Изобретение относится к области решения задач вибрационной защиты машин, оборудования и аппаратуры.
Динамическое гашение колебаний является достаточно распространенным физическим явлением в динамике механических колебательных системах с двумя и более степенями свободы, что обеспечивается соответствующим выбором структуры системы, места приложения внешних воздействий, особенностями межпарциальных связей и значений параметров элементов. Теоретические аспекты динамического гашения колебаний и возможные технические приложения подробно рассмотрены в работах [1-3]. Динамическое гашение колебаний можно отнести к числу актуальных научно-технических проблем современного машиноведения и машиностроения.
При всей разработанности теории вибрационной защиты машин, оборудования и аппаратуры многие вопросы приложения теоретических положений к созданию мультигасителей колебаний развиты в меньшей степени.
В процессе патентного поиска выявлены изобретения, посвященные реализации режимов динамического гашения колебаний для объектов, имеющих несколько степеней свободы и осуществляющих взаимодействия в виброзащитных системах, содержащих в своем составе дополнительные элементы, механизмы и устройства для преобразования движения.
Известен способ виброзащиты машин [Устинов Ю.Ф., Иванов В.П., А.В. Скрынников, «Способ виброзащиты машин», патент №2453746 C2, МПК F16F 15/08, F16F 3/08, F16F 1/52, приоритет 20.06.2012], включающий соединение защищаемого объекта с ее рамой посредством типовых резинометаллических виброизоляторов, состоящих из двух косоразмещенных призматических упругих элементов привулканизированных к верхним и нижним металлическим пластинам, наклоненных к раме объекта, отличающийся тем, что, с целью снижения вибрации защищаемого объекта при выполнении технологических операций с изменением режима ее работы, соответственно принудительно плавно изменяют жесткость виброизоляторов путем одновременного поворота на одинаковый угол по отношению к защищаемому объекту верхних и нижних металлических пластин и привулканизированных к ним упругих призматических элементов. Нижние металлические пластины с одной стороны в шарнирах соединены с ползунами, входящими в поступательные пары с рамой. С другой стороны, нижние металлические пластины в шарнирах соединены со штоками гидроцилиндров, соединенных в шарнирах с рамой машины.
Представленный способ имеет ряд недостатков. К ним следует отнести отсутствие в конструкции устройств для автоматической регулировки жесткостных параметров. Также не рассматривается динамическое гашение колебаний по двум координатам.
Известно устройство подвески [Айсманн Й., Лангхорст Ф., Лоренц К. «Устройство подвески с рычажным механизмом Уатта с интегрированным подрессориванием/демпфированием», патент №2526542 C2, МПК B62D 24/04, B62D 33/06, приоритет 27.08.2014] для упругого/демпфирующего подвешивания материального тела (прежде всего кабины водителя грузового транспортного средства), относительно основания, прежде всего относительно шасси транспортного средства, при этом устройство подвески имеет упругую/демпфирующую структуру по меньшей мере с одним демпфирующим элементом и/или по меньшей мере с одним упругим элементом для демпфирования толчков или же колебаний, а также структуру рычажного механизма Уатта по меньшей мере с одним подвижно относительно друг друга соединяющим материальное тело и основание посредством рычага Уатта рычажным механизмом Уатта для уменьшения степени свободы перемещения материального тела относительно основания, при этом рычаг Уатта по меньшей мере одного рычажного механизма Уатта с возможностью вращения опирается на гнездо опоры материального тела или же основания, отличающееся тем, что по меньшей мере один упругий элемент и/или по меньшей мере один демпфирующий элемент упругой/демпфирующей структуры размещен в области рычага Уатта между рычагом Уатта и соотнесенным с рычагом Уатта гнездом опоры.
Недостатки рассматриваемого заключаются в исключении рассмотрения влияния приведенной жесткости на динамике системы, а также отсутствие динамического гашения колебаний по двум координатам y1 и y2.
Известно изобретение [Воробьев С.А., Кулешов А.В. «Способ демпфирования колебаний упругоподвешенного объекта», патент №2162034 C2, МПК B60G 23/00, приоритет 20.01.2001]. Способ демпфирования колебаний упругоподвешенного объекта, подвес которого содержит более двух последовательно расположенных и параллельно ориентированных амортизаторов, заключается в том, что измеряют деформацию упругих элементов амортизаторов, а затем изменяют жесткость, отличающийся тем, что измеряют скорость поступательного перемещения центра масс  и
и  угловую скорость объекта, а жесткости амортизаторов Cj изменяют по закону
угловую скорость объекта, а жесткости амортизаторов Cj изменяют по закону

j=1, N;
где  - деформация j-го упругого элемента;
- деформация j-го упругого элемента;
Cj0 - начальное значение жесткости j-го упругого элемента;
 - допустимое значение изменения жесткости j-го упругого элемента;
- допустимое значение изменения жесткости j-го упругого элемента;
 - скорость поступательного перемещения центра масс объекта;
- скорость поступательного перемещения центра масс объекта;
 - угловая скорость объекта;
- угловая скорость объекта;
ϕ - величина угла поворота объекта;
qj(t) - величина предварительной деформации j-го упругого элемента (величина кинематического воздействия);
xj - координата точки подвеса j-го упругого элемента относительно центра масс;
N - число амортизаторов подвеса.
