Изобретение относится к радиолокационной и ракетной технике и может быть использовано в устройствах управления антенной радиолокационных станций дальнего обнаружения и наведения.
Известно устройство сопровождения по дальности радиолокационной станции SOR-584. Сопровождение цели по дальности сопровождается потенциометром задержки узких селективных импульсов. Имеется система полуавтоматического сопровождения [1].
Известно устройство для модуляции ЧМ сигналов. Если частота модуляции много больше, чем частота несущей, то входной сигнал преобразовывается в последовательность однородных импульсов, которую пропускают через фильтр нижних частот и получают постоянную составляющую. Если модулирующий сигнал изменяется быстро, по сравнению с несущей, то измеряют время между импульсами посредством стробирующего интегратора. На входе интегратора действует постоянное эталонное напряжение, и поэтому его выходное напряжение пропорционально времени.
Известно устройство для автоматического сопровождения объекта по направлению радиолокационной станции. Видеоимпульсы приемника детектируются детектором напряжения сигнала ошибки, на выходе которого получается напряжение, частота которого равна частоте вращения луча антенны.
Известно угломерное устройство системы самонаведения радиолокационной станции. Устройство содержит фазовращатель, потенциометрический датчик, звено преобразования угла в разность фаз, пеленгационное устройство. Смещение цели относительно РСН приводит к изменению фаз сигналов и появлению сигнала рассогласования и прицессии гироскопов. Выходной сигнал пеленгатора подается на усилитель мощности, соединенный с двигателем.
Наиболее близким техническим решением (прототипом) является двухканальная система автоматического сопровождения телескопа [2]. Система содержит программный задатчик, первый и второй сумматор, первый и второй приводы, первый и второй датчики, первый и второй регуляторы, коммутатор, анализирующее устройство, коммутирующую группу. Априорно составленная программа движения поступает на сумматор, где сравнивается с величиной поворота угла датчика, установленного на первом валу привода. Привод поворачивает большое зеркало с датчиком таким образом, чтобы уменьшить эту разность. Одновременно полученная разность подается на второй сумматор, где сравнивается с углом поворота выходного вала второго привода точного наведения. Выходной сигнал поворачивает малое зеркало на величину ошибки привода, снимаемого с выхода коммутирующей группы. При попадании наблюдаемого объекта в пределы диаграммы приемного устройства коммутатор подключает вход привода к выходу приемного устройства. При этом на вход привода поступает сигнал, пропорциональный отклонению линии визирования от направления на наблюдаемый объект. Привод стремится совместить линию визирования следящего инструмента с фактическим направлением на наблюдаемый объект путем поворота большого зеркала.
Недостатком известного устройства является низкая помехозащищенность и быстродействие при обработке команд управления. Повышенная помехозащищенность играет важную роль в условиях термоядерного конфликта. При ядерном взрыве возникает мощное излучение, которое имеет радиус действия в несколько тысяч километров. При таком мощном излучении возникают сильные помехи, для борьбы с которыми требуется помехоустойчивая система управления. Поскольку антенна радиолокационной станции сантиметрового диапазона и пусковые ракетные установки находятся на значительном расстоянии от командного пункта, то на длинную линию связи могут воздействовать сильные помехи, которые нарушат режим управления антенной радиолокационной станции.
Целью предлагаемого устройства является повышение помехозащищенности и быстродействия системы управления радиолокационной станции при отработке команд управления.
Поставленная цель достигнута применением бионической системы управления, скопированной у живой природы. При разработке системы учитывался биологический принцип дискретно-аналогового преобразования потенциалов спинного мозга, осуществляющих управление двигательным аппаратом. В частности, в экспериментах на животных (кошках под гексеналовым наркозом) было обнаружено, что при нанесении раздражающих частотно-модулированных импульсов на нерв, информация поступает в мозг. В верхних этажах спинного мозга частотно-модулированные импульсы попадают под действие частотно-зависимой отрицательной обратной связи. В нижних этажах спинного мозга импульсы усиливаются по мощности моторными нейронами и в таком виде по двигательному нерву активируют скелетную мышцу. Происходит преобразование ЧМ информационных сигналов в АЧМ сигналы. Полученная последовательность импульсов выделяется оптимальным фильтром мышечной системы в виде аналоговых движений двигательного аппарата.
