Изобретение относится к средствам размещения, выпуска буксирных устройств или необитаемых подводных аппаратов (АНПА) и приема подводных объектов, в частности к способу приема АНПА в подводную лодку (ПЛ) в подводном положении и устройству для его осуществления.
Известен способ приема необитаемых подводных аппаратов (НПА) в подводную лодку в подводном положении, описанный в работе [Необитаемые подводные аппараты военного назначения / сост.: М.Д.Агеев, Л.А.Наумов и др.; под ред. Академика РАН М.Д.Агеева. - Владивосток.: Дальнаука, 2005, с.28-31; информация взята из источников: 1. Inside The Navy. - 2002. - V.15. - №6. - P.15; 2. Warship Technology. - 2000. - May. - P.6, 7].
В рамках выполнения ВМС США программы создания системы минной разведки LMRS (Long-term Mine Reconnaissance System) создана система, получившая обозначение AN/BLQ-11. Система состоит из двух НПА, управляемых по оптоволоконному кабелю, а также комплекта корабельного и берегового оборудования.
Сами аппараты и их корабельное оборудование на период выполнения боевой задачи размещаются на стеллажах торпедного отсека атомных подводных лодок типов "Los Angeles" и "Virginia".
Способ приема НПА, работа которого осуществляется по заданной программе, заключается в перемещении НПА с помощью его собственного движителя по гидроакустическим сигналам своей гидроакустической станции (ГАС) к нижнему носовому торпедному аппарату одного борта ПЛ, захвате НПА телескопическим манипулятором и направлении его в нижний торпедный аппарат.
Способ реализуют с помощью устройства для приема НПА, включающего два торпедных аппарата одного борта ПЛ и телескопический манипулятор, расположенный в верхнем торпедном аппарате [Необитаемые подводные аппараты военного назначения / сост.: М.Д.Агеев, Л.А.Наумов и др.; под ред. Академика РАН М.Д.Агеева. - Владивосток.: Дальнаука, 2005, с.28-31].
К недостаткам известного способа при его реализации в описанном устройстве относятся:
- необходимость стабилизации глубины погружения атомной ПЛ без ее хода в период приема АНПА на ПЛ;
- сложность управления телескопическим манипулятором при его захвате и направлении НПА в торпедный аппарат;
- риск взаимных повреждений НПА и атомной ПЛ в случае неточности маневрирования НПА или работы телескопического манипулятора на ПЛ.
Наиболее близким по технической сущности к заявляемому способу является способ приема НПА в трубу носового торпедного аппарата, описанный в работе [Необитаемые подводные аппараты военного назначения / сост.: М.Д.Агеев, Л.А.Наумов и др.; под ред. Академика РАН М.Д.Агеева. - Владивосток.: Дальнаука, 2005, с.25-27; информация взята из источников: 1. Jane's Fighting Ships. - 1997-1998. - P.795; 2. Sea Technology. - 1991. - №12. - P.32-35; 3. Warship Technology. - 2000. - May. - P.6, 7].
В рамках выполнения ВМС США программы, получившей на первом этапе наименование "Срочная система минной разведки" - NMRS (Near-term Mine Reconnaissance System), а на втором - "Долгосрочная система минной разведки" FTRS (Far-term Reconnaissance System), разработаны НПА, возвращаемые на ПЛ и управляемые по оптоволоконному кабелю. Система включает два НПА, оборудование для их выпуска и приема, а также систему управления и контроля на борту ПЛ.
НПА выпускается через торпедный аппарат и выходит наружу под действием собственного движителя, после чего он остается связанным с ПЛ с помощью стального кабель-троса и оптоволоконного кабеля, поддерживаемых буями.
Способ приема НПА в трубу носового торпедного аппарата ПЛ в подводном положении осуществляют путем затягивания его с помощью лебедки, выбирающей стальной кабель-трос. Привязной АНПА перемещают к носовой части ПЛ, снижают его скорость и стопорят движитель. На заключительном этапе приема АНПА на кабель-тросе медленно лебедкой затягивают в трубу носового торпедного аппарата ПЛ и размещают в отсеке на стеллаже.
Этот способ реализуют с помощью устройства, включающего лебедку со стальным кабель-тросом, буи и систему управления и контроля на борту ПЛ. Стальной кабель-трос и оптоволоконный кабель поддерживаются буями [Необитаемые подводные аппараты военного назначения / сост.: М.Д.Агеев, Л.А.Наумов и др.; под ред. Академика РАН М.Д.Агеева. - Владивосток.: Дальнаука, 2005, с.25].
Недостатками способа-прототипа при его реализации с помощью описанного устройства являются:
- ограничение маневренности АНПА и ПЛ длиной кабель-троса и оптоволоконного кабеля и наличием буев, что непосредственно сказывается на выполнении задач, поставленных перед АНПА;
- необходимость стабилизации глубины погружения ПЛ без ее хода в период приема АНПА на ПЛ;
- предрасположенность буксирного кабель-троса и оптоволоконного кабеля с буями к запутыванию как при маневрировании АНПА и ПЛ, так и при приеме АНПА на борт ПЛ.
Наиболее близким по технической сущности к заявленному устройству является устройство для возвращения в подводную лодку автономных необитаемых подводных аппаратов специального назначения [Пат. США №5447115, МКИ6 В63G 8/00, Moody Paul E.: The USA Secretary of the Navy. - №269430; заявл. 30.06.94; опубл. 05.09.95; НКИ 114/312].
Система возвращения АНПА, используемая в соединении с трубой торпедного аппарата подводной лодки, включает внешний цилиндр, предназначенный для стыковки с трубой торпедного аппарата внутри подводной лодки, причем в задней части внешнего цилиндра имеются вводы под кабель-трос и штуцер трубопровода насоса. Устройство включает три телескопических выдвигающихся концентричных полых цилиндра с каналами между ними, через которые соответствующие пространства устройства системы заполняются забортной водой. При этом во внутренний цилиндр, имеющий с одной стороны раструб, установлен привязной подводный аппарат, возвращающий АНПА в ПЛ (ПАВ), удерживаемый шариковым замком и кабель-тросом в цилиндре. В носовой части ПАВ имеется выступ для стыковки с возвращаемым АНПА, а в кормовой части - гребной винт в ограждении и рули управления аппаратом.
В торпедном отсеке подводной лодки за внешним цилиндром установлена лебедка, втягивающая ПАВ вместе с АНПА в торпедный аппарат подводной лодки. Операция по возвращению в подводную лодку АНПА начинается со стыковки переднего фланца внешнего цилиндра устройства системы возвращения с торпедным аппаратом. Затем передняя крышка торпедного аппарата открывается и торпедный аппарат и устройство заполняются забортной водой. Насос нагнетает воду в пространство за вставкой с шаровым замком и ПАВ. После этого вода выталкивает из наружного цилиндра два телескопических внутренних цилиндра, причем во втором находится ПАВ. В это время АНПА, движущийся впереди подводной лодки, останавливается за носовой частью подводной лодки перед вырезом в легком корпусе подводной лодки (где расположены ее торпедные аппараты). ПАВ, двигаясь своим ходом, из внутреннего цилиндра через торпедный аппарат покидает этот торпедный аппарат подводной лодки. Затем ПАВ с помощью системы самонаведения находит АНПА и, используя свой носовой выступ, стыкуется с конической кормой частью АНПА. Лебедка, расположенная в торпедном отсеке ПЛ, втягивает состыкованные ПАВ и АНПА во внутренний цилиндр, пока коническая кормовая часть АНПА не войдет в раструб цилиндра. После этого все устройство системы возвращения с ПАВ и АНПА втягивается лебедкой в трубу торпедного аппарата, причем внутренние телескопические цилиндры складываются. Передняя крышка торпедного аппарата закрывается, торпедный аппарат и полости устройства системы возвращения осушаются, после чего открывается задняя крышка торпедного аппарата, из трубы торпедного аппарата (ТА) извлекается сначала устройство системы возвращения, а затем АНПА.
Недостатками устройства-прототипа являются:
- необходимость стабилизации подводной лодки без ее хода при приемке АНПА в подводную лодку;
- необходимость стабилизации глубины погружения подводной лодки в момент приемки АНПА на борт подводной лодки;
- риск потери АНПА из-за отказа системы наведения или стыковочного узла ПАВ;
- предрасположенность кабель-троса к запутыванию, провисанию и обрывам в случае его наматывания на стабилизаторы рулей управления, гребной винт движителя, корпус ПАВ или АНПА в процессе поиска и стыковки с АНПА;
- предрасположенность кабель-троса к запутыванию и обрывам вследствие его малоподвижности и провисания в процессе выборки лебедкой;
- ограничение длиной кабель-троса маневренности ПАВ при поиске, подходе и стыковке с АНПА;
- риск взаимного повреждения ПАВ или АНПА в случае неточности маневрирования ПАВ при стыковке с АНПА;
- риск взаимного повреждения узлов системы возвращения ПАВ или АНПА о корпус и выступающие части подводной лодки при втягивании лебедкой ПАВ с АНПА в трубу торпедного аппарата ПЛ.
Технический результат изобретения состоит в разработке способа и устройства для надежного приема автономного необитаемого подводного аппарата в подводную лодку в подводном положении на ходу ПЛ.
Он достигается тем, что в способе приема автономного необитаемого подводного аппарата в подводную лодку в подводном положении через трубу посредством буксирного кабель-троса и лебедки согласно изобретению автономный необитаемый подводный аппарат оснащают системой гидроакустической связи, средством для стыковки в виде приемной стропы с устройством захвата буксирного кабель-троса и устройством их выпуска, на ходовом конце буксирного кабель-троса предварительно закрепляют поплавок-отводитель, а между поплавком-отводителем и подводной лодкой размещают не менее двух гидроакустических маркеров, разнесенных между собой, затем кабель-трос с маркерами наматывают на лебедку, а поплавок-отводитель устанавливают в трубе и ставят на стопор, в процессе приготовления к выпуску снимают поплавок-отводитель со стопора, открывают доступ набегающего потока в носовую часть трубы и выпускают поплавок-отводитель вместе с буксирным кабель-тросом и маркерами, далее с гидроакустической станции подводной лодки подают переменное напряжение на гидроакустические маркеры, в результате чего маркеры излучают тональный сигнал, а в систему управления подводного аппарата по гидроакустическому каналу связи подают команду для перехода на выполнение программы постановки подводного аппарата на буксирный кабель-трос, по программе необитаемый подводный аппарат перемещают в заданную относительно маркеров позицию, затем с подводного аппарата выпускают приемную стропу с устройством захвата буксирного кабель-троса, разворачивают подводный аппарат относительно буксирного кабель-троса на траверзный курсовой угол и перемещают наперерез движению буксирного кабель-троса через участок между гидроакустическими маркерами, в результате пересучивания буксирного кабель-троса и приемной стропы осуществляют захват буксирного кабель-троса устройством захвата и фиксацию на нем подводного аппарата, далее затягивают аппарат в трубу с помощью лебедки.
