Изобретение относится к приборостроению и может быть использовано в компенсационных акселерометрах, имеющих чувствительный элемент с упругим подвесом, дифференциальный датчик положения, датчик момента и встроенный усилитель.
Известен способ компенсации температурной погрешности акселерометра, заключающийся в том, что в собранном акселерометре определяют температурные погрешности отдельных блоков акселерометра, затем с помощью вспомогательных элементов изменяют температурные характеристики акселерометра в сторону уменьшения температурных погрешностей.
Этот способ принят за прототип и описан в литературе. Недостатком его является то, что он не устраняет температурных изменений аддитивной погрешности акселерометра.
Целью изобретения является уменьшение аддитивной погрешности акселерометра.
Цель достигается способом компенсации температурной погрешности компенсационного акселерометра, заключающимся в том, что в собранном акселерометре определяют температурные погрешности отдельных блоков акселерометра, затем с помощью вспомогательных элементов изменяют температурные характеристики акселерометра в сторону уменьшения температурных погрешностей, при котором предварительно соединяют блоки акселерометра между собой установленной полярностью входных и выходных клемм блоков, измеряют значение аддитивного выходного сигнала акелерометра при этом первом варианте соединения и двух значениях температуры окружающей среды, меняют при втором варианте полярности соединения блоков между собой и повторяют измерения при тех же двух значениях температур окружающей среды, по результатам всех измерений определяют значения и знаки температурных коэффициентов аддитивной погрешности, обусловленной изменением характеристики следящей системы kси упругого подвеса ky, после чего окончательно соединяют блоки акселерометра между собой по первому варианту включения, если знаки коэффициентов kс и ky одинаковы, и по второму варианту включения, если знаки этих коэффициентов противоположны.
В соответствии с предлагаемым способом блоки акселерометра соединяются между собой в таком варианте полярностей входных и выходных клемм блоков, при котором составляющие температурной аддитивной погрешности, обусловленные изменением характеристик следящей системы и упругого подвеса, имеют разные знаки и компенсируют друг друга. При этом происходит уменьшение температурного изменения аддитивной погрешности акселерометра до 5-10 раз.
Отличительные признаки заявленного акселерометра заключаются в том, то предварительно соединяют блоки акселерометра между собой установленной полярностью входных и выходных клемм блоков, измеряют значение аддитивного выходного сигнала акселерометра при этом первом варианте соединения и двух значениях температуры окружающей среды, меняют при втором варианте полярности соединения блоков между собой и повторяют измерения при тех же двух значениях температуры окружающей среды, по результатам всех измерений определяют значения и знаки температурных коэффициентов аддитивной погрешности, обусловленной изменением характеристик следящей системы kс и упругого подвеса ky, после чего окончательно соединяют блоки акселерометра между собой по первому варианту включения, если знаки коэффициентов kc и ky одинаковы, и по второму варианту включения, если знаки этих коэффициентов противоположны.
