Изобретение относится к аналоговой вычислительной технике и может быть использовано в энергетике в системах оптимального управления энергетическими объектами с распределенными параметрами. Такие задачи известным методом сводятся к решению двух систем уравнений с частными производными с заданными краевыми условиями.
Известно устройство для моделирования двух систем дифференциальных уравнений с частными производными, содержащее две RC-сетки, блоки задания начальных и граничных условий и блок уравновешивания, связывающий между собой две RC-сетки [1].
Недостаток известного устройства заключается в том, что на нем можно моделировать только системы уравнений параболического типа.
Наиболее близким по технической сущности и достигаемому положительному эффекту к изобретению является устройство для решения задач оптимального управления, содержащее две RC-сетки, блок задания начальных условий и блок задания граничных условий, подключенные выходами соответственно к внутренним и граничным узлам RC-сеток, и блок задания наблюдения (блок задания конечных условий) [2].
Недостаток устройства заключается в том, что на нем невозможно моделировать сингулярные системы оптимальности, относящиеся к системам, уравнения состояний которых обладают особенностями, например разрывными решениями.
Цель изобретения заключается в расширении функциональных возможностей за счет моделирования сигнулярных систем оптимальности.
Цель достигается тем, что в устройстве для моделирования задач оптимального управления распределенными системами, содержащем блок задания наблюдения, первую и вторую RC-сетки, к внутренним и граничным узлам которых подключены выходами соответственно блок задания начальных и блок задания граничных условий, причем к шине нулевого потенциала и внутренним узлам второй RC-сетки входами и выходами подключены соответственно конденсаторы с отрицательными емкостями, и блок уравновешивания, каждый элемент последнего содержит первый и второй блоки возведения в степень, первый, второй и третий двухвходовые сумматоры, первый и второй блоки умножения, первый и второй управляемые источники тока, причем каждый внутренний узел первой RC-сетки подключен через первый блок возведения в степень к первому входу первого сумматора и непосредственно к двум входам первого блока умножения, выход которого подключен к первому входу второго блока умножения, и к первому входу второго сумматора, подключенного вторым входом к выходу блока задания наблюдения, а выходом к входу второго блока возведения в степень, выход которого подключен к первому входу третьего сумматора, подключенного вторым входом к выходу второго блока умножения, а выходом к управляющему входу первого управляемого источника тока, выход которого подключен к соответствующему внутреннему узлу второй RC-сетки, к второму входу второго управляемого источника тока, выход которого подключен к соответствующему внутреннему узлу первой RC-сетки.
Сравнение заявляемого технического решения с прототипом позволяет установить его соответствие критерию "новизна", так как оно содержит дополнительные конструктивные блоки и новые связи между элементами.
При изучении других известных технических решений в области аналоговой вычислительной техники признаки, отличающие изобретение от прототипа, не обнаружены, поэтому они обеспечивают техническому решению соответствие критерию "существенные отличия".
Схема устройства приведена на чертеже.
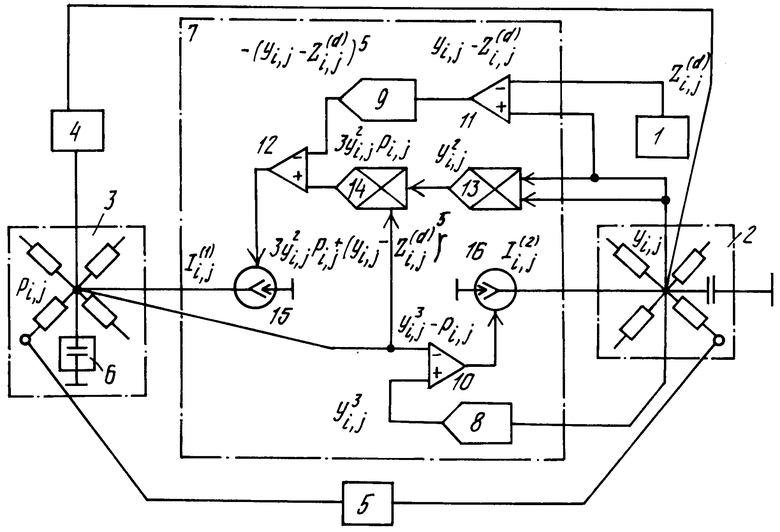
Устройство содержит блок 1 параметров состояния систем, первую RC-сетку 2, вторую RC-сетку 3, блок 4 задания начальных условий, блок 5 задания граничных условий, конденсатор 6 с отрицательными емкостями, узлы 7 уравновешивания, каждый из которых содержит блоки 8 и 9 возведения в степень, сумматоры 10, 11 и 12, блок 13 возведения в степень и блок 14 умножения, управляемые источники 15 и 16 тока. Каждый внутренний узел первой RC-сетки 2 подключен через блок 8 возведения в степень к первому входу сумматора 10 и непосредственно к входам блока 13, выход которого подключен к первому входу блока 14 умножения, и к первому входу сумматора 11, подключенного вторым входом к выходу блока 1, а выходом к входу блока 9 возведения в степень. Выход блока 9 подключен к первому входу сумматора 12, подключенного вторым входом к выходу блока 14 умножения, а выходом к управляющему входу управляемого источника 15 тока, выход которого подключен к соответствующему внутреннему узлу второй RC-сетки 3, второму входу блока 14 умножения и к второму входу сумматора 10. Выход последнего подключен к управляющему входу управляемого источника 16 тока, выход которого подключен к соответствующему внутреннему узлу первой RC-сетки 2, внутренние и граничные узлы которой вместе с внутренними и граничными узлами второй RС-сетки подключены соответственно к выходам блока 4 задания начальных условий и выходам блока 5 задания граничных условий.
