Настоящее изобретение относится к лифтам, а более конкретно к устройствам и способам приведения в действие дверей лифта.
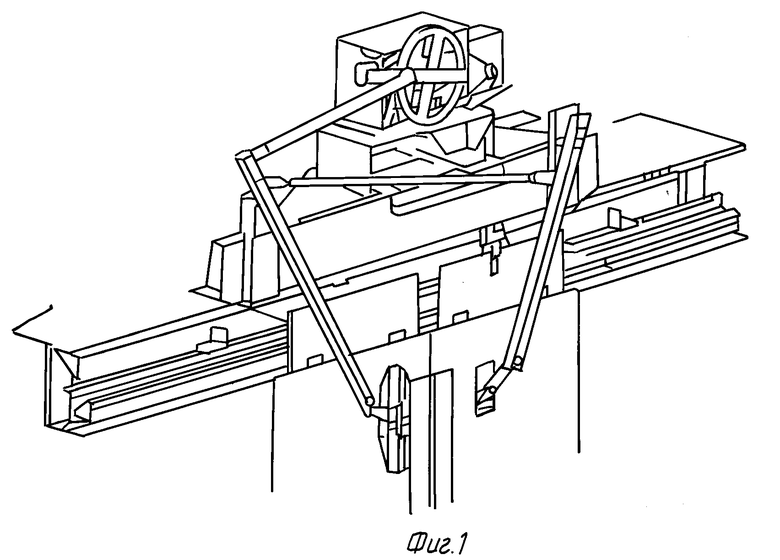
Дверная система лифта обычно состоит из одной или двух раздвижных дверей с приводом для автоматического их открывания и закрывания. Существующие дверные панели раздвигают в горизонтальной плоскости для обеспечения доступа в кабину лифта и закрывают для обеспечения безопасности пассажиров лифта. Обычно эти автоматические системы приводили в действие посредством электродвигателя, создающего, как показано на фиг. 1, вращающий момент. Показана также механическая рычажная система, которая преобразует вращающую силу, создаваемую электродвигателем, в линейную силу, необходимую для перемещения двери. Два широко распространенных вида механических рычажных передач включают рычажную передачу с двумя тягами и ходовой винт.
Предлагаемая идея в соответствии с настоящим изобретением заключается в замене комбинации вращательного электродвигателя и рычажной передачи линейным электродвигателем. Линейные электродвигатели уже были предложены ранее для приведения в действие раздвижных дверей и дверей лифта.
Например, в патенте США N 3462883 показана скользящая (раздвижная) дверь с приводом от линейного асинхронного двигателя, имеющего схему управления, содержащую несколько выключателей, последовательно приводимых в действие дверью, движущейся в том или другом направлении, для осуществления переменного замедления. Для модификации управления замедлением используют также восприятие скорости.
В патентах США N 4067144 и N 4090113 раскрыт способ приведения в движение двери автоматической дверной системы посредством линейного электродвигателя, установленного в автоматической дверной системе. Дверь приводят в движение посредством нормальной движущей силы, увеличивающейся на конечной части хода двери для преодоления силы реакции амортизирующих устройств, вступающих в действие в конце хода двери.
В патенте США N 3872622 раскрыт линейный двигатель для приведения в действие пары скользящих дверей, в котором статор неподвижно закреплен относительно рамы дверей, а якорь соединен с системой шкивов и тросов с возможностью перемещения вместе с ней для осуществления открытия дверей. Предусмотрены средства для регулирования положения оси вращения шкивов в трех плоскостях для регулирования натяжения троса и регулирования ориентации шкивов относительно друг друга.
Известно применение линейных двигателей для различных типов дверей, как показано, например, в патентах США NN 5134324, 4858452, 4188552, 3793944, 4365442 и 3708915.
Известно применение для линейных двигателей различных схем регулирования скорости и схем управления, таких, как показаны в патенте США N 3891907 и описании к патенту Великобритании N 1148144.
Однако поскольку является желательным устанавливать линейный двигатель у верхнего или нижнего конца приводимой в движение двери, то в этом случае будет возникать нежелательный вращающий момент, действующий на дверь и обусловленный наличием плеча для горизонтальной оси. Это плечо, являющееся расстоянием между точкой приложения горизонтальной силы и центром тяжести дверного блока, остается постоянным на всем протяжении хода двери. Этот нежелательный вращающийся момент может быть значительным и при быстром разгоне двери будет вызывать поворот (колебание) двери вокруг ее центра тяжести. Как показано на фиг. 1, эту проблему дверей, движущихся с большим ускорением, решают путем размещения точки крепления где-то вблизи середины двери, или близко к центру тяжести, с тем чтобы максимально уменьшить проблему возникновения крутящего момента, которая в противном случае имела бы место.
Кроме необходимой горизонтальной силы, линейный двигатель создает также силу притяжения между неподвижной и подвижной частями двигателя. В соответствии с известным уровнем техники, не относящимся к дверным системам, например, при использовании линейного двигателя для подъема лифта в шахте эту силу воспринимали посредством роликов или подшипников, расположенных на неподвижной части двигателя, обеспечивая тем самым сохранение воздушного промежутка (зазора), необходимого между подвижной и неподвижной частями двигателя.
Целью настоящего изобретения является управление дверью лифта с линейным электродвигателем с одновременным уменьшением до минимума нежелательных вращающих моментов.
В соответствии с настоящим изобретением для уравновешивания вращающихся моментов, возникающих при приведении двери в движение в местах, иных, чем находящиеся на линии, проходящей через центр тяжести двери, используют силу притяжения между неподвижной и подвижной частями линейного двигателя.
Еще в соответствии с настоящим изобретением дверь лифта перемещают посредством линейного двигателя путем вырабатывания управляющего сигнала, изменяющегося по величине с перемещением двери, для противодействия действующему на дверь первому вращающему моменту, вызываемому приложенной к двери нормальной силой, действующей на плече переменной длины относительно центра тяжести двери, и - в ответ на управляющий сигнал - изменение величины приложенной к двери линейной силы, действующей на плече постоянной длины относительно центра тяжести двери, для создания второго вращающего момента, противоположного первому вращающемуся моменту, и тем самым обеспечения противодействия первому вращающему моменту.
Далее в соответствии с настоящим изобретением во время открывания или закрывания двери первый и второй вращающие моменты уменьшают с уменьшением длины переменного плеча до нуля в точке, где переменное плечо пары сил равно нулю, после чего первый и второй вращающие моменты увеличивают с увеличением длины переменного плеча, до тех пор пока не будет закончена операция закрывания или открывания двери.
Также в соответствии с настоящим изобретением первый и второй вращающие моменты уменьшают и увеличивают линейно относительно положения двери.
Еще в соответствии с настоящим изобретением для обеспечения уравновешивания крутящих моментов на протяжении всего хода двери можно использовать заданный профиль (эпюру) сил и скоростей.
Далее в соответствии с настоящим изобретением во время открывания или закрывания двери горизонтальную скорость двери изменяют по кривой, приближающейся к эллипсу с одной стороны его большой оси.
В соответствии с настоящим изобретением также используют нормальную силу, чтобы приподнять дверь для уменьшения гравитационных сил, действующих на горизонтальные средства направления движения двери.
Кроме того, в соответствии с настоящим изобретением нормальную силу сохраняют постоянной. Нормальную силу выбирают таким образом, чтобы обеспечить частичное магнитное приподнимание двери для уменьшения гравитационной нагрузки на ролики двери и другие элементы подвески, с тем чтобы увеличить их срок службы и уменьшить акустический шум.
Далее в соответствии с настоящим изобретением в ответ на воспринятый сигнал положения двери вырабатывают один или несколько управляющих сигналов. Регулирование нормальной силы линейного двигателя можно осуществлять цифровыми методами для обеспечения более надежного уравновешивания вращающих моментов. Регулирование может быть осуществлено путем восприятия положения и скорости движения двери и регулирования частоты возбуждения и скольжения двигателя для получения одновременно требуемых нормальной и линейной сил. Для обеспечения уравновешивания вращающих моментов на всем пути движения двери может быть выбран определенный профиль сил и скоростей.
И еще в соответствии с настоящим изобретением управляющие сигналы могут быть выработаны по разомкнутому циклу в ответ на командный сигнал открывания или закрывания двери.
Предлагаемые идеи обеспечивают замену комбинации вращательного электродвигателя и рычажной передачи линейным электрическим двигателем. Эти идеи дают несколько существенных преимуществ, которые включают:
1. Существенное уменьшение количества подвижных частей, что может обеспечить намного большую надежность и уменьшенный износ приводной системы дверей;
2. Более плавную и спокойную работу благодаря уменьшению массы рычажного механизма и нагрузок на подвеску дверей;
3. Снижение затрат благодаря упрощению монтажа и технического обслуживания; и
4. Плавное ухудшение характеристик системы в случае нарушения нормальной работы.