Гидроакустические маркеры устанавливают на буксирном кабель-тросе на расстоянии 100-105 м друг от друга, при этом первый по отношению к подводной лодке маркер может быть установлен также на расстоянии 100-105 м от нее; посредством поплавка-отводителя ориентируют гидроакустические маркеры таким образом, чтобы первый маркер располагался в вертикальной плоскости ниже второго.
Заданная относительно гидроакустических маркеров позиция, в которую перемещают автономный необитаемый подводный аппарат, находится в точке, из которой курсовые углы на маркеры равны по величине - носовой курсовой угол на первый маркер равен кормовому курсовому углу на второй маркер и составляют 25-28°, а угол места первого маркера вниз от горизонтальной плоскости движения подводного аппарата превышает в 3 раза угол места второго маркера вверх от горизонтальной плоскости движения подводного аппарата.
Технический результат достигается также тем, что в устройстве для приема автономного необитаемого подводного аппарата в подводную лодку в подводном положении, содержащем средство для стыковки, расположенное на подводном аппарате, и установку, включающую трубу с подвижной и неподвижной частями, расположенную на подводной лодке, при этом в подвижной части трубы расположено приемное устройство, через которое проходит ходовой конец буксирного кабель-троса, намотанного на лебедку, закрепленного на ней коренным концом и электрически соединенного с гидроакустической станцией подводной лодки, согласно изобретению установка расположена в кормовом горизонтальном стабилизаторе подводной лодки, неподвижная кормовая часть трубы имеет заднюю крышку с приводом ее открывания и закрывания, а подвижная носовая часть трубы - переднюю, неподвижная и подвижная части трубы расположены в основании горизонтального стабилизатора подводной лодки и снабжены приводом стыковки и расстыковки кормовой и носовой частей трубы и передней крышки, выполняющим также функцию привода открывания и закрывания передней крышки, на ходовом конце буксирного кабель-троса закреплен поплавок-отводитель, между поплавком-отводителем и коренным концом буксирного кабель-троса установлены разнесенные друг от друга не менее двух гидроакустических маркеров, лебедка с намотанным на нее буксирным кабель-тросом с маркерами закреплена на подвижной части трубы в верхней передней ее части, а поплавок-отводитель вставлен в приемное устройство, в оконечности кормового горизонтального стабилизатора подводной лодки установлены кормовые щиты, прикрепленные к набору легкого корпуса стабилизатора, с приводом их открывания и закрывания, диффузор с носовым щитом и приводом его открывания и закрывания и установка снабжена кареткой носовой части трубы с приводом ее перемещения и направляющими дорожками трассы перемещения каретки, при этом носовая часть трубы установлена на каретке с возможностью продольного перемещения в ней и снабжена фланцами и направляющим штоком, введенным в направляющую дорожку перемещения штока, кормовая часть трубы и передняя крышка снабжены уплотнительными кольцами под фланцы, на носовой части трубы смонтированы стопор и прибор ввода данных, которые электрически соединены с боевой информационно-управляющей системой подводной лодки, средство для стыковки представляет собой приемную стропу с устройством захвата буксирного кабель-троса и устройством их выпуска, которое скомпоновано в обтекателе на контрпропеллере в кормовой части насадки водометного движителя, включающего гребное колесо со ступицей, которую в кормовой части насадки закрывает жесткая пробка, в которую ввернут стягивающий разрывной болт, при этом устройство содержит катушку, на которую кольцами намотана буксирная приемная стропа в виде кабель-троса с токоведущими жилами, которые посредством электроразъема электрически соединены с бортовой системой управления подводного аппарата, обтекатель через свое отверстие в вершине надет на стягивающий разрывной болт, приемная стропа в сложенном состоянии коренным концом прикреплена к устройству для подвеса необитаемого подводного аппарата, установленному в носовой части корпуса подводного аппарата с возможностью поворота этого устройства вокруг своей оси для надежной постановки подводного аппарата на буксирный кабель-трос, а на ходовом конце буксирной приемной стропы закреплено устройство захвата буксирного кабель-троса.
При этом буксирный кабель-трос представляет собой полипропиленовый трос с электрическим кабелем, например, марки СМ ПЭВГ - 100-4×I-1000 ТУ-16, оснащенный сигнально-разрывным пиротехническим устройством, которое расположено на расстоянии 1-2 м от поплавка-отводителя и выполнено, например, в виде контактной шайбы с электрозамыкателем и пиротехническим разрывным болтом.
Гидроакустические маркеры представляют собой сферические пьезоэлементы, выполненные из пьезокерамического состава ЦТБС-3 силовой конструкции и размером 20 и 10 мм для первого и второго маркеров соответственно, причем на сферической поверхности каждого пьезоэлемента припаяно по два электрода, электрически соединенных с жилами токоведущего кабеля буксирного кабель-троса, при этом пьезоэлементы вмонтированы в звукопрозрачную резину и помещены в каркас, набранный из стальных колец с проточками, по которым пропущены каболки буксирного кабель-троса.
Приемное устройство представляет собой раздвижной причальный конус, содержащий жесткую круглую воронку с центральным отверстием по диаметру, достаточному для прохода буксирного кабель-троса с маркерами, буксирной приемной стропы с кольцевым замком и контактной шайбы сигнально-разрывного пиротехнического устройства, при этом на воронке с помощью шарниров закреплены стальные спицы во фторопластовой оплетке для лучшего скольжения в трубе, положение спиц на воронке, сложенное и раскрытое в форме конуса, фиксируется с помощью капронового шнура, закрепленного в сверлениях в средней части спиц, на стальных спицах в сложенном состоянии прикреплена резиновая камера также с помощью капронового шнура, который в верхней части резиновой камеры через штреки и сверления на концах спиц прикреплен к этим спицам, а в нижней части резиновой камеры пропущен через пиротехнический резак, при этом в конструкции причального конуса в качестве одной из спиц используется стальная трубка с ниппелем для подачи азота в резиновую камеру, обеспечивающего максимальное раскрытие спиц причального конуса.
Стабилизирующий поплавок-отводитель представляет собой жесткий герметичный корпус с положительной плавучестью в виде тела вращения с оживальной носовой частью и конической хвостовой, на которой установлены три неподвижных вертикальных пера его горизонтального стабилизатора, при этом диаметр корпуса поплавка-отводителя выполнен под диаметр носовой части трубы. Поплавок-отводитель устанавливают на буксирном кабель-тросе на расстоянии 8-10 м от второго маркера.
Буксирная приемная стропа в кормовой части автономного необитаемого подводного аппарата на заднем срезе насадки водометного движителя удерживается, например, поддерживающим роликом, на нижнем ребре контрпропеллера насадки водометного движителя - вытяжным фиксатором, а вдоль всего корпуса АНПА - в раскрываемых ламелях.
Привод перемещения каретки носовой части трубы выполнен в виде барабана с тросом, один конец которого закреплен на барабане, а другой заведен на блоки, размещенные в оконечности кормового горизонтального стабилизатора подводной лодки, и закреплен на каретке, и барабана с кабель-тросом, один конец которого тросовой частью закреплен на барабане, электрической частью соединен с помощью скользящих контактов этого же барабана с боевой информационно-управляющей системой подводной лодки, второй конец кабель-троса тросовой частью закреплен на каретке, а электрической частью соединен с прибором ввода данных и стопором.
Привод стыковки и расстыковки кормовой и носовой частей трубы и передней крышки и приводы открывания и закрывания носового щита диффузора и кормовых щитов выполнены в виде передачи "винт-гайка", при этом гайка-ползун привода стыковки и расстыковки жестко закреплена на передней крышке, гайка-ползун привода открывания и закрывания носового щита снабжена пальцем, жестко закрепленным на щите, а к каждой гайке-ползуну привода кормовых щитов шарнирно прикреплен рычаг, соединенный шарнирно с соответствующим кормовым щитом.
Каретка выполнена с направляющими роликами, взаимодействующими с направляющими дорожками трассы перемещения каретки.
Устройства захвата буксирного кабель-троса выполнено в виде кольцевого замка из четырех кольцевых втулок в виде "кошки", который полым веретеном входит в стягивающий разрывной болт и в отверстие катушки, каждая кольцевая втулка замка выполнена в форме части полого тороида по диаметру меньше диаметра контактной шайбы сигнально-разрывного пиротехнического устройства, внутри втулки помещены кольцевой стержень, рабочая пружина, кольцевой стопор и рычаг, при этом на кольцевой стержень надета рабочая пружина, которая одним концом упирается в упорное кольцо кольцевой втулки, а другим - в упорное кольцо кольцевого стержня, упорные кольца жестко закреплены на кольцевой втулке и кольцевом стержне соответственно, в упорном кольце кольцевой втулки имеется отверстие, через которое свободно проходит кольцевой стержень, упорное кольцо кольцевого стержня свободно проходит внутри кольцевой втулки и выступает за габариты кольцевого стержня, стопор прикреплен к рычагу, который шарнирно закреплен на стойке и жестко прикреплен к кольцевой втулке, кольцевые втулки замка между собой скреплены кронштейнами, приваренными к веретену, причем кронштейны вверху имеют отверстия под фалы, которые расположены в верхней части замка и жестко заделаны в свободный конец буксирной приемной стропы, в нижней части веретена жестко заделана концевая стропа, пропущенная через пиротехнический резак этой стропы, который установлен в нижней части веретена и электрически соединен с электрозамыкателями кольцевого замка и бортовой системой управления автономного необитаемого подводного аппарата, каждый электрозамыкатель заделан в верхнюю кольцевую часть каждой втулки и электрически соединен с токоведущими жилами буксирной приемной стропы и бортовой системой управления подводного аппарата, в нижней части каждой кольцевой втулки и кольцевого стержня имеются сквозные сверления, в которые вставлена металлическая чека для фиксации кольцевого стержня в кольцевой втулке, при этом все четыре чеки выполнены в форме шпонки и соединены с концевой стропой с помощью капроновых шнуров, на концевой стропе закреплен стабилизирующий зонд, который через отверстие в своей вершине надет на стягивающий разрывной болт, концевая стропа и капроновые шнуры уложены кольцами на стержне стягивающего разрывного болта у нижней части кольцевых втулок.
Из известных нам источников информации не выявлены способ и устройство, которым присущи признаки, идентичные всем признакам предложенных нами изобретений. Следовательно, можно сделать вывод о соответствии заявляемых изобретений условию патентоспособности "новизна".
Из уровня техники нам известен способ [Патент №2183137, приоритет 14.02.2001, опубл. 10.06.2002, бюл. №16], который содержит признаки, общие с заявляемым способом.
Такими признаками являются:
- в трубе размещают буксирный кабель-трос с установленными на нем гидроакустическими маркерами и поплавком-отводителем, ставят поплавок-отводитель на стопор, в процессе приготовления к выпуску снимают со стопора, перемещают трубу в набегающий поток и производят выпуск буксирного кабель-троса с маркерами и поплавком-отводителем.