Работает устройство следующим образом.
Настраивают управляемые источники 15 и 16 тока так, чтобы на их выходах вырабатывались токи Ii,j(1) и Ii,j(2) по заданному закону управления. Задают в узлах RC-сеток 2 и 3 с помощью блоков 4 и 5 задания начальных и граничных условий исходные данные в виде напряжений и токов и включают устройство в работу. Узловые напряжения yi,j первой RC-сетки 2 поступает через блок 8 возведения в степень на первый вход сумматора 10 и одновременно на входы блока 13 и на первый вход сумматора 11. Выходные напряжения сумматора 11 и блока 13 поступают на входы блока 9 возведения в степень и блока 14 умножения, а их выходные напряжения подаются на входы сумматора 12, выходное напряжение которого поступает на управляющий вход управляемого источника 15 тока, в котором вырабатывается ток Ii,j(1) по заданному закону управления. Этот ток поступает во внутренние узлы второй RC-сетки 3, в которых возникают напряжения Pi,j. Эти напряжения поступают на вторые входы блока 14 умножения и сумматора 10, выходное напряжение которого поступает на управляющий вход управляемого источника 16 тока, в котором вырабатывается ток Ii,j(2) по заданному закону управления. Этот ток поступает во внутренние узлы первой RС-сетки 2, в которых напряжения yi,j, изменяют свои значения. С помощью какого-либо устройства считывания информация с внутренних узлов первой RC-сетки 2 и второй RC-сетки 3 считывается и запоминается.
Поясним работу устройства на конкретном примере моделирования системы оптимальности для неустойчивой модельной задачи (3).
Для составления системы оптимальности относительно неустойчивой модельной задачи рассматривают множество допустимых пар управление - состояние, т.е. пар {v,z}, удовлетворяющих условиям
v∈ UadcL2(Q); z∈ L6(Q) (1) где Uad - непустое замкнутое множество; - ▿2z-z3=v в Q (2)
- ▿2z-z3=v в Q (2)
z(x,0)= yo(x) в Ω; yo∈ H (Ω) (3) где H
(Ω) (3) где H (Ω) - пространство Соболева .
(Ω) - пространство Соболева .
Предполагается, что множество допустимых управлений - состояний непусто для функции стоимости
J(v,z) =  z-z
z-z +
+ 
 v
v  ; N>0 (4)
; N>0 (4)
Тогда сингулярная система оптимальности для задачи (1) и (4) имеет вид - ▿2y-y3=U
- ▿2y-y3=U
-  - ▿2p-3y2p=(y-z(d))5 в Q=Ω×(0,T) (5)
- ▿2p-3y2p=(y-z(d))5 в Q=Ω×(0,T) (5)
y = p = 0 на Σ = Г (0,Т); Т > 0;
y(x,0) = yo(x); p(x,T) = 0 на Ω сRn, где Г - граница области определения уравнения (2);
z(d) - заданное наблюдение,
y∈H2,1(Q); p∈W2,1;6/5(Q) (6) (p+Nn)(u-U)dxdt≥ 0; ∀v∈Uad (7)
(p+Nn)(u-U)dxdt≥ 0; ∀v∈Uad (7)
Для упрощения предполагают, что вместо условия (1) имеет место
v∈Uad=L2(Q) (8)
Тогда условие (7) преобразуется в равенство
p + Nn = 0. (9)
Пусть, кроме того, n=2. Тогда система уравнений (5) имеет вид -
-  +
+  =y3-
=y3-  p (10)
p (10)
-  -
-  +
+  =3y2p+
=3y2p+ y-z
y-z (11) с начальными
(11) с начальными
y(x,o) = yo(x); p(x,T) = 0(12) и граничными условиями
y = p = o на Σ (13)
Подставив в уравнение (10)
Δx1 = h1; Δ x2 = h2, согласно методу конечных разностей получают
h1h -
-  yi+1,j-2yi,j+y
yi+1,j-2yi,j+y -
-  yi,j+1-2yi,j+y
yi,j+1-2yi,j+y =
=
=h1h y
y P
P
-h1h -
-  Pi+1,j-2Pi,j+P
Pi+1,j-2Pi,j+P

 Pi,j+1-2Pi,j+P
Pi,j+1-2Pi,j+P =
=
h1h 3y
3y yi,j-z
yi,j-z
Положив в RС-сетках 2 и 3
I y
y P
P ; R
; R
R ; c
; c
Ii,j(1) = h1h2[3yi,j2 pi,j + (yi,j - zi,j(d))5];
R ; R
; R ;
;  c
c =h1h2 видят, что при соответствующих начальных (12) и граничных (13) условиях на предложенном устройстве действительно моделируется сингулярная система оптимальности относительно неустойчивой модельной задачи (1)-(4), что и требовалось показать.
