Изобретение относится к технике измерения вязкости и плотности жидкости и касается измерителей, обеспечивающих автоматическое измерение вязкости и плотности контролируемой жидкой среды.
Целью изобретения является распги- рение функциональных возможностей датчика за счет дополнительного измерения плотности жидкости и повышения точности измерений.
На чертеже изображена структурная схема датчика.
В состав датчика входят нрограм- мное реле 1, управляющее работой элементов датчика и задающее ритм измерения, первый 2 и второй 3 зонды, воспринимающие воздействие жидкости и являющиеся чувствительными алемен- тами Датчика, первый 4 и второй 5 зондопроводники, на которых крепятся первый и второй зонды и которые обеспечивают движение зондов по заданным траекториям, первый б и второй 7 направляющие ролики, направляющие движение зондопроводников, первая 8 и вторая 9 пружины, смещая направляющие ролики, обеспечивающие требуемое на- тяжение зондопроводников, первый груз 10, снижающий скорость движения опускающего первого зонда 2, второй груз 11 , обеспечивающий подъем второ- го зонда 3 в цикле измерения, первый 12 и второй 13 тросы, на которых крепятся грузы, первый 14 и второй 15 барабаны, направляющие движение зондопроводников и передающие воздействие грузов на зонды, первая 16 и вторая 17 электромагнитные муфты, кине- матически связывающие оси первого 14 и второго 15 барабанов соответствен- н6 с валами первого 18 и второго 19 электродвигателей, обеспечивающих приведение зондов в исходное положе- ние перед очередным циклом измерения первый 20 и второй 21 отметчики угла поворота, вьщающие импульсные сигналы на соответствующие выходы датчика при повороте контролируемых барабанов на заданные углы.
Элементы датчика взаимодействуют следующим образом.
Первый выход программного реле 1 подключен к первому 18 и второму 19 электродвигателям и первой 16 и второй 17 электромагнитным муфтам, а второй выход соединен с входами первого 20 и второго 2 отметчиков уг
-
5 0 5 0 s 0 .
0
5
ла поворота. Первый зонд 2 закреплен на первом зондопроводнике 4, ог ибаю- щем первый барабан 14 и первьш направляющий ролик 6. Второй зонд 3 закреплен на зондопроводнике 5, огибающем второй барабан 15 и второй направляющий ролик 7. Первая пружина 8, смещая подвижный первый направляющий ролик 6, обеспечивает требуемое натяжение зондопроводника 4. Вторая пружина 9, смещая подвижный второй направляющий . ролик 7, задает требуемое натяжение второго зондопроводника 5. Первый груз 10 с помощью первого троса 12 закреплен на первом барабане 14. Второй груз II с помощью второго троса 13 закреплен на втором барабане 15. Входная ось первой электромагнитной муфты 16 кинематически связана с валом первого электродвигателя 18, а выходная ось - с валом первого барабана 14. Входная ось второй электромагнитной муфты 17 кинематически связана с валом второго электродвигателя 19, а выходная ось - с валом второго барабана 15. Первый отметчик 20 угла поворота, выход которого подключен к первому выходу датчика, контролирует вращение вала первого барабана 14. Второй отметчик 21 угла поворота, выход которого соединен с вторым выходом датчика, контролирует вращение вала второго барабана 1 5 .
Датчик работает следующим образом.
После включения датчика в работу программное реле 1 через заданные промежутки времени последовательно переходит в одну из трех возможных позиций.
В первой позиции осуществляется подготовка датчика к очередному циклу измерения.Появляющееся напряжение на первом выходе программного реле 1 включает в.работу первый 18 и второй 19 электродвигатели, первую 16 и вторую 17 электромагнитные муфты. Срабатывающие первая электромагнитная муфта 16 кинематически связывает первый электродвигатель 18с первым барабаном 14, а вторая электромагнитная муфта 17 - второй электродвигатель 19 с вторьм барабаном 15. Под воздействием электродвигателей начинают вращаться валы барабанов, что приводит к подъему первого зонда 2 и опусканию второго зонда 3. Одновременно из-за наматывания на ба31 4
рабаны первого 12 и второго 13 тросов осуществляется опускание первого груза 10 и подъем второго груза 11.