К недостаткам данного изобретения следует отнести невнимание к учету дополнительных динамических связей и то, что демпфирование колебаний не соотносится с движениями по координатам y1 и y2, а также отсутствует динамическое гашения колебаний, в том числе одновременное по двум координатам y1 и y2.
К наиболее близкому техническому решению следует отнести устройство [Говердовский В.Н., Чанг Мен Ли «Способ вторичного подрессоривания тележки вагона высокоскоростного рельсового транспорта», патент №2597428 C1, МПК B61F 5/02, приоритет 10.09.2016]. Предлагаемый способ реализуется двухступенчатым подрессориванием тележки вагона, состоящим из первичного подрессоривания, связывающего колесную пару с рамой тележки с помощью виброзащитной системы, условно показанной в виде пружин, и вторичного подрессоривания, связывающего раму тележки с кузовом вагона и снабженного виброизолирующей системой, содержащей направляющий механизм и механизм демпфирования, из структурных элементов которых собирают кинематическую цепь для передачи движения кузова относительно рамы в заданном направлении, при этом входной и выходной структурные элементы кинематической цепи соединяют между собой с помощью упругого элемента, который выполняют, например, в виде бесштоковых пневматических пружин. В виброизолирующую систему вводится также локальную кинематическая цепь из структурных элементов, между ними и структурными элементами кинематической цепи формируются подвижные соединения, и устанавливается параллельно кинематической цепи; причем входной структурный элемент локальной кинематической цепи выполняется в виде вала 6 и шестерни конической зубчатой передачи, жестко связанных между собой, а ее выходной структурный элемент - в виде колеса конической зубчатой передачи и рычага заданной геометрии, жестко связанных между собой, при этом входной структурный элемент подвижно соединяется с рамой тележки, а выходной структурный элемент - с кузовом вагона и пружиной посредством структурного элемента, например, типа «bolster», условно показанного в виде тела качения. Далее собирается дополнительный упругий элемент в виде одного или нескольких съемных модулей, в каждом из которых пружины подвижно закрепляются между корпусом и центральной втулкой, размещенной в собственных подшипниках в корпусе, и устанавливаются винтовой механизм для настройки пружин и выбора рабочего участка регулирования их знакопеременной жесткости перед присоединением к виброизолирующей системе или в процессе обслуживания системы для перехода с одного участка на другой, затем корпус каждого модуля присоединяются к раме тележки с помощью кронштейна, а втулку - к валу с помощью муфты. Для управления параметрами пружины используется устройство, состоящее из блока отбора воздуха из пневматической сети вагона, блока подготовки воздуха и, по меньшей мере, двух каналов управления, снабженных воздушными распределителями.
К недостаткам рассматриваемого способа следует отнести отсутствие динамического гашения колебаний, в том числе одновременное по двум координатам y1 и y2.
Целью предлагаемого изобретения является обеспечение одновременного гашения колебаний по двум координатам объекта защиты.
Способ одновременного динамического гашения колебаний объекта защиты по двум степеням свободы, основанный на использовании упругих подвесов в точках опоры, связанных с устройствами для преобразования движения в виде рычажных механизмов, имеющих точку опоры на подвижном основании, отличающийся введением зубчатой передачи, формирующей устойчивые соотношения параметров взаимодействия между двумя парциальными системами, обеспечивающей динамическое гашение одновременно по двум координатам объекта при вибрациях со стороны опорной поверхности, за счет возникающих на пригрузах с дополнительными массами переносных сил инерции, динамические параметры которых корректируются за счет работы автоматической системы, имеющей датчики измерения состояния системы, устройства для обработки информации и определения управляющего сигнала, реализуемого сервоприводом, изменяющим положение пригруза относительно оси вращения зубчатого сектора.
Устройство обеспечения одновременного динамического гашения колебаний по двум координатам, состоящее из двух рычажных механизмов с размещенными на них пригрузами, перемещаемыми по длине рычага, отличающееся введением и использованием зубчатой передачи между рычажными механизмами за счет придания рычагам формы зубчатых секторов с пазами для перемещения пригрузов с дополнительными массами и сервоприводами, управляемыми от блока измерения, обработки и усиления сигналов, реализуемых сервоприводом в режимах динамического гашения колебаний одновременно по двум степеням свободы.
