи, каждый из которых содержит предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности, гироскопический датчик угловой скорости содержит датчик угла и датчик момента, соединенные последовательно через усилитель обратной связи, содержащий предварительный усилитель, фазочувствительный выпрямитель, корректирующий контур и усилитель мощности, а ось чувствительности гироскопического датчика угловой скорости параллельна оси вала, упругий торцевой токоподвод содержит верхнюю и нижнюю гетинаксовые колодки и золотые проводники подвода питания, прикрепленные к колодкам, два геркона закреплены на нижней колодке с обеспечением угла 8° между контактами герконов, магнит закреплен на верхней колодке в среднем положении между контактами герконов, цилиндрическая втулка подвешена в корпусе на шарикоподшипниковых опорах соосно с валом, проходящим внутри цилиндрической втулки, верхняя колодка упругого торцевого токоподвода закреплена на валу, а нижняя колодка - на цилиндрической втулке, вал выполнен полым на одном участке своей длины, ленточный торсион размещен в полости вала и прикреплен нижним концом к торцу полого участка вала, а верхним концом к середине стержня, который расположен перпендикулярно оси вала, проходит через отверстия цилиндрического полого участка вала и прикреплен двумя концами к торцам цилиндрической втулки, жестко соединенной с коллекторной втулкой, механизм отслеживания содержит импульсный шаговый двигатель и зубчатую передачу, при этом шаговый двигатель прикреплен к корпусу через амортизатор, выходное звено зубчатой передачи закреплено на цилиндрической втулке соосно с ней, блок управления механизмом отслеживания имеет два входа, соединенных с герконами, и четыре выхода, соединенных с обмотками импульсного шагового двигателя, причем для регистрации угла разворота платформы в фиксированных точках четыре датчика Холла располагаются через каждые 90° на корпусе стенда, а взаимодействующий с ними магнит - на основной платформе стенда, отличающийся тем, что с целью повышения точности контроля масштабного коэффициента измерителей угловых скоростей разных типов путем более точного и стабильного задания стендом угловых скоростей, а также обеспечения возможности контроля динамических характеристик ДУС за счет расширения функциональных возможностей стенда, а именно, возможности задания угловых скоростей, изменяющихся по любому закону, заданному программным способом, возможности высокоточного измерения угла поворота платформы во всем диапазоне задаваемых угловых скоростей, а также возможности изменения структуры регулятора и динамических свойств системы управления стендом путем перепрограммирования в случае необходимости цифровой части регулятора в управляющем процессоре, в систему управления стендом введены семь аналого-цифровых и восемь цифроаналоговых преобразователей, информационная шина цифроаналоговых преобразователей, информационная шина аналого-цифровых преобразователей, трехфазный усилитель мощности, процессор, содержащий в том числе модуль широтно-импульсного формирования напряжения питания гиромотора и пять портов ввода-вывода, при этом входы первого, третьего и пятого аналого-цифровых преобразователей соединены с выходами первого, третьего и пятого предварительных усилителей цепей обратной связи соответствующих акселерометров, измеряющих центростремительное ускорение точек их крепления к платформе стенда, а входы второго, четвертого и шестого аналого-цифровых преобразователей с выходами второго, четвертого и шестого предварительных усилителей цепей обратной связи соответствующих акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда, вход же седьмого аналого-цифрового преобразователя соединен с выходом предварительного усилителя цепи обратной связи измерительного датчика угловой скорости, входы первого, третьего и пятого предварительных усилителей соединены с выходами датчиков угла соответствующих акселерометров, измеряющих центростремительное ускорение точек их крепления к платформе стенда, входы второго, четвертого и шестого предварительных усилителей соединены с выходами датчиков угла соответствующих акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда, вход седьмого предварительного усилителя соединен с выходом датчика угла измерительного ДУС, а выходы всех аналого-цифровых преобразователей соединены с информационной шиной аналого-цифровых преобразователей, выход которой соединен с первым портом ввода-вывода управляющего процессора, в котором реализованы алгоритмическим способом устройства фазочувствительного выпрямления, корректирующие контуры систем управления измерительным датчиком угловой скорости и