Изобретение относится к приборостроению, в частности к приборам для измерения ускорения, и может быть использовано в системах навигации и ориентации.
Известны маятниковые компенсационные акселерометры с упругим подвесом, предназначенные для определения ускорения объекта (патент Франции N 2562254, кл. G 01 P 15/08, 1986). Такие акселерометры имеют чувствительный элемент (ЧЭ) в виде маятника на упругом подвесе, устройство для измерения перемещения ЧЭ, выход которого через усилитель соединен с входом датчика уравновешивания.
Недостатком таких акселерометров является возможность линейного перемещения ЧЭ из-за податливости упругого подвеса при действии пиковых ускорений, например ударных, приводящая к пластическим деформациям упругого подвеса, либо к его разрушению.
Из известных акселерометров наиболее близким по технической сущности является маятниковый компенсационный акселерометр с упругим подвесом (см. патент Франции N 2562254, кл. G 01 P 15/08, 1986), принятый за прототип и содержащий корпус, ЧЭ, соединенный с корпусом при помощи упругого подвеса, устройство для измерения перемещения ЧЭ, датчик уравновешивания и по одному упору с каждой стороны ЧЭ, ограничивающему перемещение ЧЭ и расположенному в центре удара ЧЭ, благодаря чему нагрузка в упругом подвесе равна нулю (см. Николаи Е.А. Теоретическая механика. Ч. II. М., 1958, с.317).
Недостатком акселерометра является необходимость размещения упоров с большой точностью в строго определенном месте, что не всегда достижимо, исходя из заданных конструктивных требований и особенностей конструкции узлов и сборок, а также за счет неизбежных технологических допусков. В реальной конструкции точка соприкосновения ЧЭ с упором может не совпадать с центром удара, что приведет к возникновению недопустимых напряжений в упругом элементе при действии внешних сил, к появлению пластической деформации упругого подвеса, либо к его разрушению, что практически является отказом акселерометра и навигационной системы.
Целью изобретения является повышение надежности маятникового компенсационного акселерометра с упругим подвесом.
