Изобретение относится к машиностроению и может быть использовано для виброизоляции различных транспортных средств и технологических машин, работающих в условиях интенсивного вибрационного нагружения.
Вибрации сопровождают работу многих технических объектов, работающих в условиях интенсивного динамического нагружения. В частности, это относится к установкам вентиляционного типа, насосам и компрессорному оборудованию, вибрационным конвейерам, вибропитателям и другим техническим средствам, по отношению к которым возникают проблемы уменьшения воздействия в местах закрепления с опорными поверхностями и передачи динамических взаимодействий на сопрягаемые узлы. Теоретическим и практическим аспектам решения задач вибрационной защиты оборудования и технологических машин нашли отражение в ряде известных работ [1-5].
Несмотря на то, что в практических инженерно-технических задачах используются многочисленные варианты виброзащитных средств, интерес к вопросам поиска и разработки новых способов, подходов и устройств для управления динамическим состоянием используются многочисленные варианты виброзащитных средств, интерес к вопросам поиска и разработки новых способов, подходов и устройств для управления динамическими состояниями, объектов, подверженных переменным нагрузкам, сохраняется. В последние годы большое внимание уделяется динамическим гасителям колебаний, устройствам, обладающим свойствами самонастройки или адаптации к условиям работы с учетом возможностей контроля и изменения динамического состояния защищаемого объекта. В этом плане определенными преимуществами обладают виброзащитные устройства, в которых для гашения колебаний используются динамические эффекты преобразования движения, реализуемые определенными механизмами.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известен виброизолятор транспортного средства [Нигматуллина В.Н., Червинский В.П., Вершигоров В.М., Гусаров В.И., Путилин С.В. Патент на полезную модель №29009 U1, МПК B60G 11/26, F16F 9/02; приоритет 17.09.2002], состоящий из герметичного корпуса с каналом подвода управляющей среды в его внутреннюю полость. В полости сцентрированы рабочий и дополнительный поршни. Рабочий поршень жестко связан с объектом транспортировки, образуя с корпусом дроссель переменного сечения, направляющая - отверстие. Конструкция снабжена устройством для перемещения поршней, которые выполнены в виде двухплечего рычага, шарнирно соединенного с поршнями. Ось вращения размещена на рычаге с возможностью осевого перемещения поршней и жестко соединена со штоком плунжера, который нагружен пружиной при помощи резьбового подстроечного элемента. Причем геометрические оси рабочего и дополнительного поршней, а также плунжера расположены в различных плоскостях (оси расположены в перпендикулярных плоскостях, а корпус жестко соединен с виброактивным основанием).
К недостаткам данной полезной модели можно отнести сложность настройки системы, а также износ трущейся поверхности плунжера при длительной эксплуатации, приводящий к возникновению зазоров между деталями конструкции и, соответственно, к нестабильной работе виброизолятора.
Известен патент на полезную модель [Гапоненко Е.В., Бондаренко В.Н., Рыбак Л.А., Рыбалкин Е.Ю. Патент на полезную модель №105386 U1; МПК F16F 15/02; приоритет 20.01.2011], представляющую собой виброизолятор, каждый соединительный механизм которого с объектом, содержащий основание и платформу, связанные через упругие элементы соединительными механизмами с шарнирами Гука и на концах, акселерометры и измерения ускорений, блок управления в виде микропроцессора 23 и усилителя мощности, выполнен стержневым с размещенным на нем исполнительным органом. При этом платформе обеспечивается 6 степеней свободы путем соединения ее с основанием 6-ю расположенных специальным образом независимых стержневых механизмов. Исполнительный орган, представляет собой самотормозящуюся винтовую пару, гайка которой с устройством регулирования зазора расположена внутри полого ротора электродвигателя. Статор электродвигателя соединен с нижним шарниром Гука и снабжен шпонкой, размещенной в шпоночном пазу винта-стержня, соединенного верхним концом с другим шарниром Гука. При этом акселерометры установлены у верхнего и нижнего шарниров Гука и измеряют виброускорения соответственно стоек и шарниров Гука, закрепленных соответственно на платформе (через упругие элементы) и основании, по линии, соединяющей центры шарниров Гука, расположенных на концах соединительных механизмов, а датчик относительного перемещения регистрирует их относительное перемещение. От акселерометров осуществляется управление по обратным связям, а от датчика на это основное управление накладывается дополнительный сигнал управления, который называется инвариантным. Суть его состоит в том, что он делает ускорение, измеряемое датчиком, равным нулю, т.е. платформа становится неподвижной в инерциальном пространстве, чем реализуется виброизоляция.