Решение вышеупомянутой технической задачи в соответствии с настоящим изобретением обеспечивается способом перемещения двери лифта, согласно которому с помощью линейного электродвигателя прикладывают к двери линейную и нормальные силы, действующие на плечах соответственно постоянной и переменной длины относительно центра тяжести двери и вызывающие противоположно направленные вращающие моменты, один из которых, обусловленный нормальной силой, изменяется по величине с перемещением двери, причем управляют линейным электродвигателем с изменением величины прикладываемой к двери линейной силы в процессе перемещения двери и уравновешивают упомянутые вращающие моменты во всех точках хода двери, и устройством для перемещения двери лифта, содержащим линейный электродвигатель, неподвижная часть которого укреплена на кабине лифта, а подвижная часть - на двери, узел вырабатывания управляющего сигнала, связанный с неподвижной частью линейного электродвигателя через узел управления, причем упомянутый узел вырабатывания выполнен с возможностью вырабатывания управляющего сигнала, а узел управления - с возможностью формирования воздействия на линейный электродвигатель, изменяющихся с перемещением двери и обеспечивающих изменение прикладываемой к двери линейной силы для уравновешивания противоположных по направлению вращающих моментов, вызываемых линейной и нормальной силами, действующими на плечах соответственно постоянной и переменной длины относительно центра тяжести двери.
Указанные и другие цели, признаки и преимущества настоящего изобретения будут более ясны из подробного описания наилучших вариантов его осуществления со ссылками на прилагаемые чертежи, на которых:
фиг. 1 - изображение известного привода (типа OVL), в котором вращательное движение электродвигателя преобразуют в линейное движение посредством рычажной передачи;
фиг. 2 - изображение пары дверей лифта, приводимых в соответствии с настоящим изобретением в движение посредством линейных двигателей;
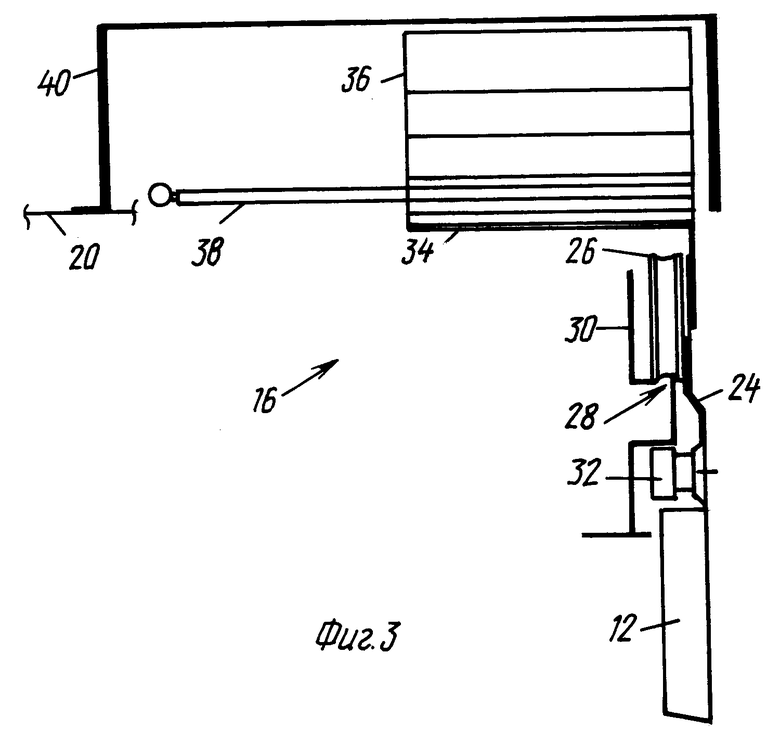
фиг. 3 - вид сбоку схемы установки двигателя привода дверей в соответствии с настоящим изобретением;
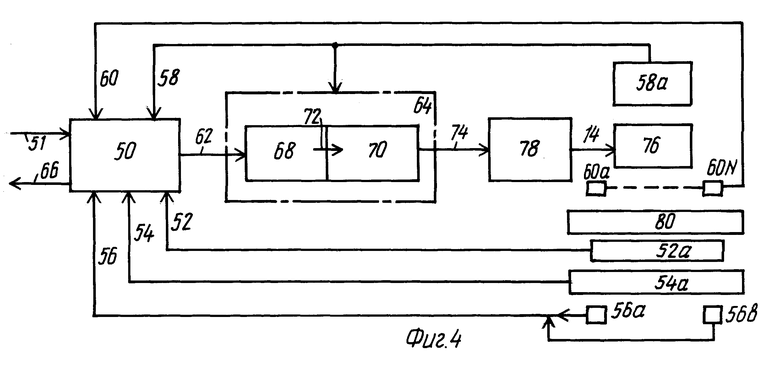
фиг. 4 - система управления в соответствии с настоящим изобретением;
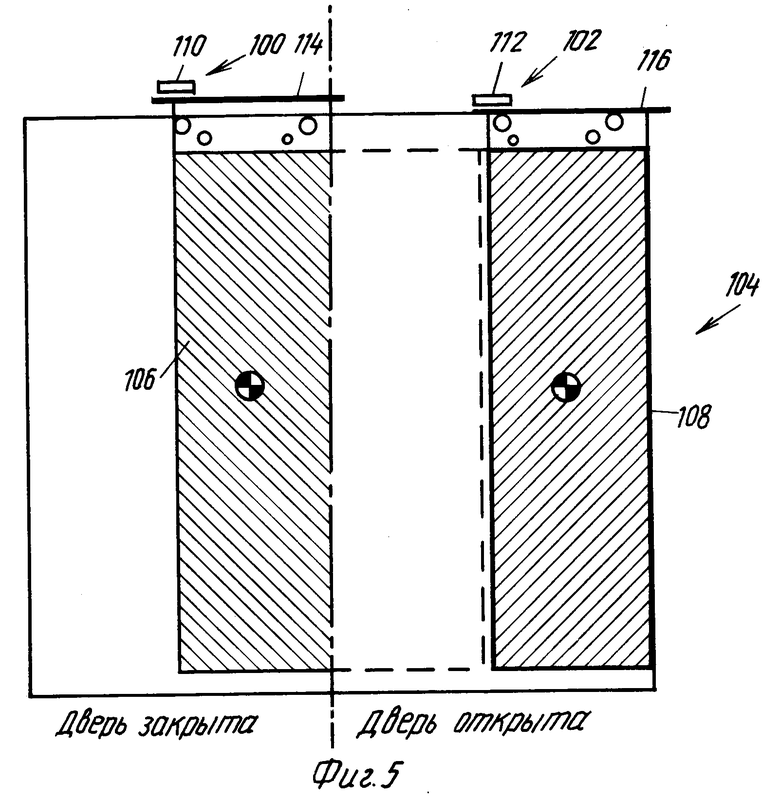
фиг. 5 - изображение дверной системы с приводом от линейных двигателей в соответствии с настоящим изобретением;
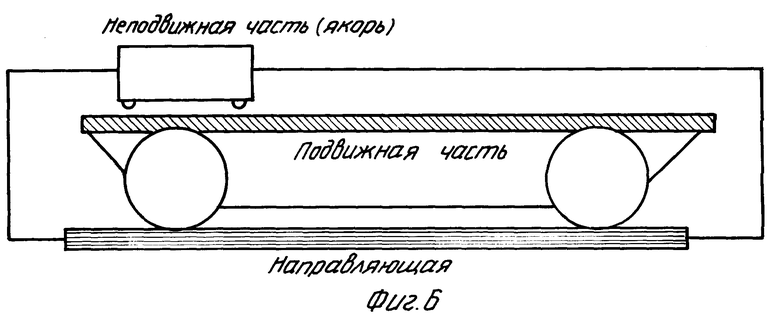
фиг. 6 - схематическое изображение линейного двигателя для иллюстрации того, что, кроме линейной (движущей) силы, создаваемой двигателем, создается значительная нормальная сила притяжения между неподвижной и подвижной частями двигателя (приблизительно в 0,5-10 раз больше, чем движущая сила), которая в соответствии с настоящим изобретением может быть с выгодой использована для приподнимания двери, чтобы уменьшить гравитационные силы, действующие на горизонтальное средство направления движения двери, и для уравновешивания нежелательных вращающихся моментов;
