Изобретение относится к аналоговой вычислительной технике и может быть использовано для моделирования задач гидроупругости, возникающих при проектировании узлов гидросооружений, резервуаров для хранения нефти и других жидкостей.
Известно устройство для моделирования изгибных колебаний балок, содержащее L-сетку, катушки индуктивностей, трансформаторы и конденсаторы [1] .
Недостаток известного устройства заключается в низкой точности получения решений задач гидроупругости, что обусловливается элементной базой его реализации.
Наиболее близким по технической сущности и достигаемому положительному эффекту к изобретению является устройство для моделирования линейных задач теории поля, содержащее блоки задания граничных и начальных условий, подключенные выходами соответственно к граничным узлам R-сетки и конденсаторам дифференциаторов, блок уравновешивания, выполненный в виде электронного блока нелинейностей, и управляемые источники тока [2]. Указанное устройство выбрано в качестве прототипа.
Недостаток устройства заключается в том, что его невозможно использовать для моделирования изгибных колебаний балок, описываемых системой гиперболических и эллиптических уравнений, так как оно предназначено для моделирования только уравнений эллиптического либо гиперболического типа.
Цель изобретения заключается в расширении функциональных возможностей устройства за счет моделирования изгибных колебаний балок в жидкости. Кроме того, по сравнению с известными решениями повышается его точность.
Цель достигается тем, что устройство для моделирования изгибных колебаний балок, содержащее блоки задания граничных и начальных условий, подключенные выходами соответственно к граничным узлам R-сетки и конденсаторам дифференциаторов, блок уравновешивания и управляемые источники тока, снабжено первой и второй R-цепочками, в узлы которых подключены выходами соответственно первый и второй комплекты управляемых источников тока и блок задания граничных условий, причем каждый элемент блока уравновешивания выполнен в виде двухвходового сумматора, подключенного первым входом через катодный повторитель к соответствующему узлу R-сетки, а вторым входом через последовательно соединенные катодный повторитель, первый и второй дифференциаторы к соответствующему узлу первой R-цепочки, выход двухвходового сумматора подключен к соответствующему управляющему входу второго комплекта управляемых источников тока, выходы которых подключены к управляющим входам первого комплекта управляемых источников тока.
Сравнение заявляемого технического решения с прототипом позволяет установить его соответствие критерию "новизна", так как оно содержит дополнительные конструктивные блоки и новые связи между элементами.
При изучении других известных технических решений в области аналоговой вычислительной техники признаки, отличающие изобретение от прототипа, не обнаружены, поэтому они обеспечивают техническому решению соответствие критерию "существенные отличия".
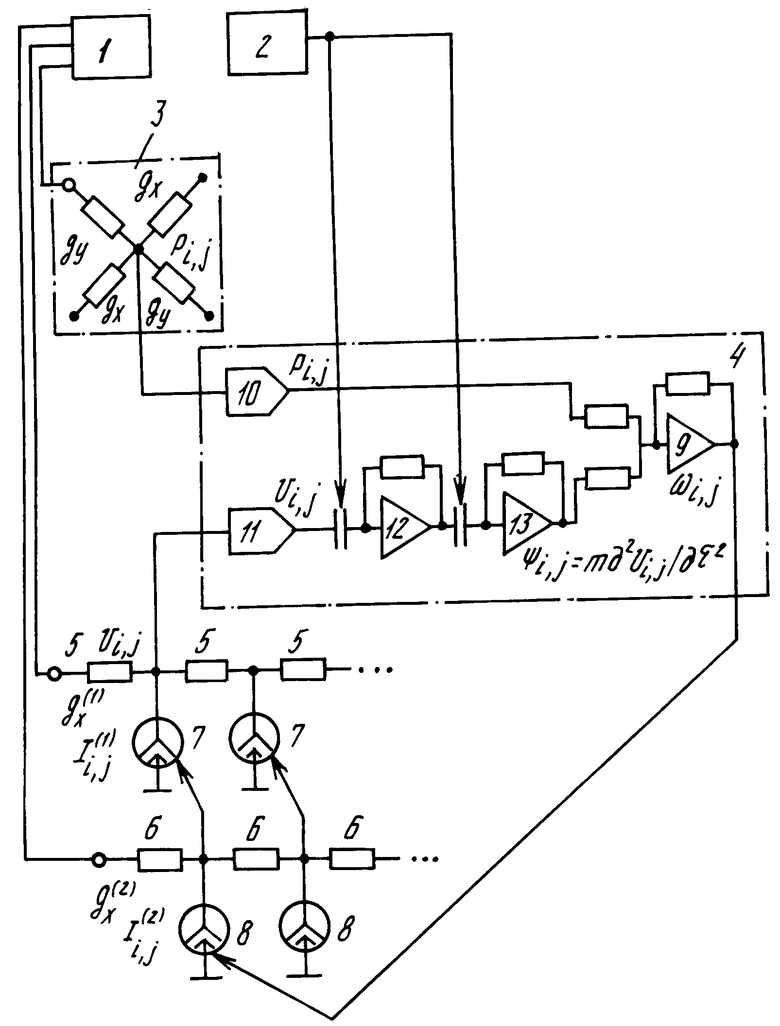
Схема устройства приведена на чертеже.