=h1h2 видят, что при соответствующих начальных (12) и граничных (13) условиях на предложенном устройстве действительно моделируется сингулярная система оптимальности относительно неустойчивой модельной задачи (1)-(4), что и требовалось показать.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ИЗГИБНЫХ КОЛЕБАНИЙ БАЛОК | 1988 |
|
RU2022361C1 |
| Устройство для решения задач тепломассопереноса | 1983 |
|
SU1159041A1 |
| Устройство для решения нелинейных задач теории поля | 1985 |
|
SU1357982A1 |
| Устройство для моделирования нелинейных краевых задач | 1988 |
|
SU1597885A1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ТРЕХМЕРНЫХ ЗАДАЧ МАТЕМАТИЧЕСКОЙ ФИЗИКИ | 1991 |
|
RU2051411C1 |
| Устройство для моделирования нелинейных граничных условий | 1980 |
|
SU902032A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Устройство для решения задач теплопроводности | 1980 |
|
SU898458A1 |
| Способ автоматического регулирования горения пылеугольного топлива и устройство для его осуществления | 1988 |
|
SU1588995A1 |
| Устройство для моделирования процесса теплообмена | 1977 |
|
SU691886A1 |
Изобретение относится к аналоговой вычислительной технике и может быть использовано в системах оптимального управления объектами с распределительными параметрами. Цель изобретения - расширение функциональных возможностей за счет воспроизведения управления сингулярными системами. Устройство содержит две RC-сетки, блок задания параметров состояния системы, являющийся блоком задания наблюдения, блок задания начальных условий, блок задания граничных условий, причем конденсаторы в одной из сеток выполнены с отрицательными емкостями, узлы уравновешивания, состоящие из двух управляемых источников тока, трех сумматоров, трех блоков возведения в степень и блока умножения. 1 ил.
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ РАСПРЕДЕЛЕННЫМИ СИСТЕМАМИ, содержащее две RC-сетки, блок задания начальных условий, блок задания граничных условий и узлы уравновешивания, причем выходы блока задания начальных условий соединены с узловыми точками первой RC-сетки, выходы блока задания граничных условий подключены к узловым точкам второй RC-сетки, отличающееся тем, что, с целью расширения функциональных возможностей путем воспроизведения управления сингулярными системами, в него введен блок задания параметров состояния систем, каждый узел уравновешивания состоит из двух управляемых источников тока, трех сумматоров, трех блоков возведения в степень и блока умножения, в первой RC-сетке конденсаторы выполнены с отрицательными емкостями, причем выходы блока задания начальных условий соединены с узловыми точками второй RC-сетки, выходы блока задания граничных условий подключены к узловым точкам первой RC-сетки, выходы блока задания параметров состояния систем соединены с первыми входами первых сумматоров узлов уравновешивания, в каждом узле уравновешивания выход первого сумматора через первый слой возведения в степень соединен с первым входом второго сумматора, выход которого подключен по входу задания режима первого управляемого источника тока, выход второго блока возведения в степень соединен с первым входом третьего сумматора, выход которого подключен к входу управления режимом второго управляемого источника тока, выход третьего блока возведения в степень соединен с первым входом блока умножения, выход которого подключен к второму входу второго сумматора, узловые точки первой RC-сетки соединены с выходами первых управляемых источников тока и вторыми входами третьих сумматоров и блоков умножения соответствующих узлов уравновешивания, узловые точки второй RC-сетки подключены к входам вторых и третьих блоков возведения в степень, к вторым входам первых сумматоров соответствующих узлов уравновешивания.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для решения задач оптимального управления | 1979 |
|
SU785877A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