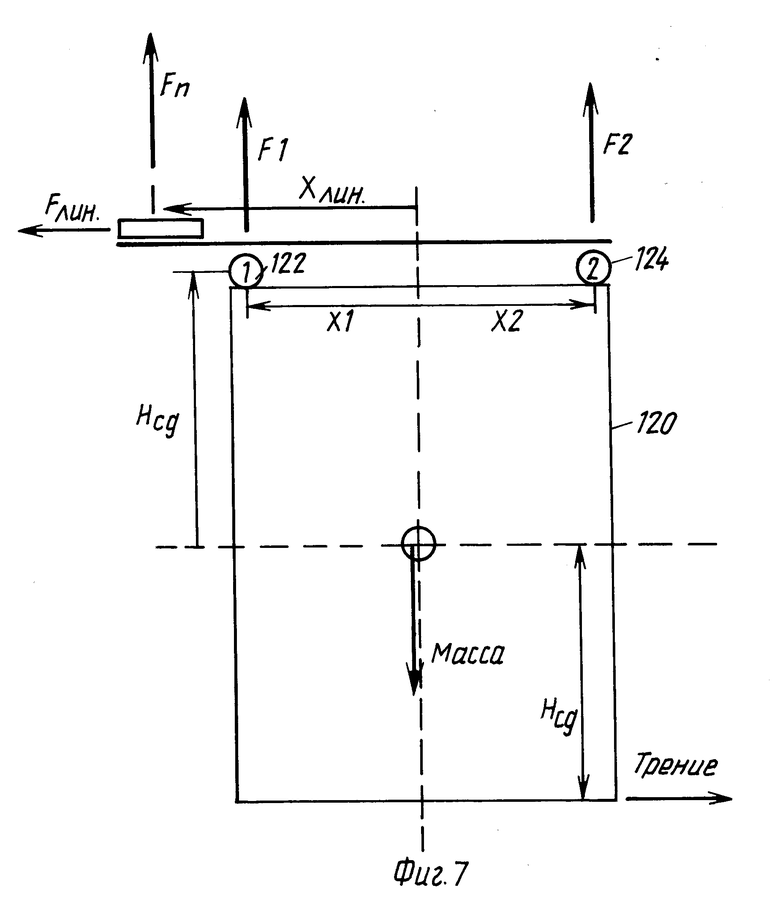
фиг. 7 - изображение действующих на дверь составляющих сил, регулируемых в соответствии с настоящим изобретением;
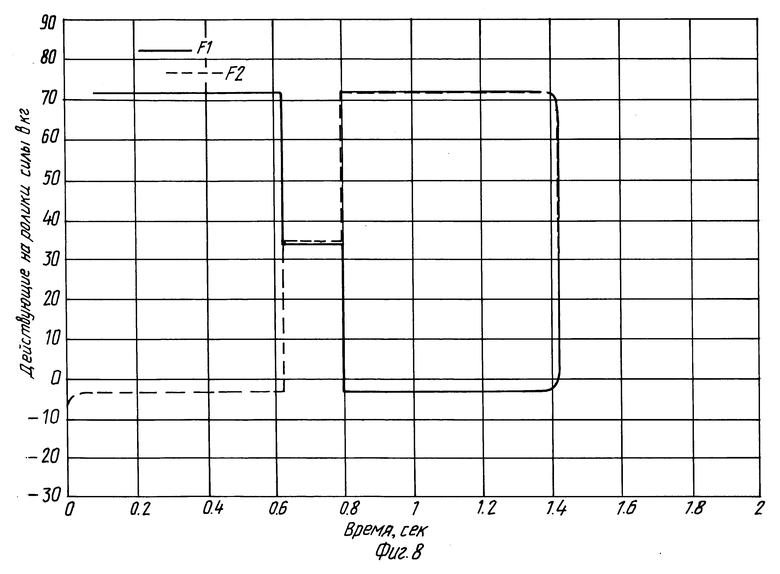
фиг. 8 - изображение, иллюстрирующее нагрузки на ролики, показанные в зависимости от времени, для плавающего крепления неподвижной части двигателя;
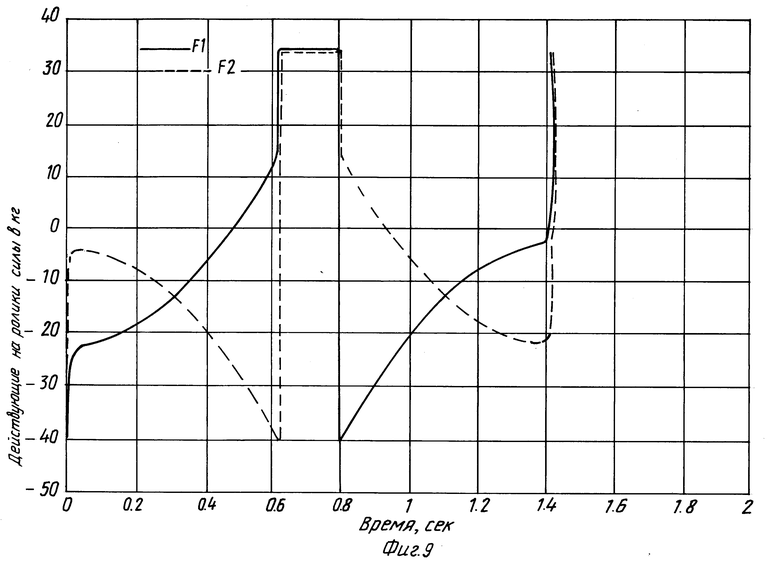
фиг. 9 - изображение, иллюстрирующее действующие на ролики силы для жесткого крепления неподвижной части двигателя;
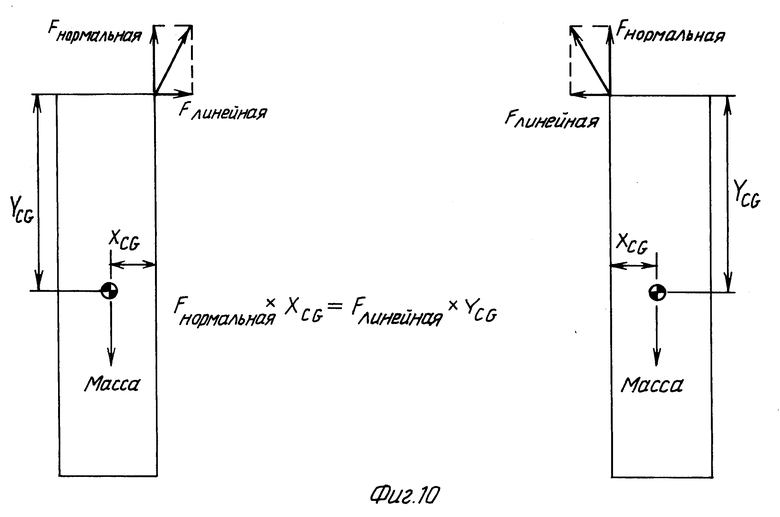
фиг. 10 - изображение, иллюстрирующее устранение вращающего момента в соответствии с настоящим изобретением;
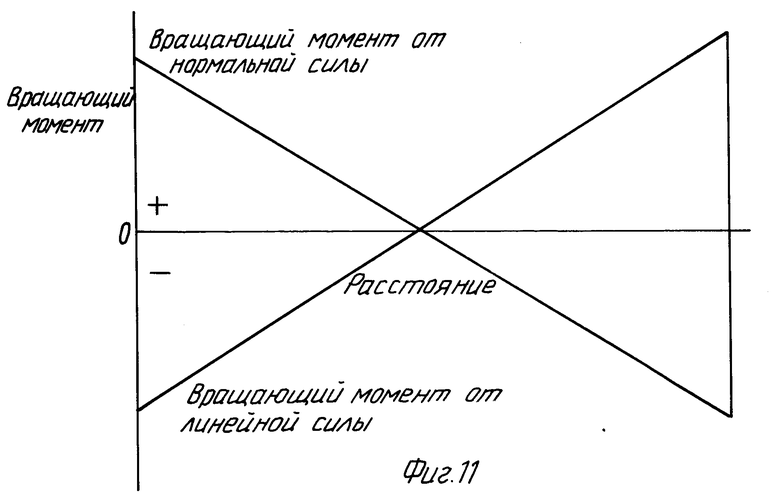
фиг. 11 - изображение, иллюстрирующее уравновешивание вращающего момента от линейной силы вращающим моментом от нормальной силы в соответствии с настоящим изобретением;
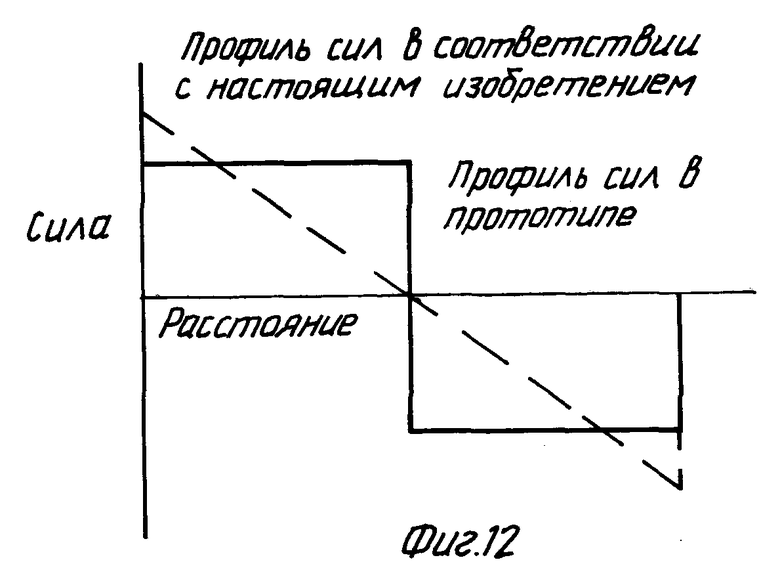
фиг. 12 - изображение профиля (эпюры) сил, изменяющегося линейно при изменении положения двери, что обеспечивает в соответствии с настоящим изобретением исключение вращающего момента на всем протяжении хода двери;
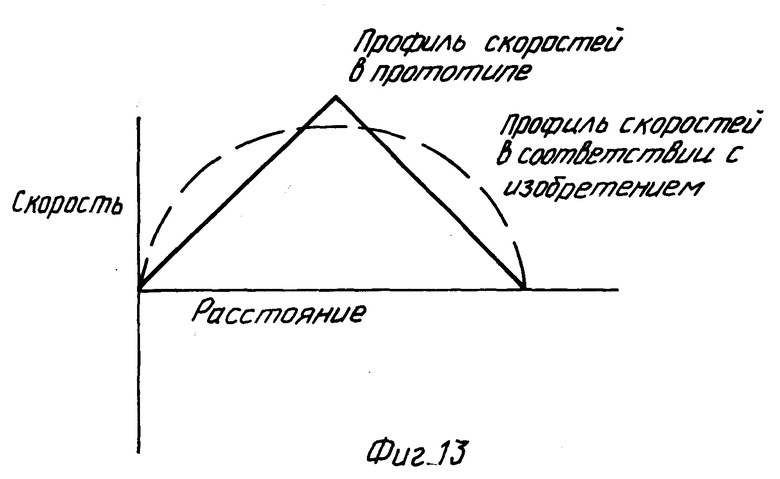
фиг. 13 - изображение, иллюстрирующее эпюру скоростей в соответствии с настоящим изобретением;
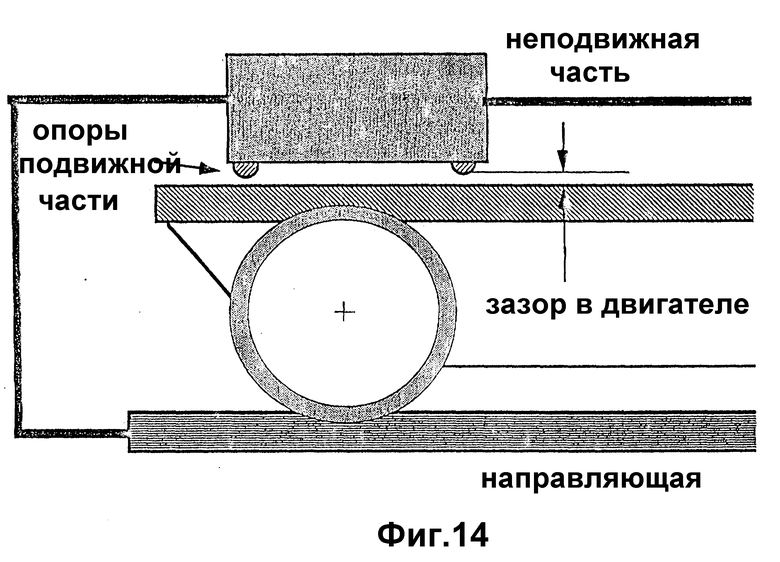
фиг. 14 - более подробное схематическое изображение линейного двигателя согласно фиг. 6, на котором показан воздушный зазор в двигателе, имеющий важное значение для обеспечения уравновешенного ускорения в соответствии с настоящим изобретением;
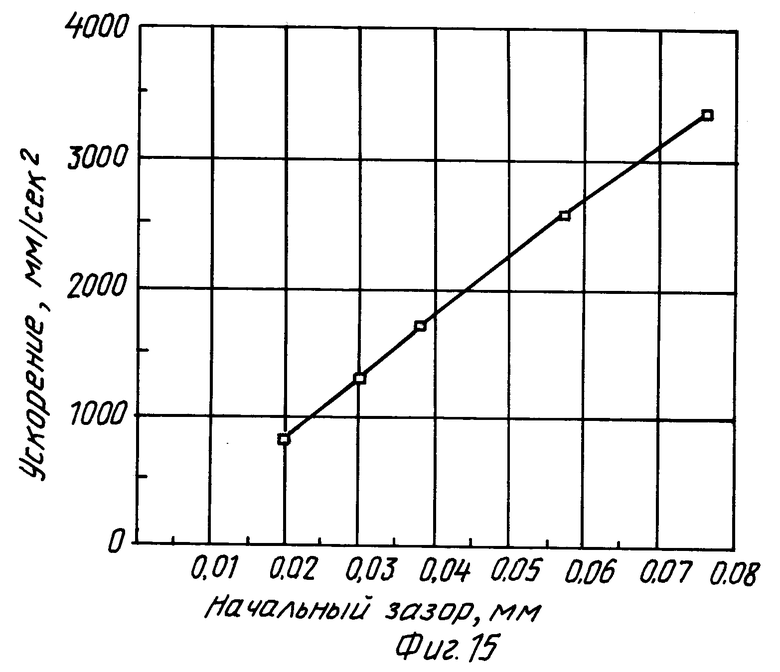
фиг. 15 - зависимость между первоначальным зазором и необходимым для уравновешивания вращающих моментов ускорением для стенда для испытания масштабной модели двери в соответствии с настоящим изобретением;
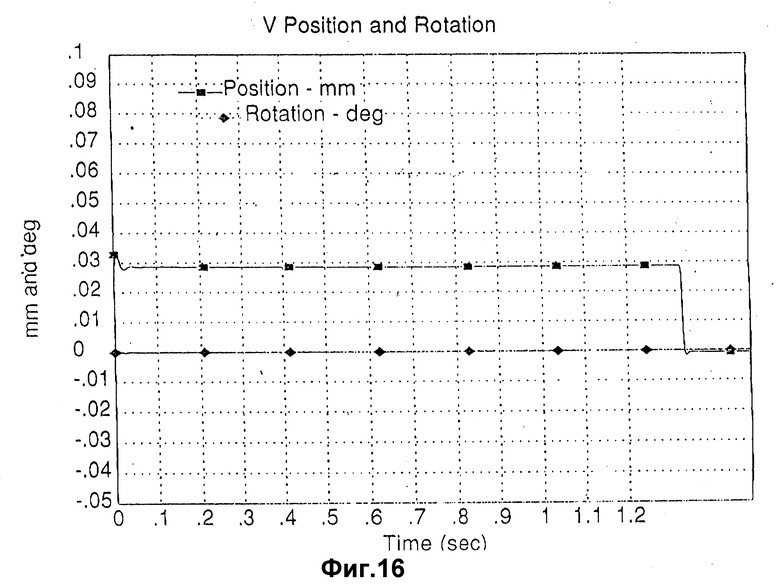
фиг. 16 - теоретическая зависимость от времени вертикального положения и поворота двери, которая показывает, что в соответствии с настоящим изобретением дверь фактически поднимается на небольшую величину во время перемещения из одного положения в другое;
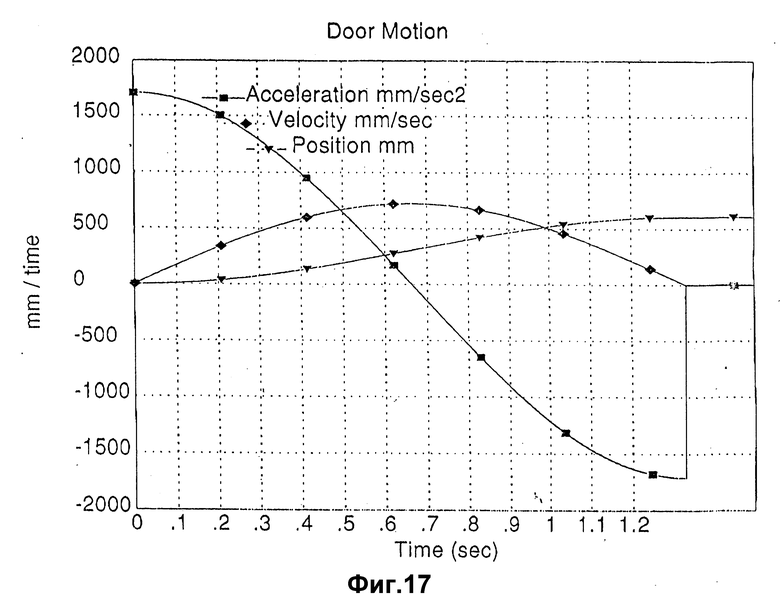
фиг. 17 - движение двери, включая ускорение, скорость и положение, в зависимости от времени в соответствии с настоящим изобретением;
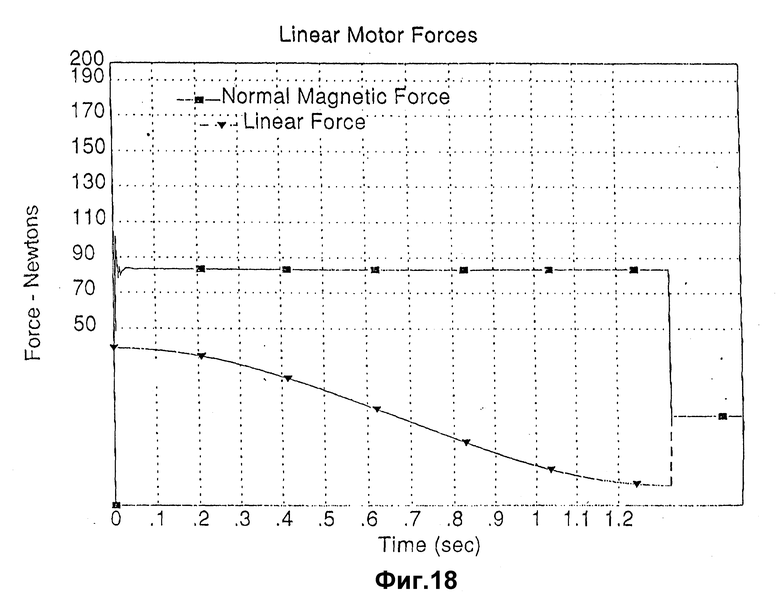
фиг. 18 - график зависимости от времени сил в линейном двигателе, включая нормальную магнитную силу и линейную силу, в соответствии с настоящим изобретением;