шестью кварцевыми маятниковыми акселерометрами, измеряющими тангенциальное и центростремительное ускорения точек их крепления к платформе стенда, а также устройство формирования разностного сигнала и корректирующий контур системы управления двигателем стенда, причем три выхода широтно-импульсного формирователя напряжения, встроенного в управляющий процессор, соединены с тремя входами трехфазного усилителя мощности, три выхода которого соединены с каждой из трех соответствующих обмоток трехфазного синхронного гистерезисного двигателя гиромотора измерительного датчика угловой скорости; второй порт ввода-вывода управляющего процессора соединен с информационной шиной цифроаналоговых преобразователей, причем вход каждого цифроаналогового преобразователя соединен с соответствующим выходом информационной шины цифроаналоговых преобразователей, а выходы первого, третьего и пятого цифроаналоговых преобразователей соединены соответственно с входами первого, третьего и пятого усилителей мощности цепей обратной связи соответствующих акселерометров, измеряющих центростремительное ускорение точек их крепления к платформе стенда, выходы второго, четвертого и шестого цифроаналоговых преобразователей соединены соответственно с входами второго, четвертого и шестого усилителей мощности цепей обратной связи соответствующих акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда, выход седьмого цифроаналогового преобразователя соединен с входом усилителя мощности цепи обратной связи измерительного датчика угловой скорости, причем выходы всех усилителей мощности соединены соответственно с датчиками моментов акселерометров, измеряющих тангенциальное и центростремительное ускорения точек их крепления к платформе стенда и измерительного датчика угловой скорости, выход восьмого цифроаналогового преобразователя соединен с входом предварительного усилителя, входящего в состав усилителя мощности электродвигателя постоянного тока стенда.
2. Устройство по п.1, отличающееся тем, что управляющий компьютер находится в режиме обмена через стандартный интерфейс с третьим портом ввода-вывода управляющего процессора в системе управления стенда, а цифроаналоговые и аналогово-цифровые преобразователи могут быть как встроенными в процессор, работающий в обратной связи стенда, так и быть по отношению к нему внешними устройствами, причем электронные блоки, процессорные модули и устройства преобразования сигнала реализованы в виде плат, крепящихся непосредственно на корпусе стенда.
3. Устройство по п.1 или 2, отличающееся тем, что в качестве измерителя угла на оси вращения траверсы стенда применен угловой энкодер, считывающие оптические головки которого через преобразователь сигнала соединены с четвертым портом ввода-вывода процессора в системе управления стенда, причем для съема информации применена пара считывающих оптических головок, расположенных под углом 180°, для исключения влияния эксцентриситетов крепления энкодера на выходную информацию об угловом положении платформы стенда, а испытуемым прибором может быть измеритель угловой скорости любого класса и принципа действия, выход которого через преобразователь сигнала соединен с портом ввода-вывода управляющего компьютера, а преобразователь сигнала представляет собой универсальное устройство, преобразующее информацию в виде аналогового сигнала или дискретного сигнала в код стандартного интерфейса используемого компьютера, причем выходы левого и правого герконов, закрепленных на нижней колодке упругого торцевого токоподвода, соединены соответственно с первым и вторым входом микроконтроллера, входящего в состав блока управления механизмом отслеживания стенда, состоящего из микроконтроллера, драйвера управления и усилителя мощности, а четыре выхода микроконтроллера соединены с четырьмя входами драйвера управления, четыре выхода которого соединены с четырьмя входами усилителя мощности, четыре выхода которого, в свою очередь, соединены с четырьмя соответствующими обмотками шагового двигателя механизма отслеживания стенда, порт ввода-вывода микроконтроллера соединен с пятым портом ввода-вывода управляющего процессора, при этом микроконтроллер находится в режиме обмена с процессором через стандартный интерфейс.
| RU 2075042 C1, 11.05.1993 | |||
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Калихман Д.М | |||
| Основы проектирования управляемых оснований с инерциальными чувствительными элементами для контроля гироскопических приборов | |||
| - Саратов: Изд-во Сарат | |||
| Гос | |||
| Техн | |||
| Университета, 2001 | |||
| с.336 | |||
| US 3883812 А, 13.05.1975 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |

