Изобретение относится к наклонным подъемникам и может быть использовано на горнорудных карьерах и в шахтах.
Известен карьерный подъемник, содержащий подъемную машину, выполненную в виде установленного на направляющих локомотива, который посредством тягового каната связан с установленной на других направляющих транспортной емкостью, направляющие которого горизонтальны, при этом направляющие локомотива расположены с уклоном.
Недостатком известного канатного подъемника является снижение его производительности за счет размещения локомотива на горизонтальных направляющих.
Известный подъемник отличается от предложенного тем, что направляющие локомотива расположены с уклоном, противоположно направленным уклону направляющих транспортной емкости, под углом к горизонту, определяемым из выражения
2Go sin α + Gгр (sin α + f1 cos α ) +
+ ρ L (sin α + f2 cos α ) = 2Gл sin β +
+ ρ L (sin β + f2 cos β ) , (1) где Gо - собственная масса транспортной емкости;
α - угол наклона направляющих транспортной емкости;
Gгр - масса полезного груза в транспортной емкости;
f1 - коэффициент сопротивления движению транспортной емкости;
ρ - линейная масса тягового каната;
L - длина тягового каната;
f2 - коэффициент сопротивления движению тягового каната;
Gл - масса локомотива;
β - угол наклона направляющих локомотива, и выполнены с дополнительным участком, расположенным в их нижней части под углом γ к горизонту, определяемым из соотношения 0 ≅γ < β.
Постоянный угол наклона направляющих локомотива обуславливает и постоянную по величине продольную составляющую его веса. В конце подъемной операции, когда локомотив приближается к конечной части своих направляющих, движущее усилие должно быть резко уменьшено и применено торможение. При постоянном большом значении продольной составляющей веса локомотива и большой скорости движения режим торможения становится очень тяжелым, что влечет за собой интенсивный износ тормозных средств локомотива и самих направляющих, сокращая их ресурс и увеличивая расходы на их восстановление, а также снижает безопасность работы.
Нижний конечный участок направляющих локомотива имеет меньший угол наклона, чем угол наклона участка направляющих локомотива, где движение происходит с постоянной скоростью.
На чертеже схематически изображен канатный подъемник с обозначением угла α наклона направляющих подъемного сосуда, угла β наклона направляющих локомотива на участке установившегося движения и угла γ наклона направляющих локомотива на участке замедленного движения. Причем направляющие локомотива представлены в виде профиля, т.е. без закруглений на сопряженных участках с разными углами наклона.
Согласно изобретению канатный подъемник содержит направляющие 1, по которым перемещается транспортная емкость 2, соединенная при помощи тягового каната 3 с локомотивом 4. Локомотив установлен на направляющих, участок 5 которых, соответствующий периоду установившегося движения, имеет угол наклона β, а участок 6, соответствующий периоду замедленного движения, имеет угол наклона γ.
Выражение для определения угла наклона направляющих локомотива выведено следующим путем.
В начале подъема груженого подъемного сосуда статическое сопротивление подъемной системы будет
Fc' = g[(Gо + Gгр) sin α + (Gо + Gгр) x
xf1 cos α + ρ L (sin α + f2 cos α) -
- Gл (sin β - f1 cos β)]. (2)
В начале опускания порожнего подъемного сосуда статическое сопротивление подъемной системы
Fc'' = g [Gл (sin β + f1 cos β) +
+ ρL (sin β + f2 cos β) -
- Gо (sin α - f1 cos α)] . (3)
Исходя из поставленной цели обеспечить равенство статических сопротивлений при подъеме груженого подъемного сосуда и при опускании порожнего подъемного сосуда, приравниваем правые части вышеприведенных выражений (2) и (3) и получим искомое соотношение
2Gо sin α+ Gгр (sin α + f1 cos α ) +
+ ρ L (sin α + f2 cos α) = 2Gл sin β +
+ ρ L (sin β + f2 cos β ).
Предложенный канатный подъемник работает следующим образом.
В начале подъемной операции загруженная емкость 2 находится в нижней точке своих направляющих 1, а локомотив 4 - в верхней точке участка 5 своих направляющих. С началом подъема скорость всей подъемной системы возрастает до максимального значения. Продольная составляющая веса локомотива помогает работе его двигателей. В конце подъемной операции, когда скорость движения начинает уменьшаться от максимального значения до нуля, то есть когда действует замедление, силы инерции противодействуют уменьшению скорости. Поэтому в точке участка 5 направляющих, соответствующей началу действия замедления, направляющим придается угол γ, меньший угла β.