Известный способ (защищенный патентом №2183137) предназначен для выпуска АНПА, поэтому в трубе размещают не буксирный кабель-трос с гидроакустическими маркерами, а АНПА, ставят его на стопор, в процессе приготовления к выпуску снимают со стопора, перемещают трубу с АНПА в набегающий поток и производят выпуск.
Однако совокупность существенных признаков заявляемого способа не является идентичной всем признакам известного способа [Патент №2183137].
Отличительными от известного признаками заявляемого способа являются:
- оснащение автономного необитаемого подводного аппарата системой гидроакустической связи и средством для стыковки в виде приемной стропы с устройством захвата буксирного кабель-троса и устройством их выпуска;
- закрепление на ходовом конце буксирного кабель-троса поплавока-отводителя и размещение между поплавком-отводителем и подводной лодкой не менее двух гидроакустических маркеров, разнесенных между собой на 100-105 м;
- наматывание кабель-троса с маркерами на лебедку, размещение поплавка-отводителя в трубе и фиксация его на стопоре;
- в процессе приготовления к выпуску освобождение поплавока-отводителя от стопора, открывание доступа набегающего потока в носовую часть трубы и выпуск поплавока-отводителя вместе с буксирным кабель-тросом и маркерами;
- подача переменного напряжения на гидроакустические маркеры, в результате чего маркеры излучают тональный сигнал;
- подача команды по гидроакустическому каналу связи в систему управления подводного аппарата для перехода на выполнение программы постановки подводного аппарата на буксирный кабель-трос;
- перемещение по программе автономного необитаемого подводного аппарата в заданную относительно маркеров позицию;
- выпуск с подводного аппарата приемной стропы с устройством захвата и фиксации буксирного кабель-троса, разворот подводного аппарата относительно буксирного кабель-троса на траверзный курсовой угол и перемещение его наперерез движению буксирного кабель-троса через участок между гидроакустическими маркерами;
- захват буксирного кабель-троса устройством захвата в результате пересучивания буксирного кабель-троса и приемной стропы, фиксация на нем подводного аппарата, затягивание аппарата в трубу с помощью лебедки.
Известный способ (патент №2183137) обеспечивает только выпуск АНПА.
Новая совокупность известных и отличительных признаков заявляемого способа обеспечивает не только выпуск АНПА, но и надежный прием АНПА в подводную лодку в подводном положении на ее малом (инверсионном) ходу (при котором возможно управление ПЛ) путем постановки АНПА на буксирный кабель-трос (без непосредственного контакта АНПА с корпусом ПЛ) и затягивания кабель-троса с АНПА в причальный конус, установленный в подвижной трубе, которая расположена в горизонтальном стабилизаторе кормового отсека ПЛ.
Из уровня техники нам известно устройство [Патент №2183137, приоритет 14.02.2001, опубл. 10.06.2002, бюл. №16], которое содержит признаки, общие с заявляемым устройством. Такими признаками являются:
- расположенная в кормовом отсеке ПЛ труба с неподвижной кормовой и подвижной носовой частями с возможностью их стыковки;
- задняя крышка кормовой части трубы с приводом ее открывания и закрывания;
- передняя крышка носовой части трубы;
- кормовые щиты и диффузор канала с носовым щитом, расположенные в оконечности кормового горизонтального стабилизатора подводной лодки,
- привод открывания и закрывания кормовых щитов канала;
- привод открывания и закрывания носового щита диффузора;
- привод стыковки и расстыковки кормовой и носовой частей трубы и передней крышки, выполняющий также функцию привода открывания и закрывания передней крышки;
- каретка носовой части трубы с приводом ее перемещения и направляющими дорожками трассы перемещения каретки;
- носовая часть трубы установлена на каретке с возможностью продольного перемещения в ней и снабжена фланцами и направляющим штоком, введенным в направляющую дорожку перемещения штока;
- кормовая часть трубы и передняя крышка снабжены уплотнительными кольцами под фланцы;
- на носовой части трубы смонтированы стопор и прибор ввода данных, которые электрически соединены с боевой информационно-управляющей системой подводной лодки.
Однако совокупность существенных признаков заявляемого устройства не является идентичной всем признакам известного устройства [Патент №2183137].
В данном случае отличительными признаками являются:
- установленные в кормовом горизонтальном стабилизаторе ПЛ приемное устройство в виде причального конуса, расположенное в подвижной части трубы; лебедка с буксирным кабель-тросом, на котором установлены гидроакустические маркеры и поплавок-отводитель, при этом коренной конец кабель-троса закреплен на лебедке, ходовой конец проходит через приемное устройство, а лебедка установлена на подвижной части трубы в верхней передней ее части;
- установленные на АНПА средство для стыковки в виде приемной стропы с устройством захвата буксирного кабель-троса и устройством их выпуска.
Известное устройство [Патент №2183137] обеспечивает только выпуск объекта (АНПА) из подводной лодки.
Заявляемое устройство тоже может быть использовано для выпуска АНПА из подводной лодки (если использовать только признаки устройства, которые расположены в кормовом горизонтальном стабилизаторе кормового отсека ПЛ), но оно предназначено для надежного приема АНПА в подводную лодку.
Данная совокупность известных и отличительных существенных признаков обеспечивает получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны. Именно такая совокупность существенных признаков позволила разработать устройство для надежного приема АНПА в подводную лодку в подводном положении на ее малом ходу (при котором возможно управление ПЛ) путем постановки АНПА на буксирный кабель-трос (без непосредственного контакта АНПА с корпусом ПЛ) и затягивания кабель-троса с АНПА в причальный конус, установленный в подвижной трубе, которая расположена в горизонтальном стабилизаторе кормового отсека ПЛ.
На основании изложенного можно заключить, что совокупность существенных признаков заявляемых изобретений имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков заявляемых изобретений стало возможным решить поставленную задачу.
Следовательно, заявляемые способ и устройство соответствуют условию патентоспособности "изобретательский уровень", т.е. они явным образом не следуют из уровня техники и пригодны для промышленного применения.
Сущность изобретений поясняется чертежами.
На фиг.1 представлен фрагмент кормовой оконечности современной скоростной ПЛ с кормовым горизонтальным стабилизатором и устройством выпуска буксирного кабель-троса и приема АНПА, вид I сбоку - увеличено; на фиг.2 - устройство выпуска кабель-троса, установленное в носовой подвижной части трубы (перед выпуском кабель-троса), вид сверху; на фиг.3 - АНПА, принятый в причальный конус, втянутый лебедкой в носовую часть трубы, вид сверху; на фиг.4 - носовая часть трубы со сложенным причальным конусом; на фиг.5 - носовая часть трубы с причальным конусом в раскрытом состоянии конуса, вид I - нижний пружинный фиксатор на заднем срезе трубы - увеличено; на фиг.6 - привод открывания и закрывания кормовых щитов канала набегающего потока; на фиг.7 - привод открывания и закрывания носового щита диффузора канала набегающего потока; на фиг.8 - привод перемещения каретки в канал набегающего потока; на фиг.9 - АНПА с водометным движителем перед выпуском приемной стропы с кольцевым замком и стабилизирующим зондом; на фиг.10 - АНПА с водометным движителем после отстрела стягивающего разрывного болта и сброса обтекателя, вид I - увеличено; на фиг.11 - АНПА с водометным движителем после отстрела стягивающего разрывного болта, в момент сброса обтекателя, катушки и выпуска стабилизирующего зонда с кольцевым замком (вид I - увеличено, вид II - увеличено); на фиг.12 - ПЛ с буксируемым АНПА, захватившим кольцевым замком буксирный кабель-трос; вид I - (увеличено); на фиг.13 - кольцевой замок, присоединенный к приемной стропе АНПА для захвата и фиксации АНПА на буксирном кабель-тросе; на фиг.14 - позиция АНПА между маркерами в горизонтальной плоскости; на фиг.15 - позиция АНПА между маркерами в вертикальной плоскости.
Установка, расположенная в кормовом горизонтальном стабилизаторе кормового отсека подводной лодки, содержит трубу, состоящую из неподвижной кормовой части 1 трубы с уплотнительным кольцом 2, задней крышкой 3 с приводом ее открывания и закрывания 4 и подвижной носовой части 5-5 трубы с фланцами 6, направляющим штоком 7, стопором 8 и прибором ввода данных 9, переднюю крышку 10 с уплотнительным кольцом 11, направляющими роликами 12, зацепом 13 и телескопическими патрубками 14 системы затопления и осушения.
На подвижной носовой части трубы в верхней передней ее части установлена лебедка 15 с собранным на барабане (не показано) буксирным кабель-тросом 16, при этом коренной конец кабель-троса жестко закреплен на барабане лебедки 15, а на его ходовом конце расположены два гидроакустических маркера 17-17 (первый, ближний к ПЛ, и второй), разнесенные на 100-105 м один от другого, при этом первый маркер находится на расстоянии 100-105 м от подводной лодки (ее кормового отсека).
На концевой части буксирного кабель-троса 16 на расстоянии 8-10 м от второго гидроакустического маркера 17 расположен поплавок-отводитель (буксирный кабель-трос "заканчивается" поплавком-отводителем), а на расстоянии 1-2 м от него установлено сигнально-разрывное пиротехническое устройство 18, заделанное в буксирный кабель-трос.
Сигнально-разрывное пиротехническое устройство 18 конструктивно может быть выполнено одним узлом, например, в виде контактной шайбы с электрозамыкателем и пиротехническим разрывным болтом и предназначено для сигнализации на ПЛ об окончательной постановке АНПА на буксирный кабель-трос 16 и для разрыва кабель-троса и освобождения от него поплавка-отводителя 19.
Буксирный кабель-трос 16 представляет собой силовую конструкцию, например, в виде полипропиленового троса с электрическим кабелем (например, марки СМ ПЭВГ - 100-4×I-1000 ТУ-16) длиной 208-220 м с токоведущими жилами для обеспечения работы двух электроцепей, осуществляющих сигнализацию на ПЛ об окончательной постановке АНПА на буксирный кабель-трос и разрыв пиротехнического разрывного болта с целью отстыковки буксирного кабель-троса от поплавка-отводителя 19.
Стопор 8 и прибор ввода данных 9 смонтированы на носовой части трубы 5-5. К входу прибора ввода данных 9 подключен герморазъем (не показано), первый вход которого соединен с кабель-тросом 16 для подачи переменного напряжения с ГАС ПЛ на маркеры 17-17 и для подачи электропитания на сигнально-разрывное пиротехническое устройство 18 для отстыковки стабилизирующего поплавка-отводителя 19 от кабель-троса 16, второй вход герморазъема соединен с электрозамыкателем электрической цепи сигнализации на ПЛ о постановке АНПА на буксирный кабель-трос 16 и электроцепью электропитания для разрыва пиротехнического разрывного болта, третий вход герморазъема подключен к силовой электроцепи электропитания лебедки 15 и электроцепи электромеханического стопора 8, а четвертый вход герморазъема электрически соединен с боевой информационно-управляющей системой (не показано) на борту ПЛ.
