Изобретение относится к автоматическим самонатягивающимся устройствам привода поручня эскалатора, обеспечивающим сбалансированное натяжение роликов привода поручня, расположенных по разные стороны поручня.
Известен экскалатор с приводом поручня, который автоматически увеличивает мощность тяги при возрастании сопротивления движения поручня. Привод поручня содержит пару совместно работающих приводных роликов, смонтированных эксцентрично на паре подшипников, выполненных с возможностью поворота в противоположные стороны. Приводные ролики образуют захват, через который проходит поручень. С ростом сопротивления движению поручня, например при полной нагрузке эскалатора или пешеходной дорожки, возрастают силы трения между поpучнем, что вызывает поворот эксцентрично установленных подшипников, которые смещают ролики в направлении друг к другу, тем самым увеличивая давление захвата на поручень.
В большинстве случае поручень экскалатора или движущейся пешеходной дорожки имеет составную конструкцию. Учитывая, что поручень скользит по направляющей, внутренняя поверхность поручня выполнена из подходящего износостойкого материала с низким коэффициентом трения. Обычно поверхность поручня, скользящая по направляющей, изготавливается из тканых текстильных материалов. Наружная поверхность поручня выполняется из износостойкого материала, обычно резины, с высоким коэффициентом трения, чтобы рука пассажира случайно не соскользнула. Различие в коэффициентах трения для наружной поверхности поручня и внутренней поверхности поручня, контактирующей с направляющей, может вызвать различное натяжение вышеописанных приводных роликов поручня. Это различие в натяжении может усилиться при более высоких уровнях сопротивления движению поручня. Причиной возникающего при этом неравномерного захвата является разница в коэффициентах трения. Приводной ролик, контактирующий с резиновой поверхностью с высоким коэффициентом трения, будет поворачиваться на пропорционально больший угол захвата, тогда как другой приводной ролик входит в зацепление с внутренней поверхностью поручня, имеющей низкий коэффициент трения, и будет поворачиваться на меньший угол захвата. Различные углы поворота подшипников, выполненных с возможностью поворота, вызывают смещение линий зацепления для обоих приводных роликов, что, в свою очередь, приводит к образованию S-образного пути прохождения ролика. Возникающие в результате деформации поручня сокращают срок службы поручня. Желательно исключить или ограничить неравномерное натяжение приводных роликов, чтобы не допустить S-образного деформирования поручня.
Цель изобретения - разработка привода поручня, который обеспечивает сбалансированное, фактически равное натяжение обоих приводных роликов.
С целью достижения сбалансированного натяжения роликов оба подшипника, выполненные с возможностью поворота, соединены друг с другом таким образом, что подшипник, на который действует максимальный крутящий момент, будет передавать на другой подшипник этот крутящий момент. Соединение может быть выполнено с помощью передаточного рычага, соединенного с подшипниками, или в виде зубчатой передачи, соединенной с подшипниками, т.е. это может быть любое соединение, передающее крутящий момент. С помощью вышеназванного соединения подшипников, выполненных с возможностью поворота, подшипник, на который действует максимальный крутящий момент, будет управлять степенью натяжения ролика, передавая максимальную крутящую нагрузку на другой подшипник. Таким образом, оба подшипника всегда поворачиваются на одинаковый внутренний угол.
