Изобретение относится к дорожно-строительной технике и может быть использована в качестве системы автоматического или автоматизированного управления асфальтоукладчиками, скрейперами, бульдозерами и другими дорожно-строительными машинами (ДСМ) и их исполнительными органами.
Принцип построения существующих систем управления ДСМ основан на прокладке в непосредственной близости от зоны работы ДСМ базовой линии (механической или оптической) или плоскости, определении текущих линейных и угловых рассогласований ДСМ и (или) ее рабочего органа относительно базовой линии (плоскости) выработке по результатам сравнения с заданными координатами соответствующих управляющих сигналов.
Основными требованиями к системе управления данного назначения являются обеспечение требуемой точности и обслуживание ДСМ в заданной зоне ее возможного перемещения по дистанции и углам в горизонтальной и вертикальной плоскостях. Повышение этих требований, а также требования повышения проводимости ДСМ приводят к необходимости создания новых систем, среди которых наиболее перспективными являются лазерные системы, обзор которых приведен в книге [1]
Известна система управления УКЛ-2, сведения о которой приведены в книге [2]
Система УКЛ-2 содержит установленный на штативе лазерный задатчик опорной плоскости (базовый прибор), включающий лазерный излучатель, систему светоповоротных зеркал, коллиматор и пентапризму. Построенный таким образом базовый прибор формирует в пространстве лазерный луч в форме двух взаимно перпендикулярных плоскостей, одна из которых ориентируется под заданным углом к горизонту и служит для управления положением исполнительного органа ДСМ по высоте, а другая вертикальная используется для управления курсом движущейся ДСМ. В систему управления также входят фоточувствительные головки (ГФЧ) "Курс" и "Уклон". При попадании на указанные ГФЧ соответствующих лучей световые сигналы преобразуются в электрические и при помощи блока выработки команд формируют управляющие команды исполнительных устройств ДСМ для перемещения исполнительного органа по высоте и корректировки курса движения ДСМ.
Недостатком рассмотренной системы является:
низкая точность управления, т.е. в процессе выработки команд не учитывается угол крена и изменение дистанции от базового прибора до ДСМ;
малый угловой сектор возможного перемещения ДСМ относительно базового прибора в зоне действия автоматической системы управления.
Известен также серийно выпускаемый агрегатированный комплект унифицированных приборов "АКА-Дормаш" [3] предназначенных для автоматического управления рабочими органами различных ДСМ, выполняющих работы по заданным отметкам, уклону и направлению. Базовая система управления на основе комплекта "АКА-Дормаш", выбранная в качестве прототипа предлагаемой системы, содержит лазерный излучатель и теодолит, объединенные в базовый прибор. На ДСМ установлен фотоприемник с приводом (подъемным устройством, изменяющим высоту расположения фотоприемника над ДСМ, соединенный через блок формирования управляющих сигналов (этот блок может быть выполнен на ЦВМ) с приводом исполнительного органа ДСМ.
Недостатками прототипа, как и указанного выше аналога, является низкая точность управления ДСМ, т.к. при выработке команд не в полном объеме учитываются возможные линейные и угловые отклонения рабочего органа на ДСМ от требуемого положения, а также малая зона (по углу и дистанции) обслуживания ДСМ без перенастройки и перестановки базового прибора.
Целью изобретения является повышение точности управления ДСМ и ее исполнительным органом при одновременном увеличении зоны обслуживания ДСМ по углу и дистанции без перестановки и перенастройки базового прибора.
Достоинством предлагаемой системы является возможность ее работы в автоматическом режиме после начальной установки при прокладке как прямых, так и изогнутых участков трассы. Известные ранее варианты обеспечивали работы на прямолинейных участках трассы или на трассе с незначительными угловыми отклонениями (единицы градусов по вертикали и горизонтали). На трассах со значительными уклонами и поворотами требовалась многократная перестановка базового прибора, что влекло за собой снижение точности изготовления дорожного покрытия и значительные временные затраты.
Сущность предлагаемого технического решения заключается в том, что в лазерной системе управления дорожно-строительной машиной, содержащей базовый прибор с лазером, кинематически соединенными с теодолитом, и установленную на дорожно-строительной машине приемную оптическую систему, состоящую из приемной оптической головки, соединенной с приводом исполнительного органа дорожно-строительной машины, базовый прибор снабжен шестикоординатной лазерной приемопередающей головкой, ЦВМ и индикаторным прибором, а оптическая головка приемной оптической системы, установленной на дорожно-строительной машине выполнена в виде идентичной шестикоординатной лазерной приемопередающей головки, при этом и базовый прибор, и приемопередающая система снабжены шестнадцатиканальным амплитудно-цифровым преобразователем (АЦП), суммирующим усилителем, дешифратором, согласующим усилителем, шифратором, двумя усилителями мощности и двумя цифроаналоговыми преобразователями, причем оптическая ось передающей части приемопередающей головки базового прибора сопряжена с осью приемной части приемопередающей головки приемной оптической системы, каждая лазерная приемо-передающая головка установлена в двухстепенных кордановых подвесах с двумя электромеханическими приводами и двумя датчиками угла поворота лазерной приемопередающей головки относительно установочного корпуса, передающая часть каждой лазерной головки содержит оптически последовательно сопряженные лазер, оптический модулятор, коллиматор и цилиндрическую линзу, а приемная часть состоит из четырех жестко скрепленных друг с другом в одной фронтальной плоскости оптических линз, в фокусе каждой из которых установлены четырехплощадочные квадратные фотоприемники с четырехканальными усилителем, выходы которого через канальный амплитудно-цифровой преобразователь соединены с первым входом ЦВМ, а через последовательно соединенные суммирующий усилитель и дешифратор со вторым входом ЦВМ, выходы датчиком угла поворота лазерной приемопередающей головки соединены с третьим и четвертым входами ЦВМ, первый выход ЦВМ базового прибора соединен с индикаторным прибором, второй выход ЦВМ соединен через последовательно соединенные шифратор и согласующий усилитель с оптическим модулятором передающей части приемопередающей головки, третий и четвертый выходы ЦВМ через последовательно-соединенные цифроаналоговые преобразователи (ЦАП) и усилители мощности соединения с электромеханическими приводами лазерной приемопередающей головки.