Гидроакустические маркеры 17-17 представляют собой сферические пьезоэлементы (не показано), выполненные, например, из пьезокерамического состава ЦТБС-3 силовой конструкции и размером 20 и 10 мм для переднего и концевого маркеров соответственно. На сферической поверхности каждого пьезоэлемента припаяно по два электрода (не показано), электрически соединенных с жилами токоведущего кабеля буксирного кабель-троса 16. Пьезоэлементы вмонтированы в звукопрозрачную резину (не показано) и помещены в каркас (не показано), набранный из стальных колец с проточками (не показано), по которым пропущены каболки (не показано) буксирного кабель-троса 16. Жилы токоведущего кабеля буксирного кабель-троса электрически соединены с ГАС ПЛ.
Во внутренней носовой части 5-5 трубы под лебедкой 15 (расположенной на трубе) установлен выключатель 20 электродвигателя (не показано) лебедки.
В нижней носовой части 5-5 трубы установлен баллон 21 с жидким полимером, например, высокодисперсным фторполимером "Форум" (ТУ 2229 - 004-02698192 - 2002) для обеспечения минимальной силы трения между трущимися деталями при приеме АНПА в носовую часть трубы.
Для подачи жидкого полимера из баллона 21 под давлением во внутреннюю проточную носовую часть 5-5 трубы предусмотрен электрозамыкатель 22 и электропневмоклапан с редуктором 23 в электрической цепи с автономным источником электропитания (не показано).
В кормовом отсеке ПЛ на штатном месте расположен складной причальный конус 24, в который вставлен стабилизирующий поплавок-отводитель 19, который предназначен для того, чтобы поднять над хвостовой частью ПЛ и ее гребным винтом 25 буксирный кабель-трос 16 и расположить маркеры 17-17 один выше другого (передний ниже концевого) в стороне от кормового горизонтального 26 и вертикального (не показано) стабилизаторов и винта 25 ПЛ по ходу (по курсу) за кормой ПЛ. Он представляет собой, например, металлический герметичный корпус с положительной плавучестью в виде тела вращения с оживальной носовой частью и конической хвостовой. На конической хвостовой части поплавка-отводителя 19 установлены три неподвижных вертикальных пера его горизонтального стабилизатора. Диаметр корпуса поплавка-отводителя 19 выполнен под диаметр носовой 5-5 части трубы. Как упоминалось выше, в 1-2 м от носовой части поплавка-отводителя 19 в кабель-трос 16 заделано сигнально-разрывное пиротехническое устройство 18. При этом жилы токоведущего кабеля буксирного кабель-троса 16 электрически соединены с электросхемой, находящейся на ПЛ, с помощью которой управляют работой сигнально-разрывного пиротехнического устройства 18.
Поплавок-отводитель 19 снабжен гидростатическим клапаном самозатопления (не показано).
Причальный конус представляет собой жесткую конструкцию, состоящую, например, из круглой в виде оживала металлической воронки 27 с центральным отверстием 28 по диаметру, достаточному для прохода через это отверстие кабель-троса 16 с маркерами 17-17. Во внутренней части корпуса воронки 27 установлен утапливаемый электрозамыкатель 29 для подачи автономного электропитания (не показано) на электрозапал пиротехнического резака 30. Воронка 27 закрепляется, например, тремя пружинными фиксаторами 31 в круговой проточке заднего среза 32 носовой части 5-5 трубы. Наиболее оптимальным является закрепление пружинными фиксаторами воронки со спицами в трех местах для исключения поперечного перекоса воронки со спицами при выходе спиц из трубы. На воронке 27 с помощью шарниров 33 закреплены стальные спицы 34 во фторопластовой оплетке для лучшего скольжения в трубе 5. Положение спиц 34 на воронке 27 (сложенное и раскрытое в форме конуса) фиксирует капроновый шнур 35, закрепленный в сверлениях (не показано) в средней части спиц. На стальных спицах 34 в сложенном состоянии прикреплена резиновая камера 36, например, с помощью капронового шнура (не показано), который в верхней части резиновой камеры через штреки (не показано) и сверления (не показано) на концах спиц прикреплен к этим спицам, а в нижней части резиновой камеры этот фиксирующий шнур пропущен через пиротехнический резак 30. При этом в конструкции причального конуса 24 в качестве одной из спиц используется стальная трубка 37 (спица-трубка) с ниппелем (не показано) для подачи, например, азота из баллона 38 через штуцер (не показано) по резиновой трубке 39 в резиновую камеру 36, обеспечивающую максимальное раскрытие спиц 34 причального конуса 24 после его выхода за задний срез 32 носовой части 5-5 трубы. Пиротехнический резак 30 через токоведущие жилы (не показано), проложенные в оплетке стальной спицы-трубки 37, соединен с источником автономного электропитания (не показано) и электрозамыкателем 40.
Электрозамыкатель 40 расположен у заднего среза 32 трубы 5 сразу перед воронкой 27 причального конуса 24 и служит для включения от источника автономного электропитания (не показано) электроцепи электропневмоклапана с редуктором 41 при подаче азота из баллона 38 в резиновую камеру 36.
Резиновая камера 36 снабжена гидростатическим клапаном самозатопления (не показано).
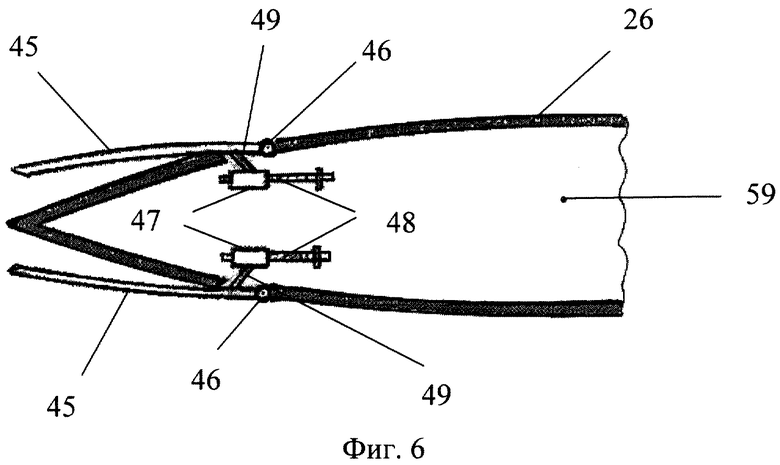
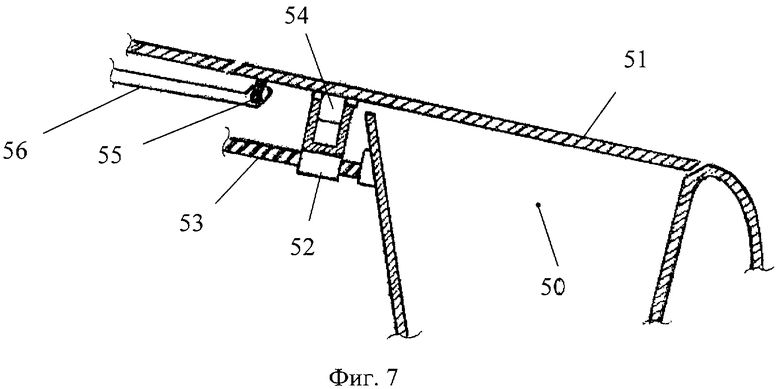
Кроме того, устройство содержит каретку 42 с двумя парами верхних 43 и нижних 44 направляющих роликов, в оконечности кормового горизонтального стабилизатора 26 подводной лодки установлены кормовые щиты 45, прикрепленные к набору легкого корпуса стабилизатора, например, с помощью шарниров 46, привод открывания и закрывания кормовых щитов 45, выполненный например, в виде передачи "винт-гайка", при этом к каждой гайке-ползуну 47, насаженной на винт 48, шарнирно прикреплен рычаг 49, соединенный шарнирно с соответствующим кормовым щитом 45, диффузор 50 с носовым щитом 51 и приводом его открывания и закрывания, выполненным также, например, в виде передачи "винт-гайка", при этом гайка-ползун 52 с втулкой насажена на винт 53, который одним концом закреплен на стенке диффузора 50 с возможностью осевого вращения, а другим - к своему электроприводу (не показано). Во втулку гайки-ползуна 52 помещен жестко закрепленный одним концом на носовом щите 51 палец 54 с возможностью продольного перемещения в ней в процессе открывания (закрывания) носового щита 51 диффузора 50.
Внутренняя стенка носового щита 51 диффузора 50, внешние стенки диффузора, внутренние стенки кормового горизонтального стабилизатора 26 подводной лодки и внутренние стенки кормовых щитов 45 образуют канал 59 набегающего потока вокруг носовой части трубы (после перемещения ее в оконечность кормового горизонтального стабилизатора 26).
Для обеспечения надежности работы к носовому щиту 51 прикреплен по меньшей мере один направляющий ролик 55, введенный в свою направляющую дорожку 56, прикрепленную к набору кормового горизонтального стабилизатора 26.
Для обеспечения стыковки и расстыковки кормовой 1 и носовой 5-5 частей трубы и передней крышки 10 устройство снабжено приводом, выполненным также, например, в виде передачи "винт-гайка", при этом гайка-ползун 57 насажена на винт 58 и жестко закреплена на передней крышке 10 с зацепом 13. Этот привод выполняет также функцию привода открывания и закрывания передней крышки 10.
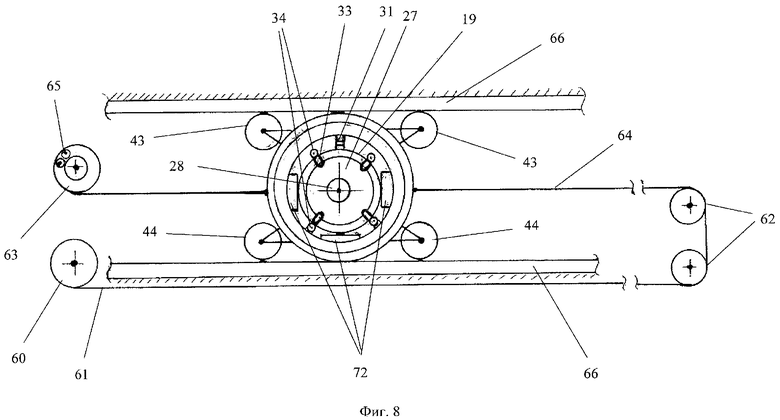
Носовая часть 5-5 трубы установлена в каретке 42. Для перемещения каретки с носовой частью трубы в оконечность кормового горизонтального стабилизатора и обратно она снабжена приводом, выполненным, например, в виде барабана 60 с тросом 61, один конец которого закреплен на барабане, а другой заведен на блоки 62, размещенные в оконечности горизонтального стабилизатора, и закреплен на каретке 42, и барабана 63 со своим кабель-тросом 64, один конец которого тросовой частью закреплен на барабане, а электрической частью соединен с помощью скользящих контактов 65 этого же барабана (во внутренней герметичной полости которого они расположены) с боевой информационно-управляющей системой ПЛ (не показано), второй конец кабель-троса 64 тросовой частью закреплен на каретке 42, а электрической частью (не показано) соединен с прибором ввода данных 9 и стопором 8. Каретка 42 с направляющими роликами (верхними 43 и нижними 44) установлена в направляющих дорожках 66, прикрепленных к набору корпуса кормового горизонтального стабилизатора 26 ПЛ. Шток 7 установлен в направляющую дорожку 67, благодаря чему носовая 5-5 часть трубы имеет возможность продольного перемещения внутри каретки 42. Уплотнительные кольца 2 и 11 (кормовой части 2 трубы и передней крышки 10 соответственно) под фланцы 6 обеспечивают герметичность трубы 5 в состыковочном состоянии (носовой и кормовой частей и передней крышки).