Недостатками рассматриваемой полезной модели являются сложность настройки работы виброизолятора, а также необходимость точной сборки и регулировки самотормозящейся передачи, ее прочности, помимо этого стоит учитывать взаимное проскальзывание рабочих поверхностей в исполнительном органе, что приводит к потерям на трение с тепловыделением.
Необходимо отметить изобретение «Виброизолирующая опора» [Короткое Е.Б., Левинзон Г.Л., Мороз А.В., Юрченко Ю.Ф. Патент на изобретение №2222729 С2, МПК F16F 6/00, 15/03; приоритет 13.12.2000]. Виброизолирующая опора содержит цилиндрический корпус, в котором соосно установлены опорный стержень и кольцевая резиновая мембрана, которая со стенками корпуса образует пневматическую демпферную камеру. На верхнем торце корпуса с помощью подшипника, выполненного из трех шариков, установлен соосно с корпусом постоянный кольцевой электромагнит, который является основным узлом электродинамического компенсатора виброизолирующей опоры. В зазоре магнитопровода постоянного кольцевого электромагнита установлена подвижная катушка. Магнитопровод и подвижная катушка центрированы относительного опорного стержня с помощью металлической мембраны. Корпус подвижной катушки связан с опорным стержнем муфтой трения. В состав виброизолирующей опоры может быть введено устройство электромагнитного торможения, состоящее из электромагнитов с якорями, жестко связанными с корпусом. Кроме того, предполагается, что в виброизолирующую опору может быть также введен горизонтальный электродинамический компенсатор, имеющий неподвижно закрепленную относительно корпуса катушку, которая введена в зазор подвижного постоянного магнита, магнитопровод которого жестко закреплен на магнитопроводе кольцевого электромагнита.
К недостаткам данного изобретения можно отнести разрушение магнитных элементов при резких колебаниях основания и отсутствие регулирования давления в демпферной камере, что не позволяет повысить общее качество работы виброзащитной системы, что провоцирует использование сложной настройки при помощи электромагнитных установок.
В качестве прототипа выбирается полезная модель [Елисеев С.В., Елисеев А.В., Каимов Е.В., Николаев А.В., Орленко А.И. Патент на полезную модель №177725 U1, МПК F16F 15/027; приоритет 06.03.2018], представляющая собой самонастраивающийся виброизолятор объекта от вибрационных воздействий, состоящий из корпуса, упругого элемента, содержащий в своем составе устройство для преобразования движения, систему управления, включающую источник энергии в виде воздушного компрессора и датчики контроля параметров состояния объекта защиты, отличающийся тем, что в системе обеспечивается режим динамического гашения колебаний за счет поднастройки параметров состояния пневматической камеры, которые определяются величиной давления в камере и возможностями изменения давления либо за счет включения компрессора или задействования электромагнитного воздушного дросселя, при этом эффект динамического гашения в системе реализуется в силу динамических особенностей взаимодействия устройства для преобразования движения, в котором частота динамического гашения колебаний и условия запирания на высоких частотах внешних воздействий определяются отношением коэффициента жесткости упругого элемента и величиной приведенной массы устройства для преобразования движения.
К основным недостаткам данной полезной модели относится сложность конструкции и то, что при совместном действии демпферной камеры и винтового механизма устройство не всегда может стабильно работать. Кроме этих факторов, конструкция значительно утяжелена из-за наличия компрессора.
Задачей данной полезной модели является обеспечение вибрационной изоляции за счет регулирования параметров жесткости пневматических упругих элементов, а также контроль за динамическим состоянием объекта защиты.
Самонастраивающийся амортизатор, состоящий из пневмобаллона, несамотормозящегося винтового механизма, системы управления, предохранительной пружины, работающей от внешнего источника энергии, датчиков контроля параметров состояния объекта защиты, отличающийся тем, что в системе дополнительно устанавливается кольцевой трубчатый пневмобаллон, возможности изменения давления в котором реализуются за счет включения внешнего компрессора или задействования дросселя в зависимости величины внешнего возмущения, в середине кольцевого пневмобаллона имеется несамотормозящийся винтовой механизм, включающий гайку-маховик со штоком, снабженным ограничителем на верхнем конце и вставленным в цилиндрический канал, вокруг штока установлена предохранительная винтовая пружина, сверху закрепленная на гайке-маховике, а снизу на основании, тем самым обеспечивается режим динамического гашения колебаний, формирующийся в силу динамических особенностей взаимодействия, в котором частота динамического гашения колебаний и условия запирания на высоких частотах внешних воздействий определяются отношением коэффициента жесткости упругого элемента и величиной приведенной массы несамотормозящегося винтового механизма.
