Изобретение относится к технике измерения и регулирования плотности жидкости и касается измерителей и регуляторов, обеспечивающих автоматическое измерение и регулирование контролируемой жидкой среды.
Известны многочисленные методы измерения плотности жидкостей [1] и регулирования плотности жидких сред в тех условиях, когда на процесс измерения не оказывает существенного влияния вязкость контролируемой жидкости.
Их недостатком является то, что ими не представляется возможным осуществить комплексное измерение параметров жидкости.
Известен датчик ротационного измерителя плотности жидкости [2], с помощью которого значения плотности оценивается по изменениям угловой скорости вращения ротора внутри отдельных периодов вращения разбалансированного зонда. Одновременно контролируется и вязкость жидкости.
Недостатком известного устройства является ограниченность его функциональных возможностей, поскольку в процессе измерения внешнее устройство должно управлять экспериментом измерения, а также осуществлять математическую обработку принятой информации по достаточно сложным математическим соотношениям. Датчик не может применяться непосредственно для управления плотностью контролируемой жидкости.
Известны датчики, основанные на оценке плотности и вязкости контролируемой жидкости путем измерения параметров движения шаровых зондов под действием известных сил в соответствии с законом Стокса [3, 4].
К этому же типу датчиков относится наиболее близкое техническое решение - датчик [5] параметров жидкости, содержащий программное реле, зонд, зондопроводник, барабан, подпружиненный ролик, отметчик угла поворота и электродвигатель, вход которого соединен с первым выходом программного реле, причем вход и выход отметчика угла поворота подключены к второму выходу программного реле и первому выходу датчика соответственно. В датчик введены первый и второй грузы, трос, электромагнитная муфта и дополнительные зонд, зондопроводник, барабан, направляющий подпружиненный ролик, трос, электродвигатель, электромагнитная муфта, отметчик угла поворота, причем вход дополнительного электродвигателя соединен с первым выходом программного реле, вход и выход дополнительного отметчика угла поворота подключены к второму выходу программного реле и второму выходу датчика соответственно, входные и выходные оси электромагнитной муфты и дополнительной электромагнитной муфты кинематически связаны с осями электродвигателя и дополнительного электродвигателя, барабана и дополнительного барабана соответственно, первый и второй грузы с помощью троса и дополнительного троса закреплены на барабане и дополнительном барабане соответственно.
Однако недостатком известных датчиков является ограниченность их применимости, поскольку в процессе измерения внешнее устройство должно управлять процедурой измерения, а также осуществлять математическую обработку выдаваемой датчиками информации по достаточно сложным математическим соотношением, вследствие чего известные решения являются достаточно сложными.
Целью изобретения является упрощение устройства и, как следствие, расширение сферы его применимости.
На чертеже представлена структурная схема регулятора.
В состав регулятора входят командоаппарат 1, управляемый работой элементов регулятора и задающее ритм измерения, электродвигатель 2 первой и электродвигатель 3 второй измерительных групп, обеспечивающие приведение зондов в исходное состояние перед очередным циклом измерения, электромагнитная муфта 4 первой и электромагнитная муфта 5 второй измерительных групп, кинематически связывающие оси электродвигателей с валами барабанов 6 и 7 на время приведения зондов в исходное состояние, зонд 8 и зонд 9 первой и второй измерительных групп, воспринимающие воздействие контролируемой жидкости при измерении, тросовые передачи 10 и 11 первой и 12 и 13 второй измерительных групп, груз 14 и груз 15, первый датчик 16 угла поворота и второй датчик 17 угла поворота, фиксирующие соответственно погружение и всплытие зондов в цикле измерения, первый элемент НЕ 18 и второй элемент НЕ 19, инвертирующие выходные напряжения датчиков угла поворота, первый элемент И 20 и второй элемент И 21, формирующие управляющие напряжения в первой и третьей позициях регулятора.
Регулятор работает следующим образом.
Измерение плотности жидкости осуществляется циклически, причем в каждом цикле имеется несколько стадий измерения. В каждом цикле измерения, если плотность жидкости превосходит установленное значение, появляется управляющее напряжение на первом выходе регулятора. Если плотность жидкости меньше установленного значения, то управляющее напряжение подается на второй выход регулятора.
Стадия приведенная зондов в исходное состояние перед измерением начинается с перехода командоаппарата 1 в первую позицию. При этом появляется напряжение на первом выходе программного реле. Этим напряжением включаются в работу первый электродвигатель 2, второй электродвигатель 3, первая электромагнитная муфта 4 и вторая электромагнитная муфта 5. Срабатывая, электромагнитные муфты соединяют вращающиеся оси электродвигателей соответственно с валами первого барабана 6 и второго барабана 7. Вращение валов барабанов приводит к подъему первого зонда 8 и второго груза 15 при одновременном опускании второго зонда 8 и первого груза 14. Этот процесс продолжается до тех пор, пока первый зонд 8 не окажется поднятым на достаточную высоту, а второй зонд 9 - опущенным на достаточную глубину в жидкость.
