Изобретение относится к способам гидроакустического противодействия, в частности к имитации подводной лодки при проведении учений ВМФ и отработки средств противолодочной обороны, а также предназначено для обучения корабельных акустиков, персонала гидроакустических станций.
Проведение морских учений с участием подводных лодок (ПЛ) - очень дорогостоящее и рискованное мероприятие. Это и сложное маневрирование вблизи надводных кораблей и ошибки экипажа и отказы техники. Рискуют как сами ПЛ, так и другие участники учений.
Такие проблемы проведения учений привели к появлению в составе ВМС США и ВМФ СССР ПЛ-мишеней специальной постройки. Однако их использование не решало основных проблем - они также имели экипаж, подвергающийся опасности, а их эксплуатация была не менее дорогостоящей. Кроме того, в силу различных обстоятельств эти ПЛ не могли адекватно воспроизводить ПЛ противника. Так, ВМС США, не имеющим в своем составе боевых дизель-электрических ПЛ (ДЭПЛ), приходится привлекать к учениям ДЭПЛ своих союзников, а то и вовсе арендовать их, как это было с ПЛ "Gotland" ВМС Швеции.
Появление средств гидроакустического противодействия (ГПД) - самоходных и дрейфующих имитаторов ПЛ - позволило изменить подход к имитации ПЛ в ходе учений. К началу 90-х годов на вооружении многих флотов появились самоходные имитаторы ПЛ, специально предназначенные для проведения учений - как "тяжелые" в габаритах торпеды, так и одноразовые весом в несколько килограмм. Такие имитаторы способны воспроизводить первичное и вторичное акустические поля ПЛ, а также магнитной поле. С помощью таких имитаторов можно воспроизводить как поиск ПЛ противника, так и стрельбу по ней практическими торпедами. Некоторые из имитаторов могут оснащаться средствами ГПД, что позволяет дополнительно повысить реалистичность учений.
По мере снижения шумности ПЛ их поиск и классификация становятся все более сложными и требуют поэтапного привлечения различных средств, от стационарных и мобильных подводных аппаратов до авиационных, пользующихся разными физическими полями, для обнаружения ПЛ противника. Поэтому при создании имитаторов важным параметров является большая реалистичность воспроизводимых физических полей.
Для относительно небольшой корабельной гидроакустической станции первичные и вторичные сигналы ПЛ от малогабаритных (по сравнению с габаритами имитируемой ПЛ) имитаторов могут быть достаточными - их временные и частотные характеристики воспроизводят реальные шумы имитируемой ПЛ, но при использовании буксируемой антенны и алгоритмов сверхразрешения окажется, что все сигналы излучаются одним точечным источником.
При использовании "тяжелых" имитаторов в калибре торпеды существенно повышается автономность, но такой имитатор не может физически имитировать протяженность и габариты имитируемой ПЛ длиной 100-120 метров даже при использовании буксируемой антенны (известна модификация Mk48 с буксируемой антенной длиной 40 м, причем часть антенны является магнитной антенной и не содержит гидрофонов), но наличие антенны существенно снижает скорость движения имитатора и автономность, а фиксированное расположение гидрофонов и ограниченная длина антенны позволяет классифицировать такой имитатор как имитатор, а не как ПЛ. С точки зрения алгоритмов сверхразрешения это тоже будет группа точечных источников с фиксированным положением излучателей, а не реальный корпус ПЛ.
Известен патент RU 2022872 "Самоходный имитатор подводной лодки", в котором достоверность имитации первичного поля увеличена за счет компенсации собственных шумов винтов самоходного имитатора. Предложенное решение действительно уменьшает риск обнаружения нехарактерных для ПЛ шумов малогабаритного движителя у имитатора, но при этом источник сигнала остается точечным, что позволяет его однозначно классифицировать.
Наиболее близкий способ - патент на полезную модель RU 115754 U1 "Средство противодействия гидроакустическим комплексам подводных объектов", в котором на корпусе подводной лодки от носа до кормы расположено несколько отдельных буксируемых модулей с излучателями гидроакустических сигналов. Целью такого решения является имитация сигналов и шумов подводной лодки, расположенной на некотором расстоянии от имитатора. Достоинством такого решения является возможность использовать энергетические системы подводной лодки для питания имитатора и пространственная структура имитируемых шумов, а недостатком - необходимость наличия реальной подводной лодки для буксировки имитатора.