Кормовая 1 часть трубы жестко закреплена в переборочном стакане 68, который вварен в кормовую оконечность 69 прочного корпуса ПЛ. Через сальник 70 кормовой оконечности 69 прочного корпуса ПЛ проходит вал 71, механически связанный с винтом 58 привода стыковки и расстыковки кормовой 1 и носовой 5-5 частей трубы и передней крышки 10. Через подобные сальники введены в прочный корпус ПЛ приводные валы (не показано) барабанов 60 и 63 и валы (не показано) приводов открывания и закрывания носового щита 51 диффузора 50 и кормовых щитов 45, причем изменение направления валов приводов открывания и закрывания в полости кормового горизонтального стабилизатора 26 и легкого корпуса кормового отсека ПЛ осуществляется, например, с помощью карданных соединений (не показано). Кроме того, внутри носовой части трубы имеются роликовые направляющие дорожки 72 для установки на них стабилизирующего поплавка-отводителя, вставленного в причальный конус (или АНПА в случае его выпуска), и принимаемого АНПА. Передняя крышка 10 удерживается от вертикальных перемещений приводом стыковки и расстыковки кормовой и носовой частей трубы и передней крышки (в виде передачи "винт-гайка", поз.57, 58), а от осевых - направляющими роликами 12, введенными в их направляющую дорожку (не показано).
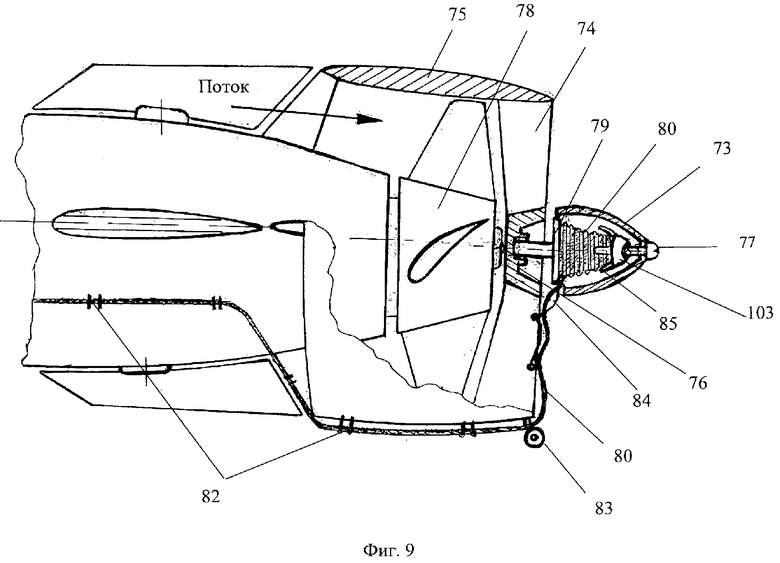
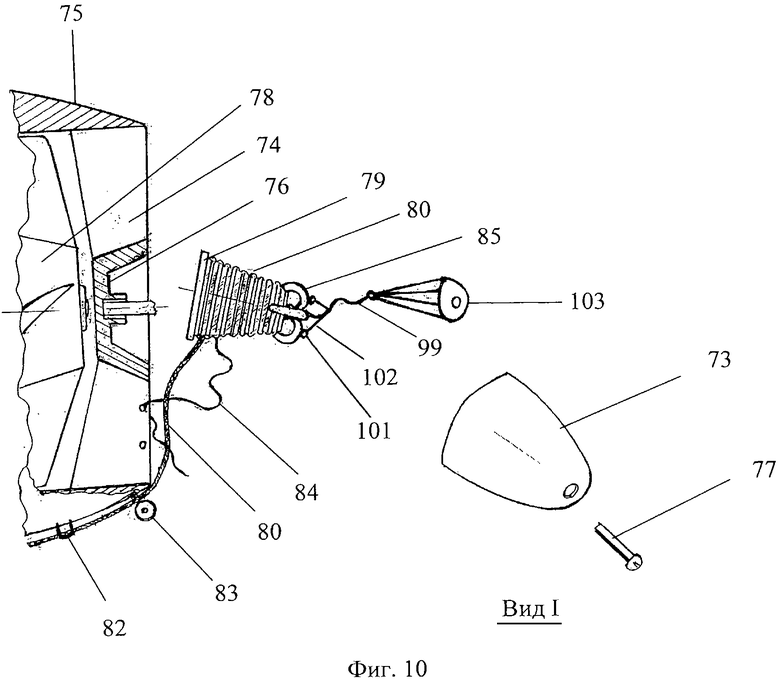
Устройство для выпуска буксирной приемной стропы находится в кормовой части АНПА и скомпоновано в обтекателе 73 на контрпропеллере 74 в задней части насадки 75 водометного движителя. В середине насадки расположена металлическая пробка 76, в которую ввернут на резьбе стягивающий разрывной болт 77, причем пробка 76 закрывает торцевую часть ступицы 78 гребного колеса насадки 75 водометного движителя.
Устройство для выпуска приемной стропы, расположенное внутри обтекателя, содержит катушку 79, например, конической формы (в форме усеченного конуса), на которой уложена кольцами ходовая часть буксирной приемной стропы 80.
Ходовой конец приемной стропы 80 в сложенном состоянии коренным концом прикреплена к устройству 81 для подвеса АНПА, установленному в носовой части АНПА с возможностью поворота этого устройства вокруг своей оси для надежной постановки АНПА на буксирный кабель-трос 16. В качестве такого устройства может быть использовано устройство для подвеса подводного аппарата к буксирному кабель-тросу (в нашем случае "к буксирной приемной стропе"), защищенное патентом РФ №2240251. Это устройство обеспечивает надежность крепления АНПА к буксирной приемной стропе 80, а также свободную раскрутку приемной стропы во всем диапазоне изменения угла ориентации продольной оси приемной стропы относительно АНПА. Кроме того, исключается возможность затекания морской воды в устройство и уменьшается износ ответных токоведущих частей в узле вращения. Устройство 81 содержит силовую заделку буксирной приемной стропы 80, карданный шарнир, электроразъем, представляющий собой электрическую контактную часть с вводом электрической части буксирной приемной стропы в бортовую систему управления АНПА, заполненные диэлектрической жидкостью узел герметичного ввода токоведущих жил и вращающийся токосъемник. При этом корпус силовой заделки приемной стропы 80, корпус узла герметичного ввода токоведущих жил, корпус электроразъема и выходной полый вал вращающегося токосъемника последовательно и жестко соединены между собой с возможностью расстыковки корпуса электроразъема, а корпус вращающегося токосъемника соединен с корпусом АНПА посредством карданного шарнира, электроразъем содержит две герметичные вилки, установленные в различных частях разборного корпуса, и проходную розетку, а узел герметичного ввода токоведущих жил и вращающийся токосъемник снабжены компенсаторами изменения объема диэлектрической жидкости.
В рабочем состоянии (при движении АНПА) перед выпуском буксирной приемной стропы она удерживается вдоль всего корпуса в раскрываемых ламелях 82. В кормовой части АНПА на заднем срезе насадки 75 водометного движителя приемная стропа 80 удерживается, например, поддерживающим роликом 83 и вытяжным фиксатором 84. Вытяжной фиксатор 84 стропы может представлять собой, например, тонкий полипропиленовый шнур, один конец (коренной) которого жестко закреплен в основание катушки 79, а свободный конец, который прижат корпусом обтекателя 73, продет в виде шнуровки в поперечные отверстия в профиле нижнего ребра контрпропеллера 74 насадки 75 водометного движителя. При этом этот свободный конец фиксатора 84 перед выпуском приемной стропы 80 удерживает ее от воздействия набегающего потока воды на нижнем ребре контрпропеллера 74 в насадке 75 водометного движителя АНПА.
Буксирная приемная стропа 80 представляет собой кабель-трос, например, марки ГПЭ4×0,1 длиной 20-25 м с токоведущими жилами, причем токоведущие жилы стропы 80 электрически посредством узла герметичного ввода токоведущих жил соединены с бортовой системой управления (не показано) АНПА. Графоаналитическим методом установлено, что длина приемной стропы должна составлять 0,2-0,25 расстояния между маркерами.
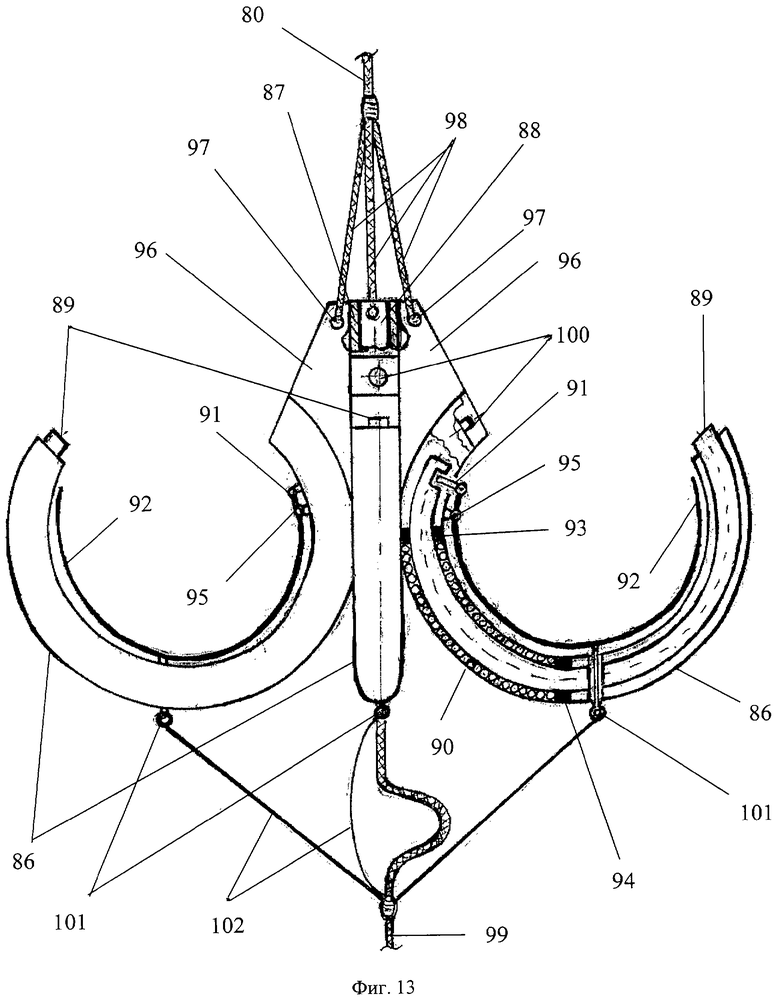
На ходовом конце буксирной приемной стропы 80 закреплен кольцевой замок 85, состоящий из 4-х кольцевых втулок 86, выполненных в форме "кошки" с центральным веретеном 87, которое вставлено в центральное отверстие (не показано) катушки 79. Веретено 87 в свою очередь через свое центральное отверстие 88 надето на стягивающий разрывной болт 77. Конструкция кольцевого замка 85 из 4-х кольцевых втулок в виде "кошки" является наиболее оптимальной для надежного захвата буксирного кабель-троса 16.