Программное реле 1 находится в первой позиции промеягуток времени, достаточный длг. подъема первого зонда 2 и второго груза 1I на требуемую высоту и для опускания на необходимую высоту второго зонда 3 и первого груза 10. После этого оно переходит во вторую позицию. Напряжение с его первого выхода снимается. Появляется напряжение на его втором выходе. Первая 16 и вторая 17 электромагнитные I муфты 7 отсоединяют от электродвигателей первый 14 и второй 15 барабаны Напряжение с второго выхода программного реле 1 включает в работу первый 20 и второй 21 отметчики угла noBopoта.
После этого начинается непосредственно процесс измерения параметров жидкости. Первый зонд 2 под действием собственного веса начинает дви- гаться вниз. Первый груз 10 снижает скорость движения первого зонда 2, вес второго груза 11 выбирается большим веса второго зонда 3, поэтому поелед1шй начинает двигаться вверх с малой скоростью. Движение зондов сопровождается вращением первого 14 и второго 15 барабанов. При этом после каждого очередного поворота соответствующего барабана на заданный угол происходит срабатьшание первого 20 или второго 21 отметчика угла поворота. При этом отметчиками формируются импульсные -сигналы, вьщавае- мые на первый или второй выход датчика. С этих выходов сигналы принимаются вычислительной машиной, совместно с которой работает датчик. Ею с высокой точностью измеряются времена приема сигналов, коды которых, совместно с кодами выходов датчиков, вьщавших CJlгнaлы, записываются в специальных массивах памяти, г
По истечении промежутка времени, в течение которого зонды проходят требуемый участок траектории движения, программное реле 1 переходит в третью позицию, в которой находится до начала следующего цикла измерения. Напряжения на обоих выходах програм
JQ 5 Q
5 о .-. .-
5
0
Ш1
. много реле I в этом режиме отсутствуют.
Собранная ЭВМ в очередном цикле измерения информация позволяет оценить ускорения и скорость движения зондов. На основе полученных результатов затем рассчитываются искомые вязкость и плотность контролируемой жидкости. Методика расчета указанных параметров особенно проста, если в процессе движения зондов они переходят в режим равномерного движения.
Формула изобретения
Датчик параметров жидкости, содержащий программное реле, зонд, зондо- проводник, барабан, подпружиненный направляющий ролик, отметчик угла поворота и .