Цель достигается тем, что в маятниковом компенсационном акселерометре с упругим подвесом, содержащем корпус, ЧЭ, соединенный с корпусом при помощи упру- гого подвеса, устройство для измерения перемещения ЧЭ, датчик уравновешивания и по одному упору с каждой стороны, ограничивающему угловое перемещение ЧЭ, устанавливают дополнительно вторые упоры, по одному с каждой стороны таким образом, чтобы центр масс ЧЭ находился между первым и вторым упорами, расположенными по одну сторону маятника, а расстояния h и h1 от конца упругого элемента подвеса (УП) до первого и второго упоров и расстояния Н и Н1 от плоскости ЧЭ до первого и второго упоров удовлетворяли условию +
+  - σ
- σ
(1) где Су - угловая жесткость упругого элемента подвеса;
Сл - линейная жесткость упругого элемента подвеса;
W - момент сопротивления сечения упругого элемента;
S - площадь сечения упругого элемента подвеса;
h - расстояние от конца упругого элемента до первых упоров;
h1 - расстояние от конца упругого элемента до вторых упоров;
Н - расстояние от плоскости ЧЭ до первых упоров;
Н1 - расстояние от плоскости ЧЭ до вторых упоров;
σдоп - допустимое напряжение в упругом элементе подвеса;
l - длина упругого элемента подвеса.
Из вышесказанного можно сделать вывод, что предложенное техническое решение отвечает критерию "новизна".
На фиг.1-4 показан предлагаемый акселерометр.
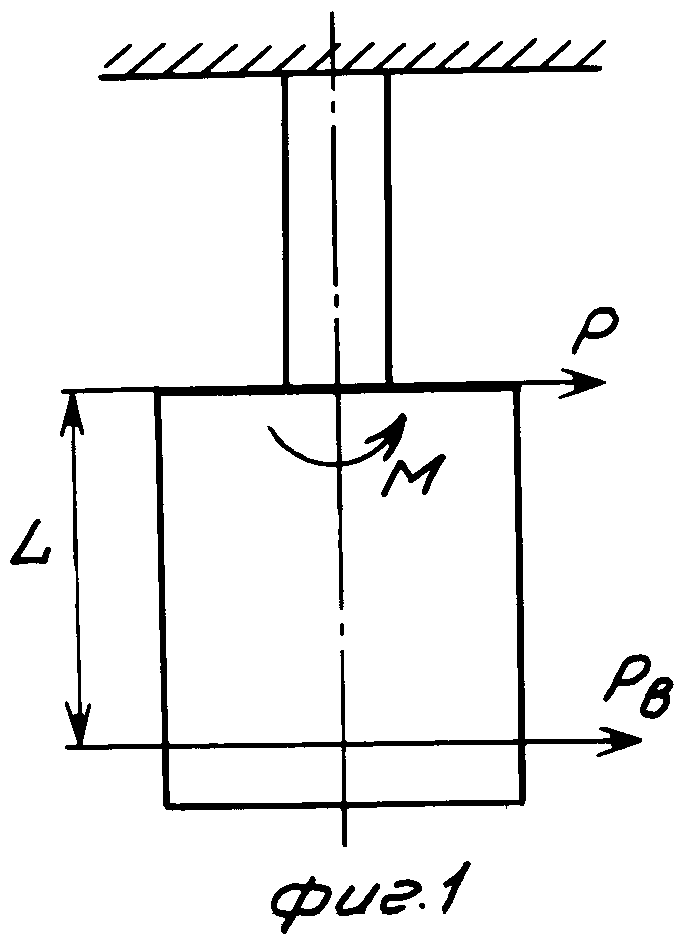
На ЧЭ действует возмущающая сила
Рв=m ˙ax, где ax - ускорение, приложенное к центру масс ЧЭ;
m - масса ЧЭ.
Пользуясь леммой о параллельном переносе линии действия силы, можно заменить эту силу силой, приложенной к концу УП и некоторой присоединенной парой сил с моментом, равным моменту данной силы относительно новой точки ее приложения (фиг. 1). Таким образом, УП нагружен поперечной силой, приложенной к его концу
Р=Pв и изгибающим моментом
М=Рв ˙ L, где L - расстояние от центра масс ЧЭ до его УП.
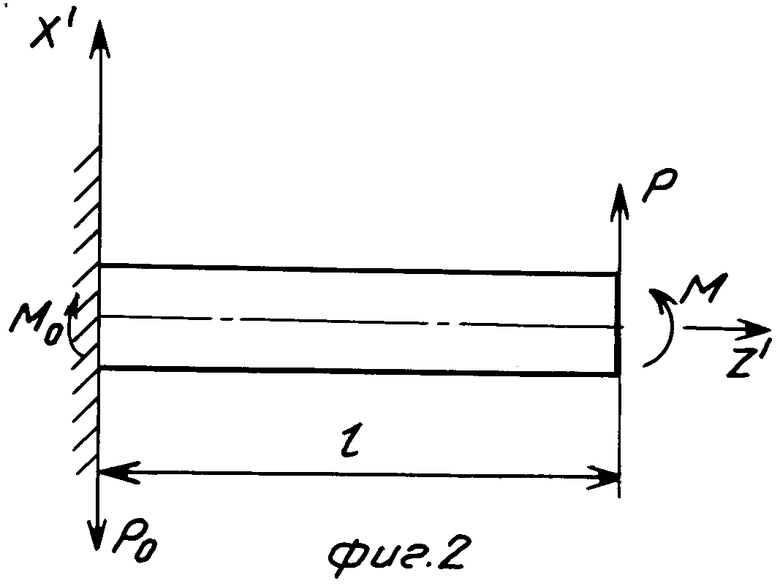
Изобразим УП отдельно фиг.2. Для описания перемещения УП воспользуемся универсальным уравнением упругой линии (см. Писаренко Г.С. и др. Сопротивление материалов/ Киев.: Вища школа, 1979, с.285)
X′(Z′) = Xo+θoZ′+(EJ-1·  -
-  ,
,
(2) где хо и θo - соответственно прогиб и угол поворота в начале координат;
Мо и Ро - изгибающий момент и поперечная сила, действующие в сечении, совпадающем с началом координат;
Е - модуль Юнга материала;
J - центральный момент инерции поперечного сечения УП.
Дифференцируя (2), получим уравнение углов поворота сечений УП
θ′(Z′) = θo+(EJ) MoZ′-
MoZ′- 
(3)
Из условий статического равновесия -
-