Каждая кольцевая втулка 86 замка выполнена в форме части полого тороида, внутри которого помещены кольцевой стержень 89, рабочая пружина 90, кольцевой стопор 91 и рычаг 92. На кольцевой стержень 89 надета рабочая пружина, которая одним концом упирается в упорное кольцо 93 кольцевой втулки, а другим - в упорное кольцо 94 кольцевого стержня. Упорные кольца 93 и 94 жестко закреплены на кольцевой втулке и кольцевом стержне соответственно.
В упорном кольце 93 кольцевой втулки 86 имеется отверстие, через которое свободно проходит кольцевой стержень 89. Упорное кольцо кольцевого стержня свободно проходит внутри кольцевой втулки 86 и выступает за габариты кольцевого стержня 89. Кольцевой стопор 91 прикреплен к рычагу 92, который шарнирно закреплен на стойке 95 и жестко прикреплен к кольцевой втулке 86. Внутренний диаметр кольцевой втулки 86 по размеру должен быть больше диаметра маркеров 17-17 для свободного прохода кольцевого замка 85 через маркеры.
Кольцевые втулки 86 замка между собой скреплены кронштейнами 96, приваренными к веретену 87, причем кронштейны 96 вверху имеют отверстия 97 под фалы 98, которые расположены в верхней части замка 85 и жестко заделаны в свободный конец буксирной приемной стропы 80. Таким образом, буксирная приемная стропа 80 прикреплена фалами 98 через отверстия 97 к кронштейнам 96 и веретену 87 кольцевого замка 85. В нижней части веретена 87 жестко заделана концевая стропа 99, пропущенная через пиротехнический резак (не показано) этой стропы. Пиротехнический резак установлен в нижней части веретена 87 и электрически соединен с электрозамыкателями 100 кольцевого замка 85 и бортовой системой управления (не показано) АНПА. Каждый электрозамыкатель 100 (их всего 4 по числу втулок кольцевого замка) заделан в верхнюю кольцевую часть каждой втулки 86. Все 4 электрозамыкателя также электрически соединены с токоведущими жилами буксирной приемной стропы 80 и бортовой системой управления АНПА (не показано).
В нижней части каждой кольцевой втулки 86 и кольцевого стержня 89 имеются сквозные сверления (не показано) под металлическую чеку 101. Каждая чека вставлена в сверления для фиксации кольцевого стержня 89 в кольцевой втулке 86. Все 4 чеки выполнены в форме шпонки и соединены с концевой стропой 99, например, с помощью капроновых шнуров 102 длиной 0,2-0,5 м.
На концевой стропе 99 закреплен стабилизирующий зонд 103. Концевая стропа 99 и капроновые шнуры 102 перед использованием уложены кольцами на стержне стягивающего разрывного болта 77 у нижней части кольцевых втулок 86 замка 85. По конструкции кольцевые втулки 86 с кольцевыми стержнями 89 должны быть меньше, чем контактная шайба сигнально-разрывного пиротехнического устройства 18 на буксирном кабель-тросе 16. Шайба устройства 18 служит для надежной постановки и фиксации АНПА с помощью замка 85 на буксирный кабель-трос 16.
Концевая стропа 99 выполнена из отрезка, например, полипропиленового троса диаметром 4 мм и длиной 1-3 м. Стабилизирующий зонд 103 предназначен для выдергивания посредством концевой стропы 99 чеки 101 одновременно с каждого кольцевого стержня и последующего ориентирования в набегающем потоке кольцевого замка 85 ниже корпуса АНПА и представляет собой, например, парашют с коническим куполом. Его фалами (не показано) являются каболки (не показано), например, полипропиленового троса, причем в вершине купола каболки заплетены, образуя отверстие под стягивающий разрывной болт 77. Купол зонда 103 образован, например, капроновыми лентами, скрепленными с каболками.
При этом купол зонда 103 через отверстие (не показано) в своей вершине надет на стягивающий разрывной болт 77. Вся конструкция устройства выпуска приемной стропы 80 с катушкой 79, кольцевым замком 85 и стабилизирующим зондом 103 закрывается обтекателем 73, который также через свое отверстие (не показано) в вершине надет на стягивающий разрывной болт 77.
Устройство для выпуска буксирного кабель-троса и приема АНПА в ПЛ в подводном положении работает следующим образом.
В исходном положении кормовая 1 и носовая 5-5 части трубы и передняя крышка 10 герметично состыкованы. Герметичность в состыковочном состоянии обеспечивается фланцами 6 носовой части трубы и уплотнительными кольцами 2 и 11 (под эти фланцы) соответственно кормовой 1 части трубы и передней крышки 10, в которые носовая часть трубы входит своими задним и передним концами.
Для выпуска буксирного кабель-троса 16 его ходовой конец через прорезь (не показано) в стенке трубы вручную сматывается с барабана электролебедки 15, пропускается через центральное отверстие 28 в воронке 27 причального конуса 24 и крепится на рым-болт (не показано) стабилизирующего поплавка-отводителя 19. Конструкция барабана лебедки должна обеспечивать свободное сматывание и наматывание буксирного кабель-троса 16 с маркерами 17-17 в случае выпуска этого троса и приема его с буксирной приемной стропой 80, кольцевым замком 85 и контактной шайбой сигнально-разрывного пиротехнического устройства 18. Прорезь в стенке трубы 5-5 и центральное отверстие 28 в воронке 27 причального конуса 24 должны быть достаточны для свободного прохода буксирного кабель-троса 16 с маркерами 17-17, буксирной приемной стропы 80 с кольцевым замком 85 и контактной шайбой сигнально-разрывного пиротехнического устройства 18. Стабилизирующий поплавок-отводитель 19, вставленный в причальный конус 24 (или АНПА в случае его выпуска), при открытой задней крышке 3 кормовой части 1 трубы размещают на роликовых направляющих дорожках 72, расположенных внутри носовой части 5 трубы. Причальный конус 24 с поплавком-отводителем 19 фиксируется стенками трубы 5-5 на поплавке-отводителе, и поплавок-отводитель (или АНПА) ставится на стопор 8. После этого производят подключение гермо-разъемов электро- и пневмосхем (не показано) устройства выпуска кабель-троса 16 к прибору ввода данных 9.
С помощью привода 4 закрывают заднюю крышку 3 и с помощью штатной системы затопления и осушения, задействуя при необходимости (например, при дифференте на корму) включенные в эту систему телескопические патрубки 14, заполняют внутреннюю полость трубы забортной водой и выравнивают давление внутри трубы с забортным давлением. Затем приводят в действие привод стыковки и расстыковки кормовой и носовой частей трубы и передней крышки: при вращении винта 58 гайка-ползун 57, жестко закрепленная на корпусе передней крышки 10, начинает двигаться по винту, открывая переднюю крышку в направлении кормовой части трубы. Крышка 10 перемещается параллельно оси винта 58, своим зацепом 13 цепляется за фланец 6 носовой части трубы и перемещает ее вдоль оси каретки 42, производя расстыковку носовой 5 части трубы с кормовой 1, при этом каретка остается неподвижной. Вращая приводной барабан 60 механизма перемещения каретки при помощи троса 61, переброшенного через систему блоков 62, обеспечивают перемещение каретки 42 на ее роликах (верхних 43 и нижних 44) по направляющим дорожкам 66 в оконечность кормового горизонтального стабилизатора 26 ПЛ, где расположен канал набегающего потока 59. При этом под натяжением кабель-троса 64 второй приводной барабан 63 тросового привода механизма перемещения каретки приводится во вращение, сматывая кабель-трос. В процессе движения каретки направляющий шток 7, двигаясь по своей направляющей дорожке 67, обеспечивает продольное перемещение носовой части трубы в канал набегающего потока 59 по заданной направляющей дорожкой 67 траектории. Таким образом, в процессе перемещения в канал набегающего потока 59 носовая часть 5 трубы совершает как поступательное движение вместе с кареткой 42, так и продольные перемещения внутри каретки. При подходе каретки к каналу 59 набегающего потока приводят в действие механический привод открывания и закрывания кормовых щитов: при вращении винтов 48 гайки-ползуны 47, двигаясь по винтам, давят на рычаги 49, в результате чего открываются кормовые щиты 45. После открывания щитов носовая часть 5-5 трубы перемещается в канал 59 набегающего потока, так как шток 7 передает ей продольное перемещение в каретке. По готовности причального конуса 24 с поплавком-отводителем 19 (или АНПА) к выпуску приводится в действие привод открывания и закрывания носового щита 51 диффузора 50: при вращении винта 53 приводится в движение гайка-ползун 52, которая своей втулкой воздействует на палец 54, а через него и на носовой щит 51, перемещая его вместе с пальцем в направлении движения гайки-ползуна 52. Далее носовой щит 51 движется благодаря взаимодействию по меньшей мере одного направляющего ролика 55 со своей направляющей дорожкой 56 и заходит за обшивку кормового горизонтального стабилизатора 26, открывая вход диффузора 50, благодаря чему открывается доступ набегающеего потока в носовую часть трубы и в канал вокруг трубы.
По команде «пуск» стабилизирующий поплавок-отводитель 19 (или АНПА) снимают со стопора 8 и набегающий гидродинамический поток, воздействуя на воронку 27 причального конуса 24 (а она в свою очередь давит на поплавок-отводитель 19, который соединен с кабель-тросом 16), перемещает причальный конус 24 к заднему срезу 32 трубы 5-5, а поплавок-отводитель 19 выталкивает из трубы. Свободно выпущенный из трубы 5-5 в набегающий поток за корму ПЛ поплавок-отводитель 19 под действием гидродинамической силы набегающего потока и своей силы положительной плавучести, всплывая, свободно вращает барабан (не показано) лебедки 15, выпускает из носовой части 5-5 трубы ходовой конец буксирного кабель-троса 16 с гидроакустическими маркерами 17-17. При выходе причального конуса 24 из трубы его стальные спицы 34 выходят за задний срез 32 трубы 5, а воронка 27 причального конуса при прохождении заднего среза 32 трубы своим выступом давит на электрозамыкатель 40 в электросхеме электропневмоклапана с редуктором 41 баллона 38 с азотом. Азот из баллона 38 по трубкам 37 (стальной) и 39 (резиновой) через штуцер (не показано) поступает в резиновую камеру 36, которая, надуваясь, обеспечивает надежное раскрытие спиц 34 причального конуса 24 после его стопорения пружинными фиксаторами 31 в проточке заднего среза 32 трубы 5-5. После раскрытия причального конуса 24 ранее выпущенный на 201-220 м буксирный кабель-трос 16 готов к приему АНПА.