Устройство содержит блок 1 задания граничных условий, блок 2 задания начальных условий, R-сетку 3, блок 4 уравновешивания, первую R-цепочку 5 и вторую R-цепочку 6, первый комплект 7 и второй комплект 8 управляемых источников тока, подключенных входами соответственно к внутренним узлам первой R-цепочки 5 и второй R-цепочки 6, в граничные узлы которых подключен выходами блок 1 задания граничных условий. Блок 4 уравновешивания содержит двухвходовый сумматор 9, первый вход которого подключен через катодный повторитель 10 к соответствующему узлу R-сетки 3, к граничным узлам которой подключен выходами блок 1 задания граничных условий. Второй вход сумматора 9 подключен через последовательно соединенные катодный повторитель 11, первый дифференциатор 12 и второй дифференциатор 13, к конденсаторам которых подключен выходами блок 2 задания начальных условий, к внутренним узлам первой R-цепочки 5. Выход двухвходового сумматора 9, являющийся одним из выходов блока 4 уравновешивания, подключен к соответствующему управляющему входу второго комплекта 8 управляемых источников тока, выходы которых подключены к управляющим входам первого комплекта 7 управляемых источников тока.
Изгибные колебания балки в жидкости описывается следующей системой уравнений [1]: +
+  = 0 (1)
= 0 (1)
εJ + m
+ m +p= 0 (2) где p - гидродинамическое давление жидкости;
+p= 0 (2) где p - гидродинамическое давление жидкости;
ε - модуль упругости балки;
J - момент инерции;
U - прогиб балки;
m - погонная масса балки;
x, y - координаты;
τ - время.
Если в уравнения (1) и (2) ввести дополнительную переменную = v (3) и подставить ее в уравнение (2):
= v (3) и подставить ее в уравнение (2):
εJ + m
+ m +p= 0 (4) то получают систему уравнений (1), (3), (4) третьего порядка. Для упрощения начальные и граничные условия для уравнений (1) и (2) опускают, так как их вид для описания работы устройства не играет роли. Применив к уравнениям (1), (3) и (4) метод конечных разностей, получают систему алгебраических уравнений
+p= 0 (4) то получают систему уравнений (1), (3), (4) третьего порядка. Для упрощения начальные и граничные условия для уравнений (1) и (2) опускают, так как их вид для описания работы устройства не играет роли. Применив к уравнениям (1), (3) и (4) метод конечных разностей, получают систему алгебраических уравнений -Pi-1,j+2Pi,j-P
-Pi-1,j+2Pi,j-P +
+  -Pi,j-1+2Pi,j-P
-Pi,j-1+2Pi,j-P =0 (5)
=0 (5) -Ui-1,j+2Ui,j-U
-Ui-1,j+2Ui,j-U = -Δxvi,j (6)
= -Δxvi,j (6) -vi-1,j+2vi,j-v
-vi-1,j+2vi,j-v =Δx
=Δx Pi,j+m
Pi,j+m (7)
(7)
i = 1,2,...,m; j = 1,2,...,n (8)
На чертеже Рi,j - напряжение в узлах R-сетки 3 с проводимостью gx и gy, Ui,j - напряжения в узлах первой R-цепочки 5 с проводимостями gx(1), Ii,j(1) - значения токов в первом комплекте 7 управляемых источников тока, vi,j - напряжения в узлах второй R-цепочки 6 с проводимостями gx(2), Ii,j(2) - значения токов во втором комплекте 8 управляемых источников тока, ωi,j - значение выходного напряжения двухвходового сумматора 9. Согласно методу узловых напряжений электрическая схема устройства описывается системой уравнений gx[- Pi-1,j+2Pi,j-Pi+1,j]+gy[-Pi,j-1+ 2Pi,j-Pi,j+1] = 0 (9)
gx[- Pi-1,j+2Pi,j-Pi+1,j]+gy[-Pi,j-1+ 2Pi,j-Pi,j+1] = 0 (9)
gx(1)[-Ui-1,j + 2Ui,j - Ui+1,j] = Ii,j(1); (10)
gx(2)[-vi-1,j + 2vi,j - vi+1,j] = Ii,j(2). (11)
Подставив уравнения в (9)-(11)
gx=  ; gy=
; gy=  ; g
; g ; g
; g (12)
(12)
I
I Pi,j+m
Pi,j+m (14) видят, что уравнения (9)-(11) тождественно совпадают с исходными уравнениями (5)-(7), потому что блок 4 уравновешивания схемным путем вырабатывает управляющие сигналы необходимых значений согласно его электрической схеме:
(14) видят, что уравнения (9)-(11) тождественно совпадают с исходными уравнениями (5)-(7), потому что блок 4 уравновешивания схемным путем вырабатывает управляющие сигналы необходимых значений согласно его электрической схеме:
ωi,j=Pi,j+m (15)
(15)
Работает устройство следующим образом.