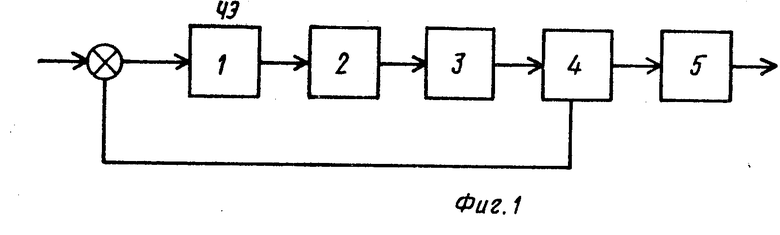
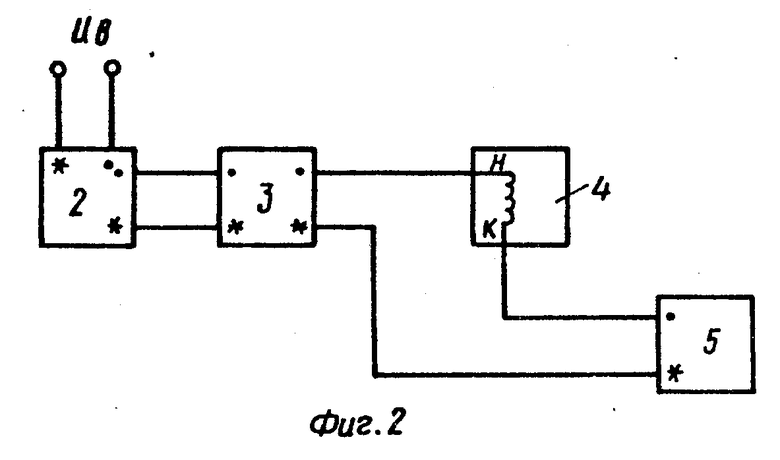
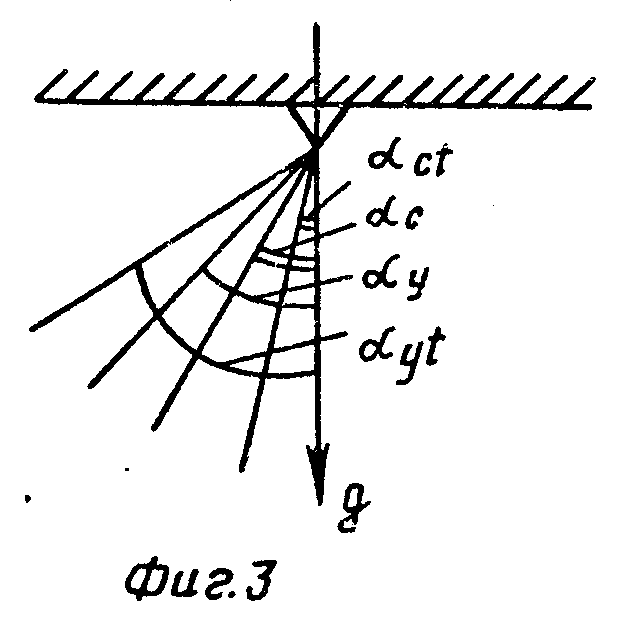
На фиг. 1 приведена блок-схема акселерометра, поясняющая осуществление заявленного способа; на фиг.2 схема соединения; на фиг.3 показаны угловые положения чувствительного элемента относительно вектора ускорения свободного падения g, при которых выходной сигнал акселерометра определяется воздействием соответствующих элементов акселерометра.
Акселерометр имеет чувствительный элемент 1 с упругим подвесом, дифференциальный датчик положения 2, усилитель 3 следящей системы, датчик момента 4, измерительное устройство 5 (см. фиг.1). Чувствительный элемент 1 с упругим подвесом, датчик положения 2, усилитель следящей системы 3, датчик момента 4 конструктивно выполнены в одном устройстве датчике акселерометра.
В датчике акселерометра чувствительный элемент 1 под действием инерционной силы, вызванной ускорением, отклоняется от положения равновесия. Это отклонение датчиком положения 2 преобразуется в электрический сигнал, который усиливается усилителем 3 и поступает в датчик момента 4, где электрический сигнал преобразуется в компенсационную силу, уравновешивающую инерционную силу. Измерительное устройство 5 измеряет сигнал акселерометра, определяя величину и направление ускорения.
На фиг. 2 показана схема электрических соединений блоков акселерометра, где точками и звездочками показана полярность их включения. Напряжение возбуждения Uв датчика положения 2, выход датчика положения 2, начало и конец компенсационной катушки датчика момента 4 включены относительно входной и выходной цепей усилителя 3 в такой полярности, чтобы обеспечить получение отрицательной обратной связи в следующей системе акселерометра.
Способ осуществляют следующим образом. Предварительно соединяют датчик положения 2, датчик момента 4 с усилителем 3, измерительное устройство 5 с датчиком момента 4 и усилителем 3 с начально установленной полярностью их сигналов в соответствии с фиг.2. При этом при одном значении температуры окружающей среды измеряют аддитивный выходной сигнал Uо, значение которого определяется выражением
Uo Kg [ αc-Co(αy-αc)] (1) где Kg крутизна выходной характеристики акселерометра;
αc ошибка углового согласования следящей системы;
αy угловое положение чувствительного элемента, при котором сила, вызванная проекцией ускорения свободного падения на реальную измерительную ось, уравновешивает силу, создаваемую упругим подвесом чувствительного элемента;
Со относительная жесткость упругого подвеса.
Затем при другом значении температуры окружающей среды измеряют новое значение Uоt аддитивного нулевого сигнала акселерометра, имеющего вид
Uot Kg [ αc+Δαct-Co(αy+
+Δαyt-αc-Δαct)] (2) где Δαct изменение углового положения чувствительного элемента, вызванное изменениями характеристик элементов следящей системы с температурой;
Δαyt изменение углового положения чувствительного элемента, вызванное температурным изменением силы, создаваемой упругим подвесом.