(4)
Поскольку для УП, имеющего заделку, прогиб и угол поворота сечения равны нулю, то
хо= θo = 0 (5) (см. Писаренко Г.С. и др. Сопротивление материалов. Киев: Вища школа, 1979, с.273). Следовательно, (2) и (3) с учетом (4) и (5) для z=l можно записать в виде:





(6) где l - длина УП.
По определению, жесткость УП есть отношение нагрузки, действующей на УП, к перемещению, вызванному этой нагрузкой. Следовательно, коэффициенты cij, i, j=1,2) в выражениях для Р и М, полученных из (6), представляют собой жесткости рассматриваемого упругого элемента




(7)
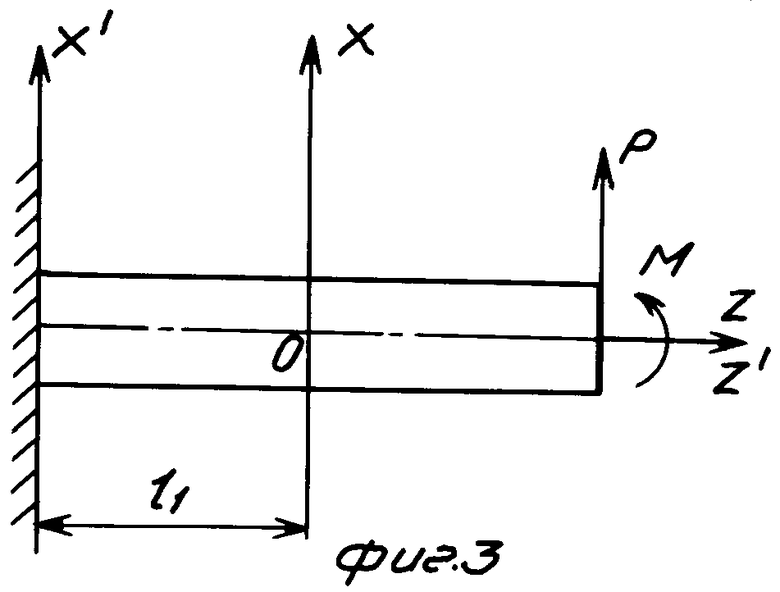
Для упругого элемента известно понятие центра жесткости. Особенность этой точки заключается в том, что для системы координат, начало которой совпадает с центром жесткости упругого элемента, диагональные элементы cij (i≠j) матрицы жесткостей с=ll cij ll обращаются в нуль (см. Вибрация в технике. Под ред. Болотина В.В. Т.1, М.: Машиностроение, 1978 с.74). Переходя в (7) к новой системе координат ОХZ с началом в центре жесткости (фиг.3), имеем

 -l
-l

(8) где l - расстояние между центром жесткости и заделкой УП.
Из уравнений (7) и (8) имеем


(9) где Р и М - поперечная сила и изгибающий момент, действующие на УП в системе координат ОХZ.
Так как точка О - центр жесткости УП, то из условия равенства нулю диагональных членов матрицы жесткостей найдем ее положение
l1= -  =
=  , а уравнения (9) примут вид
, а уравнения (9) примут вид