Набирают на наборном поле устройства значения R-сетки 3, первой R-цепочки 5 и второй R-цепочки 6, проводимости которых рассчитывают по формулам (12). Настраивают дифференциаторы 12 и 13 так, чтобы их выходное напряжение было равно
Ψi,j=m (16) Настраивают управляемые источники тока в первом комплекте 7 и втором комплекте 8 так, чтобы их выходные токи были подчинены условиям (13) и (14). Затем с помощью блока 1 задания граничных условий задают значения граничных условий в граничные узлы R-сетки 3, первой R-цепочки 5 и второй R-цепочки 6, а с помощью блока 2 задания начальных условий подают в конденсаторы дифференциатора 12 и дифференциатора 13 заданные начальные значения и включают устройство в работу. Тогда под воздействием граничных условий в узлах R-сетки 3 и первой R-цепочки 5 появляются напряжения Pi,j и Ui,j. Эти напряжения поступают на входы двухвходового сумматора 9 через катодные повторители 10 и 11. Причем напряжение Ui,j с помощью дифференциаторов 12 и 13 преобразуется в напряжение Ψi,j согласно формуле (16). Выходное напряжение ωi,jдвухвходового сумматора 9 поступает на соответствующий вход второго комплекта 8 управляемых источников тока, в которых вырабатываются токи Ii,j(2) согласно условиям (14). Под воздействием поданных токов в узлах второй R-цепочки 6 напряжения vi,j изменяют свои значения, и они поступают на управляющие входы первого комплекта 7 управляемых источников тока, в которых вырабатываются токи Ii,j(1) согласно условиям (13). Под воздействием этих токов узловые напряжения Ui,j в первой R-цепочке 5 изменяют свои значения и снова поступают на соответствующие входы блока 4 уравновешивания, с помощью которого реализуются в узлах первой R-цепочки 5 бигармонические колебания балки в жидкости. С помощью какого-либо устройства считывания информации результат моделирования изгибных колебаний балок в жидкости регистрируется в соответствующих узлах первой R-цепочки 5 и R-сетки 3.
(16) Настраивают управляемые источники тока в первом комплекте 7 и втором комплекте 8 так, чтобы их выходные токи были подчинены условиям (13) и (14). Затем с помощью блока 1 задания граничных условий задают значения граничных условий в граничные узлы R-сетки 3, первой R-цепочки 5 и второй R-цепочки 6, а с помощью блока 2 задания начальных условий подают в конденсаторы дифференциатора 12 и дифференциатора 13 заданные начальные значения и включают устройство в работу. Тогда под воздействием граничных условий в узлах R-сетки 3 и первой R-цепочки 5 появляются напряжения Pi,j и Ui,j. Эти напряжения поступают на входы двухвходового сумматора 9 через катодные повторители 10 и 11. Причем напряжение Ui,j с помощью дифференциаторов 12 и 13 преобразуется в напряжение Ψi,j согласно формуле (16). Выходное напряжение ωi,jдвухвходового сумматора 9 поступает на соответствующий вход второго комплекта 8 управляемых источников тока, в которых вырабатываются токи Ii,j(2) согласно условиям (14). Под воздействием поданных токов в узлах второй R-цепочки 6 напряжения vi,j изменяют свои значения, и они поступают на управляющие входы первого комплекта 7 управляемых источников тока, в которых вырабатываются токи Ii,j(1) согласно условиям (13). Под воздействием этих токов узловые напряжения Ui,j в первой R-цепочке 5 изменяют свои значения и снова поступают на соответствующие входы блока 4 уравновешивания, с помощью которого реализуются в узлах первой R-цепочки 5 бигармонические колебания балки в жидкости. С помощью какого-либо устройства считывания информации результат моделирования изгибных колебаний балок в жидкости регистрируется в соответствующих узлах первой R-цепочки 5 и R-сетки 3.