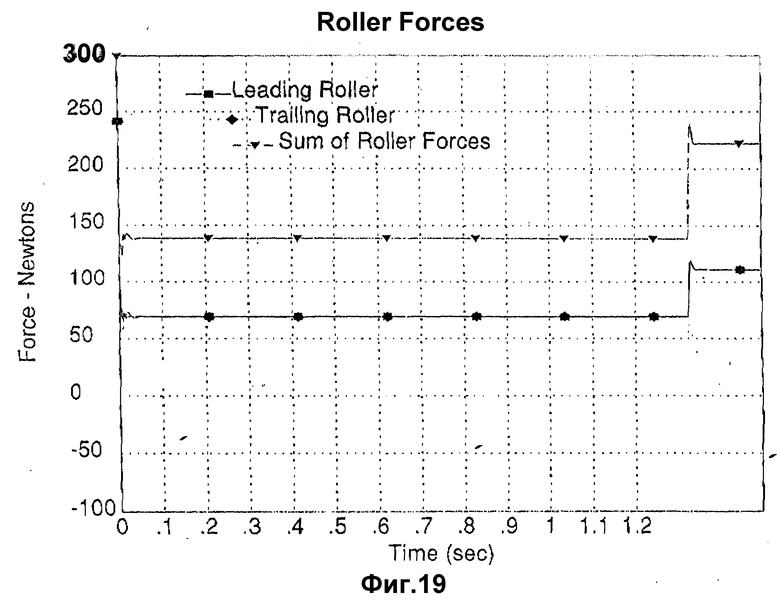
фиг. 19 - графическая зависимость от времени действующих на ролики сил, включающих силы, действующие на передний (набегающий) и задний (сбегающий) ролики, и сумму этих сил, показывающая, что силы, действующие на передний и задний ролики, одинаковы, что свидетельствует о полном исключении вращающих моментов в соответствии с настоящим изобретением.
На фиг. 2 показана пара 10 дверей 12, 14 лифта в закрытом положении, причем в соответствии с настоящим изобретением на верхней опоре 20 и дверях 12, 14 закреплены приводные линейный двигатели 16, 18 для открывания и закрывания дверей 12, 14 с совершением ими возвратно-поступательного движения, как в случае открывания и закрывания посредством известного устройства, показанного на фиг. 1.
На фиг. 3 показан вид сбоку левой двери 12, прикрепленной к дверной подвеске 24 (показанной также на фиг. 2), которая содержит ролик 26 для качения по возвышенной части 28 дверной направляющей 30, которая может быть выполнена в форме, обеспечивающей возможность контакта качения также и с вторым роликом 32. Направляющая 30 может быть прикреплена к опоре 20, показанной на фиг. 2. Подвеска 24 может быть также использована для поддержания реактивной пластины 34, иногда называемой подвижной (вторичной) частью линейного двигателя, содержащего отдельную неподвижную (первичную) часть 36, установленную на опоре 20 посредством, например, крепления 38. На обеих фиг. 2 и 3 показан также пылезащитный кожух 40.
Из описания фиг. 2 и 3 очевидно, что неподвижная часть линейного двигателя в показанном варианте закреплена на опоре 20, а подвижная часть прикреплена к двери и, следовательно, подвижна относительно неподвижной части. Неподвижная часть может иметь вид относительно небольшого комплекта обмоток, возбуждаемых посредством одного или нескольких изменяющихся во времени электрических сигналов для создания изменяющихся во времени электромагнитных полей, заставляющих подвижную часть линейного двигателя перемещаться относительно неподвижной части.
Такой линейный двигатель производит ф. "Краусс Маффей", которая производит также линейные непосредственные приводы для управления движением линейного двигателя. Их можно найти в серии изделий ф. "Краусс Маффей" под серийным N LIM-E Series Single-Cam Linear Motors. Брошюру, в которой описана эта серия, можно получить от представителя ф. "Краусс Маффей А" в США, т.