Устройство изменения динамической жесткости (фиг. 2) настраиваемого упругого элемента, помещенного между объектом защиты и подвижной опорой, создаваемой элементами рычажного механизма, отличающееся тем, что устройство изменения жесткости, размещаемое параллельно в тех же опорах, что и пружина, обладает свойством запирания или мгновенного увеличения динамической жесткости за счет перекрытия дросселем канала перетекания жидкости в гидравлической паре из одной полости в другую при относительных движениях, и создающее возможности для исходной виброзащитной системы переходить из динамического состояния с тремя степенями свободы к динамическому состоянию системы с одной степенью свободы.
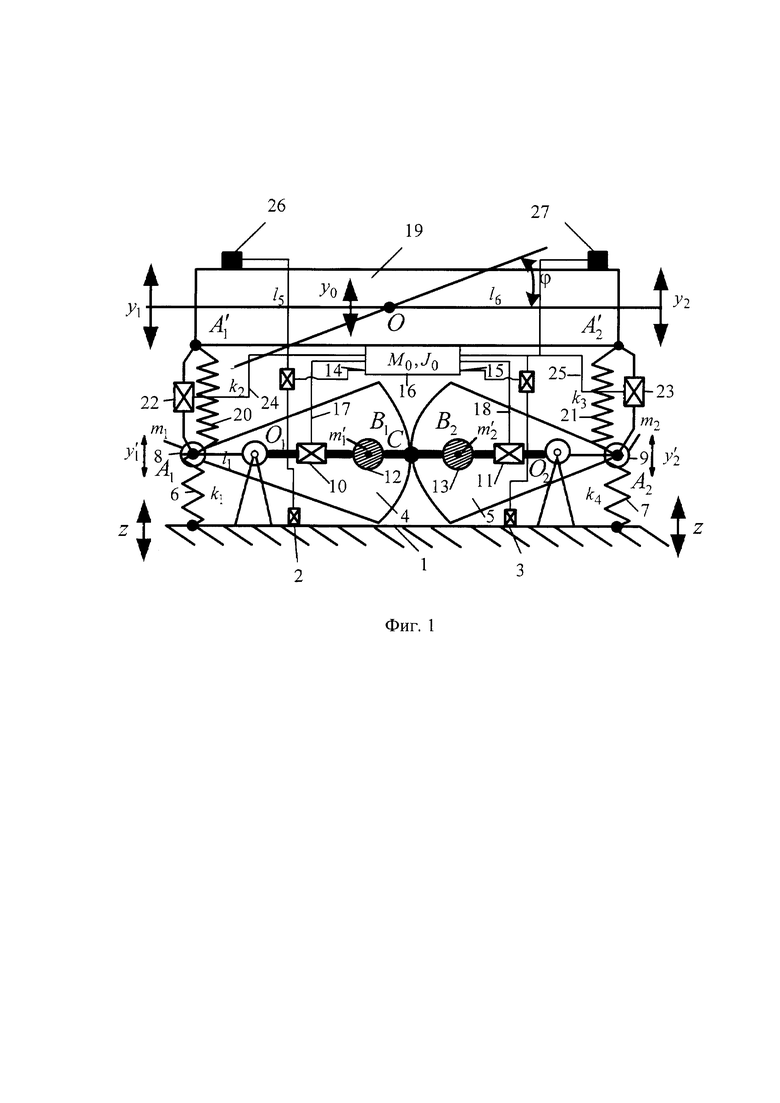
Работа виброзащитной системы (фиг. 1) осуществляется следующим образом. Движения основания 1, измеряемые датчиками 2, 3 через точки крепления O1 и O2 (фиг. 1) передаются находящимся в зацеплении зубчатым секторам 4, 5. Сектора 4 и 5 имеют соответственно радиусы r1 и r2, определяемые длинами отрезков O1C=r1 и O2C=r2, где C - точка контакта зубчатых секторов. В точках A1 и A2 зубчатые сектора опираются на упругие элементы 6, 7 с жесткостями k1 и k2 соответственно. Пружины 6, 7 связаны с основанием (опорной поверхностью) 1. В точках зубчатых секторов A1 и A2 размещаются дополнительные пригрузы 8, 9, обладающие массами m1 и m2 соответственно. Зубчатые сектора имеют пазы, по которым с помощью сервомеханизмов 10, 11, могут перемещаться пригрузы 12, 13, обладающие массами m'1 и m'2. Управляющие сигналы 14, 15 поступают из блока управления 16 по каналам 17, 18. Защищаемый объект представляет собой твердое тело 19, положение которого может определяться в двух системах координат y1 и y2 (или y0 и ϕ). Объект защиты 19 через упругие элементы 20, 21 с жесткостями k2 и k3 соответственно с системой преобразования движения в точках A1 и A2. Положение системы преобразования движений, состоящей из двух зубчатых секторов 4, 5 определяется координатой y'1 (или y'2). В целом механическая система на фиг. 1 представляет собой принципиальную схему в виде механической колебательной системы с тремя степенями свободы с внешним кинематическим возмущением z, создаваемом движениями опорной поверхности 1.