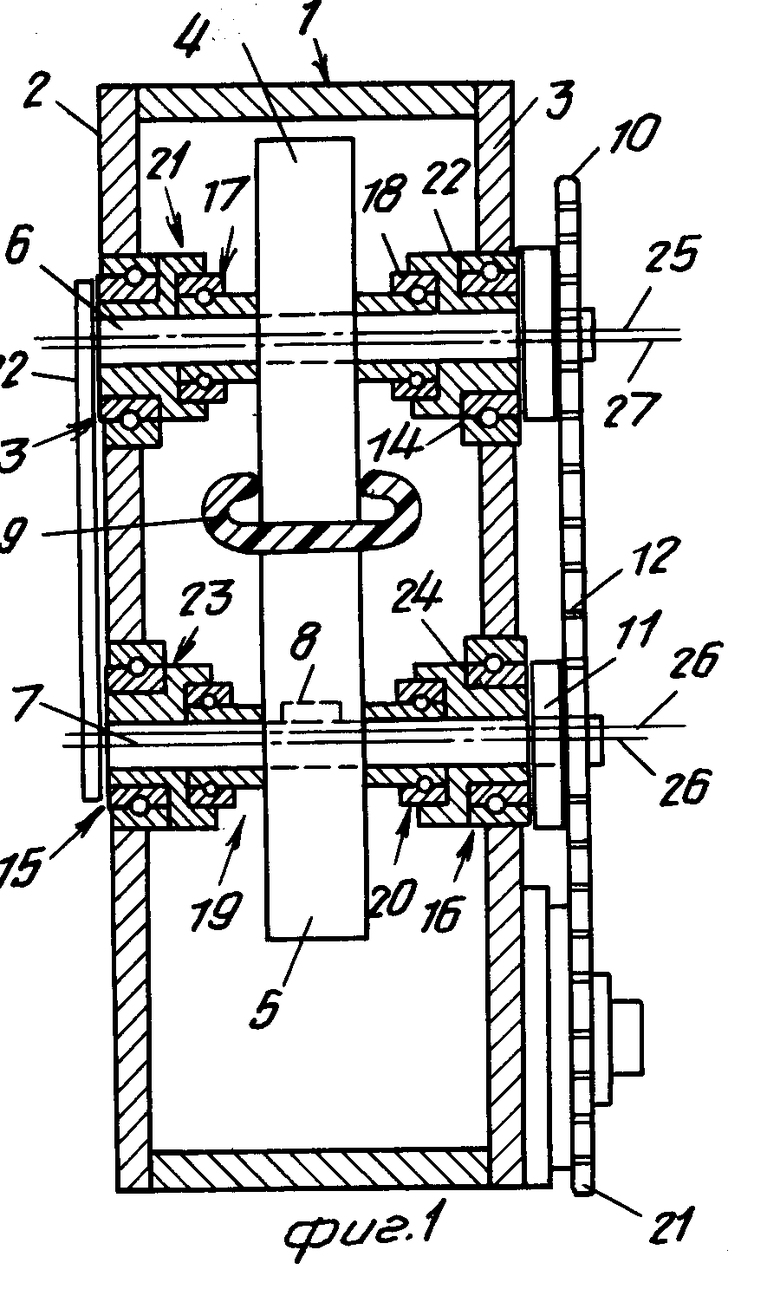
На фиг. 1 показано приводное устройство, разрез; на фиг.2 - то же, вид сбоку; на фиг.3 - то же, вариант выполнения.
Корпус 1 механизма привода содержит две противоположные боковые стенки 2 и 3. Приводные ролики 4 и 5 смонтированы на осях 6 7 соответственно, и закреплены шпонками 8 (показана только одна из шпонок). Ролики 4 и 5 образуют захват, через который проходит поручень 9. Цепные колеса 10 и 11 закреплены шпонками 12 на осях 6 и 7. Таким образом, ролики 4 и 5, соответствующие им оси 6 и 7, а также цепные колеса 10 и 11 вращаются согласованно. Подшипники 13 и 14 смонтированы на стенках 2 и 3 корпуса подобно подшипникам 15 и 16. Подшипники 17,18,19 и 20 осей установлены на осях 6 и 7. Втулка 21 соединяет друг с другом подшипники 13 и 17, а аналогичные втулки 22,23 и 24 соединяют друг с другом подшипники 14,18.15 и 19,16 и 20. В результате оси 6 и 7 вращаются во втулках 21, 22, 23 и 24. Дополнительно втулки 21,22,23 и 24 могут вращаться относительно стенок 2 и 3 корпуса в подшипниках 13,14,15 и 16.
На фиг.1 механизм показан в состоянии покоя, т.е. цепные колеса 10 и 11 не вращаются, а поручень 9 неподвижен. Центральная линия оси 6 обозначена позицией 25, а центральная линия оси 7 - позицией 26. Центральные линии подшипников 13, 14 и втулок 21, 22 обозначены позициями 15 и 16, центральные линии втулок 23 и 24 обозначены позицией 26. Центральные линии 25 и 27 смещены, центральные линии 27 и 26 расположены ближе друг к другу, а центральные линии 25 и 26 - ближе к поручню 9 и захвату. Устройство сконструировано так, что в состоянии покоя ролики 4 и 5 создают лишь небольшое давление на поручень 9, что центральные линии 25 и 26 расположены на максимально возможном расстоянии друг от друга. Подшипники 13 и 15 соединены рычагами 28.