е. от "Аутомэйшн энд серво текнолоджис, Инк.", Танксис Роуд 1, Симсбери, Коннектикут, США. Эти приводы и двигатели имеют известные характеристики и могут быть приспособлены для описанного здесь применения в лифтах. В общем, система управления содержит транзисторный инвертор переменного тока с импульсным управлением, который реагирует на управляющие сигналы от системы дистанционного управления для подачи, например, энергии трехфазного тока на обмотки неподвижной части линейного двигателя. Система дистанционного управления чувствительна к заданным значениям регулирующего параметра и может быть частью замкнутой цепи, например она может реагировать на воспринятый сигнал положения, имеющий величину, показывающую относительное перемещение между подвижной и неподвижной частями линейного двигателя. Систему линейного измерения, пригодную для такого линейного измерения, производит ф. "Краусс Маффей". Понятно, что такая система управления может быть не замкнутой, а разомкнутой, а также может быть выполнена не в виде контура с регулированием по положению, а в виде привода с регулированием по скорости, одноосного позиционирующего привода, привода с регулированием по положению, линейного силового исполнительного механизма или любой другой требуемой конфигурации.
Например (но не в качестве ограничения), на фиг. 4 показана блок-схема привода предлагаемой дверной системы. Компьютерная система 50 управления реагирует на рабочие команды и некоторые или все из ряда воспринятых сигналов, включающих воспринятый сигнал положения, поступающий по линии 52, сигнал обнаружения препятствия, поступающий по линии 54, сигнал ограничения хода, поступающий по линии 56, воспринятый сигнал обратной ЭДС, поступающий по линии 58, и воспринятый сигнал силы или нагрузки, поступающий по линии 60, для вырабатывания управляющего сигнала, идущего по линии 62 к устройству 64 управления двигателем, которое может также реагировать на воспринятый сигнал обратной ЭДС, поступающий по линии 58. Компьютерная система 50 управления может также выдавать информацию о существующем состоянии по линии 66. Компьютерная система управления получает рабочие команды от других систем или подсистем лифта или здания по сигнальной линии 51 и заставляет дверную систему выполнять различные операции (например, открывания, закрывание, остановку, обратный ход и т.д.). Как было сказано выше, компьютерная система 50 управления может снабжать другие системы по линии 66 информацией о существующем состоянии, описывающей состояние дверной системы. Компьютерная система управления принимает входные сигналы от различных датчиков и на основе хранимых в ней алгоритмов выполняет такие функции, как создание профилей (эпюр) движения для дверей, вычисление фазы и тока для привода двигателя, регулирование положения, скорости и ускорения дверей (по разомкнутому или замкнутому циклу), контроль характеристик дверной системы и всякие другие функции, полагаемые необходимыми для обеспечения требуемых рабочих характеристик дверной системы.