Стадия рабочих движений зондов начинается после перехода командоаппарата 1 во вторую позицию. При этом снимается напряжение с его первого выхода и появляется напряжение на втором выходе командоаппарата 1. Электромагнитные муфты отсоединяют оси электродвигателей от валов барабанов, дальнейшее поведение которых в регуляторе зависит от значения плотности контролируемой жидкости.
В том случае, когда текущее значение плотности жидкости соответствует зоне нечувствительности регулятора, валы барабанов начинают вращаться под действием весов соответственно первого зонда 8 и второго гpуза 15, скорость движения которых снижается соответственно первым грузом 14 и вторым зондом 9. Поскольку зонды движутся в контролируемой жидкости, она также оказывает влияние на скорость их движения. Однако в рассматриваемом случае через какой-то промежуток времени оба зонда достигают соответственно нижнее и верхнее граничные положения. При этом срабатывают первый датчик 16 угла поворота и второй датчик 17 угла поворота. На их выходах появляются разрешающие потенциалы, которые после инвертирования первым элементом НЕ 18 и вторым элементом НЕ 19 в виде запрещающих потенциалов подаются на вторые входы первого элемента И 20 и второго элемента И 21, запирая их. Поэтому, когда через требуемый промежуток времени командоаппарат 1 переходит в третью позицию и напряжение выдается на его второй и третий выходы, напряжение третьего выхода, поступая на первые входы первого элемента И 20 и второго элемента И 21, на их выходы не проходит. Поэтому в рассматриваемом режиме напряжения отсутствуют и на первом, и на втором выходах регулятора.
В том случае, когда плотность жидкости превышает граничное значение, первый зонд 8 не погружается в контролируемую жидкость и поэтому не достигнет нижнего граничного положения. Первый датчик 16 угла поворота в этом режиме не срабатывает, на его выходе остается запрещающий потенциал. Он инвертируется в разрешающий потенциал первым элементом НЕ 18, который подводится к второму входу первого элемента И 20. Поэтому как только командоаппарат 1 переходит в третью позицию и напряжения выдаются на его второй и третий выходы при подаче напряжения третьего выхода командоаппарата 1 на первый вход первого элемента И 20, это напряжение выдается на первый выход регулятора. Второй зонд 9 и связанные с ним элементы регулятора работают так же, как и в ранее рассматриваемом режиме, а поэтому напряжение на втором выходе регулятора отсутствует.
И, наконец, если плотность жидкости оказывается меньше второго граничного значения, второй зонд 9 не всплывает в контролируемой жидкости и не достигает верхнего граничного положения, второй датчик 17 угла поворота в этом режиме не срабатывает, на его выходе останется запрещающий потенциал. Он инвертируется в разрешающий потенциал вторым элементом НЕ 19, после чего подается на второй вход второго элемента И 21. Поэтому, когда командоаппарат 1 переходит в третью позицию и напряжение его третьего выхода прикладывается к первому входу второго элемента И 21, на выходе этого элемента появляется разрешающий потенциал, который передается на второй выход регулятора. Погружение первого зонда 8 в этом режиме приводит к срабатыванию первого датчика 16 угла поворота, а поэтому управляющее напряжение на первый выход регулятора не подается.
Математически сущность работы трехпозиционного регулятора плотности жидкостей поясняется следующим образом.
Динамика движения зондов в контролируемой жидкости характеризуется следующими уравнениями:  R3(ρз-ρж)·g-P1=6πRηV1; P2 -
R3(ρз-ρж)·g-P1=6πRηV1; P2 -  R3(ρз-ρж)·g= 6πRηV2, где R - радиус первого шарового зонда 8 и второго шарового зонда 9;
R3(ρз-ρж)·g= 6πRηV2, где R - радиус первого шарового зонда 8 и второго шарового зонда 9;
ρ з- плотности материала зондов;
ρж - текущее значение плотности контролируемой жидкости;
P1 - вес первого груза 14;
P2 - вес второго груза 15;
η - вязкость контролируемой жидкости;
V1 - скорость первого шарового зонда 8;
V2 - скорость второго шарового зонда 9.
Если пренебречь силами трения, то первый зонд 8 не погружается в жидкость, начиная с граничного значения плотности жидкости, определяемого из соотношения R3(ρз-
R3(ρз- )·g-P1=0.
)·g-P1=0.
Аналогично второй зонд 9 не всплывает в жидкости, начиная с граничного значения плотности жидкости, определяемого из соотношения
P2 -  R3(ρз-
R3(ρз- )·g=0.
)·g=0.
Установка граничных значений зоны нечувствительности трехпозиционного регулятора плотности жидкостей поэтому может осуществляться изменением весов грузов. Их значения могут быть рассчитаны по следующим формулам:
P1=  R3(ρз-
R3(ρз- )·g;
)·g;
P2=  R3(ρз-ρ″ж)·g.
R3(ρз-ρ″ж)·g.
Моменты трения в подшипниках вала первого барабана 6 и вала второго барабана 7 должны учитываться при настройке регулятора дополнительным изменением весов первого груза 14 и второго груза 15.
