Изобретение относится к приборам гидроакустического противодействия (ГПД), в частности к устройствам, имитирующим подводную лодку (ПЛ).
Известен прибор помех AN/BLQ-9 гидроакустическим станциям (ГАС) противолодочного корабля (КПЛО), используемый также для имитации шума (ПЛ). Недостаток AN/BLQ-9 заключается в том, что его малоразмерный высокооборотный движитель излучает шум с дискретными составляющими (ДС), отличающимися от ДС движителя имитируемой ПЛ. Данное отличие (ДС AN/BLQ-9 значительно выше по частоте ДС ПЛ) является классификационным признаком, снижающим достоверность имитации ПЛ прибором AN/BLQ-9.
Известен самоходный имитатор ПЛ (СИПЛ) Мк-30, содержащий корпус торпедообразной формы, в котором расположен источник электроэнергии, подключенный через блок программного управления к приборам ГПД, а также подключенный к электродвигателю, который соединен парой гребных валов с движителем, выполненным из двух соосно разностороннего вращения винтов, закрепленных на соответствующих внутреннем и внешнем гребных валах.
Недостатком прототипа является низкая достоверность имитации первичного гидроакустического поля (ПГАП) ПЛ, т.е. звукопортрета ПЛ. В ПГАП, имитируемое Мк-30, добавляется сильное шумоизлучение движителя, которое отличается от шумоизлучения ПЛ. В результате анализа оператор ГАС КПЛО безошибочно определяет наличие в ПГАП цели шума малоразмерного высокооборотного движителя, характерного для имитатора (СИПЛ), и классифицирует цель как ложную.
Цель изобретения - повышение достоверности имитации (ПГАП) ПЛ.
Цель достигается тем, что в известный СИПЛ, содержащий корпус торпедообразной формы, в котором расположены источник электроэнергии, подключенный через блок программного управления к приборам гидроакустического противодействия, а также подключенный к электродвигателю, который соединен парой гребных валов с движителем, выполненным из двух соосных разностороннего вращения винтов, закрепленных на соответствующих внутреннем и внешнем гребных валах, дополнительно внесены изменения в виде механического устройства излучения ДС, адекватных ПЛ заданного проекта, которое выполнено в виде дополнительно удлиненного внутреннего гребного вала, на котором закреплены N винтов одной стороны вращения, на внешнем гребном валу дополнительно размещены не менее двух радиально расположенных креплений, к которым закреплены лопасти N винтов другой стороны вращения, причем эти винты посажены на подшипники, внутренние кольца которых закреплены на дополнительно удлиненном внутреннем гребном валу, чередуясь с винтами первой стороны вращения по всей его длине, расстояние между винтами первой - второй сторон вращения одинаково, а количество пар винтов первой - второй сторон вращения, определяющих величину удлинения вала, равно n2/n1, где n1 - число оборотов в минуту винтов ПЛ для выбранной скорости вращения заданного проекта ПЛ; n2 - число оборотов в минуту валов движителя СИПЛ заданного проекта (ПЛ), соответствующее выбранной скорости.
Отличительные признаки технического решения:
1) удлинение внутреннего гребного вала для размещения увеличенного количества N винтов одной стороны вращения;
2) дополнительное размещение на внешнем гребном валу не менее двух радиально расположенных креплений, к которым закреплены лопасти N винтов другой стороны вращения, причем эти винты насажены на подшипники, внутренние кольца которых закреплены на дополнительно удлиненном внутреннем гребном валу, чередуясь с винтами первой стороны вращения по всей его длине, при этом расстояние между винтами первой - второй сторон вращения одинаково;
3) количество N пар винтов первой - второй сторон вращения, определяющих величину удлинения вала, и размеры радиально расположенных креплений равны n2/n1, где n1 - число оборотов в минуту винтов ПЛ для выбранной скорости применения заданного проекта ПЛ; n2 - число оборотов в минуту валов движителя самоходного имитатора подводной лодки заданного проекта, соответствующее выбранной скорости. Анализ технического решения показал, что заявляемая совокупность признаков проявляет новые свойства:
1) устранение классификационного признака малоразмерного высокооборотного движителя при сохранении скоростных качеств;
2) частота ДС звукоизлучения адекватна частотам ДС ПЛ заданного проекта для выбранной скорости применения;
3) увеличена объемность источника звукоизлучения (без увеличения размеров винтов за габариты СИПЛ и торпедного аппарата, через который осуществляется его постановка).
