Изобретение относится к горному делу, конкретно к креплению очистных забоев при безлюдной выемке весьма тонких пластов.
В основном изобретении описано устройство для дистанционного возведения клиновой крепи в очистном забое при безлюдной выемке. Это устройство включает связанные с тяговым органом выемочного механизма рамы для доставки в очистной забой комплектов крепи, расположенных внутри рам, расклинивающие приспособления для их расклинивания в выработанном пространстве. Каждая рама выполнена П-образной и боковин с упорами и поперечины. Внутри рам расположены удерживающие элементы, в пазах котоpых размещены основания (клинья) клиновой крепи. Расклинивающие элементы (верхняки) размещены в направляющих, выполненных V-образными на жестко закрепленных одними концами на боковинах рам жесткого удерживающего и упругого расклинивающего, например, из рессорной стали рычагов. Жесткий рычаг расположен между упругим рычагом и поперечиной [1].
Обеспечение надежности установки комплекта клиновой крепи до момента касания верхняка с кровлей при обратном ходе устройства достигается применением в его конструкции массивной внешней рамы, по которой или внутри которой перемещается внутренняя П-образная рама. Такое конструктивное решение не только увеличивает вес устройства для дистанционного возведения клиновой крепи, но что главное - не всегда гарантирует надежность расклинивания комплекта крепи между почвой и кровлей, например, при углах падения пласта 18о и выше, наличии воды на почве лавы сырых комплектах крепи или при заклинивании внутренней и внешней рам. Кроме того, закрепление устройства на тяговом органе выемочной машины снижает использование последней для ведения очистных работ во времени.
Целью изобретения является расширение области применения устройства, повышение его надежности и обеспечение возможности разделения во времени и пространстве процесса выемки и крепления очистного забоя.
Это достигается тем, что в устройстве для дистанционного возведения клиновой крепи на внутренней раме смонтирована направляющая, в которой находится холостая ветвь тяговой цепи, при этом направляющая имеет прорезь, над которой установлен рычаг-замок, предназначенный для фиксирования рамы на холостой цепи, и стопор, подвижно соединенный с двуплечим рычагом, имеющем на конце рычаг-флажок, контактирующий с холостой ветвью тяговой цепи, и подпружиненный упор, а на внешней раме установлен упор, позволяющий выводить рычаг-замок из зацепления со звеньями цепи.