Как следует из приведенного описания, в предлагаемом регуляторе полностью достигается цель изобретения. Видоизменение структурной схемы и введение новых элементов в состав регулятора обеспечивают ему существенное расширение области применимости: во-первых, регулятор автономно измеряет принадлежность текущего значения плотности контролируемой жидкости одной из трех зон, классифицируемых регулятором, и, во-вторых, выдает напряжения, которые могут быть использованы для трехпозиционного регулирования плотности жидкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР ПЛОТНОСТИ ЖИДКОСТЕЙ | 1990 |
|
RU2024909C1 |
| Датчик параметров жидкости | 1986 |
|
SU1408301A1 |
| Измеритель плотности жидкостей | 1990 |
|
SU1805333A1 |
| Измеритель вязкости жидкости | 1988 |
|
SU1627918A2 |
| Измеритель плотности жидкостей | 1988 |
|
SU1670531A2 |
| Датчик параметров жидкости | 1980 |
|
SU1052933A1 |
| Датчик параметров жидкости | 1983 |
|
SU1124200A2 |
| Устройство для определения готовности шлихты | 1989 |
|
SU1654727A1 |
| Датчик ротационного измерителя вязкости жидкостей | 1984 |
|
SU1267209A1 |
| ИЗМЕРИТЕЛЬ УРОВНЯ ЖИДКОСТИ И УРОВНЯ ПЕНЫ НАД ЕЕ ПОВЕРХНОСТЬЮ | 1993 |
|
RU2054632C1 |
Изобретение относится к технике измерения и регулирования плотности жидкости и касается измерителей и регуляторов, обеспечивающих автоматическое измерение и регулирование контролируемой жидкой среды. Цель изобретения - упрощение регулятора с одновременным расширением области применения. Сущность изобретения состоит в том, что регулятор содержит командоаппарат 1, первую и вторую измерительные группы, включающие в себя соответственно электродвигатель 2,3, электромагнитную муфту 4,5, барабан 6,7, зонд 8,9, тросовую передачу 10, 11 и 12,13, груз 14, 15, датчик 16, 17 угла поворота, элемент НЕ 18, 19 и элемент И 20, 21. 1 ил.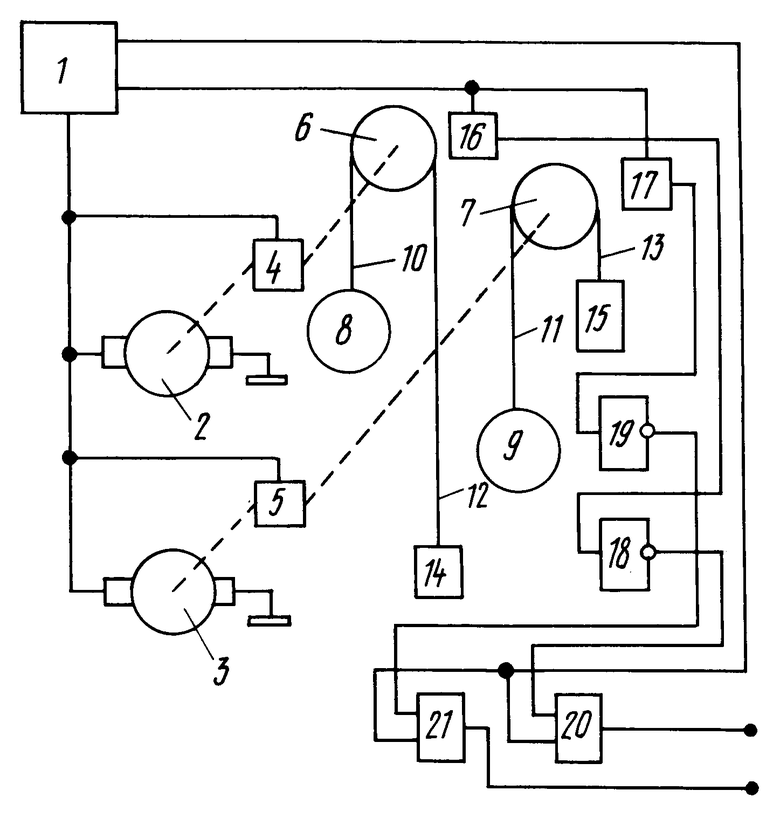
ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР ПЛОТНОСТИ ЖИДКОСТЕЙ, содержащий командоаппарат и две измерительные группы, каждая из которых содержит кинематически последовательно соединенные электродвигатель, электромагнитную муфту и барабан с кинематически связанными с ним зондом и грузом, а также датчик угла поворота барабана, причем входы включения и отпускания поворота электродвигателей и входы питания датчиков углов поворотов барабанов соединены соответственно с первым и вторым выходами командоаппарата, отличающийся тем, что, с целью упрощения регулятора, в каждую измерительную группу введены последовательно соединенные элемент НЕ и элемент И, причем вторые входы элементов И объединены и соединены с третьим выходом командоаппарата, выходы элементов И являются выходами регулятора, вход каждого элемента НЕ соединен с выходом датчика угла поворота барабана своей группы, а соответствующий зонд и груз закреплены на концах тросовой передачи, размещенной на барабане.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Датчик параметров жидкости | 1986 |
|
SU1408301A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