Суть изобретения поясняется чертежами.
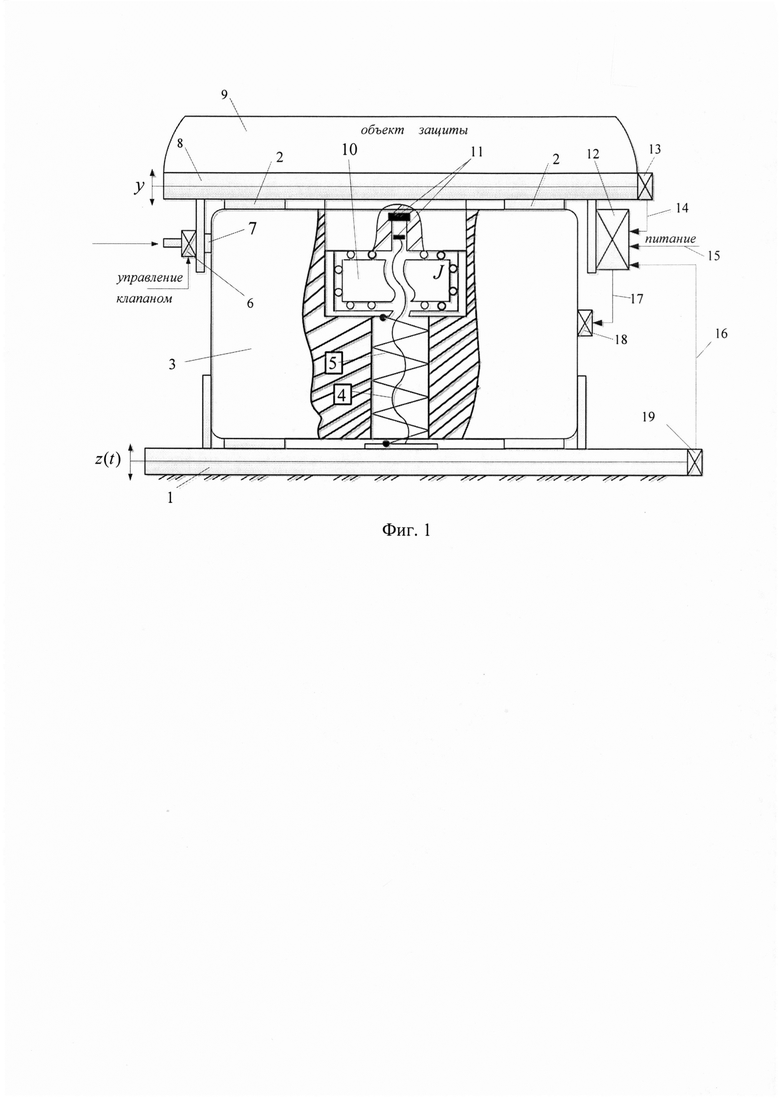
На фиг. 1 представлена принципиальная схема устройства. Приняты обозначения: 1 - опорная поверхность; 2 - крепежные шайбы, 3 - пневматический баллон; устройство для преобразования движения, состоящее из винтового штока 4 и гайки-маховика 10, 5 - предохранительная винтовая пружина; 6 - управляемый дроссель, 7 - штуцер; 8 - опорная площадка объекта защиты 9, 11 - ограничители, 12 - блок обработки информации, 13, 19 - датчики динамического состояния, 14, 16, 17 - каналы связи, 18 - клапан.