При использовании замкнутой системы регулирования по положению датчик 52а положения подает сигнал по линии 52 в блок сравнения (не показан), где этот сигнал сравнивают с командным сигналом положения, которым может быть сигнал, поступающий по линии 51, или который может быть выработан в самой компьютерной системе 50 управления (этот случай не показан). Блок сравнения вырабатывает разностный сигнал, который может быть подан в компенсационную схему, такую, как схема пропорционального регулирования, схема пропорционального и интегрального регулирования, схема пропорционального, интегрального и дифференциального регулирования или любая другая компенсационная схема, которая может потребоваться. Компенсационная схема вырабатывает управляющий сигнал, идущий по линии 62. Конечно, вместо описанного выше устройства сравнения, работающего по более или менее аналоговому принципу, весь процесс можно осуществлять цифровым методом посредством дискретных компонентов или посредством программного обеспечения в микропроцессоре общего назначения, как известно рядовому специалисту в области реализации алгоритмов системы управления.
Устройство 64 управления двигателем может содержать схемы 68, обеспечивающие подходящие соотношения по времени и фазе, необходимые для создания требуемых сил (линейных и/или нормальных) в линейном двигателе. Мощные формирователи 70 усиливают сигналы на линии 72 от логических схем регулирования по фазе и времени для обеспечения подачи подходящей электрической энергии по линии 74 к обмоткам 76 якоря (неподвижной части) линейного двигателя. Конечно, сигнал на линии 74 может быть воспринят датчиками 78 тока в обмотках двигателя, которыми могут быть датчики любого требуемого типа. Датчики 78 тока подают воспринятые сигналы (не показаны) обратно в компьютерную систему 50 управления для обеспечения обратной связи по замкнутому циклу, такой, как уже была описана в связи с датчиками 52а положения. Следует понимать, что могут быть использованы другие типы воспринятых сигналов вместо сигналов от датчиков, описанных в данном описании для системы управления по замкнутому циклу для управления дверьми. Таким образом, устройство 64 управления двигателем может работать либо по разомкнутому циклу на основе заданных моделей, либо по замкнутому циклу на основе таких моделей, но и с использованием также сигналов обратной связи от необязательных датчиков тока в обмотках двигателя и/или необязательных датчиков положения дверей или любого другого необходимого датчика, например, обеспечивающего обратную связь по скорости или по какому-либо другому воспринятому параметру.
Линейный двигатель согласно фиг. 4, конечно, состоит из двух частей. Неподвижная часть 76 состоит из нескольких полюсов, на которых установлены обмотки двигателя. Подвижная часть 80 состоит из конструкции, которая может перемещаться в поперечном линейном направлении относительно неподвижной части под действием магнитных полей, созданных неподвижной частью. Подвижная часть, поставляемая вышеупомянутым продавцом, т.е. ф. "Краусс-Маффей", выполнена составной для повышения коэффициента полезного действия. Составная подвижная часть - эта такая часть, которая имеет электрические проводники, заделанные в пазах подвижного ярма, что является обычной практикой для вращательных асинхронных двигателей. Однако в соответствии с принципами настоящего изобретения является предпочтительным использованием сплошной подвижной части, состоящей из магнитопроницаемого материала (такого, как железный или стальной брусок), покрытого электропроводящим слоем, например листом меди или алюминия, который способствует уменьшению вибрации и, следовательно шума, создаваемого дверьми, что в некоторых применениях более важно, чем коэффициент полезного действия. Была рассмотрена идея использования подвижной части в виде постоянного магнита, но она была отклонена из-за возможности собирания металлических частиц, находящихся в окружающей среде шахты лифта.
Следует понимать, что датчики, показанные на фиг. 4, необязательны и могут быть включены в электронный привод, показанный на фиг. 4, для обеспечения любой требуемой степени регулирования или другой информации к другим частям системы привода (управления). Как уже было упомянуто, типичные датчики могут включать устройство 52а обратной связи, которое измеряет положение двери, когда она движется туда и обратно. Для регулирования и контроля подачи энергии к неподвижной части линейного двигателя могут быть использованы датчики 78, измеряющие поток, протекающий через обмотки неподвижной части. Для восприятия отдельных положений хода двери могут быть использованы датчики 56a, 56b ограничения хода. Для контроля скорости движения линейного двигателя могут быть использованы датчики 58a обратный ЭДС. Для восприятия наличия препятствий на пути движения двери в приводную систему двери может быть включен детектор 54a обнаружения препятствий, позволяющий компьютерной системе управления выбирать алгоритм управления, предотвращающий контакт с препятствием. Для контроля линейной и нормальной сил и нагрузок, действующих на линейный двигатель в приводную систему могут быть включены датчики 60a, 60b сил и/или нагрузки. Все эти датчики являются просто иллюстрацией полезных устройств, которые могут быть использованы при реализации настоящего изобретения, но необязательно.
На фиг. 5 показана открывающаяся посередине дверь лифта с двумя линейными двигателями 100, 102, каждый из которых приводит в движение одну сторону пары 104 дверей 106, 108. Дверь 106 показана в закрытом положении, а дверь 108 - в открытом. Конечно, эта ситуация не является нормальной, поскольку обычно двери либо открыты, либо закрыты. Подвижная часть каждого линейного двигателя состоит из небольшого (приблизительно 100х150 мм) электрически активного статора 110, 112, надежно закрепленного на раме кабины, например на опоре 20, показанной на фиг. 2 и 3. Электрически пассивная подвижная часть 114, 116 или реакционная пластина (приблизительно 760 х 100 мм) прикреплена к подвижной двери, как описано ранее в связи с фиг. 2 и 3. Конструкция, показанная на фиг. 5, имеет линейную приводную систему, установленную наверху кабины, но это совсем не обязательно для осуществления настоящего изобретения. Конечно, нужно понимать, что настоящее изобретение может быть использовано с одиночной подвижной дверью, а не с парой 104 подвижных дверей, показанной на фиг. 5.
Как показано на фиг. 3, подвижная часть, или реакционная пластина 34 представляет собой просто L-образное продолжение существующей подвески 24 двери кабины. Подвижные части, показанные на фиг. 5, могут быть такими же. На фиг. 3 показано также шарнирно (плавающее) крепление неподвижной части двигателя, которое уже было описано выше. Верхнее, а не нижнее, крепление линейного двигателя выбрано для обеспечения относительно чистой окружающей среды для линейной приводной системы. Дополнительно улучшают возможность обеспечения чистоты реакционной пластины путем использования противозащитного кожуха 40 (фиг. 3), закрывающего всю систему.
Нужно еще раз подчеркнуть, что показанная на фиг. 3 схема крепления неподвижной части двигателя дает плавающее крепление, при котором неподвижная часть может свободно перемещаться в вертикальной плоскости, но ограничена в горизонтальной плоскости, хотя такой подход не является единственным. Другим, лучшим решением является неподвижное крепление, при котором неподвижная часть линейного двигателя ограничена от перемещения и в горизонтальной, и в вертикальной плоскостях. Преимущества неподвижного крепления будут описаны ниже.
Одним из основных факторов, обеспечивающих надлежащую работу линейного двигателя, является тщательное соблюдение воздушного зазора между неподвижной и подвижной частями двигателя. При нормальной работе линейный двигатель создает не только требуемую линейную движущую силу, но и силу притяжения между неподвижной и подвижной частями двигателя, как показано на фиг. 6 и 7. Как представлено на фиг. 7 для правой стороны фиг. 5, когда двери открыты, неподвижная часть линейного двигателя может быть расположена посередине над левым краем двери. Указанная сила притяжения в данном описании названа "нормальной силой". Нормальная сила для линейных двигателей зависит от точности конструкции и электрических характеристик двигателя, но в общем равна создаваемой двигателем необходимой линейной силе, умноженной на величину от 0,5 до 10. Эта сила обеспечивает сближение неподвижной и подвижной частей линейного двигателя друг с другом и должна быть отрегулирована для поддержания надлежащего воздушного зазора между этими двумя частями. В двух описанных выше схемах крепления неподвижной части двигателя используют разные схемы регулирования указанного воздушного зазора.
При плавающем креплении неподвижной части двигателя воздушный зазор регулируют посредством комплекта роликов (такого, как показан на фиг. 6), установленных на той же опоре, что и подвижная часть двигателя. Поскольку неподвижная часть двигателя может свободно перемещаться в вертикальной плоскости, ролики ограничивают все нагрузки от нормальной силы, обеспечивая тем самым надлежащий воздушный зазор. В этом случае нормальная сила не способна уравновешивать вращающие моменты, действующие на дверь. Эта система с использованием плавающей в вертикальном направлении неподвижной части двигателя является самоустанавливающейся, поскольку воздушный зазор обеспечивает компоненты неподвижной части двигателя, и поэтому на него не влияют небольшие изменения в геометрии кабины или дверей, вызываемые, например, температурой, напряжениями и износом.
С другой стороны, схема крепления, при которой неподвижную часть линейного двигателя жестко закрепляют на раме кабины, позволяет использовать массу двери и ее систему подвески для оказания противодействия нормальной силе и обеспечения тем самым надлежащего воздушного зазора. При этой схеме для обеспечения надлежащего воздушного зазора нужно учитывать изменения в геометрии кабины и двери. Но этот способ крепления имеет преимущество, состоящее в обеспечении возможности устранения вращающих моментов с использованием нормальной силы, и поэтому является предпочтительным способом в соответствии с настоящим изобретением.