При движении холостой цепи в сторону, обратную выработки, из которой устанавливаются комплекты крепи, рычаг-флажок входит в зацепление с одним из звеньев цепи; стопор освобождает рычаг-замок и тот, падая в прорезь направляющей, попадает в горизонтальное звено цепи и таким образом фиксирует внутреннюю раму на холостой цепи. Одновременно имеющийся на нем ролик (выступ) начинает накатываться на упор, и рычаг-зазор освобождается от зацепления со звеном цепи. Расстояние, на котором происходят фиксация и рассоединение внутренней рамы с холостой ветвью цепи, равно свободному ходу верхняка комплекта крепи по клину.
Такое конструктивное решение позволяет расширить область применения устройства, повышает его надежность и обеспечивает возможность разделения во времени и пространстве процесса выемки и крепления очистного забоя.
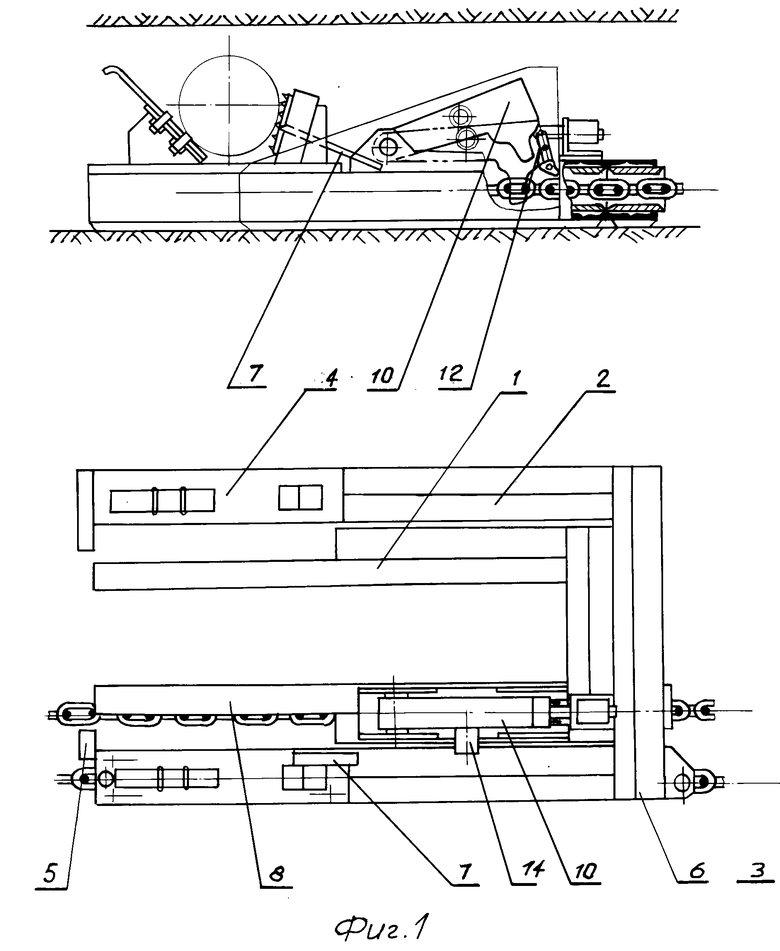
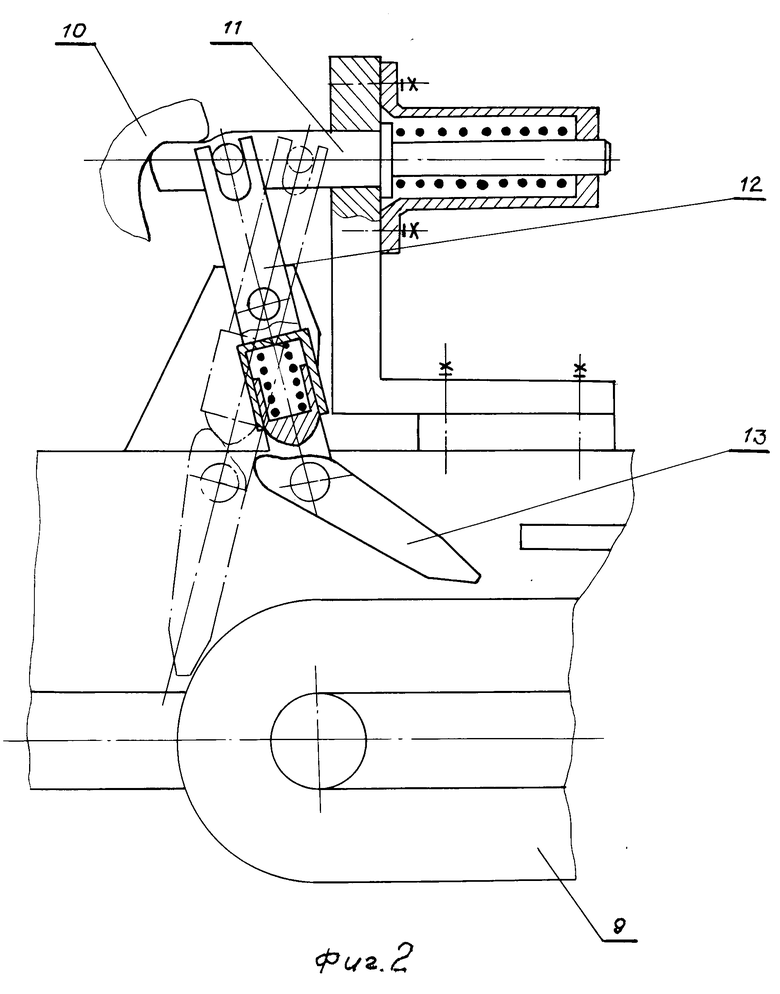
На фиг. 1 изображен общий вид описываемого устройства в двух проекциях; на фиг. 2 - стопор рычага-замка.
Устройство для дистанционного возведения клиновой крепи включает внутреннюю 1 и внешнюю 2 П(Ш)-образные рамы. На внешней раме 2, которая жестко крепится к грузовой ветви 3 тяговой цепи, смонтированы расклинивающее приспособление 4 (расклинивающий и удерживающий элементы), упор 5, поперечина 6, клиновой упор 7. Внутренняя рама 1 имеет направляющую (например, трубу) 8, в которой проходит холостая ветвь 9 тяговой цепи. Направляющая 8 имеет прорезь, над которой установлен рычаг-замок 10. Рычаг-замок 10 в транспортном положении устройства (движение к месту установки комплекта крепи, при котором внутренняя рама 1 вместе с установленными в ней клином комплекта увлекается внешней рамой 2 через поперечину 6) удерживается над пазом направляющей 8 стопором 11, подвижно соединенным с двуплечим рычагом 12, имеющим на конце рычаг-флажок 13. Зарядка стопора 8 осуществляется в штреке. В транспортном положении устройства рычаг-флажок 13 свободно скользит по звеньям движущейся в направляющей 8 холостой ветви 9 тяговой цепи. На рычаге-замке 10 устанавливается ролик 14, контактирующий при определенном положении внутренней 1 и внешней 2 рам с клиновым упором 7.