Упругие элементы 20 и 21 имеют присоединенные параллельно в точках A1 и A'1, а также в точках A2 и A'2 устройства 22, 23 для блокировки (или запирания) упругих элементов, что осуществляется управляющими сигналами 24, 25, поступающими из блока управления 16. Состояние объекта защиты (M0, J0) контролируется датчиками 26, 27.
Работа блокирующих устройств (22, 23) может быть пояснена на фиг. 2. Каждое из устройств представляет собой гидравлическую пару поршень-цилиндр. Полости цилиндра соединяются между собой трубкой, имеющей дроссель 31, работающий в режиме «открыть - закрыть» по сигналу, поступающему по каналам 24, 25 из блока управления 16. Закрытие трубки 30 обеспечивает существенное увеличение динамической жесткости упругих элементов с жесткостями k2 и k3, что необходимо для перевода системы в особый режим работы.
Виброзащитная система реализует способ одновременного гашения колебаний объекта защиты по координатам y1 и y2 при действии кинематического возмущения z со стороны опорной поверхности.
Одновременное «зануление» координат y1 и y2 происходит при соответствующей настройке системы, что достигается выбором мест расположения дополнительных пригрузов с массами m'1 и m'2. Настроечные параметры формируются также в виде передаточных отношений между длинами A1O1, A2O2 и соответствующими положениями пригрузов m'1 и m'2 относительно центров вращения зубчатых секторов O1 и O2.
Необходимые управляющие сигналы вырабатываются в блоке 16, в котором реализуется алгоритм расчета настроечных параметров. При этом используются данные текущего динамического состояния объекта защиты.
Предлагаемая виброзащитная система может работать в специальном режиме, когда блокируются два упругих элемента k2 и k3. В этом случае виброзащитная система превращается в систему с одной степенью свободы с фиксированным отношением значений координат y1 и y2.
Математическая модель системы
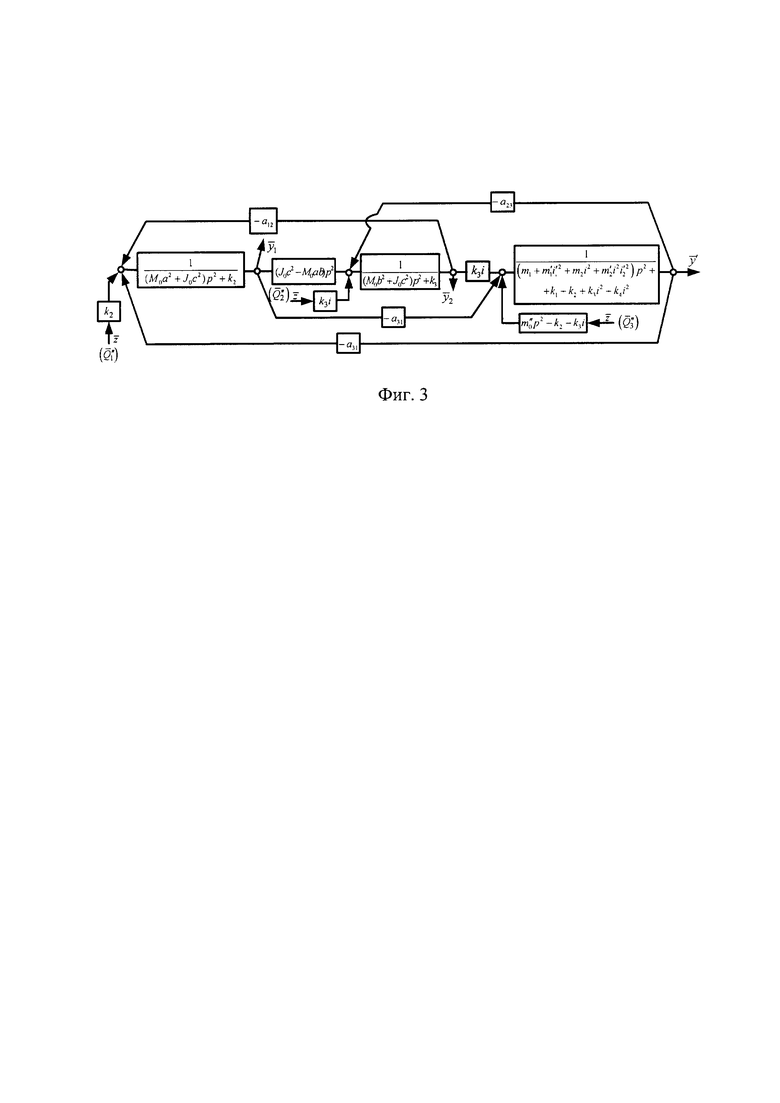
На фиг. 3 приведена детализированная структурная схема исходной системы (фиг. 1), которая является основой для построения алгоритма обработки информации в блоке управления. Структурная схема может быть использована также для предварительной оценки динамических возможностей системы методами вычислительного эксперимента.