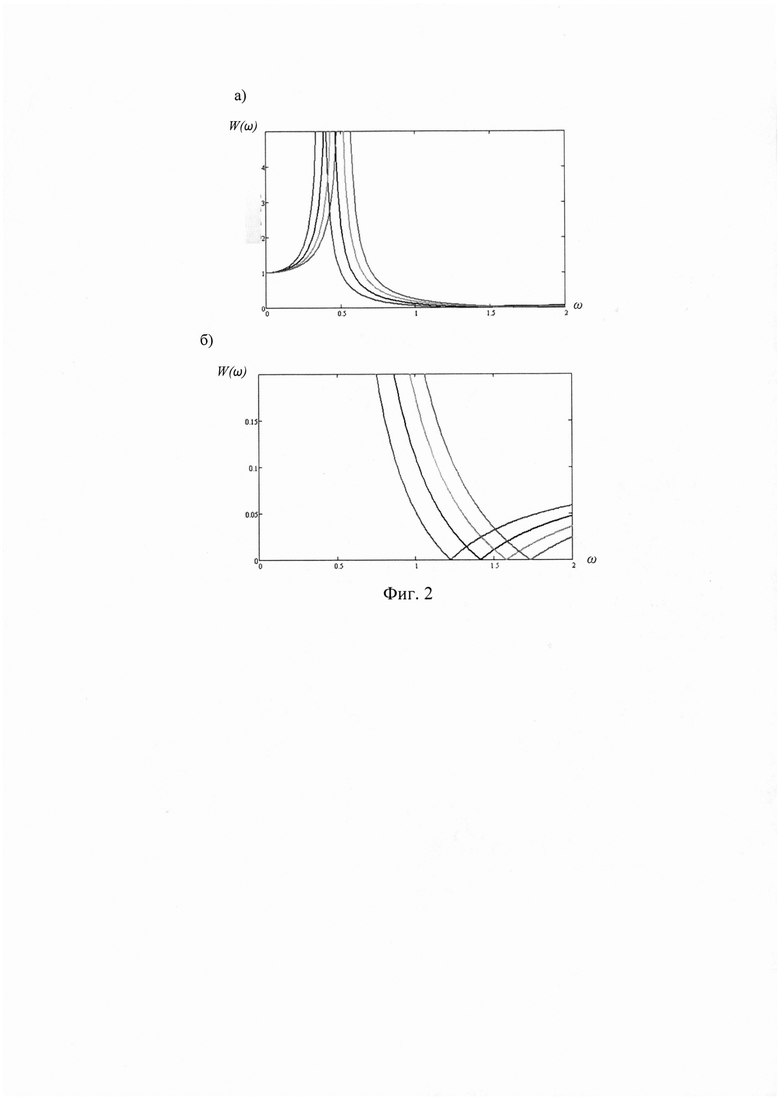
На фиг. 2 приведены графики амплитудно-частотных характеристик в общем виде (а) и с детализацией смещения частот собственных колебаний в зависимости от β.
Предлагаемый амортизатор предназначен для снижения динамических воздействий, которые передаются от опорной поверхности 1 (или опорного основания 1 с законом движения z(t)), определяемом датчиком динамического состояния 19, передающим необходимые данные в блок обработки информации 12 и управления амортизатор.
Снижение уровня внешних вибрационных воздействий на объект защиты 9, состояние которого определяется координатой у, измеряемой датчиком 13 (связь с блоком управления 14), обеспечивается механической колебательной системой, состоящей из устройства для преобразования движения (УПД) и двух упругих элементов: кольцевой трубчатой пневматической пружины (пневматический баллон 3) и предохранительной винтовой пружины 5. Устройство для преобразования движения и предохранительная пружина находятся внутри трубчатого пневмобаллона, что показано на фиг. 1. Устройство для преобразования движения (УПД) состоит из винтового штока 4 и гайки-маховика 10, образующих несамотормозящийся винтовой механизм, выполненный в конструктивно-технической форме, предполагающей минимальное трение и отсутствие соударений в винтовой паре. Винтовой шток 4 имеет крепежное закрепление с опорной поверхностью 1. Гайка-маховик 10 закрепляется в специальном стакане и соприкасается с его поверхностями через шариковые подшипники. Винтовая пара имеет ограничители 11, защищающие конструкцию амортизатор от сильных ударных воздействий. Пневматическая пружина 3 (пневмобаллон) выполнен таким образом, что его положение фиксируется крепежными шайбами 2 на опорных площадках 1 и 8, что обеспечивает удерживающий характер связей элементов системы. Устойчивость пневматической пружины от возможных горизонтальных смещений обеспечивается размещением пневмобаллона (трубчатого типа) в специальном стакане, верхняя и нижняя часть которого жестко закреплены с нижней 1 и верхней опорными плитами. Пневматическая пружина 3 имеет управляемый дроссель 6, обеспечивающий через штуцер 7 подачу воздуха в пневмобаллон 3 от внешнего компрессора. Управление подключение компрессора осуществляется блоком управления 12. Предохранительная пружина 5 выполняет функции защиты устройства от поломки в случае отказа компрессора.
Управление динамическим состоянием объекта производится системой управления, имеющей микропроцессор и выдающей сигналы на подкачку пневмобаллона 3 или стравливание избыточного воздуха через клапан 18. Блок управления 12 имеет датчики сбора информации о динамическом состоянии объекта - 13, 19 и соответствующие каналы связи (коммуникации) 14, 16, 17.