Вычитая из выражения (2) выражение (1), получают выражение для температурного изменения ΔUot аддитивной погрешности акселерометра
ΔUot Kg [ Δαct-Co(Δαyt-Δαct) (3)
Затем изменяют на противоположную полярность включения блоков акселерометра. Измеряют аддитивный выходной сигнал акселерометра при двух указанных температурах окружающей среды, определяют температурное изменение аддитивного сигнала Δ Uоt' акселерометра при втором варианте включения блоков акселерометра, имеющее выражение Δ Uot' Kg [-Δαot-Co(Δαyt+Δαct)] (4)
Температурные составляющие аддитивной погрешности Δαct и Δαytмогут быть выражены следующим образом:
Δαct= kc Δt (5)
Δαyt ky Δt, (6) где Δ t разность между двумя значениями температуры, при которых производились измерения;
kc температурный коэффициент аддитивной погрешности, вызванной изменением характеристик следящей системы;
ky температурный коэффициент аддитивной погрешности, вызванной изменением характеристик упругого подвеса. Подставив в выражения (3) и (4) выражения (5) и (6), получим
Δ Uot Kg Δ t [kc (1 + Co) ky Co] (7)
Δ Uot' Kg Δ t [-kc (1 + Co) ky Co] (8)
По результатам всех измерений значений аддитивной погрешности акселерометра при двух значениях температуры окружающей среды определяют на основании выражений (7) и (8) значения и знаки температурных коэффициентов аддитивной погрешности, обусловленной изменением характеристик следящей системы kc и упругого подвеса ky
kc= 
(9)
ky= 
(10)
После этого окончательно подсоединяют датчик положения, датчик момента к усилителю, измерительное устройство к датчику момента и усилителю по первому варианту включения блоков акселерометра, если знаки коэффициентов kc и ky одинаковы, и по второму варианту включения, если знаки этих коэффициентов противоположны.
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр компенсационного типа | 2020 |
|
RU2741277C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| КОСВЕННЫЙ СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО АДДИТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ | 2006 |
|
RU2307998C1 |
| СПОСОБ КОМПЕНСАЦИИ МУЛЬТИПЛИКАТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ДАТЧИКА С ВИБРИРУЮЩИМ ЭЛЕМЕНТОМ | 2005 |
|
RU2302619C2 |
| СПОСОБ КОМПЕНСАЦИИ АДДИТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ДАТЧИКА С ВИБРИРУЮЩИМ ЭЛЕМЕНТОМ | 2005 |
|
RU2306530C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| СПОСОБ КОМПЕНСАЦИИ АДДИТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ ДАТЧИКА С ВИБРИРУЮЩИМ ЭЛЕМЕНТОМ | 2005 |
|
RU2300739C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2039994C1 |
| СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО АДДИТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ | 2006 |
|
RU2298147C1 |
| СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО АДДИТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ | 2005 |
|
RU2276325C1 |
Использование: приборостроение, регулировка и проверка компенсационных акселерометров. Сущность изобретения: блоки акселерометра соединяют между собой установленной полярностью входных и выходных клемм блоков. Измеряют значение аддитивного выходного сигнала акселерометра при первом варианте соединения и двух значениях температуры окружающей среды. Меняют при втором варианте полярности соединения этих блоков между собой и повторяют измерения при тех же двух значениях температур окружающей среды. По результатам всех измерений определяют значения и знаки температурных коэффициентов аддитивной погрешности, обусловленной изменением характеристик следящей системы  и упругого подвеса
и упругого подвеса  После этого окончательно соединяют блоки акселерометра между собой по первому варианту включения, если знаки коэффициентов
После этого окончательно соединяют блоки акселерометра между собой по первому варианту включения, если знаки коэффициентов  и
и  одинаковы, и по второму варианту включения, если знаки этих коэффициентов противоположны. 3 ил.
одинаковы, и по второму варианту включения, если знаки этих коэффициентов противоположны. 3 ил.
СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА, заключающийся в том, что в собранном акселерометре определяют температурные погрешности отдельных блоков акселерометра, затем с помощью вспомогательных элементов изменяют температурные характеристики акселерометра в сторону уменьшения температурных погрешностей, отличающийся тем, что, с целью уменьшения аддитивной погрешности акселерометра, предварительно соединяют блоки акселерометра между собой установленной полярностью входных и выходных клемм блоков, измеряют значение аддитивного выходного сигнала акселерометра при этом первом варианте соединения и двух значениях температуры окружающей среды, меняют при втором варианте полярности соединения блоков между собой и повторяют измерения при тех же двух значениях температур окружающей среды, по результатам всех измерений определяют значения и знаки температурных коэффициентов аддитивной погрешности, обусловленной изменением характеристик следящей системы Kс и упругого подвеса Kу, после чего окончательно соединяют блоки акселерометра между собой по первому варианту включения, если знаки коэффициентов Kс и Kу одинаковы, и по второму варианту включения, если знаки этих коэффициентов противоположны.
| Performance characteristics and methds of testing of force - Feed-back accelerometers | |||
| "Reports and Memoranda", 1967, August, N 361 | |||
| Приспособление для опоражнивания открытых котлов | 1926 |
|
SU12183A1 |