Передаточные функции системы, приведенной на фиг. 1, определяются выражениями с использованием структурной схемы на фиг. 3



где 
Значения a11, a12, a13, a21, a22, a23, a31, a32, a33 связаны с параметрами исходной системы на фиг. 1 следующими соотношениями:

Уравнения движения системы, их преобразования и построение структурной схемы на фиг. 3 может быть проведено с помощью технологических приемов, изложенных в [3].
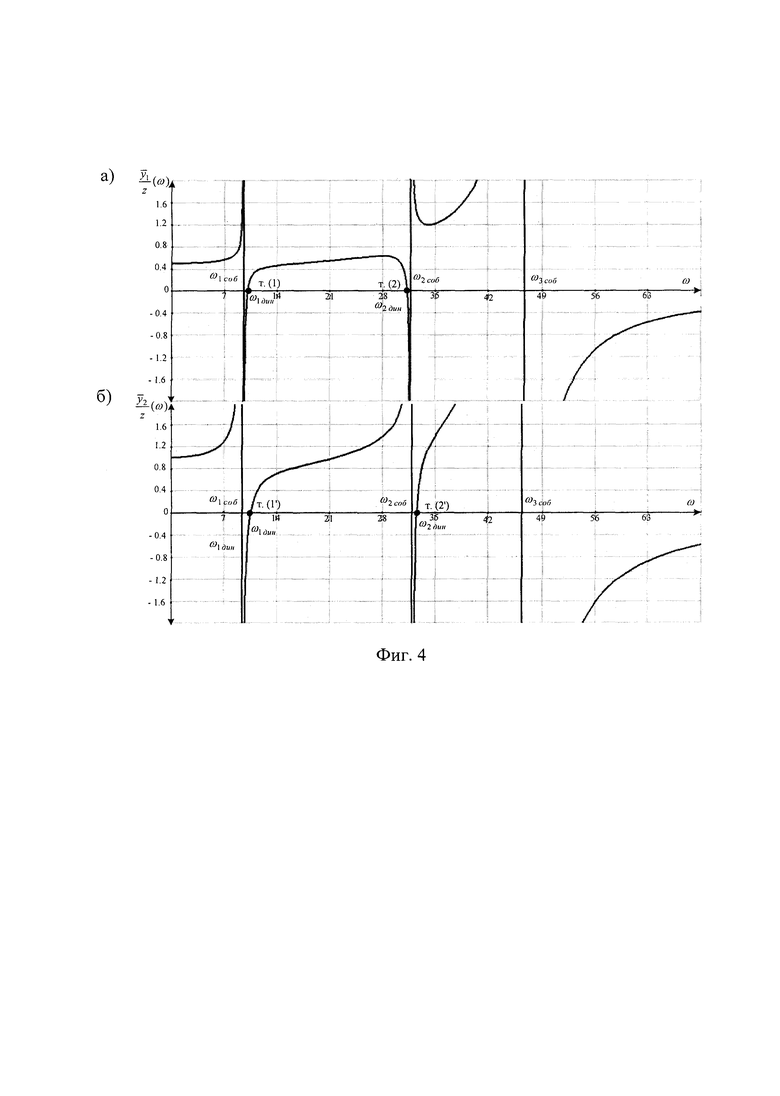
На фиг. 4 приведены амплитудно-частотные характеристики системы, полученные на основе вычислительного эксперимента (два варианта: а и б). Параметры исходной системы составляют следующие значения: вариант а - при гашении колебаний по координате y1 (i2=1.095); вариант б - при гашении колебаний по координате y2 (i2=1.4864); параметры системы для расчета: M=100 кг, J=25 кгм2, a=0.4 м, b=0.6 м, k1=60 кН/м, k2=100 кН/м, k3=100 кН/м, k4=80 кН/м, i1=1.5, i'1=0.5, i'2=0.5, m1=5 кг, m2=15 кг, m'1=10 кг, m'2=5 кг.