Благодаря использованию двух идентичных приемопередающих лазерных головок на базовом приборе и ДСМ, установки их в кордановые подвесы с электромеханическими приводами, управляемых ЦВМ, появилась возможность измерить с большой точностью положение линии визирования (линии между лазерным излучателем базового прибора и центром оптической приемной системы), которая является текущей базовой линией, измерить линейные (в вертикальной и горизонтальной плоскости и по дистанции) и угловые отклонения, обменяться информацией о результатах измерений одной и другой лазерной головкой, взаимно компенсируя погрешности измерений.
Поясним понятие шестикоординатная лазерная головка. Для полного описания положения твердого тела (ДСМ и ее исполнительного органа) в неподвижной системе координат (в нашем случае земной декартовой географической системе координат) необходимо знание трех линейных координат, например X, Y, Z, положения центра масс этого тела или другой точки, жестко связанной с ним и являющейся центром собственной системы координат твердого тела, а также три угловые координаты углы поворота тела относительно трех главных осей собственной системы координат. Лазерная головка, позволяющая определить все шесть указанных координат, названа шестикоординатной. Термин головка перешел из терминологии системы управления беспилотными летательными аппаратами, а именно от устройств, называемых головками самонаведения.
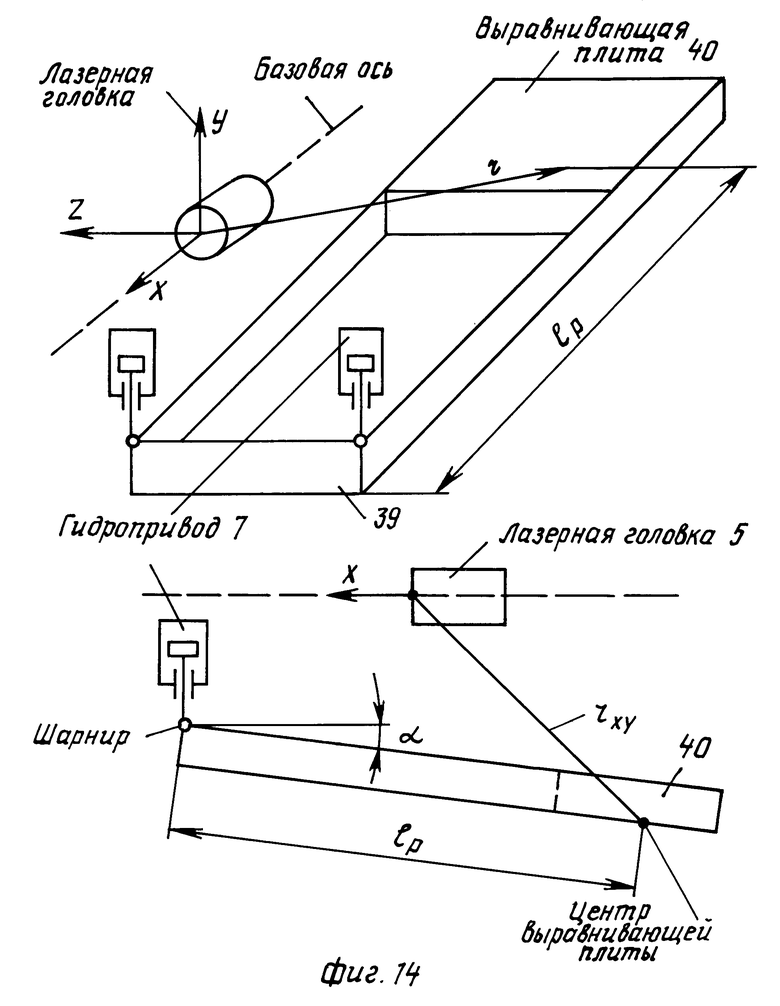
На фиг. 1 приведена структурная схема лазерной системы управления, выбранной в качестве прототипа, на фиг. 2 структурная схема предлагаемой системы в части базового прибора; на фиг. 3 структурная схема предлагаемой системы в части аппаратуры, размещенной на дорожно-строительной машине; на фиг. 4 компоновочная схема базового прибора; на фиг. 5 компоновочная схема оптической головки; на фиг. 6 схема координат относительно карты местности и базовой линии; на фиг. 7 схема засветки четырехплощадочного квадратного чувствительного элемента при отсутствии угловых рассогласований лазерного луча и приемного устройства; на фиг. 8 схема засветки четырехплощадочного квадратного чувствительного элемента при наличии угловых рассогласований лазерного луча и приемного устройства; на фиг. 9 пеленгационная характеристика углового дискриминатора; на фиг. 10 схема засветки приемной системы при отсутствии линейных смещений оси лазерного луча и оси приемного устройства; на фиг. 11 схема засветки приемной системы при наличии линейных смещений оси лазерного луча и оси приемного устройства; на фиг. 12 - функциональная схема подсистемы управления угловым положением лазерной приемопередающей головки; на фиг. 13 функциональная схема подсистемы, управления рабочим органом; на фиг. 14 схема пространственного расположения исполнительного органа асфальтоукладчика и лазерной головки.
В соответствии с фиг. 1 известная лазерная система управления содержит базовый прибор 1, состоящий из лазера 2 и теодолита 3, жестко скрепленных друг с другом, и размещенной на дорожно-строительной машине аппаратуры 4, состоящей из оптической головки 5, соединенной через ЦВМ 6 с приводом 7 исполнительного органа.