Использование в устройстве двух R-цепочек 5 и 6 с управляемыми источниками 7 и 8 тока, токи которых вырабатываются с помощью блока 4 уравновешивания согласно формулам (13) и (14), выгодно отличает предложение от прототипа, потому что расширяет его функциональные возможности за счет моделирования изгибных колебаний балок в жидкости. Подобные задачи на противопоставленном устройстве моделировать невозможно, так как оно предназначено для моделирования задач теории поля, описываемых только уравнениями типа уравнения теплопроводности. Однако уравнения (1) и (2) содержат кроме уравнения теплопроводности (1) бигармоническое уравнение (2), которые, как было показано выше, моделируются на предложенном устройстве, что доказывает достижение цели изобретения. Кроме того, предложенное устройство обладает высокой степенью точности по сравнению с известными решениями [1], так как реализуется оно на базе R-сеток и функциональных преобразователях аналоговой вычислительной техники, работающих на постоянном токе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ РАСПРЕДЕЛЕННЫМИ СИСТЕМАМИ | 1988 |
|
RU2022360C1 |
| Устройство для решения задач тепломассопереноса | 1983 |
|
SU1159041A1 |
| Устройство для решения нелинейных задач теории поля | 1985 |
|
SU1357982A1 |
| Устройство для моделирования граничных условий | 1988 |
|
SU1547004A1 |
| Устройство для решения обратной задачи теплопроводности | 1988 |
|
SU1522248A1 |
| Устройство для решения краевых задач теории поля | 1985 |
|
SU1265813A1 |
| Устройство для решения дифференциальных уравнений в частных производных смешанного типа | 1986 |
|
SU1345218A1 |
| Устройство для решения обратной задачи теплопроводности | 1985 |
|
SU1298780A1 |
| Устройство для моделирования сваи в грунте | 1977 |
|
SU622120A1 |
| Устройство для решения краевых задач | 1983 |
|
SU1113816A1 |
Изобретение относится к вычислительной технике и может быть использовано для моделирования задач гидросооружений. Цель изобретения - расширение функциональных возможностей за счет воспроизведения изгибных колебаний балок в жидкости. Устройство содержит R-сетку, блоки задания начальных и граничных условий, группы управляемых источников тока, блок уравновешивания и R-цепочки. 1 ил.
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ИЗГИБНЫХ КОЛЕБАНИЙ БАЛОК, содержащее R-сетку, блок задания начальных условий, блок задания граничных условий, две группы управляемых источников тока и блок уравновешивания, содержащий два дифференциатора, выходы блоков задания начальных и граничных условий соединены с граничными узлами R-сетки, отличающееся тем, что, с целью расширения функциональных возможностей путем воспроизведения изгибных колебаний балок в жидкости, в него введены две R-цепочки, в блок уравновешивания - два повторителя и сумматор, выход которого подключен к входу задания величины тока соответствующего управляемого источника тока первой группы, выходы управляемых источников тока первой группы соединены с узловыми точками первой R-цепочки и с входами задания величины тока одноименных управляемых источников тока второй группы, выходы которых подключены к узловым точкам второй R-цепочки, свободные выводы граничных резисторов R-цепочек соединены с соответствующими выходами блока задания граничных условий, выход соответствующего управляемого источника тока второй группы подключен к входу первого повторителя, выход которого через последовательно соединенные два дифференциатора соединен с первым входом сумматора, второй вход которого подключен к выходу второго повторителя, вход которого соединен с соответствующим узлом R-сетки, выход блока задания начальных условий соединен с входами задания времени дифференцирования дифференциаторов.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ НЕЛИНЕЙНЫХ ЗАДАЧ ТЕОРИИ ПОЛЯ | 0 |
|
SU290289A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