 (10) где Сл=С11 - линейная жесткость УП;
(10) где Сл=С11 - линейная жесткость УП;
Су=С22+С21l1 - угловая жесткость УП.
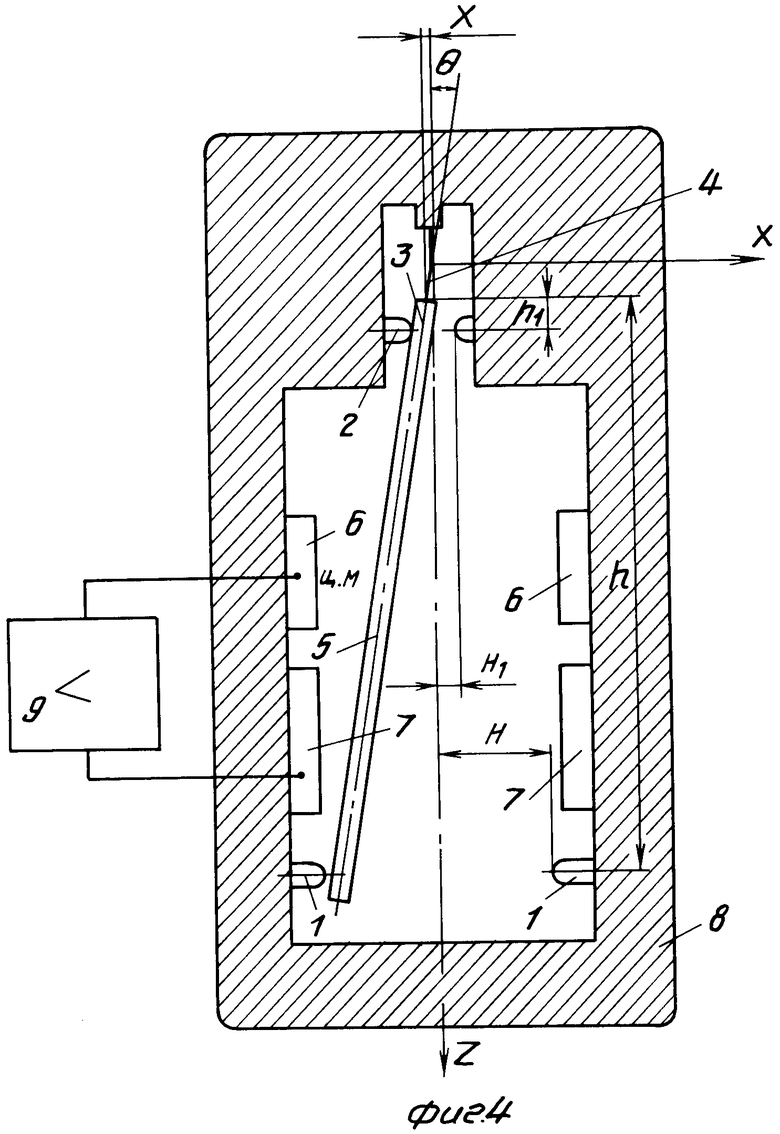
При положении 3 ЧЭ на первом 1 и втором 2 упорах, размещенных таким образом, что центр 5 масс ЧЭ находится между ними, конец 4 УП повернут на угол θ и смещен на х (фиг.4). При этом


(11)
где h1, h - расстояние от конца УП до вторых и первых упоров соответственно;
Н1, Н - расстояния от плоскости, определяемой осями подвеса Y и Z ЧЭ, до вторых и первых упоров соответственно.
Так как ввиду малости угла θ tg θ≈θ , то уравнения (10) примут вид


(12)
Очевидно, что независимо от величины нагрузки, приложенной к ЧЭ 3 (фиг. 4), момент и поперечная сила, приложенные к концу УП, будут определяться уравнениями (12), т.е. будут определяться только конструкцией прибора.
Поскольку УП представляет собой балку, один конец которой заделан, а второй нагружен поперечной силой Р и моментом М, то нормальные, касательные и эквивалентные напряжения определяются по формулам (см. В.И.Феодосьев. Сопротивление материалов. М.: Наука, 1967, с.135-139, 267)