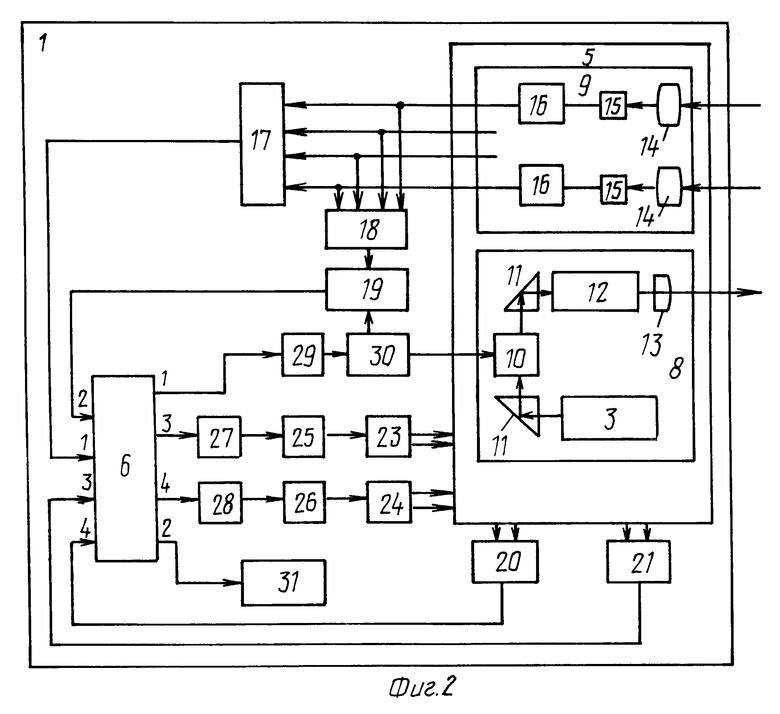
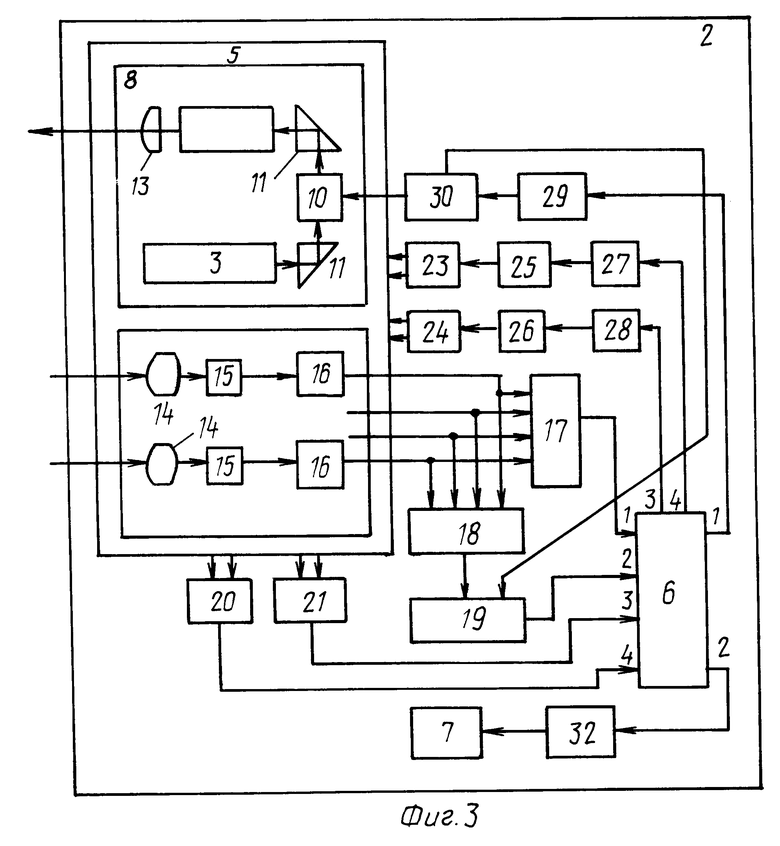
Предлагаемая система управления состоит также из двух основных частей, показанных на фиг. 2 и фиг. 3, где дополнительно введены передающая часть 8 лазерной приемопередающей головки 5 и приемная часть 9 лазерной оптической головки 5. Передающая часть 8 состоит из лазера 2 оптических призм 11, оптического модулятора 10, коллиматора 12 и цилиндрической линзы 13. Приемная часть 9 состоит из четырех оптических линз 14, в фокусе каждой из которых установлен четырехплощадочный квадратный фотоприемник 15 с четырехканальным усилителем 16. 16 выходов усилителей 16 параллельно соединены через шестнадцатиканальный аналого-цифровой преобразователь (АЦП) 17 с первым входом ЦВМ и через последовательно соединенные суммирующий усилитель 18 и дешифратор 19 со вторым входом ЦВМ, лазерная оптическая головка 5 установлена в двухстепенном кордановом подвесе с электромеханическими приводами 23 и 24, способными поворачивать лазерную оптическую головку 5 относительно основания прибора в горизонтальной и вертикальной плоскости и датчиками угла поворота 20 и 21 соответственно. Управляющие входы приводов 23 и 24 соединены через усилители мощности 25 и 26, а также цифроаналоговые преобразователи (ЦАП) 27 и 28 с третьим и четвертым выходами ЦВМ. Первый выход ЦВМ через шифратор 29 и согласующий усилитель 30 соединен с управляющим входом оптического импульсного модулятора 10.
Структурное отличие базового прибора 1 и аппаратура 4 ДСМ в том, что в базовом приборе 1 второй выход ЦВМ соединен с индикаторным устройством 31, а в аппаратуре 4, размещенной на ДВС, второй выход ЦВМ через согласующее устройство 32 соединен с управляющим входом привода 7 исполнительного органа ДСМ. Кроме того в состав базового прибора входит теодолит 3.