Техническим результатом изобретения является повышение достоверности имитации заданного типа ПЛ за счет формирования ее пространственного образа группой самоходных подводных аппаратов, движущихся согласованным строем по программе маневрирования или управляющей команды.
Технический результат достигается тем, что каждый из группы самоходных подводных аппаратов по программе маневрирования располагается в узловых точках соответствующих зонам наиболее интенсивных источников шума ПЛ и осуществляет движение согласованным строем, формирует собственное первичное и вторичное поля соответствующее этой зоне имитируемой ПЛ без ее реального присутствия.
Первичное поле, которое формируется аппаратами, расположенными в зонах наиболее интенсивных источников шума ПЛ - имитируется как искусственный шум движителей и механизмов, так и шумы обтекания корпуса, рулей и винтов. Наиболее сильные источники первичного поля обычно - это винты, расположенная внутри корпуса энергетическая установка, вспомогательные механизмы и рули глубины.
Вторичное поле, формируемое аппаратами, воспроизводит «бликовую» структуру отраженного от ПЛ эхосигнала гидролокатора аппаратами, расположенными в зонах выступающих частей корпуса ПЛ, рулей, рубки, винтов и наиболее вероятного наличия «блика» при приходе сигнала гидролокатора с определенных направлений.
Полученное таким образом суммарное поле не содержит классификационных признаков, позволяющих отличить имитатор от ПЛ - шумы и отраженные сигналы формируются в тех же местах, где они формируются у реальной ПЛ, при этом сами подводные аппараты - небольшие по габаритам.
Реализация способа представлена на:
Фиг. 1 - приведена пространственная структура акустического сигнала ПЛ.
Фиг. 2 - пример расположения самоходных подводных аппаратов, имитирующих пространственную структуру акустического сигнала ПЛ.
На фиг. 1 кружками обозначены положения ярких "бликов" отраженного сигнала у реальной подводной лодки (вторичного поля ПЛ), там же могут быть отображены источники первичного акустического поле ПЛ. Основными яркими «бликами» с любого курсового угла у ПЛ являются носовая оконечность, выступающие из корпуса рули, рубка с антеннами и шноркелями, винты.
Имитация, как объекта, подводной лодки осуществляется группой автономных подводных аппаратов, каждый из которых содержит корпус с движителем, блок управления и средства гидроакустического противодействия, при этом каждый аппарат оснащен системой гидроакустической связи и позиционирования, группа автономных подводных аппаратов движется заданным строем, обмениваясь между собой информацией о текущем состоянии и местоположением относительно друг друга. Каждый аппарат в группе формирует и излучает свою часть акустического поля подводной лодки, что позволяет формировать распределенное в пространстве и достоверное по структуре акустическое поле имитируемой подводной лодки. В ходе учений может быть поставлена задача по имитации различного типа ПЛ и тогда по заранее заданной программе или по команде оператора, переданной гидроакустическим модемом, осуществляется, соответствующее заданному типу ПЛ, пространственное перестроение группы автономных аппаратов.
Способ имитации подводной лодки осуществляется следующим образом: со специального носителя запускают группу автономных подводных аппаратов, каждый из которых включает гидроакустические системы связи и позиционирования и определяет положение соседних аппаратов, затем аппараты распределяют между собой взаимное положение для имитации заданного типа ПЛ, выстраиваются заданным строем и движутся по определенной траектории по командам, передаваемым на гидроакустический модем, или по установленной программе, при этом каждый подводный аппарат излучает часть первичного акустического поля ПЛ, характерную для той части корпуса, в районе которой находится этот аппарат. При обнаружении зондирующего импульса каждый аппарат формирует свою часть эхо-сигнала, привязанного к положению аппарата в группе.
Таким образом, первичное и вторичное поле сформированное группой автономных аппаратов образует распределенную в пространстве сложную по временным и спектральным параметрам структуру, повторяющую поле имитируемой подводной лодки. По команде оператора, переданной через гидроакустический модем, или по заданной программе при изменении типа имитируемой ПЛ, автономные подводные аппараты перемещают для построения соответствующего этому типу ПЛ пространственного строя и осуществляют в соответствии с этим типом ПЛ формирование ее акустического поля с излучением первичных и вторичных сигналов.