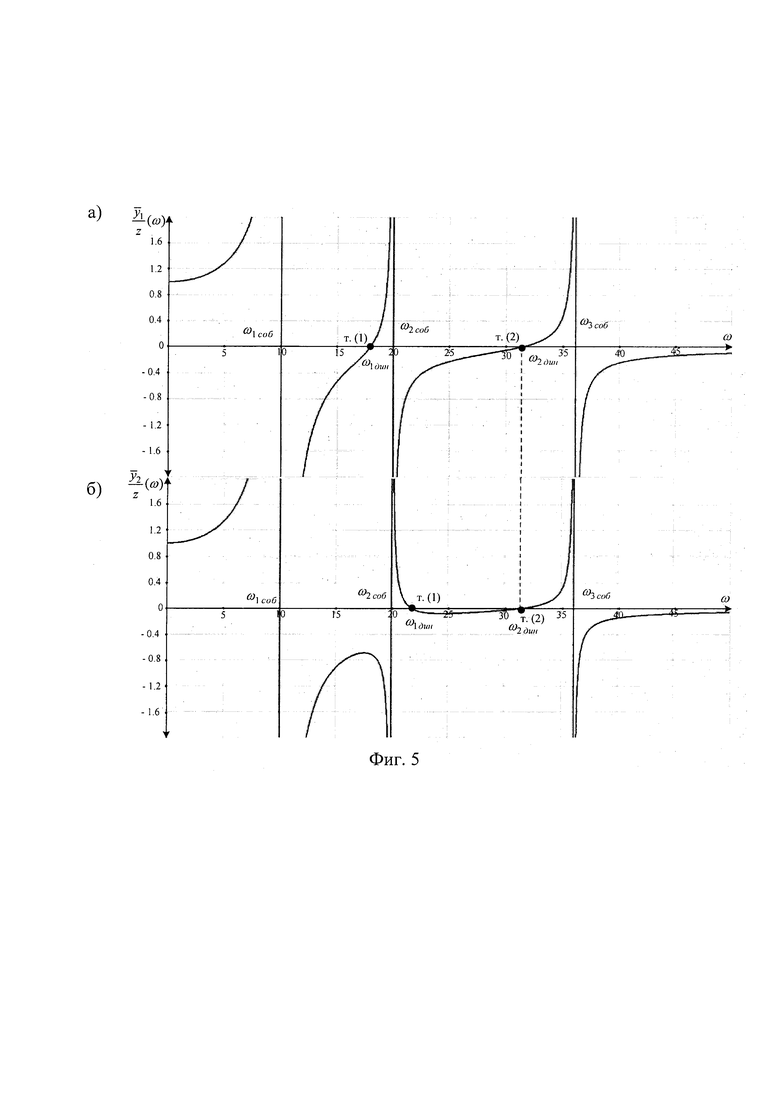
Амплитудно-частотная характеристика системы на фиг. 5, а соответствует изменению отношения амплитуд колебаний y1 и z при различных частотах. На фиг. 5, а можно отметить возможность возникновения режима динамического гашения ω1 дин., который отмечен т. (1) на оси абсцисс между частотами собственных колебаний ω1 соб. и ω2 соб.. В системе возможна реализация трех резонансных режимов ω1 соб., ω2 соб., ω3 соб.. Второй режим динамического гашения ω2 дин., находится между частотами ω2 соб. и ω3 соб., что отмечено т. (2) на оси абсцисс (фиг. 4, а). Амплитудно-частотная характеристика y2/z (ω) приведена на фиг. 4, б, где первый и второй режимы динамического гашения расположены между частотами ω2 соб. и ω3 соб. и отмечены соответственно тт. (1') и (2'). При изменении частоты внешнего возмущения от 0 до ω→∝ система в целом проходит четыре динамического гашения колебаний, которые реализуются каждый по отдельности. При соответствующей настройке, которая определяется выбором значений передаточных отношений рычажных связей и масс пригрузов возможна реализация одновременного режима динамического гашения колебаний по координатам y1 и y2, что показано на фиг. 5, а, б. При настроенном динамическом гасителе второй режим динамического гасителя колебаний происходит в частотном диапазоне между ω2 соб. и ω3 соб., а соответствующие ω2 дин. (по y1) и ω2 дин. (по y2) находятся на одной вертикали, что отмечено тт. (2), (2') на фиг. 5, а и б. Кроме режима одновременного гашения колебаний по двум координатам объекта y1 и y2, возможна реализация динамического режима колебаний по координате y1 (т. (1)) в частотном диапазоне ω1 соб.-ω2 соб.. В свою очередь, по координате y2 также возможен режим динамического гашения колебаний в частотном диапазоне ω2 соб.-ω3 соб. (т. (1') на фиг. 5, б). Система имеет следующие параметры: М=100 кг, J=25 кгм2, a=0.4 м, b=0.6 м, k1=10 кН/м, k2=20 кН/м, k3=20 кН/м, k4=10 кН/м, i1=1.5, i2=0.66667, i'1=1.386, i'2=0.5, m1=25 кг, m2=25 кг, m'1=5 кг, m'2=5 кг.
При соответствующем выборе параметров системы и ожидаемых частотах внешнего возмущения могут быть реализованы режимы одновременного гашения колебаний и в других частотных диапазонах.