Рычаг 28 шарнирно соединен с подшипниками 13 и 15 через штифты 29 и 30, установленные в положениях "3 часа" и "9 часов" на внутренних кольцах подшипников 13 и 15. При движении в корпусе 1 поручня 9 слева направо (фиг.2) при натяжении роликов 4 и 5 относительно поручня 9 внутренние кольца подшипников 13 и 15 будут вращаться в направлении стрелок А и Б. Это вызывает поворот центральной линии 25 и центральной линии 26 осей 6 и 7 привода относительно центральных линий подшипников 27 и 26 на внутренние углы σ1 и σ2. В случае отсутствия связующего соединения при высоких нагрузках угол σ1 может быть приблизительно в два раза больше угла σ2, так как ролик 5 контактирует с наружной поверхностью поручня 9, имеющей высокий коэффициент трения, а ролик 4 с внутренней поверхностью поручня 9 с низким коэффициентом трения (фиг.1). Однако рычаг 28 обеспечивает приблизительное равенство углов σ1 и σ2. В результате соответствующие контактные линии роликов 4 и 5 и противоположных сторон поручня 9 будут находиться в одной вертикальной плоскости, а поручень 9 не испытывает S-образного изгиба.
В другом варианте (фиг.3) конструкции поворотного уравновешивающего соединения между двумя подшипниками 13 и 15 подшипник 13 имеет зубчатое колесо 29, закрепленное на его внутреннем кольце. Зубчатое колесо 30 закреплено на внутреннем кольце подшипника 15. Зубчатые колеса 29 и 30 поворачиваются вместе с внутренними кольцами подшипников 13 и 15. Зубчатые колеса 31 и 32 соединяют друг с другом зубчатые колеса 29 и 30 подшипников. В результате поворот зубчатого колеса 30 в направлении по часовой стрелке вызовет поворот зубчатого колеса 28 против часовой стрелки. Промежуточные зубчатые колеса 31 и 32 вращаются на осях 33 и 34, опирающихся на боковую стенку 2. Оси 33 и 34 не смещаются в угловом направлении. Таким образом, зубчатые колеса 29, 31, 32 и 34 обеспечивают поворот осей 6 и 7 приводных роликов на практически одинаковый угол при натяжении роликов 4 и 5 относительно поручня 9.
Устройство привода поручня повышает долговечность поручня, обеспечивая его работу при относительно высоких нагрузках. Уравновешивание давления роликов для пары приводных роликов создает равное разделение составляющих нагрузки на поручень и предотвращает образование S-образного изгиба поручня при прохождении через захват роликами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПОРУЧНЯ | 1992 |
|
RU2076254C1 |
| ЭСКАЛАТОРНОЕ ЗАЩИТНОЕ УСТРОЙСТВО ВХОДНОЙ КОРОБКИ ДЛЯ ПОРУЧНЯ ЭСКАЛАТОРА | 1990 |
|
RU2015101C1 |
| КАБИНА ЛИФТА | 1989 |
|
RU2015100C1 |
| БАЛЮСТРАДА И СПОСОБ СБОРКИ БАЛЮСТРАДЫ | 1994 |
|
RU2091546C1 |
| БАЛЮСТРАДА | 1994 |
|
RU2087644C1 |
| СПОСОБ КОНТРОЛЯ РАБОТЫ КОЛОДОЧНОГО ТОРМОЗА И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ КОНТРОЛЯ РАБОТЫ КОЛОДОЧНОГО ТОРМОЗА | 1992 |
|
RU2081013C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ДВЕРИ ЛИФТА | 1994 |
|
RU2124469C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1992 |
|
RU2094354C1 |
| УЗЕЛ КАБИНЫ ЛИФТА (ВАРИАНТЫ) | 1995 |
|
RU2103219C1 |
| ЛИФТ | 1990 |
|
RU2021964C1 |


Использование: изобретение относится к автоматическим самонатягивающимся устройствам приводов поручня эскалатора. Сущность: в приводе поручня используется одна или несколько пар приводных роликов, образующих захват, через который пропускается поручень. Приводные ролики смонтированы на осях, установленных эксцентрично в подшипниках, выполненных с возможностью поворота. Приводные ролики автоматически натягиваются относительно поручня при увеличении трения между роликами и поручнем вследствие повышения сопротивления движению поручня. Выполненные с вомзожностью поворота подшипники соединены друг с другом, что обеспечивает одинаковое натяжение роликов по разные стороны от поручня. В результате предотвращения S - образный изгиб поручня при прохождении поручня через захват приводных роликов. 3 з.п. ф-лы, 3 ил.
| Патент США N 4901839, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