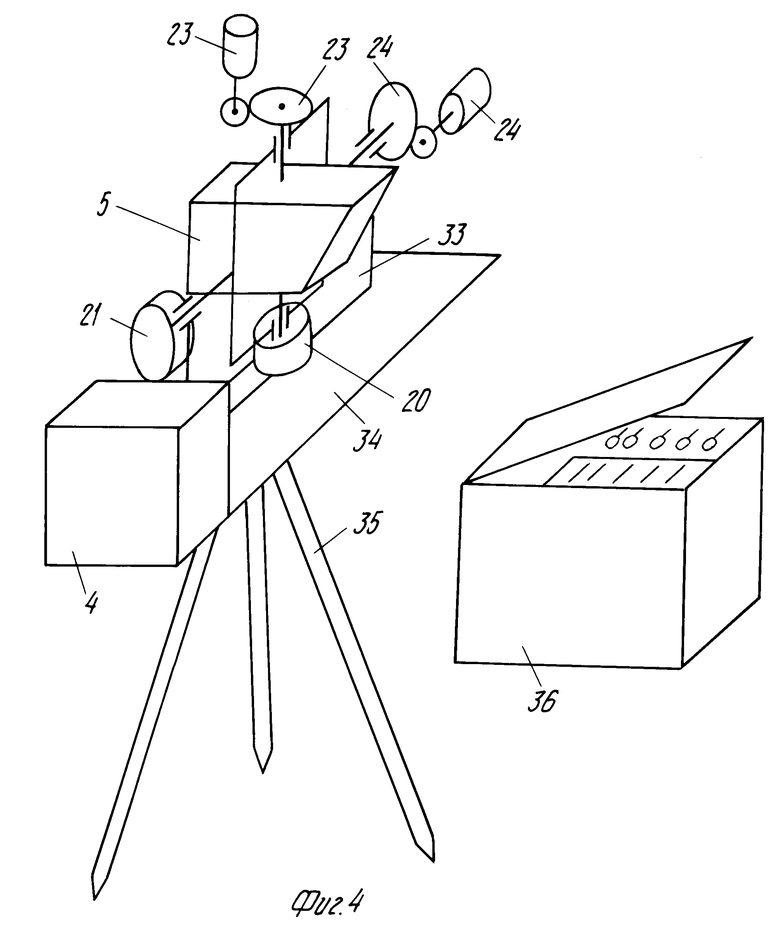
На фиг. 4 приведена схема конструктивной компоновки базового прибора. Он состоит из следующих основных частей: лазерная оптическая головка 5 (передающая часть 8 и приемная часть 9), двухстепенной кордановый подвес 33 с двумя электромеханическими приводами 23, 24 и датчиками углов поворота 20, 21, теодолит 3, общее основание 34, на котором устанавливается теодолит, оптическая и электромеханическая часть базового прибора, тренога 35, электронная часть 36 базового прибора оформляется в виде пылевлагонепроницаемого переносного контейнера с откидной крышкой, под которой расположена клавиатура управления ЦВМ и другие органы управления и настройки и индикации 31. Теодолит 3 и поворотный оптический блок 1 и 4 жестко скреплен друг с другом общим основанием 34, которое устанавливается на треноге 35 теодолита. Защитным кожухом с оптико-прозрачными окнам закрывается аппаратура, расположенная на основании 34. Этот кожух на фиг. A не показан.
Конструктивная схема расположения блоков и устройств в лазерной головке 5 показана на фиг. 5, на которой дополнительно обозначен корпус прибора 37, вертикальная ось 38 поворота прибора в горизонтальной плоскости, в верхней части прибора 1 располагается передающая часть 8, состоящая из газового лазера 2, электрооптического модулятора 10 и коллиматора 12. Для удобства компоновки в прибор введены призмы 11 полного внутреннего отражения, поворачивающие лазерный луч на импульсный модулятор 10 и далее в коллиматор 12.
Основное конструктивное отличие оптической части базового прибора 1 и аппаратуры 4 в том, что при установке прибора 1 с аппаратурой 4 в непосредственной близости друг от друга ось передающей системы прибора 1 сопряжена с осью приемной системы аппаратуры 4, а ось приемной системы прибора 1 с осью передающей части аппаратуры 4. Такое вертикальное расположение приемных и передающих частей обеспечивает отсутствие дополнительных угловых рассогласований базового прибора 1 и аппаратуры 4 ДСМ.
Принцип действия предлагаемой системы следующий. Базовый прибор, совмещенный с теодолитом, устанавливается на строящейся дороге или в непосредственной близости от нее, в начале или конце участка, где предполагается непрерывная работа ДСМ, например, в течение смены. При помощи теодолита осуществляется привязка базового прибора к местности, после чего выставляется базовая линия лазерным лучом. Затем выставляется начальное положение лазерного луча, сопряженное с начальным положением ДСМ. Начальное положение лазерного луча может не совпадать с базовыми линиями, их начальное рассогласование определяется при помощи датчиков 20 и 21 углов поворота оптического прибора и запоминается в ЦВМ. При помощи базовой линии происходит привязка проектного задания (координат строящейся дороги) к месту установки базового прибора фиг. 6. Текущие координаты требуемого проектным заданием положения ДСМ определяются пересчетом их относительно положения лазерного луча, соединяющего в идеальном случае центры базового прибора и оптической головки. Угловое положение этой линии, определяемое датчиками 20 и 21, и дистанция от базового прибора до ДCМ указывают истинное положение ДСМ относительно базовой линии. Поскольку проектные координаты профиля дороги также привязаны к базовой линии, разница между ними определяет ошибку, которую при помощи управляющих воздействий следует сводит к нулю или минимизировать. Последнюю задачу выполняет система управления движением ДСМ и ее исполнительные элементы, точнее, ее соответствующие контура или подсистемы.
Увеличение точности предлагаемой системы управления достигается тем, что точное угловое рассогласование оптической оси головки ДСМ и базового прибора определяется при помощи измерения линейного отклонения энергетической оси лазерного луча на дистанции L. Т.е. рассогласование в горизонтальной плоскости
Δψ = ΔZ мг/L,
а в вертикальной
Δϑ = ΔY мг/L,
где Zмг и Yмг линейные отклонения лазерного луча в плоскости апертуры машинной головки в горизонтальной и вертикальной плоскости.
Максимальная погрешность измерения угловой координаты
δψmax= δZ/L+δL•Zmax/L∧2 (1)
Очевидно, что в данном случае погрешность уменьшается с увеличением дистанции. Например, на дистанции 500 м при грубом измерении Z с точностью 1 см погрешность определения углового рассогласования составляет 0,02 мрад или 12 угловых секунд.
Другим обстоятельством, позволяющим увеличить точность измерения координат, является то, что системы управления лазерными лучами соответственно оптическими осями, базового прибора и оптической головки ДСМ находятся в режиме синхронной пространственной связи и максимально быстро в силу малой инерционности подвижной части оптической головки по сравнению с ДСМ или ее рабочим органом отрабатывают угловые рассогласования в вертикальной и горизонтальной плоскостях.
Рассмотрим подробнее назначение, состав и принцип действия базового прибора. По своему составу и принципу действия он совпадает с аппаратурой, установленной на ДСМ. На фиг. 4 приведена схема конструктивной компоновки базового прибора, а конструктивная схема расположения блоков и устройств в лазерной головке 32 показана на фиг. 5.
Предлагаемый базовый прибор предназначен для создания базовой оптической оси, ее угловой ориентации, автоматического изменения ее положения, измерения угловых отклонений новой базовой оси от первоначальной и передачи информации об измеренных угловых отклонениях лазерной оптической головки, установленной на ДСМ.
Предлагаемый базовый прибор 1 требует только первоначальной установки, после чего он автоматически отслеживает направление на оптическую головку и определяет величины угловых рассогласований с исходной оптической осью. Для обеспечения автоматической работы в структуру базового прибора 1 включены электромеханические приводы (20 и 21, 6, 23 и 24), а для передачи информации об отработанных отклонениях линии связи (14, 15, 16, 18 и 6).