При предварительно известных частотах внешних возмущений режим одновременного гашения колебаний по двум координатам может быть обсчитан и его значения заведены в блок управления системы автоматического поддержания динамического состояния.
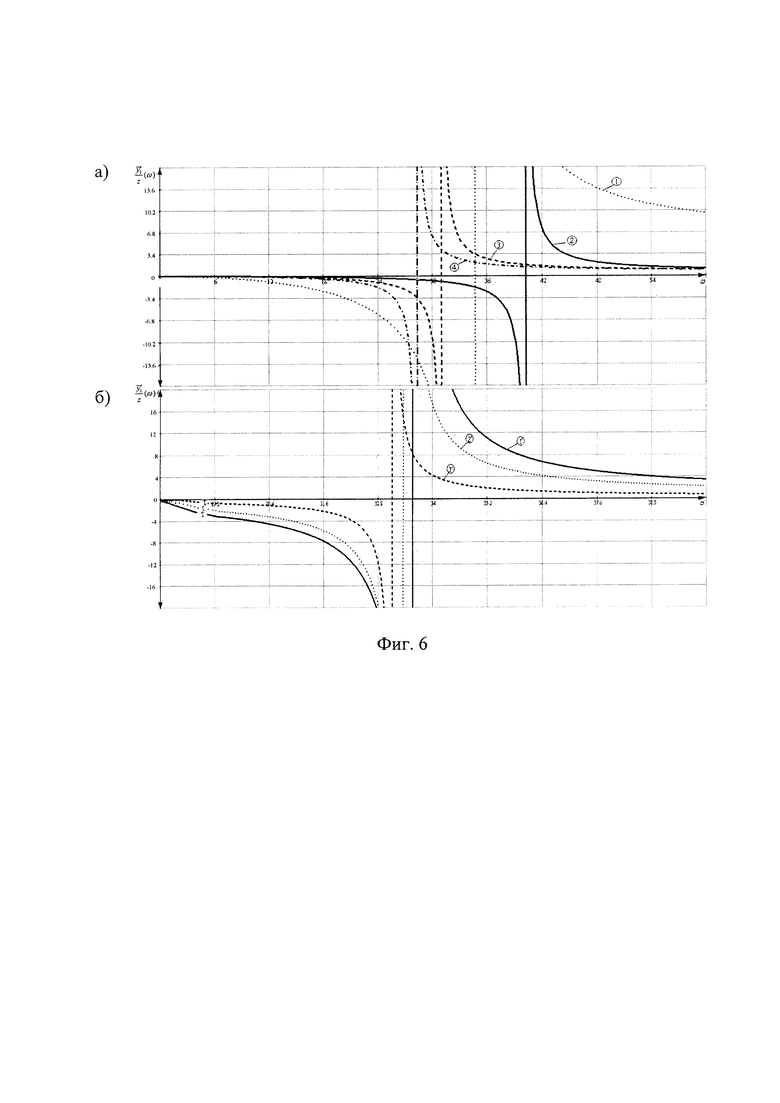
На фиг. 6 приведена амплитудно-частотная характеристика системы при «блокировании» упругих элементов с жесткостями k2, k3. Исходная система фиг. 1 в этом случае трансформируется в систему с одной степенью свободы, а объект совершает вертикальные колебания по одной координате. Такой режим может рассматриваться как переходная стадия настройки при резких изменениях параметров внешнего возмущения. Параметры исходной системы: а - при различных значениях масс объекта защиты (график 1 соответствует М=60 кг, график 2 соответствует М=90 кг, 3 - М=120 кг, 4 - М=150 кг; б - при различных значениях i1 (1' - i1=0.1, 2' - i1=1, 3' - i1=3), М=100 кг.
Литература
1. Вибрации в технике: справочник в 6-ти томах. Т. 6. Защита оборудования от вибраций / Под ред. К.В. Фролова (пред.). М.: Машиностроение. 1981. - 452 с.
2. Коренев Б.Г. Динамические гасители колебаний. Теория и технические приложения / Б.Г. Коренев, Л.М. Резников // - М.: Наука. 1963. Т. 2. - 535 с.