После доставки комплекта крепи на место установки, реверсируется движение тягового органа. Внешняя рама 2 увлекается тяговой цепью в направление штрека, из которого ведется установка крепи. Холостая ветвь 9 тяговой цепи при этом также меняет направление движения. Рычаг-флажок 13, встретив первое же вертикальное звено цепи, занимает новое положение (на фиг. 2 показано штрих-пунктирной линией) и через двуплечий рычаг 12 выводит стопор 11 из зацепления с рычагом-замком 10. Последний под собственным весом падает в паз направляющей 8 и оказавшись в горизонтальном звене тяговой цепи, фиксирует таким образом внутреннюю раму 1 к цепи и не только задерживает ее, но и подает ее вместе с клином комплекта навстречу движущейся в обратном направлении внешней рамы 2, несущей в расклинивающем приспособлении верхняк комплекта. Одновременно ролик 14 рычага-замка наезжает на клиновой упор 7 и начинает поднимать рычаг-замок 10. Полное высвобождение рычага-замка 10 происходит в момент касания внутренней рамы 1 упоров 5 на внешней раме, то есть после полного расклинивания крепи. Через упоры 5 внешняя рама 2 увлекает внутреннюю раму 1 к месту зарядки нового комплекта крепи. Цикл работ по возведению крепи можно повторять.
Работа устройства на собственном тяговом органе позволяет разделить во времени и пространстве процессы непосредственно выемки угля в очистном забое от крепления его призабойного пространства. В конечном итоге это позволит резко увеличить нагрузку на лаву.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного возведения клиновой крепи | 1988 |
|
SU1620641A1 |
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1992 |
|
RU2026982C1 |
| ПРОХОДЧЕСКИЙ КОМПЛЕКС | 1990 |
|
RU2006584C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ЗАКЛАДКИ ПОРОДЫ В ВЫРАБОТАННОЕ ПРОСТРАНСТВО | 1996 |
|
RU2097570C1 |
| УСТРОЙСТВО ДЛЯ ВОЗВЕДЕНИЯ ИСКУССТВЕННЫХ ЦЕЛИКОВ ИЗ БЛОКОВ | 1992 |
|
RU2057947C1 |
| Струговая установка | 1989 |
|
SU1754895A1 |
| КОМБАЙН | 1992 |
|
RU2057930C1 |
| Струговый агрегат | 1988 |
|
SU1661409A1 |
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1998 |
|
RU2144138C1 |
| ЗАБОЙНЫЙ ПЕРЕГРУЖАТЕЛЬ | 1992 |
|
RU2054559C1 |
Использование: для крепления очистных выработок при безлюдной выемке весьма тонких пластов. Сущность изобретения: устройство для дистанционного воздействия клиновой крепи содержит связанные тяговым органом в виде цепи П-образные рамы из боковин с упорами и поперечин, в которых между упорами и поперечинами установлены дополнительные рамы с пазами. На боковинах П-образных рам установлены у-образные направляющие из закрепленных одними концами упругого и жесткого рычагов. Последний расположен между упругим рычагом и поперечиной. В пазах дополнительных рам установлены основания клиновых крепей, а в направляющих - их расклинивающие элементы. Дополнительная рама имеет направляющую с прорезью. В направляющей размещена холостая ветвь цепи. Над прорезью установлен рычаг-замок для фиксирования рамы на холостой ветви тягового органа. На дополнительной раме шарнирно закреплен двуплечий рычаг с подпружиненным упором и рычагом-флажком для взаимодействия с холостой ветвью на нижнем конце, а также стопор, подвижно соединенный с другим концом двуплечего рычага и рычагом-замком. П-образная рама имеет клиной упор на боковине для выведения рычага-замка из зацепления со звеньями цепи. 2 ил.
УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ВОЗВЕДЕНИЯ КЛИНОВОЙ КРЕПИ, включающее комплекты клиновой крепи из оснований и расклинивающих элементов, расположенные внутри связанных с тяговым органом, имеющим холостую ветвь, П-образных рам, каждая из которых выполнена из боковин с упорами и поперечины, установленные в П-образных рамах между поперечинами и упорами дополнительные рамы с пазами, в которых размещены основания клиновой крепи, расклинивающие элементы которых установлены в У-образных направляющих из жестко закрепленных одними концами на боковинах упругого и жесткого рычагов, последний из которых расположен между упругим рычагом и поперечиной, отличающееся тем, что, с целью расширения области применения устройства, повышения его надежности и обеспечения возможности разделения во времени и пространстве процесса выемки и крепления очистного забоя, дополнительная рама снабжена направляющей, выполненной с прорезью, установленным над прорезью рычагом-замком для фиксирования рамы на холостой ветви тягового органа, выполненного в виде цепи, размещенной в направляющей, шарнирно закрепленным двуплечим рычагом с подпружиненным упором и рычагом-флажком для взаимодействия с холостой ветвью тяговой цепи на нижнем конце, и стопором, подвижно соединенным с другим концом двуплечего рычага и рычагом-замком, при этом П-образная рама снабжена клиновым упором, установленным на боковине с возможностью выведения рычага-замка из зацепления со звеньями цепи.
| Устройство для дистанционного возведения клиновой крепи | 1988 |
|
SU1620641A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