Основным элементом базового прибора, как и известных ранее, является лазерный передатчик 8, включающий в себя лазер 2 с источником питания и предназначенный для создания базовой оптической оси. Непрерывное лазерное излучение преобразуется в импульсные сигналы модулятором 10, формируется передающей оптической системой 12, 13 и направляется на оптичную головку ДСМ. В передающей части базового прибора и аппаратуры ДСМ используется, например, гелий-неоновый лазер с длиной волны излучения 0,63 мкм.
В свою очередь, лазерный сигнал, поступающий с лазерной головки ДСМ, принимается приемным оптическим устройством 9, проходя через линзы 14 на фоточувствительные элементы 15 и усилители 16, преобразуясь из оптического сигнала в электрический.
В качестве чувствительного элемента 15 используется четырехплощадный квадратный фотодиод ФД-142 или ФД-151, имеющие спектральную чувствительность, близкую к максимальной для выбранной длины волны 0,63 мкм. Такие фотодиоды используются в координаторах систем управления (наведения) беспилотных летательных аппаратов.
Идея использования четырехплощадочного квадрантного чувствительного элемента состоит в следующем. Если направление падающего светового потока (лазерного луча) совпадает с оптической осью приемной оптической системы, то изображение источника излучения равномерно проецируется на все четыре элементарные площадки чувствительного элемента, как показано на фиг. 7.
В этом случае амплитуды сигналов с каждого элемента равны между собой, т.е. U1=U2=U3=U4
При угловом смещении оптической оси приемной системы относительно оси лазерного луча при условии попадания лазерного луча в апертуру оптической системы произойдет смещение проекции лазерного луча в фокальной плоскости, т.е. на светочувствительных площадках, как показано на фиг. 8.
При этом: U1≠U2≠U3≠U4
На изменении разницы энергии (мощности), принимаемой различными площадками основано измерение углового смещения (рассогласования) осей приемного оптического устройства и лазерного луча. При малых рассогласованиях сигналы, пропорциональные угловому смещению в вертикальной Uϑ и горизонтальной Uy плоскости, определяются следующими соотношениями
где Kϑ, Kψ коэффициенты пропорциональности.
Важно отметить, что при параллельном смещении оптических осей приемной части и лазерного луча в пределах апертуры приемной оптики положение пятна засветки (или распределение энергии по чувствительным площадкам) в фокальной плоскости не изменяется.
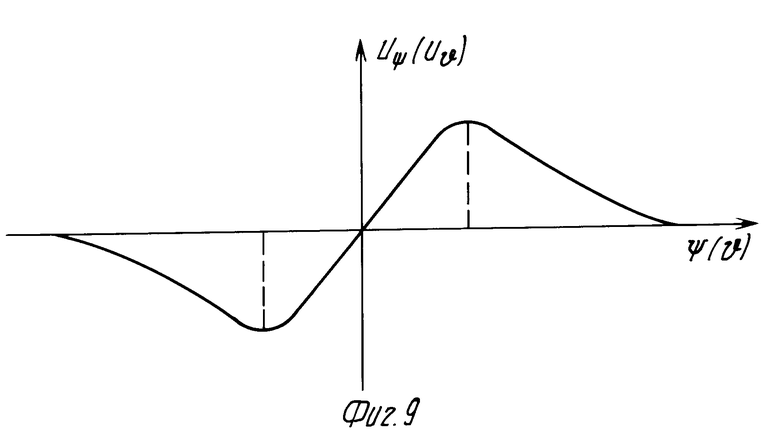
Пример пеленгационной характеристики Uψ(ψ) приведен на фиг. 9. Эта характеристика имеет линейный участок в районе нуля и максимум при смещении проекции лазерного пятна в одну полуплоскость. Чтобы участок линейной характеристики был наибольшим, целесообразно расфокусировать пятно лазерного луча в фокальной плоскости приемного устройства на диаметр, соизмерный с диаметром чувствительного элемента (10-15 мм).
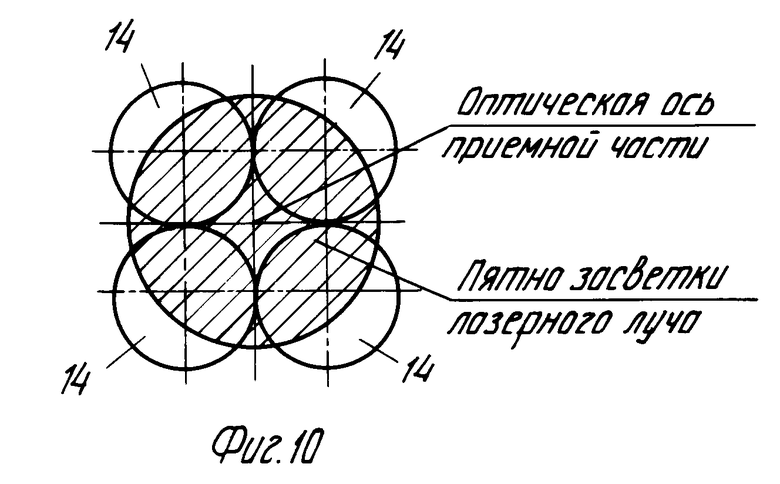
Для измерения линейных отклонений приемного устройства от оси лазерного луча используются приемные оптические системы с параллельными оптическими осями, смещенными друг относительно друга в вертикальной и горизонтальной плоскостях, как показано на фиг. 10 и фиг. 11.
Если центр лазерного луча совпадает с центром четырехлинзовой системы (фиг. 10), то сигналы, снимаемые с чувствительных элементов (для многоплощадочного чувствительного элемента необходимо взять суммарный сигнал UΣ со всех площадок) каждой оптической системы будут одинаковыми, что гарантируется предварительной настройкой системы, т.е. в этом случае
UΣ1= UΣ2= UΣ3= UΣ4
В противном случае (фиг. 11) суммарные сигналы чувствительных элементов не равны и сигналы, пропорциональные линейным отклонениям Uy и Uz, определяются соотношениями
где Ky, Kz коэффициенты пропорциональности.
Максимальное значение линейного смещения ΔY(или ΔZ) обеспечивается при смещении оптических осей передающего и приемного устройства на величину, равную половине расстояния между оптическими осями приемных оптических систем.