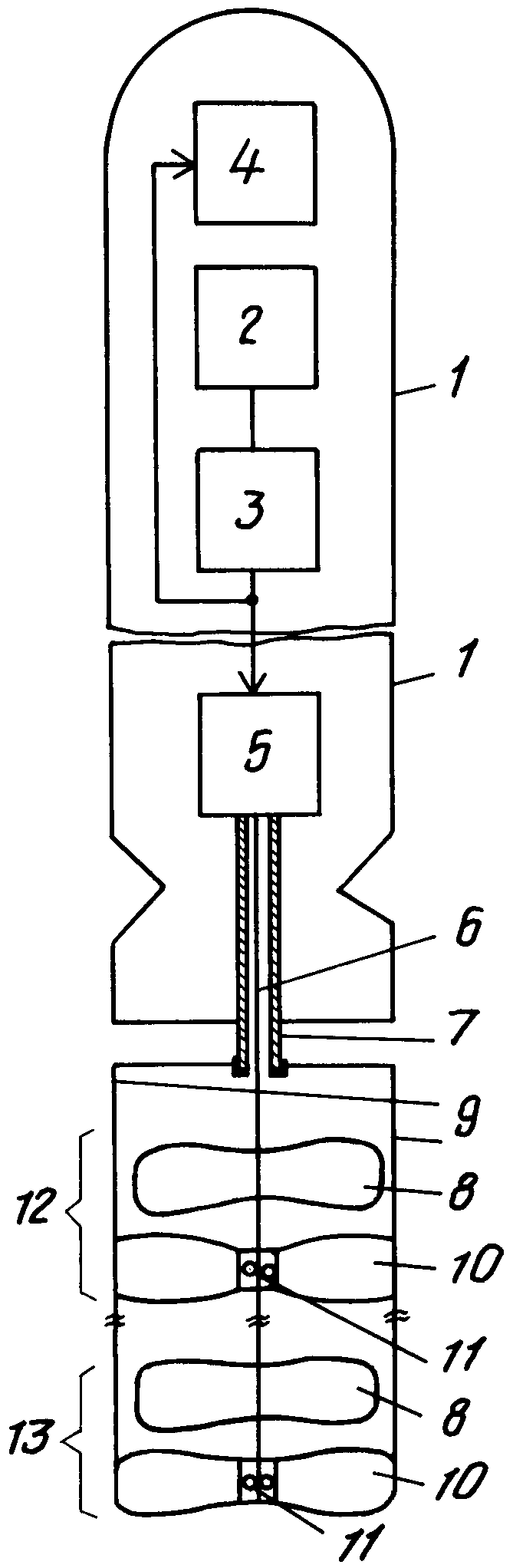
На чертеже приведено устройство СИПЛ, где обозначено:
1 - корпус торпедообразной формы;
2 - источник электроэнергии;
3 - блок программного управления;
4 - приборы ГПД;
5 - электродвигатель;
6 - дополнительно удлиненный внутренний гребной вал;
7 - внешний гребной вал;
8-1-N - винты одной стороны вращения;
9 - не менее двух радиально расположенных креплений;
10-1-N - винты другой стороны вращения;
11-1-N - подшипники, внутренние кольца которых закреплены на дополнительно удлиненном внутреннем гребном валу;
12 - первая пара винтов первой-второй сторон вращения;
13 n2/n1 - пара винтов первой-второй сторон вращения.
СИПЛ состоит из корпуса 1 торпедообразной формы в котором расположены источник 2 электроэнергии, подключенный через блок 3 программного управления к приборам 4 ГПД, а также подключенный к электродвигателю 5, который соединен парой гребных валов с винтами, при этом на дополнительно удлиненном внутреннем гребном валу 6 закреплены N-винтов одной стороны 8 вращения, на внешнем гребном валу 7 дополнительно размещены не менее двух радиально расположенных 9 креплений, к которым закреплены лопасти N винтов другой стороны 10 вращения, причем эти винты посажены на подшипники 11, внутренние кольца которых закреплены на дополнительно удлиненном внутреннем гребном валу 6, чередуясь с винтами первой стороны 8 вращения по всей его длине, расстояние между винтами первой-второй сторон вращения одинаково, а количество пар винтов первой-второй сторон вращения, определяющих величину удлинения вала и радиально расположенных креплений 9, равно (целому от деления) n2/n1, где n1 - число оборотов в минуту винтов ПЛ для выбранной скорости применения заданного проекта ПЛ; n2 - число оборотов в минуту валов 6 и 7 движителя СИПЛ заданного проекта, соответствующее выбранной скорости.
Устройство работает следующим образом.