С гидроакустической станции подводной лодки по гидроакустическому каналу связи дается команда в систему управления АНПА (расположенную на АНПА) для перехода на выполнение программы постановки АНПА на буксирный кабель-трос 16 и последующего приема АНПА на борт ПЛ. Выполняя программу, АНПА маневрирует в вертикальной и горизонтальной плоскостях для занятия заданной относительно маркеров 17-17 позиции.
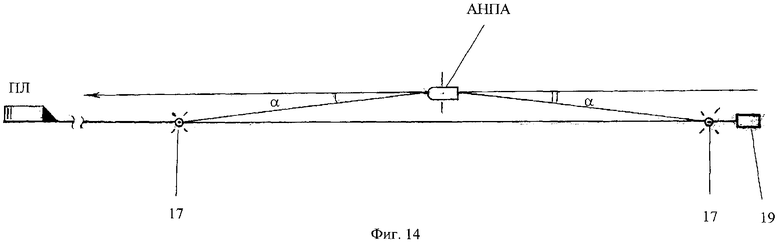
Заданная относительно гидроакустических маркеров позиция, в которую перемещают АНПА, находится в такой точке, из которой курсовые углы α на гидроакустические маркеры равны по величине (носовой курсовой угол на первый, ближний к ПЛ маркер, равен кормовому углу на второй маркер).
Графоаналитическим методом установлено, что величина α равна 25-28°. Такой угол обеспечивает позицию АНПА, при которой траверзное расстояние от АНПА до буксирного кабель-троса составляет примерно четверть расстояния между маркерами, что в свою очередь обеспечивает АНПА свободу маневра и безопасность от столкновения АНПА с кабель-тросом 16 и поплавком-отводителем 19.
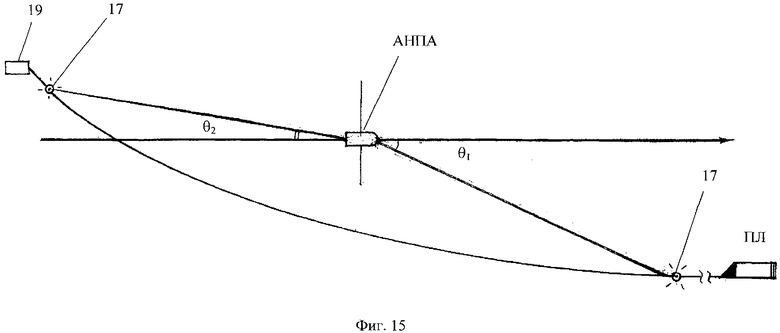
Занимая позицию между маркерами 17-17 по глубине, АНПА изменяет глубину таким образом, чтобы угол места θ1 (вниз от горизонтальной плоскости движения АНПА) первого (нижнего) маркера превышал примерно в 3 раза угол места θ2 (вверх от горизонтальной плоскости движения АНПА) второго (верхнего) маркера относительно АНПА.
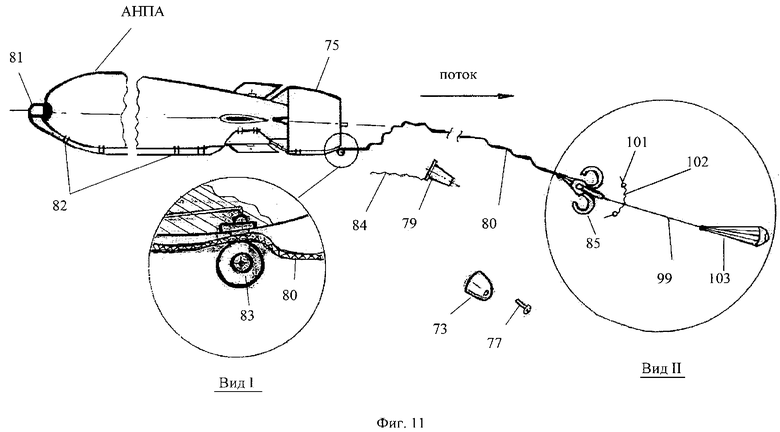
Заняв позицию по дистанции и глубине, АНПА устанавливает скорость, равную ПЛ. Для приема АНПА на борт ПЛ по сигналу с ПЛ по каналу гидроакустической связи ПЛ с АНПА (гидроакустическая связь обеспечивается гидроакустическими станциями ПЛ и АНПА) на АНПА в кормовой его части отстреливается пиротехническим приспособлением (не показано) стягивающий разрывной болт 77 в устройстве выпуска приемной стропы 80. При этом обтекатель 73 свободно тонет. Катушка 7, вращаясь от набегающего потока, выбрасываемого из насадки 75 работающего водометного движителя, разматывает ходовой конец буксирной приемной стропы 80 и одновременно вытаскивает вытяжной фиксатор 84 стропы 80, после чего катушка 79 полностью освобождается от стропы и тоже тонет. При этом выпускаемая автономным необитаемым подводным аппаратом буксирная приемная стропа 80 с кольцевым замком 85 стабилизируется в набегающем потоке стабизирующим зондом 103, причем все рабочие элементы кольцевого замка 85 приводятся в рабочее состояние после выдергивания каждой чеки 101 капроновым шнуром 102. Это достигается благодаря натяжению и выборке короткой части капроновых шнуров 102 концевой стропой 99 в момент раскрытия в потоке стабилизирующего зонда 103.
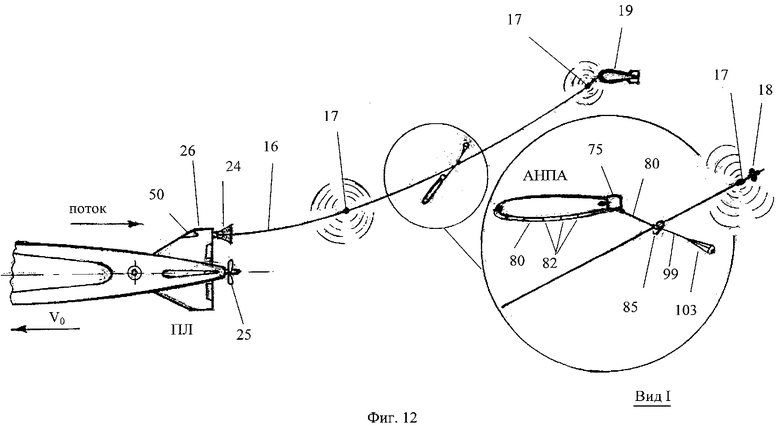
После выпуска буксирной приемной стропы 80 согласно программе постановки АНПА на буксирный кабель-трос НПА изменяет курс на 90° в сторону буксирного кабель-троса 16 (наперерез буксирному кабель-тросу) и проходит между маркерами над ним. При этом вследствие движения приемной стропы 80 (буксируемой АНПА) наперерез движению буксирного кабель-троса, кабель-трос 16 касается приемной стропы 80 примерно на расстоянии 0, 75 своей длины, после чего происходит их взаимное пересучивание (буксирный кабель-трос скользит по приемной стропе, а приемная стропа скользит по кабель-тросу), в результате чего буксирный кабель-трос попадает в кольцевой замок 85 (в одну из четырех кольцевых втулок 86) и давит на рычаг 92, а он в свою очередь воздействует на кольцевой стопор 91. Стопор выходит из зацепления с кольцевым стержнем 89. Кольцевой стержень 89, освобождаясь от стопора 91 под действием пружины 90, замыкает кольцо кольцевой втулки 86 и фиксирует замок 85 на буксирном кабель-тросе 16. При этом кольцевая втулка 86 давит на электрозамыкатель 100, который замыкает свои контакты, сигнализируя в бортовую систему управления АНПА (находящуюся на АНПА) о захвате буксирного кабель-троса 16 кольцевым замком 85, а также включает электроцепь пиротехнического резака (не показано), который перерезает концевую стропу 99, освобождая кольцевой замок 85 от стабилизирующего зонда 103, который тонет. После этого бортовая система управления АНПА по гидроакустическому каналу связи с ПЛ сигнализирует на ПЛ о захвате кольцевым замком буксирного кабель-троса 16 и постановке АНПА на буксирный кабель-трос. Бортовая система управления АНПА замедляет скорость движения АНПА до стопа. Затем по сигналу с бортовой системы управления АНПА включается электропитание на электрозапал (не показано) разрывного пиротехнического устройства для отстрела ролика 83, поддерживающего коренной конец буксирной ходовой приемной стропы 80. Ролик 83 отстреливается и тонет. АНПА за счет удержания буксирной приемной стропой 80 с замком 85 на кабель-тросе 16, разворачиваясь носом по ходу ПЛ, натягивает стропу 80, в результате этого усилия раскрываются ламели 82, освобождая часть приемной стропы, уложенной вдоль корпуса АНПА. АНПА, окончательно ставший на буксирный кабель-трос 16, разворачивается носовой частью по потоку и по ходу ПЛ, начинает буксироваться подводной лодкой. Кольцевой замок 85 продолжает скользить по буксирному кабель-тросу 16, при этом кольцевая втулка замка, закрытая кольцевым стержнем, проходит через концевой маркер 17 и фиксирует АНПА на контактной шайбе сигнально-разрывного пиротехнического устройства 18, установленного за концевым маркером 17 перед поплавком-отводителем 19. Застопорившийся на кабель-тросе 16 кольцевой замок 85 кольцевой втулкой 86 давит на контактную шайбу сигнально-разрывного пиротехнического устройства 18, а она в свою очередь давит на электрозамыкатель (не показано) этого устройства (электрозамыкатель заделан в окончание кабель-троса 16), в результате чего электрозамыкатель замыкает электроцепь сигнализации, сигнализируя на ПЛ об окончательной постановке АНПА на буксирный кабель-трос 16.
С ПЛ через прибор ввода данных 9 включают электроцепь (не показано) запала сигнально-разрывного пиротехнического устройства 18, заделанного в кабель-трос 16. Разрывной болт этого устройства разрывается, освобождая поплавок-отводитель 19 от буксирного кабель-троса 16, причем контактная шайба сигнально-разрывного пиротехнического устройства 18 остается на буксирном кабель-тросе 16 для надежного удержания кольцевого замка 85 на кабель-тросе 16. Поплавок-отводитель 19 всплывает и посредством гидростатического клапана самозатапливается. В ходе последующих действий с ПЛ включается электродвигатель (не показано) лебедки 15 и через достаточно большое центральное отверстие 28 в металлической воронке 27 причального конуса 24 осуществляется выборка лебедкой 15 на барабан (не показано) кабель-троса 16 с маркерами 17-17, приемной стропы 80 с кольцевым замком 85, застопоренным на контактной шайбе (не показано), подтягивание приемной стропы с АНПА (как упоминалось выше, буксирная приемная стропа коренным концом прикреплена к устройству для подвеса 81 АНПА) и его ввод в причальный конус 24.