Что касается нагрузок на подвеску двери, то в соответствии с настоящим изобретением приведение двери лифта в движение сверху, а не в центре тяжести, вызывает воздействие на подвеску дополнительных сил. Схема сил, действующих на типичную дверь 120 лифта, показана на фиг. 7. При движении этой двери с ускорением возникает вращающий момент в плоскости двери с плечом Hсд, показанным на фиг. 7. Обычно противодействие этому вращающему моменту должно быть оказано посредством разницы в нагрузках на ролики 122, 124 дверной подвески, показанных в виде сил F1 и F2. Но при жестком креплении линейного двигателя используют нормальную силу (Fn), создаваемую двигателем, для создания другого вращающего момента, действующего в направлении, противоположном направлению действия вращающего момента от ускорения, и поэтому уменьшающего или исключающего этот вращающий момент.
Таким образом, при использовании приводной системы в виде линейного двигателя имеются две основные силы, действующие на дверную панель в открытом положении, как показано на фиг. 7. Это - создаваемая неподвижный частью движущая сила Fлин. и сила притяжения между неподвижной и подвижной частями двигателя, обозначенная на фиг. 7 как Fn. Как показано на этой фигуре, неподвижная часть линейного двигателя расположена посередине над левым краем двери. Следовательно, линейная сила создает вращающий момент вокруг центра тяжести двери. Величина вращающего момента равна Fлин. • Hсд. Нормальная сила, имеющаяся в линейном двигателе, также создает вращающий момент вокруг центра тяжести двери. Величина этого момент равна Fn • Xсд, причем он действует в направлении, противоположном направлению действия вращающего момента, создаваемого линейной силой. Поэтому, если Fлин. • Hсд = Fсд • Xсд, то результирующая сила проходит через центр тяжести двери, и, следовательно, неуравновешенных вращающих моментов нет.
Для обратного направления движения двери требуемая сила Fлин. направлена в противоположную сторону, и также меняется на противоположное направление действия создаваемого этой силой вращающего момента. Однако направление действия нормальной силы остается тем же самым (вследствие движения двери), а направление плеча меняется на противоположное, и поэтому создается вращающий момент, действующий в противоположном направлении. И опять имеет силу приведенное выше уравнение, и результирующая сила проходит через центр тяжести двери, что определяет отсутствие неуравновешенных вращающих моментов.
На фиг. 8 и 9 показано сравнение нагрузок на подвеску при использовании плавающего и жестко закрепленного линейных приводов с верхним креплением и привода по центру тяжести. Эти данные получены при испытании одиночной двери с ходом 609 мм при ускорении 1290 мм/сек2. Максимальная скорость движения двери была равна 700 мм/сек. Это дало в результате профиль, включающий разгон в течение первых 0,62 секунды, область постоянной скорости и затем замедление, начинающееся при 0,8 секунд. Общее время работы двери было равно 1,4 секунды. В данном примере дверь весила 68 кг.
При использовании привода по центру тяжести, такого, как показан на фиг. 1, вращающий момент не возникает, и нагрузки на подвеску (F1 и F2 на фиг. 7) остаются постоянными на уровне 34 кг/ролик.
При плавающем креплении неподвижной части линейного двигателя вращающий момент, создаваемый линейным приводом, необходимо воспринимать посредством дверных роликов. На фиг. 8 показаны нагрузки на ролики в зависимости от времени, причем, как показано, для предотвращения поворота двери должна быть создана сила в пределах между +72 и -4 кг. Следует отметить, что при изменении направления разгона на противоположное требуется вращающий момент противоположного направления. Отметим также, что один из роликов должен создавать отрицательную силу в течение большой части времени действия, причем отрицательная сила подразумевает, что создаваемая роликом сила должна отжимать дверь в направлении вниз.
На фиг. 9 показан профиль сил, необходимый при использовании жесткого крепления неподвижной части двигателя. Для получения этого профиля предполагали, что отношение нормальной силы к линейной равно 5,0 и что неподвижная часть линейного двигателя расположена на расстоянии 304,6 мм от центра тяжести двери, находящейся в исходном положении. Необходимый диапазон сил для переднего (набегающего) ролика (F1) составляет от -25 до +15 кг, а для заднего (сбегающего) ролика (F2) - от -5 до -40 кг. Предполагается, что на участке постоянной скорости создается известная нормальная сила. Отметим, что на большей части траектории требуемые силы отрицательны, что показывает, что дверь была приподнята под действием нормальной силы. Чем меньше сила, действующая на ролики, тем ниже уровень создаваемого шума.
Убедившись в полном устранении вращающих моментов на обоих концах хода двери при рассмотрении фиг. 7, остается теперь проверить, имеет ли место устранение вращающих моментов на остальной части хода. Предположим, что нормальная сила постоянна на протяжении всего хода двери, при этом создаваемый вращающий момент изменяется в зависимости от изменения плеча нормальной силы, вызываемого движением двери. Когда неподвижная часть двигателя установлена над краем двери и ход двери равен ее ширине, вращающий момент, создаваемый нормальной силой, изменяется линейно с изменением положения двери, причем он равен нулю, когда дверь находится точно в середине хода, и достигает максимального значения (хотя и разным знаком) на каждом конце хода.
В соответствии с настоящим изобретением профиль сил для приведения двери в движение должен обеспечивать линейное изменение вращающего момента, создаваемого силой Fлинейная, которое точно уравновешивает вращающий момент, создаваемый силой Fнорма льная. Этот особый профиль сил представляет линейное изменение силы с изменением расстояния, при котором эта сила имеет максимальную величину на концах хода и равна нулю в средней точке хода.
Таким образом, особый профиль сил в соответствии с настоящим изобретением можно описать математически, как
Fлинейная = Fлинейнаямакс. • (1 - (2•X/D)),
где
Fлинейнаямакс. - максимальное значение силы Fлинейная, заданное в соответствии с требуемым ускорением;
X - текущее положение двери;
D - конечное требуемое положение двери.
Этот профиль сил симметричен, имеет максимальное положительное значение в исходном состоянии (X=0) и максимальное отрицательное значение в конечном состоянии (X=D) и доходит до нуля в средней точке хода (X=D/2). Это показано на фиг. 12.
На фиг. 12 показан также сплошными линиями стандартный профиль сил, обычно используемый для дверей с машинным приводом. Этот обычно используемый профиль сил имеет перегибы, причем максимальную силу прилагают на первый половине хода, а максимальную отрицательную силу - на конечной части хода. Использование этого профиля сил дает в результате треугольный профиль скоростей, показанный сплошной линией на фиг. 13. Острый пик этого профиля скоростей способствовал шуму и неровному движению двери в прототипе. Наоборот, обеспечивающий уравновешивание вращающих моментов профиль сил, показанный пунктирными линиями на фиг. 12, дает профиль скоростей, имеющий сглаженный пик, как показано на фиг. 13.
Итак, резюмируя, можно сказать, что сила Fлинейная, приводящая дверь в движение, создает вращающий момент относительно центра тяжести двери, который изменяется линейно с изменением положения двери вследствие изменения силы Fлинейная, как описано в данном описании. Сила притяжения Fнорма льная создает вращающий момент, действующий в направлении, противоположном направлению действия вращающего момента, создаваемого силой Fлинейная, и тоже изменяющийся линейно с изменением положения двери вследствие изменения плеча. Подбирая надлежащее значение силы Fнорма льная и ускорение A двери, можно обеспечить полное уравновешивание вращающих моментов во всех точках хода двери.
Как уже было сказано, главной идеей настоящего изобретения является изменение силы действия магнитного поля по длине хода двери для обеспечения противодействия всему или части вращающего момента, создаваемого при приведении в движение дверей не в центре тяжести. Это распределение сил, противодействующих вращающему моменту, может быть создано, как показано на фиг. 10, если сделать произведение плеча Xсд на силу Fнорма льная равным произведению плеча Yсд на силу Fлинейная на протяжении всего хода двери. Это та же самая идея, которая уже была описана в связи с фиг. 7. Поскольку плечо Xсд представляет собой горизонтальное расстояния между центром тяжести двери и неподвижной частью двигателя и поскольку такое горизонтальное расстояние изменяется в зависимости от положения двери, то в соответствии с настоящим изобретением нужно брать это изменяющее по длине плечо в расчет при вычислении величины линейной силы (Fлинейная), прилагаемой к двери в горизонтальном направлении при движении двери. Для удовлетворения уравнения, показанного на фиг. 10, т.е.