Таким образом, появляется дополнительный участок 6 направляющих. С уменьшением угла наклона направляющих уменьшается и продольная составляющая веса локомотива, что уменьшает движущее усилие и создает более легкий режим торможения, уменьшает путь торможения.
Использование в канатном подъемнике уменьшенного угла наклона конечного участка направляющих позволяет увеличить ресурс тормозных средств локомотива за счет уменьшения необходимого тормозного усилия.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНАТНЫЙ ПОДЪЕМНИК | 1988 |
|
RU2009099C1 |
| Канатный подъемник | 1990 |
|
SU1794846A1 |
| ШАХТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 1991 |
|
RU2048417C1 |
| Шахтная подъемная установка | 1990 |
|
SU1775347A1 |
| Многоканатный подъемник | 1989 |
|
SU1782907A1 |
| Канатный наклонный подъемник | 1988 |
|
SU1631019A1 |
| СПОСОБ СТАТИЧЕСКОГО УРАВНОВЕШИВАНИЯ ПОДЪЕМНОЙ УСТАНОВКИ | 1990 |
|
RU2027657C1 |
| Многоканатный подъемник | 1988 |
|
SU1576462A1 |
| Многоканатный подъемник | 1989 |
|
SU1765093A1 |
| Скип | 1990 |
|
SU1710479A1 |
Использование: горно-рудничные и шахтные наклонные подъемники. Сущность изобретения: канатный подъемник содержит локомотив 4, установленный на направляющих, участок 5 которых размещен под углом β к горизонту и которые имеют дополнительный участок 6 в нижней своей части, размещенный под углом g к горизонту, определяемым из соотношения 0≅ γ< β . При этом угол b определяется из выражения 2Gosinα + Gгр·(sinα + f1cosα) + ρL(sinα+ f2cosα) = 2 Gл sinβ + ρL (sinβ + f2cosβ) . Локомотив 4 соединен тяговым канатом 3 с транспортной емкостью 2, установленной на направляющих, размещенных под углом α к горизонту. 1 ил.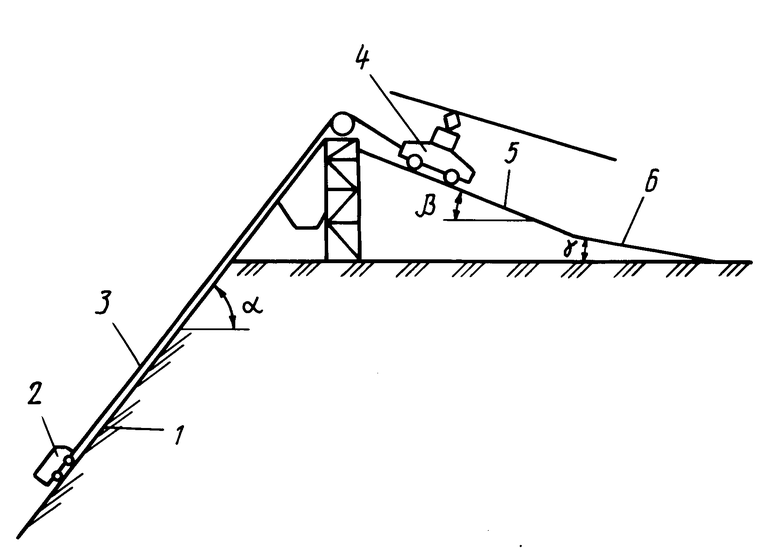
КАНАТНЫЙ ПОДЪЕМНИК, содержащий подъемную машину, выполненную в виде установленного на направляющих локомотива, соединенного посредством тягового каната с транспортной емкостью, также размещенной на направляющих, расположенных с уклоном, отличающийся тем, что направляющие локомотива расположены с уклоном к горизонту, противоположным уклону направляющих транспортной емкости, угол наклона направляющих локомотива определяется из выражения
2G0 ˙ sinα + Gгp(sinα + f1˙ cosα) +
+ ρL (sinα + f2˙ cosα) = 2Gл ˙ sinβ +
+ ρL (sinβ + f2˙ cosβ) ,
где G0 - собственная масса транспортной емкости;
α - угол наклона направляющих транспортной емкости;
Gгр - масса полезного груза в транспортной емкости;
f1 - коэффициент сопротивления движению транспортной емкости;
ρ - линейная масса тягового каната;
L - длина тягового каната;
f2 - коэффициент сопротивления движению тягового каната;
Gл - масса локомотива;
β - угол наклона направляющих локомотива;
при этом направляющие локомотива выполнены с дополнительным участком, расположенным в их нижней части под углом γ к горизонту, определяемым из соотношения 0 ≅ γ < β .
| Подъемник транспортных средств с горной массой из карьеров | 1988 |
|
SU1519991A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