Перед входом АНПА в трубу 5-5 он своей носовой частью надавливает на вогнутость воронки 27 причального конуса 24, снимает воронку с пружинных фиксаторов 31 и замыкает электрозамыкателем 29 автономную электроцепь (не показано) пирозапала пиротехнического резака 30, который перерезает капроновый шнур-фиксатор (не показано), освобождая резиновую камеру 36. Камера, имея положительную плавучесть, всплывает, при этом выдергивает шнур-фиксатор камеры, после чего свободно всплывающая камера 36 при срабатывании гидростатического клапана (не показано) затапливается. Стальные спицы 34 причального конуса 24, освобождаясь от резиновой камеры 36, складываются в шарнирах 33, и причальный конус, сложившийся вокруг носовой части АНПА, вместе с АНПА затягивается электролебедкой 15 в глубь носовой части трубы 5-5. При последующем движении в трубе причальный конус 24 краем воронки 27 надавливает на электрозамыкатель 22 электроцепи электропневмоклапана с редуктором 23 в схеме подачи жидкого полимера. Электропневмоклапан 22 с редуктором 23 включает подачу жидкого полимера из баллона 21, причем полимер для лучшей смазки трущихся деталей набегающим потоком воды перемещается по всей носовой части трубы 5-5 к ее заднему срезу 32.
Жидкий полимер значительно уменьшает силы трения между трубой 5-5 и причальным конусом 24 с АНПА. Окончательная выборка буксирного кабель-троса 16 и причального конуса 24 и установка АНПА на стопор 8 завершается с отключением выключателя 20 в электроцепи (не показано) электропитания лебедки 15. Для этого выключатель 20 установлен в трубе 5-5 на завершающем пути движения АНПА. При окончательном входе АНПА в трубу он своей носовой частью надавливает на выключатель 20 и отключает электропитание лебедки. Для надежной фиксации АНПА в трубе 5-5 его ставят на стопор 8, механическим приводом закрывают носовой щит 51 диффузора 50 следующим образом: приводят во вращение (обратное первоначальному) винт 53, который приводит в движение гайку-ползун 52. Последняя в свою очередь, воздействуя своей втулкой на палец 54, а через него и на носовой щит 51, перемещает его в направлении к диффузору 50 и закрывает диффузор. На конечном участке пути ролик 55, двигаясь по дорожке 56, обеспечивает выход носового щита 51 из-за обшивки кормового горизонтального стабилизатора 26. Затем приводят во вращение второй приводной барабан 63, на который наматывается кабель-трос 64. Под натяжением троса каретка 42 с носовой частью трубы возвращается в соосное с кормовой частью трубы и передней крышкой 10 положение. Затем приводят во вращение (обратное первоначальному) винты 48, по которым движутся гайки-ползуны 47 и, воздействуя на рычаги 49, закрывают кормовые щиты 45. Далее приводят во вращение (обратное первоначальному) винт 58, при этом гайка-ползун 57, жестко закрепленная на крышке 10, движется вдоль винта, перемещая за собой крышку 10 с уплотнительным кольцом 11 к заднему концу носовой 5-5 части трубы. При дальнейшем движении гайки-ползуна 57 по винту 58 крышка 10 двигает носовую 5-5 часть трубы в каретке 42, обеспечивая стыковку с кормовой частью 1. После стыковки осушают через патрубки 14 внутреннюю полость трубы 5, открывают заднюю крышку 3 носовой части 5-5 трубы, вручную отсоединяют от АНПА буксирный кабель-трос 16 с приемной стропой 80, сматывают приемную стропу 80 и производят выгрузку на штатные места в кормовой отсек ПЛ причального конуса 24 и принятого на ПЛ АНПА.
Заявляемые способ и устройство обеспечивают надежный прием АНПА в подводную лодку в подводном положении на ее малом (инверсионном) ходу (при котором обеспечено надежное управление ПЛ) путем постановки АНПА на буксирный кабель-трос (без непосредственного контакта АНПА с корпусом ПЛ) и затягивания кабель-троса с АНПА в трубу, расположенную в кормовом отсеке ПЛ.
Постановка АНПА на буксирный кабель-трос осуществляется благодаря взаимному пересучиванию буксирного кабель-троса, выпускаемого с кормовой оконечности ПЛ, и приемной стропы АНПА, в результате которого кабель-трос захватывается кольцевым замком и фиксируется на контактной шайбе. Взаимное пересучивание кабель-троса и приемной стропы достигается благодаря буксировке кабель-троса подводной лодкой при заданной его ориентации (буксирный кабель-трос под воздействием поплавка-отводителя и набегающего потока ориентирован в пространстве по дуге, направленной к поверхности воды) и перемещению АНПА наперерез движению буксирного кабель-троса на участке между маркерами.
Изобретение позволяет упростить операцию приема АНПА в ПЛ, так как постановка АНПА на буксирный кабель-трос исключает сложную задачу точного подхода АНПА к ПЛ и захват АНПА с помощью манипулятора [Необитаемые подводные аппараты военного назначения / сост.: М.Д.Агеев, Л.А.Наумов и др.; под ред. Академика РАН М.Д.Агеева. - Владивосток.: Дальнаука, 2005, с.28-31] или стыковки АНПА с приемным устройством ПАВ (как в прототипе), что снижает риск взаимного повреждения АНПА, приемного устройства или ПЛ.
В процессе приемки АНПА ПЛ (при необходимости) может осуществить маневрирование, то есть изменить скорость хода и глубину погружения, при этом АНПА, ориентируясь по маркерам, следует за ПЛ. Этот вариант обеспечивает большую возможность маневра ПЛ. Устройство может быть использовано для многократного выпуска и приема АНПА.
Кроме того, изобретение позволяет отказаться от технически сложной задачи стабилизации глубины погружения ПЛ без хода ПЛ (так как ПЛ принимает АНПА в кормовой отсек ПЛ через горизонтальный стабилизатор) и принимать АНПА в ПЛ любых проектов, если их кормовые части оборудовать предлагаемым устройством.
Для реализации предложенных способа и устройства нет необходимости использовать специальное приемное устройство в составе с ПАВ (как в прототипе), что снижает стоимость всей операции приема АНПА в ПЛ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРАЛЕНИЯ МИН ПОДВОДНОЙ ЛОДКОЙ | 1991 |
|
RU2076057C1 |
| СПОСОБ ВЫПУСКА ОБЪЕКТА ИЗ ПОДВОДНОЙ ЛОДКИ В ПОДВОДНОМ ПОЛОЖЕНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183173C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ПЕРЕДАЧИ ИНФОРМАЦИИ О СОСТОЯНИИ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2769806C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| Пусковая установка с гравитационно-пружинным выстреливанием подводных снарядов с возможностью размещения на плавсредствах и/или летательных аппаратах | 2024 |
|
RU2834491C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ ОБ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКЕ ИЗ-ПОДО ЛЬДА | 2022 |
|
RU2783690C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2790529C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| СИСТЕМА ПРИВЕДЕНИЯ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА К ДОННОМУ ПРИЧАЛЬНОМУ УСТРОЙСТВУ | 2020 |
|
RU2750550C1 |
Изобретение относится к способам и устройствам для приема в подводные лодки (ПЛ) автономных необитаемых подводных аппаратов (АНПА). Способ приема АНПА включает в себя выпуск из ПЛ буксирного кабель-троса с гидроакустическими маркерами и поплавком-отводителем с последующей подачей переменного напряжения на гидроакустические маркеры. Затем АНПА перемещают по программе в заданную относительно маркеров позицию и выпускают из него приемную стропу с устройством захвата и фиксации буксирного кабель-троса. После этого разворачивают АНПА относительно буксирного кабель-троса на траверзный курсовой угол и перемещают его наперерез движению буксирного кабель-троса через участок между гидроакустическими маркерами. В результате пересучивания буксирного кабель-троса и приемной стропы осуществляют захват буксирного кабель-троса и фиксацию на нем АНПА, который затем затягивают в трубу на ПЛ с помощью лебедки. Устройство для реализации этого способа содержит средство для стыковки, расположенное на АНПА, и установку, включающую в себя трубу с подвижной и неподвижной частями, расположенную в кормовом горизонтальном стабилизаторе ПЛ. При этом в подвижной части трубы расположен причальный конус, через который проходит ходовой конец буксирного кабель-троса, намотанного на лебедку и электрически соединенного с гидроакустической станцией ПЛ. Такое выполнение способа и реализующего его устройства позволяет повысить надежность приема АНПА на ходу ПЛ. 2 н. и 11 з.п. ф-лы, 15 ил.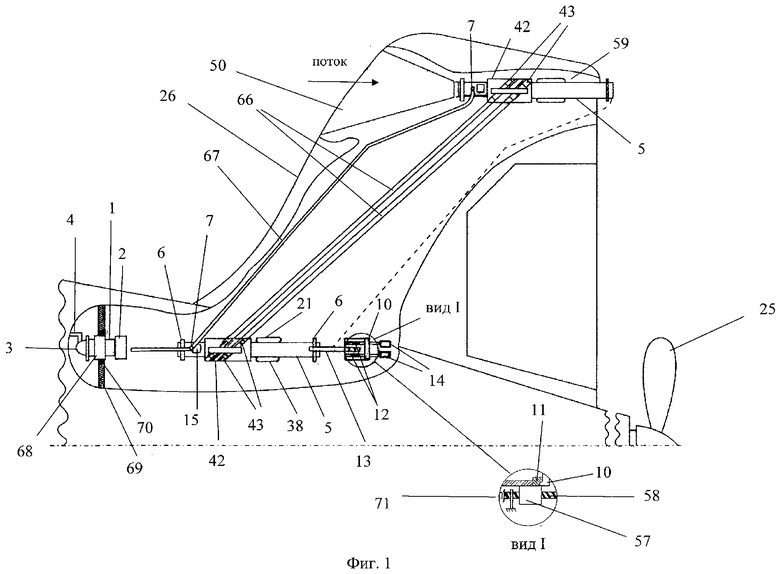
| СПОСОБ ПРОМЫСЛОВОЙ КОМПЛЕКСНОЙ ПОДВОДНОЙ РАЗРАБОТКИ МОРСКИХ МЕСТОРОЖДЕНИЙ | 1991 |
|
RU2014243C1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ, ПОСТАНОВКИ И ПРИЕМА БУЯ С ПЛАВУЧИМ ПРОВОДОМ НА ПОДВОДНОМ ТЕХНИЧЕСКОМ СРЕДСТВЕ | 2001 |
|
RU2186707C1 |
| ПОДВОДНЫЙ ТАНКЕР | 1993 |
|
RU2062731C1 |
| US 5447115 А, 05.09.1995 | |||
| СПОСОБ ПОЛУЧЕНИЯ N', N'-БИС{[АЛКИЛ(ФЕНИЛ)СУЛЬФАНИЛ]МЕТИЛ} АРИЛГИДРАЗИДОВ | 2012 |
|
RU2518491C2 |