Fнорма льная • Xсд = Fлинейная • Yсд
на всем протяжении работы двери, необходимо (поскольку горизонтальное плечо Xсд изменяется в соответствии с положением двери), чтобы горизонтальная линейная сила (Fлинейная) также изменялась пропорциональным образом, чтобы сохранить равенство частей упомянутого уравнения. Это обеспечивает устранение вращающих моментов, которые бы в противном случае имели место.
Это распределение сил, которое противодействует вращающему моменту, может быть обеспечено следующими средствами:
A. Набором алгоритмов, заложенных в виде программы в компьютерную систему 50 (фиг. 4) управления или подобную систему, которая определяет горизонтальную силу, прилагаемую к двери в любой момент (после команды на открывание или закрывание двери) и вычисляет соответственно необходимый корректирующий вращающий момент. Это требует, чтобы заранее запрограммированная информация, по существу, представляла модулирование всей системы посредством компьютерной системы управления (или подобной системы управления), что обеспечивает регулирование сил по разомкнутому циклу.
B. Изменением силы и/или положения, ускорения или скорости двери и подачей этой информации обратно в компьютерную систему 50 управления (или подобную систему управления) в системе с замкнутым контуром, которая использует воспринятую информацию для сравнения с вырабатываемой от профиля командной для вычисления необходимого корректирующего вращающего момента в любой момент.
Вследствие того, что нормальная сила остается постоянной, но имеет переменное плечо в соответствии с описанным выше вариантом, а линейная сила имеет постоянное плечо, но сама изменяется, как показано на фиг. 10, профиль сил, показанный пунктирной линией на фиг. 12, может в соответствии с настоящим изобретением изменяться линейно с изменением местоположения двери, обеспечивая тем самым устранение вращающего момента на протяжении всего хода двери, как показано на фиг. 11. Из фиг. 12 понятно, что для обеспечения такого же времени работы, какой получают в прототипе, показанном на фиг. 1, максимальная сила для профиля при использовании линейного двигателя (пунктирная линия) должна быть несколько больше, чем для профиля с постоянной силой (сплошная линия) в прототипе.
Аналогичным образом, как показано на фиг. 13, профиль скоростей (пунктирная линия) при использовании линейной силы, показанной на фиг. 12, может быть выбран, как показано, намного более плавным, чем показанный сплошной линией профиль при использовании профиля с постоянной силой (фиг. 12) в прототипе.
Уравнение для кривой скоростей, показанной на фиг. 13 пунктирной линией и обусловленной профилем линейной силы (фиг. 12), может быть представлено следующим образом:
где
a - ускорение двери;
xт - полное расстояние, покрываемое при открывании или закрывании двери;
x - данное положение при изменении с увеличением в плюс или минус выбранной нулевой точки в пределах полного расстояния xт.
Как было сказано выше, дополнительной особенностью настоящего изобретения является обеспечение полного или частичного противодействия гравитационной силе, действующей на дверную систему, путем использования магнитных сил отталкивания или притяжения, создаваемых линейным двигателем, таких, как описаны выше.
Шины стандартным дверных роликов сжимаются под действием массы нормальных дверей приблизительно но 0,25 мм. Если дверь поднять на 0,10 мм, нагрузка на дверные ролики уменьшится примерно на 60 процентов массы двери. Нормальная составляющая сил в линейном двигателе создает силу, уравновешивающую дверь, причем уровень нормальных сил регулируют путем регулировки зазора между неподвижной и подвижной частями линейного двигателя.
Часть массы двери, действующая на дверные ролики, связана, таким образом, с требуемым горизонтальным ускорением двери. Следовательно, необходимость наличия уравновешивающей вращающие моменты нормальной силы позволяет иметь дверь с частичным магнитным подвешиванием.
Зазор в двигателе показан на фиг. 14. Данными заявителями было обнаружено, что уравновешенное ускорение является чувствительной буферной функцией начального зазора, как показано на фиг. 15, где представлен зазор для полного устранения вращающих моментов как функция ускорения. Эти данные получены в результате экспериментов с масштабной моделью дверной системы лифта.
Было осуществлено плоскостное с 3 степенями свободы динамическое моделирование дверной системы, о которой идет речь, и результаты были использованы для разработки теории и реализации настоящего изобретения.
На фиг. 16 показаны результаты моделирования в отношении вертикального положения и поворота двери, на фиг. 17 показано движение двери, на фиг. 18 показаны создаваемые в линейном двигателе силы, описанные ранее в связи с фиг. 10, и на фиг. 19 показаны описанные выше силы, действующие на ролики двери.
На фиг. 16 показано, что действующие на дверь вращающие моменты уравновешены (поворот равен нулю) и что дверь слегка приподнята (приблизительно 0,03 мм), в данном случае посредством нормальной силы. Этот подъем соответствует уменьшению действия массы на дверные ролики вследствие наличия нормальной силы в линейном двигателе. Разумеется, величина подъема двери является функцией жесткости роликов, массы двери и заданного ускорения.
Показанные на фиг. 17 кривые ускорения, скорости и положения соответствуют описанному ранее профилю
F = Fмакс. (1-2X/D)
при
Fмакс., выбранном так, чтобы ускорение было равно 1,707 мм/сек2. Следует отметить, что эти профили (эпюры) показаны на фиг. 17 как функция времени, а не расстояния, как описано ранее. На фиг. 18 показаны силы Fнорма льная и Fлинейная, связанные с данным конкретным случаем.
Указанные детали конструкции, уровни сил и ускорения, скорости и положения достаточны для того, чтобы позволить любому специалисту в данной области техники воспроизвести аналитические и экспериментальные исследования, легшие в основу описанного здесь изобретения.
Настоящее изобретение было описано и проиллюстрировано в наилучшем варианте его осуществления, но понятно для специалистов в данной области техники, что возможны различные изменения, изъятия и дополнения, не выходящие за пределы существа и объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СОЕДИНЕНИЯ КАБИННОЙ И ШАХТНОЙ ДВЕРЕЙ ЛИФТА | 1995 |
|
RU2107653C1 |
| УЗЕЛ КАБИНЫ ЛИФТА (ВАРИАНТЫ) | 1995 |
|
RU2103219C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ШАХТНОЙ ДВЕРИ С ДВЕРЬЮ КАБИНЫ ЛИФТА ДЛЯ ИХ ОДНОВРЕМЕННОГО ПЕРЕМЕЩЕНИЯ (ВАРИАНТЫ) | 1995 |
|
RU2107017C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОКОМ РАЗОМКНУТОГО КОНТУРА ДЛЯ ОБМОТОК ЛИНЕЙНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2101225C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1992 |
|
RU2094354C1 |
| СИСТЕМА ПРИВОДА ДВЕРИ КАБИНЫ ЛИФТА | 1995 |
|
RU2084391C1 |
| СИСТЕМА ГИДРАВЛИЧЕСКОГО ПОДЪЕМНИКА | 1991 |
|
RU2018724C1 |
| СПОСОБ РЕГУЛИРОВКИ ДВЕРИ ЛИФТА | 1995 |
|
RU2144900C1 |
| КАБИНА ЛИФТА | 1989 |
|
RU2015100C1 |
| ПАНЕЛЬ УПРАВЛЕНИЯ КАБИНЫ ЛИФТА | 1993 |
|
RU2117591C1 |
Изобретение относится к технике приведения в действие дверей лифта. Задача - обеспечение управления дверью лифта с линейным электродвигателем при уменьшении до минимума нежелательных вращательных моментов. Линейный двигатель приводят в ответ на управляющий сигнал для противодействия вращающему моменту, вызываемому плечом переменной длины относительно центра тяжести двери, путем изменения величины, приложенной к двери линейной силы, действующей на плече постоянной длины относительно указанного центра тяжести. Этим создают противоположный вращающий момент и обеспечивают противодействие вращающему моменту, вызываемому нормальной силой. Первый и второй вращающие моменты могут регулироваться так, чтобы они уменьшались и увеличивались линейно во время движения двери. При этом профиль (эпюра) скорости изменяется по кривой, подобной части эллипса с одной стороны большой оси. Нормальная сила может быть создана таким образом, чтобы приподнимать дверь для уменьшения гравитационных сил, действующих на ролики двери. Регулирование может осуществляться по разомкнутому или замкнутому циклу. 2 с. и 14 з.п. ф-лы, 19 ил.

где a - ускорение двери;
xT - полное расстояние, покрываемое при открывании или закрывании двери;
x - промежуточное расстояние, на которое перемещается дверь от выбранного нулевого положения в любую сторону в пределах полного расстояния xT.
где a - ускорение двери;
xT - полное расстояние, покрываемое при открывании или закрывании двери;
x - промежуточное расстояние, на которое перемещается дверь от выбранного нулевого положения в любую сторону в пределах полного расстояния xT.
| US 4876765 A, 31.10.89 | |||
| US 4698876 A, 13.10.87 | |||
| Привод раздвижной двери кабины лифта | 1983 |
|
SU1177255A1 |