электродвигатель, вход которого соединен с первым выходом программного реле, вход и выход отметчика угла поворота подключены к второму выходу программного реле и первому выходу датчика соответственно, отличающийся тем, что, с целью расширения функциональных возможностей датчика за счет дополнительного измерения плотности жидкости и повышения точности измерений, в него введены первый и второй грузы, трос, электромагнитная муфта и дополнительные зонд, зондопровод- ник, барабан, направляющий подпружиненный ролик, трос, электродвигатель, электромагнитная муфта, отметчик угла поворота, причем вход дополнительного электродвигателя соединен с первым выходом программного реле, вход и выход дополнительного отметчика угла поворота подключены к второму выходу программного реле и второму выходу датчика соответственно, входные и выходные оси электромагнитной муфты и дополнительной электромагнитной муфты кинематически связань с осями электродвигателя и дополнительного электродвигателя, барабана и дополнительного барабана соответственно, первый и второй грузы с помощью троса и дополнительного троса закреплены на барабане и дополнительном барабане соответственно.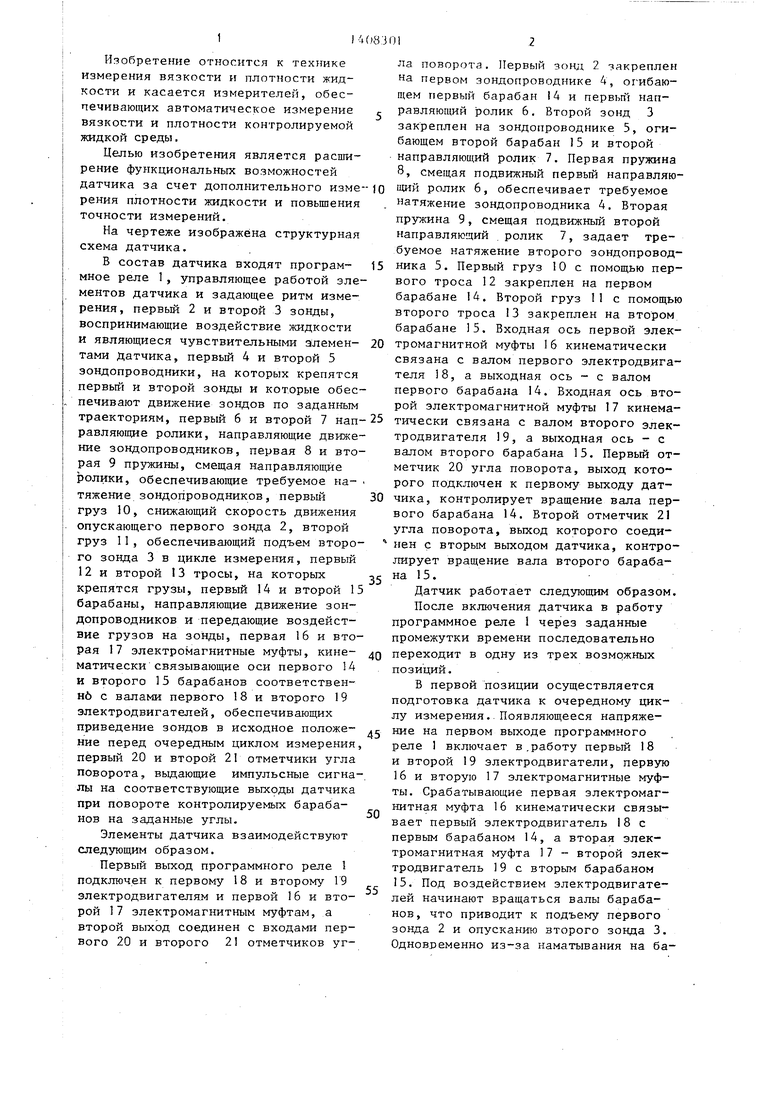
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР ПЛОТНОСТИ ЖИДКОСТЕЙ | 1990 |
|
RU2024909C1 |
| ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР ПЛОТНОСТИ ЖИДКОСТЕЙ | 1988 |
|
RU2022320C1 |
| Измеритель вязкости жидкости | 1988 |
|
SU1627918A2 |
| Измеритель плотности жидкостей | 1988 |
|
SU1670531A2 |
| Измеритель плотности жидкостей | 1990 |
|
SU1805333A1 |
| ИЗМЕРИТЕЛЬ УРОВНЯ ЖИДКОСТИ И УРОВНЯ ПЕНЫ НАД ЕЕ ПОВЕРХНОСТЬЮ | 1993 |
|
RU2054632C1 |
| Датчик параметров жидкости | 1983 |
|
SU1124200A2 |
| Датчик параметров жидкости | 1980 |
|
SU1052933A1 |
| Устройство для определения готовности шлихты | 1989 |
|
SU1654727A1 |
| Датчик ротационного измерителя вязкости жидкостей | 1984 |
|
SU1267209A1 |
Изобретение относится к технике измерения вязкости и плотности жидкостей и касается измерителей, обеспечивающих автоматическое измерение. Цель изобретения - расширение функциональных возможностей и повышение точности измерений. За счет снижения скоростей движения зондов достигается повышение метрологических характеристик измерительной схемы. Датчик содержит два зонда, один из которых погружается, а другой всплывает в цикле измерения. Для управления скоростями движения зондов в схему датчика ввели два груза. Датчик выдает сигналы о временах прохождения каждым из зондов заданных участков траектории движения. Вычислительная машина по этим промежуткам оценивает скорости и ускорения зондов, а затем рассчитывает искомые вязкость и плотность жидкости. 1 ил. с @
У
о
в 8
| Авторское свидетельство СССР № 10522933, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измеритель вязкости жидкости | 1986 |
|
SU1318846A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