Для измерения угла крена γ (угла поворота приемного устройства относительно оси лазерного луча) в предлагаемой системе в передающее устройство введена цилиндрическая линза 13, которая из осесимметрического распределения энергии в сечение лазерного луча превращает его в эллипсообразное. Таким образом, появляется возможность получения сигнала Uγ, пропорционального углу крена g, используя соотношение
где Kγ коэффициент пропорциональности.
Важно отметить, что это соотношение справедливо только при угловых (Δψ, Δϑ) и линейных (ΔY, ΔZ) отклонениях, близких к нулю. Именно это условие наиболее полно обеспечивается в предлагаемой системе за счет постоянного автоматического пространственного совмещения осей передающей части базового прибора и приемной части ДСМ, а также осей передающей части ДСМ и приемной части базового прибора.
Для расшифровки передаваемой по лазерному лучу информации со всех выходов усилителей 16 все сигналы суммируются на суммирующем усилителе 18, с выхода которого поступают на дешифратор 19. В дешифраторе 19 выделяются сигналы с линейных рассогласованиях, измеренных оптической головкой ДСМ, и сигнал измеренной дистанции до ДСМ, которые поступают на второй вход ЦВМ 6.
С каждого из 16 выходов усилителей 16 сигналы через 16 канальный АЦП поступают на первый вход ЦВМ 6, где далее из них формируются сигналы управления приводом 23 горизонтального поворота и приводом 24 вертикального поворота. На привода поступают аналоговые сигналы, предварительно преобразованные цифроаналоговыми преобразователями ЦАП 27, 28 и усиленные по мощности в усилителях 25, 26. Привода осуществляют (в соответствие с управляющими сигналами) повороты подвижной части 32 базового прибора.
Отметим, что во взаимосвязи всех систем базового прибора и лазерной головки ДСМ, во взаимном обмене информации заключается качественное отличие предлагаемой системы от полуавтоматического варианта.
Базовый прибор синхронно с импульсами задающей частоты ЦВМ излучает пачки лазерных импульсов, несущих информацию об его угловом положении и служащих для определения угловых и линейных отклонений другой лазерной головки от базовой оси.
Одним из специфических новых блоков, вошедших в состав базового прибора, является импульсный модулятор лазерного излучения. Качество работы всей автоматической системы в значительной степени обеспечивается качеством и надежностью передачи информации (модуляцией излучения). Наиболее пригодным для надежной кодово-импульсной модуляции является электрооптический преобразователь. В известных ранее системах (аналоги и прототип) модуляторы предназначены для развертки лазерного луча в пространстве, формировании базовой плоскости и равносигнальной зоны. Они выполнены в виде вращающихся или колеблющихся зеркал. В предлагаемой системе модулятор выполняет другие функции, а именно превращает (модулирует) непрерывное излучение лазера 2 в импульсное. При этом пачка импульсов (число импульсов и интервалы между ними) несет в себе информацию о результатах измерений и вычислений координат ДСМ относительно базового прибора 1, используя, например, рекомендованный ГОСТ 26765.52-87 и правила для линии связи и обмена информацией между цифровыми устройствами и ЦВМ.
Приборный состав лазерной приемопередающей головки, устанавливаемой на ДСМ, в оптико-электронной и электромеханической частях одинаковы с базовым прибором. Дополнительное отличие только в отсутствии теодолита и крепежных приспособлениях, а также наличии дополнительных ЦАП для сигналов управления рабочим органом ДСМ и при необходимости его рулевым приводом.
Рассмотри особенности измерения дистанции между базовым прибором 1 и лазерной оптической головкой 4 ДСМ. В предлагаемом варианте построения системы управления ДСМ используется идентичность лазерной оптической головки ДСМ и базового прибора, наличием в их составе импульсного модулятора.
Простейший дальномер, пригодный для рассматриваемого случая основан на посылке импульса световой энергии из одного прибора и получении ответного импульса от другого прибора, где он задерживается на известное строго постоянное время tф. Дистанция L в этом случае определяется через суммарное время задержки t3 между зондирующим импульсом и ответным сигналом
L (t3 tф) /2 • C
где C скорость распространения лазерного излучения в атмосфере.
Измерение времени задержки t3 в дешифраторе 19 (здесь он выполняет функции дальномера) относительно импульса излучения (используется связь с шифратором 29, содержащим синхронизатор с частотой 10 мГц), позволяет определить дистанцию L с точностью 15 м (величина измеряемого временного дискрета 100 нс.)
Использование синхронизатора на 50 мГц и измерение временного интервала задержки с точностью до полупериода частоты синхронизатора позволяет измерить задержку с точностью 10 нс (т.е. дистанцию с точностью 1,5 м) на величину младшего разряда.
Дальнейшее увеличение точности прямым импульсным измерением проблематично (нужно переходить на другие длительности импульсов, точностью измерения интервала задержки должна быть соизмерима с длительностью импульса).
Предлагается для улучшения точности определения дистанции использовать нониусную систему измерения, суть которой в следующем. Зондирующий сигнал формируется в виде пачки 7-31 импульсов с периодом 7/8-31/32 Тп, где Тп длительность пачки. Сравнивая принимаемую последовательность из 7-31 импульсов с последовательностью на 8-32 импульсов за период Тп на соответствующих схемах сравнения дешифратора 19 и, отмечая номер импульса максимального совпадения, можно примерно на порядок повысить точность измерения.
Основную трудность измерения дистанции импульсным методом составляет значительная длительность зондирующих импульсов, а также длительность их переднего фронта. Рекомендуемый модулятор на электрооптическом затворе позволяет формировать импульсы с частотой до 10 мГц и передним фронтом 10-20 нс. Таким образом, измеряемое время задержки соизмеримо с длительностью импульса.
Угловые рассогласования Δψог и Δϑог отрабатываются приводами поворота оптической головки. Поскольку инерционность поворотной части лазерной оптической головки мала по сравнению с ДСМ и ее рабочим органом, быстрая отработка угловых рассогласований обеспечивает максимальную точность измерения линейных отключений ΔYог и ΔZог.