3. Елисеев С.В., Хоменко А.П. Динамическое гашение колебаний: концепция обратной связи и структурные методы математического моделирования. Новосибирск, 2014. 357 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОВРЕМЕННОГО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ОБЪЕКТА ЗАЩИТЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2662619C2 |
| Способ управления формированием режимов динамического гашения колебаний и устройство для его реализации | 2017 |
|
RU2654276C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2676116C2 |
| Способ динамического гашения колебаний технического объекта и устройство для его реализации | 2017 |
|
RU2668887C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ТЯГОВОГО ДВИГАТЕЛЯ ЛОКОМОТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2654877C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ЭЛЕМЕНТОВ МЕХАНИЧЕСКОЙ ЦЕПИ | 2016 |
|
RU2648661C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| Способ управления динамическим состоянием подвески транспортного средства и устройство для его реализации | 2018 |
|
RU2690135C1 |

Группа изобретений относится к области машиностроения. Используют динамические взаимодействия элементов виброзащитной системы. Твердое тело опирают на упругие опоры, связанные с рычажными механизмами. Рычажные механизмы взаимодействуют между собой через зубчатую передачу. Пазы для управляемого перемещения пригрузов обладают массами, создающими эксцентриситеты. Формируют управляемые динамические силы с помощью сервоприводов. Осуществляют корректировки взаимного расположения пригрузов на основе информации о динамическом состоянии системы. Устройство состоит из двух рычажных механизмов. Управляемый эксцентриситет формирует силы инерции, обеспечивающие эффекты динамического гашения. Устройство изменения динамической жесткости настраиваемого упругого элемента выполнено с возможностью переходить из динамического состояния с тремя степенями свободы к динамическому состоянию системы с одной степенью свободы. Достигается возможность динамического гашения колебаний одновременно по двум координатам. 3 н.п. ф-лы, 6 ил.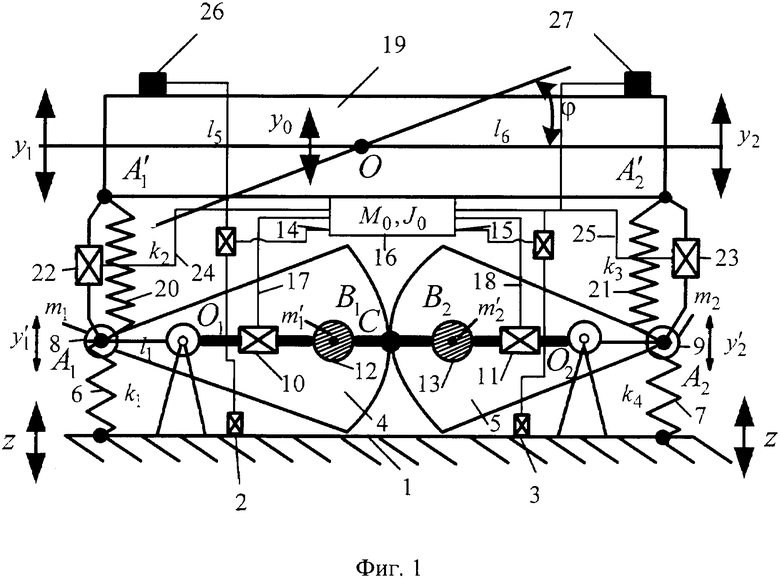
1. Способ одновременного динамического гашения колебаний объекта защиты по двум степеням свободы, основанный на использовании упругих подвесов в точках опоры, связанных с устройствами для преобразования движения в виде рычажных механизмов, имеющих точку опоры на подвижном основании, отличающийся введением зубчатой передачи, формирующей устойчивые соотношения параметров взаимодействия между двумя парциальными системами, обеспечивающей динамическое гашение одновременно по двум координатам объекта при вибрациях со стороны опорной поверхности за счет возникающих на пригрузах с дополнительными массами переносных сил инерции, динамические параметры которых корректируются за счет работы автоматической системы, имеющей датчики измерения состояния системы, устройства для обработки информации и определения управляющего сигнала, реализуемого сервоприводом, изменяющим положение пригруза относительно оси вращения зубчатого сектора.
2. Устройство обеспечения одновременного динамического гашения колебаний по двум координатам, состоящее из двух рычажных механизмов с размещенными на них пригрузами, перемещаемыми по длине рычага, отличающееся введением и использованием зубчатой передачи между рычажными механизмами за счет придания рычагам формы зубчатых секторов с пазами для перемещения пригрузов с дополнительными массами и сервоприводами, управляемыми от блока измерения, обработки и усиления сигналов, реализуемых сервоприводом в режимах динамического гашения колебаний одновременно по двум степеням свободы.
3. Устройство изменения динамической жесткости (фиг. 2) настраиваемого упругого элемента, помещенного между объектом защиты и подвижной опорой, создаваемой элементами рычажного механизма, отличающееся тем, что устройство изменения жесткости, размещаемое параллельно в тех же опорах, что и пружина, обладает свойством запирания или мгновенного увеличения динамической жесткости за счет перекрытия дросселем канала перетекания жидкости в гидравлической паре из одной полости в другую при относительных движениях, и создает возможности превращения исходной виброзащитной системы переходить из динамического состояния с тремя степенями свободы к динамическому состоянию системы с одной степенью свободы.
| Способ получения борной кислоты | 1951 |
|
SU98792A1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2015 |
|
RU2597042C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