Предлагаемый способ, обеспечивающий формирование акустического поля с использованием группы автономных подводных аппаратов, оснащенных системой связи и позиционирования, повышает достоверность имитации ПЛ, расширяет функциональные возможности проведения учений обеспечивая вариабельность его использования применительно к различным типам ПЛ, а также повышает качество обучения корабельных акустиков и персонала гидроакустичеких станций.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2770388C1 |
| ПОДВОДНЫЙ АППАРАТ КОМПЛЕКСНЫЙ | 2016 |
|
RU2640598C1 |
| Способ имитации присутствия подвижного подводного аппарата | 2016 |
|
RU2616321C1 |
| БУКСИРУЕМЫЙ МОДУЛЬ ПОДВОДНОЙ АНТЕННОЙ РЕШЕТКИ | 1991 |
|
RU2014631C1 |
| ПОДВОДНЫЙ АППАРАТ-ОХОТНИК | 2017 |
|
RU2654435C1 |
| ПОДВОДНЫЙ ПОМЕХОПОСТАНОВЩИК | 2016 |
|
RU2662573C2 |
| ИМИТАТОР ПЕРВИЧНОГО И ВТОРИЧНОГО ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ДВИЖУЩЕЙСЯ ПОДВОДНОЙ ЦЕЛИ | 1970 |
|
SU1840763A1 |
| СПОСОБ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1986 |
|
SU1840507A1 |
| Имитатор надводной и подводной цели | 2021 |
|
RU2761688C1 |
| САМОХОДНЫЙ ИМИТАТОР ПОДВОДНОЙ ЛОДКИ | 1991 |
|
RU2020510C1 |

Изобретение относится к способам гидроакустического противодействия, в частности к имитации подводной лодки с целью обучения корабельных акустиков, персонала гидроакустических станций, проведения учений ВМФ и отработки новых сил и средств противолодочной обороны. Имитация подводных лодок (ПЛ) при проведении учений заключается в формировании первичного и вторичного акустических полей имитируемой ПЛ группой самоходных подводных аппаратов, каждый из которых формирует свою часть акустического поля и движется в заданном пространственном строю, для формирования и поддержания которого каждый аппарат оснащен системой связи и взаимного позиционирования. По заданной программе или по команде оператора, переданной по гидроакустическому модему, подводные аппараты пространственно перестраиваются в соответствии с типом имитируемой ПЛ, формируют сложное акустическое поле ПЛ, имеющее ту же временную и пространственную структуру, что и акустическое поле реальной ПЛ. Достигается повышение достоверности имитации подводной лодки без ее реального участия, расширение функциональных возможностей проведения учений, обеспечивая вариабельность его использования применительно к различным типам ПЛ, а также повышение качества обучения корабельных акустиков и персонала гидроакустичеких станций. 1 з.п. ф-лы, 2 ил.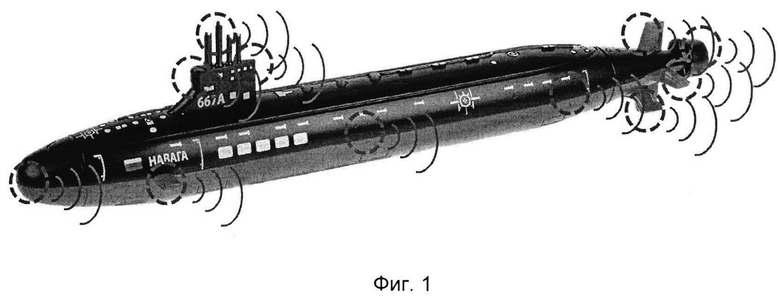
1. Способ имитации подводных лодок (ПЛ) при проведении учений, включающий запуск группы автономных подводных аппаратов, оснащенных системой взаимной связи и позиционирования, формирование заданного пространственного взаимного расположения аппаратов в узловых точках формирования поля акустических сигналов ПЛ, движение строем по заданной траектории, имитирующей движение ПЛ, излучение каждым аппаратом части первичного акустического поля, а именно собственных шумов ПЛ, соответствующего пространственному положению аппарата, формирование распределенного в пространстве и достоверного по структуре акустического поля имитируемой подводной лодки, излучение каждым аппаратом части вторичного акустического поля ПЛ, соответствующего пространственному положению аппарата при обнаружении зондирующего импульса гидролокатора.
2. Способ по п. 1, включающий имитацию акустического поля различных типов ПЛ, по которому осуществляют пространственное перестроение и изменение параметров излучаемых шумов автономными подводными аппаратами в соответствии с типом ПЛ по заданной программе или по команде оператора.
| Приспособленке для расшлифовки и доводки цилиндрических поверхностей деталей, например, дизельной топливной аппаратуры | 1955 |
|
SU115754A1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2119172C1 |
| US 5119341 A1, 02.06.1992. | |||