Отличием предлагаемой системы от известных является использование более точного измерения углового отклонений оптической оси лазерной головки ДСМ от оптической оси базового прибора, причем, чем больше дистанция, тем точнее это измерение (1). Отрабатывать это угловое рассогласование при помощи привода оптической головки нецелесообразно по двум причинам:
возникает неопределенность управления, если показания собственного углового дискриминатора оптической головки не совпадают с вычисленными при помощи дистанции рассогласования;
-реальная точность отработки углового рассогласования приводами оптической головки ниже, чем точность его дистанционного измерения.
Таким образом, можно следящие приводы углового положения лазерной оптической головки принять системой грубого отсчета, а рассогласование, измеряемое дистанционно, использовать как поправку к положению оптической оси лазерной головки ДСМ относительно базового прибора.
Отметим, что алгоритмы управления оптической осью лазерными оптическими головками ДСМ и базового прибора идентичны, т.к. идентично их структурное и конструктивное построение, оптические схемы и электромеханические приводы.
Программно-математическое обеспечение СУ ДСМ состоит из нескольких основных частей.
Проектное задание это массив дискретных значений, задающий профиль поверхности дороги в географических координатах, например, Xг - направление на Север, Zг направление на восток и Yг - направление местной вертикали.
Высота дорожного покрытия Y(Xп, Zп) является исходной для системы управления ДСМ и определяется заранее.
Программа базового прибора обеспечивает пересчет проектных координат в географической системе относительно исходного (начального) положения базовой оси. Это поворот системы координат вокруг оси Yг на угол F и смещение начала координат в точку расположения базового прибора (Xб, Yб, Zб), как показано на фиг. 6.
Y (Xг Xб) / CosF + (Zг Zб- (Xр - Xб) • SinF)SinF,
Zи (Zр Zб) • CosF (Xр Xб) • SinF,
Yи Yu Yб
Координаты с индексом "и" исходные координаты для системы управления ДСМ, привязанные к месту расположения базового прибора.
Текущие координаты ДСМ (Xм, Yм, Zм), измеряемые базовым прибором, определяются соотношениями:
Xм= L•sinψб; Yм= L•cosψб; Zм= L•sinϑб,
где ψб, ϑб углы, измеряемые лазерной оптической головкой базового прибора относительно нулевого начального положения базовой оси:
ψб= ψвг+ΔZм/L; ϑб= ϑвг+ΔYм/L,
где ψвг, ϑвг сигналы датчиков углов поворота оптической головки базового прибора; ΔZм, ΔYм линейные рассогласования, изменяемые оптической головкой ДСМ.
По линии связи, образованной двумя лазерными оптическими головками, передаются текущие координаты ДСМ, измеренные базовым прибором, на оптическую головку ДСМ. Угловые координаты ориентации лазерной головки 5 относительно ДСМ определяются датчиками приводов ψог и ϑог а более точное положение корпуса ДСМ относительно оптической оси базового прибора определяется с учетом поправок измерения линейного рассогласования
Простейшие алгоритмы определения линейных и угловых рассогласований по сигналам фотоприемного устройства оптической головки следующие.
Входных сигналов для обработки 16, непрерывных (аналоговых) сигналов Uij, где i и j от 1 до 4.
Вручную вводятся значения коэффициентов Kψ, Kϑ, Kγ/ , Kz, Ky и число измерений для усреднения n.
Предварительная обработка, например, усреднение:
где τ дискретность съема показаний Uij, t ≈ 0,01-0,1 c, n 32-256.
Вычисление величины рассогласования
где Kψ= Kϑ= 0,025 рад.
где Kγ 0,25 рад, Ky Kz ≈ 70 мм (определяется конструктивными размерами оптических элементов 8 и 9).
Стандартными программными средствами предусматривается вывод любых измеряемых или вычисляемых сигналов в графическом и табличном виде для оперативного контроля, а также обеспечивается запись всех измерений и вычисляемых величин на гибкий магнитный диск для последующего анализа.
В рассмотренном здесь варианте повышение точности измерения положения рабочего органа дополнительно достигается за счет отсутствия погрешности линейных приводов смещения оптической головки относительно корпуса ДСМ и работы при минимальных угловых рассогласованиях оптических осей лазерных оптических головок ДСМ и базового прибора.
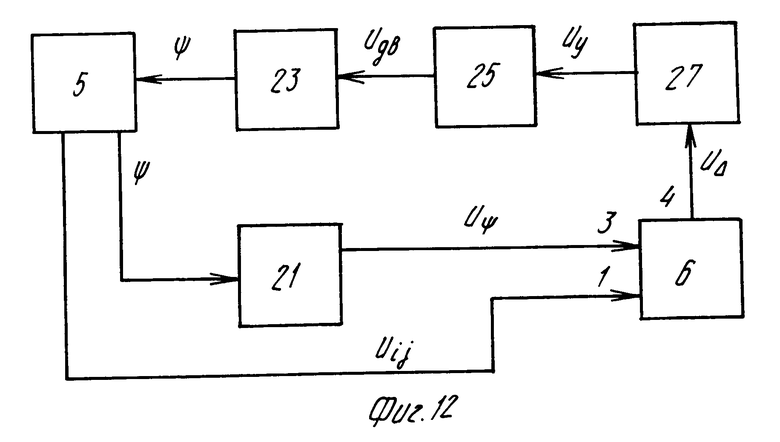
Для примера на фиг. 12 приведена функциональная схема подсистемы углового сопровождения лазерного луча в одной плоскости.
Аналогичная подсистема отрабатывает рассогласование в другой плоскости. Подсистема представляет типовую позиционную электромеханическую следящую систему, где дискриминатор (устройство выявления величины и знака рассогласования) реализован на ЦВМ, которая формирует сигнал управления приводом поворота оптической головки.
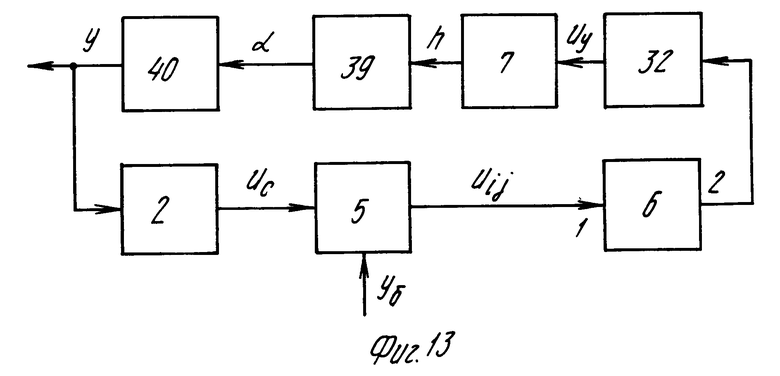
На фиг. 13 приведена для приема функциональная схема контура (подсистемы) управления положением рабочего органа асфальтоукладчика (гладильной плиты). Схема пространственного расположения основных элементов привода исполнительного органа и оптической головки приведена на фиг. 14, которая поясняет функционирование системы управления. На этих чертежах обозначена 39 рама, передний конец которой шарнирно соединен с гидравлическим приводом 7, а задний конец жестко скреплен с гладильной плитой 40.