(13) где σ,τ,σэкв - нормальные, касательные и эквивалентные напряжения соответственно.
Условие отсутствия деформации УП
σэкв ≅ σдоп, (14) где σдоп - допустимые напряжения в УП.
Подставив в (14) выражения (12) и (13), получаем +
+  - σ
- σ
(15)
Таким образом, расположение в акселерометре двух пар упоров, ограничивающих перемещение ЧЭ, на расстояниях h и h1 от конца УП и Н и Н1 от плоскости ЧЭ прибора, связанных между собой соотношением (15), ограничивает напряжения в УП заранее заданной величиной σдоп, обеспечивающей отсутствие остаточных деформаций УП, что повышает надежность.
Из изложенного можно сделать вывод, что предлагаемое техническое решение отвечает критерию "Существенное отличие".
На фиг.1 представлена схема нагружения ЧЭ; на фиг.2 - схема нагружения УП; на фиг.3 - схема нагружения УП в системе координат с началом в центре жесткости УЭ; на фиг.4 - маятниковый компенсационный акселерометр, состоящий из корпуса 8, с которым при помощи упругого подвеса 4 соединен чувствительный элемент 3, центр 5 масс которого расположен между упорами 1 и 2, устройства 7 измерения перемещения, датчика 6 уравновешивания и усилителя 9.
Рассмотрим акселерометр, УП которого имеет следующие характеристики:
Сл=2,94 ˙104 н/м;
Су=4˙10-4 н ˙м/рад;
l=1,5˙10-4 м;
W=5,4˙10-14 м3;
S=1,8˙18-8 м2; σдоп=1˙108 н/м2
Пусть первые упоры расположены таким образом, что h=8,8˙10-5 м, а Н= 5,1˙10-5 м, а для вторых - h1=1,1˙10-3 м, тогда из уравнения (15) имеем Н11= 7,0˙10-6 м и Н12=4,8˙10-6 м, т.е. при 4,8˙10-6 ≅ Н1 ≅7,0˙10-6 м напряжения в УП будут ≅σдоп. Случай Н1=7,0˙10-6 м показан на фиг.4, а при Н1= 4,8˙10-6 м конец УП будет находиться правее оси Z (фиг.4).
Использование двух пар упоров, расположенных в соответствии с уравнением (15), выгодно отличает предлагаемый акселерометр от прототипа, так как обеспечивает надежность работы УП и при этом не требует расположения упоров в строго определенном месте, определяемом конструкцией.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| АКСЕЛЕРОМЕТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 1992 |
|
RU2018131C1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825144A1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2039994C1 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1990 |
|
SU1785345A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1998 |
|
RU2137141C1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825145A1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825143A1 |
| АКСЕЛЕРОМЕТР | 1992 |
|
RU2018132C1 |
Использование: изобретение относится к приборостроению, в частности к приборам для измерения ускорения. Сущность изобретения: устройство включает соединенный с корпусом при помощи упругого подвеса, маятник, центр масс которого расположен между двумя парами упоров, устройство для измерения перемещения и датчик уравновешивания. Упоры расположены относительно маятника и конца упругого элемента на расстояниях, определяемых из условия, приведенного в описании. Количество пар вторых упоров может равняться количеству упругих элементов, в этом случае они образуют с первыми упорами плоскость опоры для маятника. 1 з.п. ф-лы, 4 ил.
 +
+  - σд
- σд
где Cу, Cл - угловая и линейная жесткости упругого элемента;
W - момент сопротивления сечения упругого элемента;
S - площадь сечения упругого элемента;
l - длина упругого элемента;
σдоп - допустимое напряжение в упругом элементе;
h, h1 - расстояние от конца упругого элемента до первых и вторых упоров соответственно;
H, H1 - расстояние от плоскости чувствительного элемента до первых и вторых упоров соответственно.
| ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2014 |
|
RU2562254C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