СИПЛ по команде блока 3 программного управления включает приборы 4 ГПД и электродвигатель 5. Электродвигатель 5 вращает пару гребных валов с числом оборотов n1. Движение передается винтам первой-второй сторон вращения, обеспечивая выбранную скорость применения, равную скорости ПЛ заданного проекта, применяющей СИПЛ.
Предлагаемое устройство 1 устраняет классификационный признак малоразмерного высокооборотного движителя; приводит к получению объемного протяженного мощного источника дискретных составляющих соответствующих ДС ПЛ заданного проекта на выбранной скорости (максимально малошумной) применения СИПЛ. Это позволяет повысить достоверность имитации (ПГАП) ПЛ заданного проекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ИЗЛУЧЕНИЯ ЗВУКА ПОДВОДНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2014 |
|
RU2587117C2 |
| КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2770388C1 |
| САМОХОДНЫЙ ИМИТАТОР ПОДВОДНОЙ ЛОДКИ | 1991 |
|
RU2022872C1 |
| ИМИТАТОР ПОДВОДНОЙ ЛОДКИ | 1991 |
|
RU2014244C1 |
| СПОСОБ ИМИТАЦИИ ПОДВОДНЫХ ЛОДОК ПРИ ПРОВЕДЕНИИ УЧЕНИЙ | 2021 |
|
RU2761937C1 |
| БУКСИРУЕМЫЙ МОДУЛЬ ПОДВОДНОЙ АНТЕННОЙ РЕШЕТКИ | 1991 |
|
RU2014631C1 |
| ПОДВОДНЫЙ АППАРАТ КОМПЛЕКСНЫЙ | 2016 |
|
RU2640598C1 |
| КОМПЛЕКС ЛОЖНЫХ МОРСКИХ ЦЕЛЕЙ | 2012 |
|
RU2511211C2 |
| ПОДВОДНЫЙ АППАРАТ-ОХОТНИК | 2017 |
|
RU2654435C1 |
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
Изобретение относится к приборам гидроакустического противодействия, используемым для имитации подводной лодки. Цель - повышение достоверности имитации первичного гидроакустического поля подводной лодки. Цель достигается тем, что в самоходном имитаторе подводной лодки винтовой движитель выполнен в виде удлиненного внутреннего гребного вала, на котором закреплены винты первой стороны вращения, а также второй стороны вращения, на которой дополнительно размещены два радиально расположенных крепления винтов внешнего вала, причем вторые концы каждого из винтов внешнего вала закреплены к внешнему кольцу соответствующего подшипника, кроме того внутренние кольца подшипников закреплены на удлиненном внутреннем валу, причем винты внутреннего вала и винты внешнего вала, чередуясь, размещены по всей длине удлиненного внутреннего вала, расстояние между винтами первой - второй сторон вращения одинаково, а количество пар винтов первой - второй сторон вращения, определяющих величину удлинения валов, равно n2/n1, где n1 - число оборотов в минуту винтов подводной лодки для выбранной скорости применения имитатора заданного проекта подводной лодки; n2 - число оборотов в минуту валов движителя самоходного имитатора подводной лодки заданного проекта, соответствующее выбранной скорости. 1 ил.
САМОХОДНЫЙ ИМИТАТОР ПОДВОДНОЙ ЛОДКИ, содержащий корпус торпедообразной формы, в котором расположены источник электроэнергии, подключенный через блок программного управления к приборам гидроакустического противодействия, а также подключенный к электродвигателю, который соединен парой гребных валов с движителем, выполненным из двух соосных разностороннего вращения винтов, закрепленных на соответствующих внутреннем и внешнем гребных валах, отличающийся тем, что он дополнен механическим устройством излучения дискретных составляющих, адекватных подводной лодке заданного проекта, которое выполнено в виде дополнительно удлиненного внутреннего вала, на котором закреплены N винтов одной стороны вращения, на внешнем гребном валу дополнительно размещены не менее двух радиально расположенных креплений, к которым закреплены лопасти N винтов другой стороны вращения, причем эти винты посажены на подшипники, внутренние кольца которых закреплены на дополнительно удлиненном внутреннем гребном валу, чередуясь с винтами первой стороны вращения по всей его длине, расстояние между винтами первой-второй сторон вращения одинаково, а количество пар винтов первой-второй сторон вращения, определяющих величину удлинения вала, равно N2/H1, где N1 - число оборотов в 1 мин винтов подводной лодки для выбранной скорости применения заданного проекта подводной лодки, N2 - число оборотов в 1 мин валов движителя самоходного имитатора подводной лодки заданного проекта, соответствующее выбранной скорости.
| Пирумов В.С., Червинский Р.А | |||
| Радиоэлектроника в войне на море | |||
| М.: Воениздат, 1987, с.100. |