Важным представляется определение погрешности линейных и угловых рассогласований ДСМ и ее рабочего органа. Рассогласование места нахождения ДМС относительно проектного задания определяется как минимальное расстояние между точкой нахождения ДСМ и траекторией ее расчетного по проекту движения, т. е. из условия  или
или
находятся значения Xи и и, например, методом численного перебора проектной траектории в окрестности Xм, Zм.
Отработка выявленных рассогласований по высоте для измерения положения рабочего органа происходит при помощи контура управления. Изменение положения ДСМ и ее рабочего органа в горизонтальной плоскости может осуществляться водителем-оператором ДСМ вручную или системой управления движением автоматически.
При ручном управлении оператору сообщается знак и величина линейного отклонения в горизонтальной плоскости от проектной траектории, т.е. ΔL. Оператор, управляя тормозом или сцеплением правой или левой (соответствующей знаку отклонения) гусеницы, сводит величину L к допустимой величине в идеальном случае L 0.
При автоматическом управлении целесообразно использовать оптимальное по точности управление по методу пропорционального или параллельного сближения при ограничении на радиус поворота реальной трассы, например, путем импульсного торможения соответствующей гусеницы на расчетных интервалах времени, обеспечивая сопряжение с расчетной траекторией по касательной.
Отметим, что при автоматическом управлении ДСМ целесообразно использовать одновременно два вида управления: программное (в соответствии с расчетной траекторией) и управление по отклонению. Первый тип управления позволяет прогнозировать изгибы трассы и формировать соответствующие управляющие сигналы, а второй будет обеспечивать высокое качество и точность при малых отклонениях.
Сведения, изложенные в описании предлагаемой системы, представленные чертежи и схемы позволяют, используя существующую элементную базу и технологию, без особых трудностей разработать рабочие чертежи и по ним практически изготовить лазерную систему управления в производстве, что характеризует ее как промышленно применимую.
Назначение: изобретение относится к дорожно-строительной технике и может быть использовано для управления асфальтоукладчиками, бульдозерами, скреперами и другими машинами. Сущность изобретения: система содержит две идентичные шестикоординатные лазерные приемопередающие головки. Одна из головок находится на базовом приборе, а другая - на дорожно-строительной машине. Оптическая ось передающей части каждой головки сопряжена с осью приемной части другой головки. Это обеспечивается установкой каждой из этих головок в двухстепенных кордановых подвесках с двумя электромеханическими приводами и двумя датчиками угла поворота головки относительно установочного корпуса. При этом передающая часть лазерной головки содержит лазер, оптический импульсный модулятор, шифратор, управляемый ЦВМ, коллиматор и цилиндрическую линзу. Приемная часть через преобразователи и дешифратор соединена с ЦВМ. Этим создается двухсторонний обмен информацией об отклонениях положения рабочего органа от программного значения между базовым прибором и дорожно-строительной машиной и обеспечивается приведением рабочего органа в положение, задаваемое программой, записанной в ЦВМ. 14 ил.
Лазерная система управления дорожно-строительной машиной, содержащая базовый прибор с лазером, кинематически соединенным с теодолитом, и установленную на дорожно-строительной машине приемную оптическую систему, состоящую из приемной оптической головки и цифровой вычислительной машины, соединенной с приводом исполнительного органа дорожно-строительной машины, отличающаяся тем, что базовый прибор снабжен шестикоординатной лазерной приемопередающей головкой, цифровой вычислительной машиной и индикаторным прибором, а оптическая головка приемной оптической системы, установленной на дорожно-строительной машине, выполнена в виде идентичной шестикоординатной лазерной приемопередающей головки, при этом и базовый прибор, и приемопередающая система снабжены 16-канальным амплитудно-цифровым преобразователем, суммирующим усилителем, дешифратором, согласующим усилителем, шифратором, двумя усилителями мощности и двумя цифроаналоговыми преобразователями, причем оптическая ось передающей части приемопередающей головки базового прибора сопряжена с осью приемной части приемопередающей головки приемной оптической системы, каждая лазерная приемопередающая головка установлена в двухстепенных кардановых подвесах с двумя электромеханическими приводами и двумя датчиками угла поворота лазерной приемопередающей головки относительно установочного корпуса, передающая часть каждой лазерной головки содержит оптически последовательно сопряженные лазер, оптический модулятор, коллиматор и цилиндрическую линзу, а пpиeмнaя часть состоит из четырех жестко скрепленных друг с другом в одной фронтальной плоскости оптических линз, в фокусе каждой из которых установлены четырехплощадочные квадратные фотоприемники с четырехканальным усилителем, выходы которого через канальный амплитудно-цифровой преобразователь соединены с первым входом цифровой вычислительной машины, а через последовательно соединенные суммирующий усилитель и дешифратор с вторым входом цифровой вычислительной машины, выходы датчиков угла поворота лазерной приемопередающей головки соединены с третьим и четвертым входами цифровой вычислительной машины, первый выход цифровой вычислительной машины базового прибора соединен с индикаторным прибором, второй выход через последовательно соединенные шифратор и согласующий усилитель с оптическим модулятором передающей части приемопередающей головки, третий и четвертый выходы через последовательно соединенные цифроаналоговые преобразователи и усилители мощности с электромеханическими приводами лазерной приемопередающей головки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кононыхин Б.Д | |||
| Лазерные системы управления машинами дорожного строительства | |||
| - М.: Машиностроение, 1990 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ефремов А.Н | |||
| и др | |||
| Лазерная техника в мелиоративном строительстве | |||
| - М.: Агропромиздат, 1989, с.92 - 98 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Скловский А.А | |||
| Автоматизация строительно-дорожных машин | |||
| - Рига.: АВОТС, 1990, с.22 - 53. | |||