Наличие в структуре виброзащитной системы УПД и упругих элементов предопределяет возможности обеспечения работы системы в режимах близких к динамическому гашению колебаний. Настройка на такой динамический режим достигается путем соответствующей регулировки жесткости пневматического баллона, то есть - чередованием процессов подкачки и «стравлинвания» избыточного давления. Особенностью устройства является то обстоятельство, что механизм УПД находится во внутреннем изолированном пространстве, создаваемом трубчатым пневмобаллоном 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
| Способ управления формированием режимов динамического гашения колебаний и устройство для его реализации | 2017 |
|
RU2654276C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ТЯГОВОГО ДВИГАТЕЛЯ ЛОКОМОТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2654877C1 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| Способ управления динамическим состоянием подвески транспортного средства и устройство для его реализации | 2018 |
|
RU2690135C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ ЭЛЕМЕНТОВ МЕХАНИЧЕСКОЙ ЦЕПИ | 2016 |
|
RU2648661C1 |
Изобретение относится к области машиностроения. Самонастраивающийся амортизатор содержит пневмобаллон, несамотормозящийся винтовой механизм, систему управления, предохранительную пружину, датчики контроля параметров состояния объекта защиты. Кольцевой трубчатый пневмобаллон дополнительно установлен в системе. Возможность изменения давления в пневмобаллоне реализована посредством внешнего компрессора или дросселя. Несамотормозящийся винтовой механизм установлен в середине кольцевого пневмобаллона. Шток снабжен ограничителем на верхнем конце и вставлен в цилиндрический канал. Вокруг штока установлена предохранительная винтовая пружина, сверху закрепленная на гайке-маховике. Частота динамического гашения колебаний и условия запирания на высоких частотах внешних воздействий определяются отношением коэффициента жесткости упругого элемента и величиной приведенной массы несамотормозящегося винтового механизма. Достигается повышение качества и стабильности работы амортизатора. 2 ил.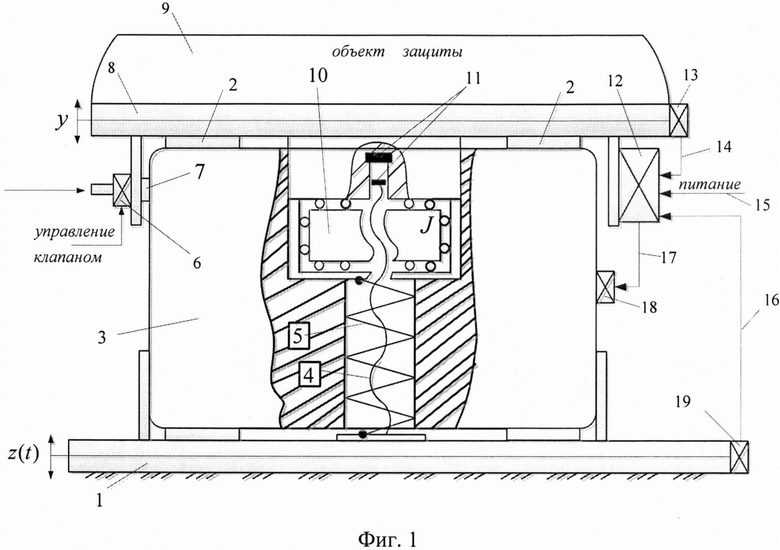
Самонастраивающийся амортизатор, состоящий из пневмобаллона, несамотормозящегося винтового механизма, системы управления, предохранительной пружины, работающей от внешнего источника энергии, датчиков контроля параметров состояния объекта защиты, отличающийся тем, что в системе дополнительно устанавливается кольцевой трубчатый пневмобаллон, возможности изменения давления в котором реализуются за счет включения внешнего компрессора или задействования дросселя в зависимости от величины внешнего возмущения, в середине кольцевого пневмобаллона имеется несамотормозящийся винтовой механизм, включающий гайку-маховик со штоком, снабженным ограничителем на верхнем конце и вставленным в цилиндрический канал, вокруг штока установлена предохранительная винтовая пружина, сверху закрепленная на гайке-маховике, а снизу на основании тем самым обеспечивается режим динамического гашения колебаний, формирующийся в силу динамических особенностей взаимодействия, в котором частота динамического гашения колебаний и условия запирания на высоких частотах внешних воздействий определяются отношением коэффициента жесткости упругого элемента и величиной приведенной массы несамотормозящегося винтового механизма.
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2015 |
|
RU2597042C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Дисковый питатель погрузчика | 1960 |
|
SU136112A1 |