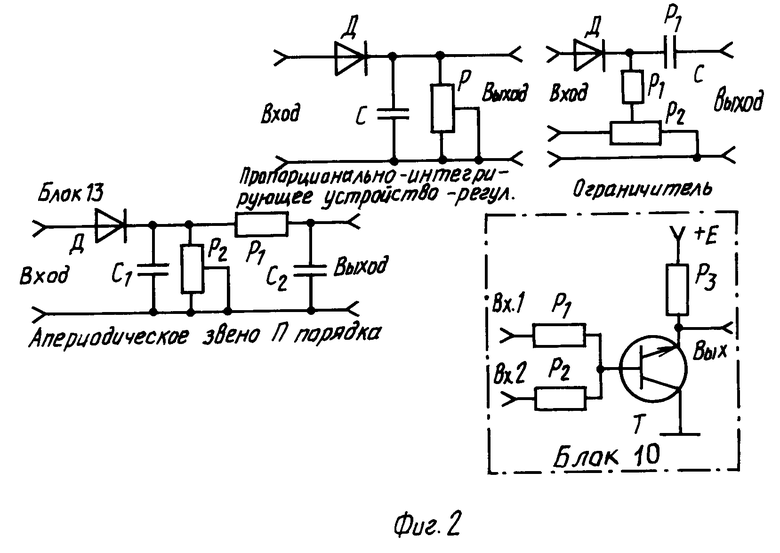
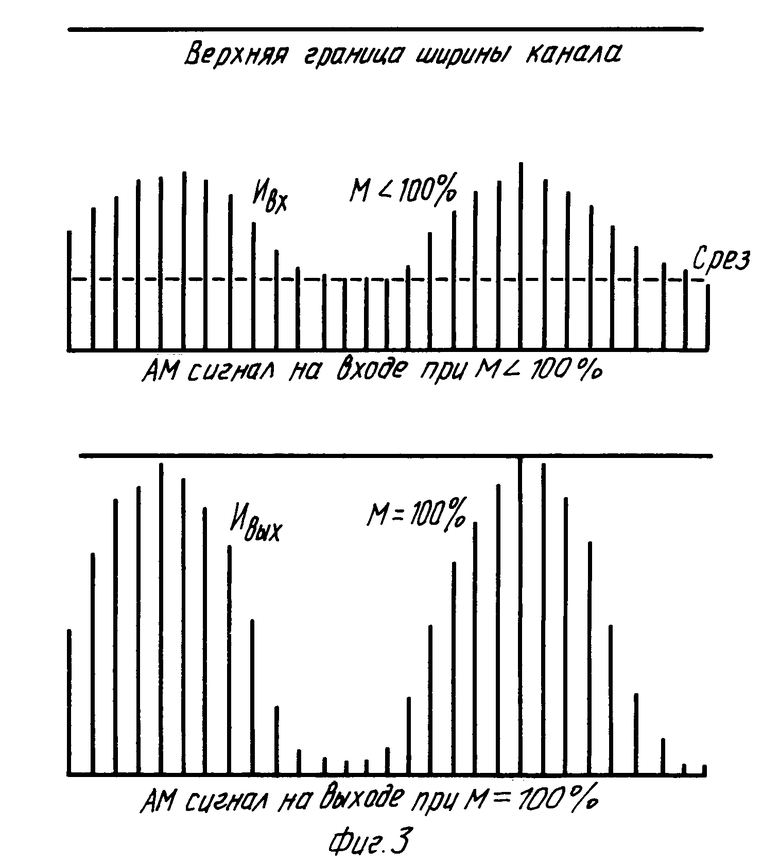
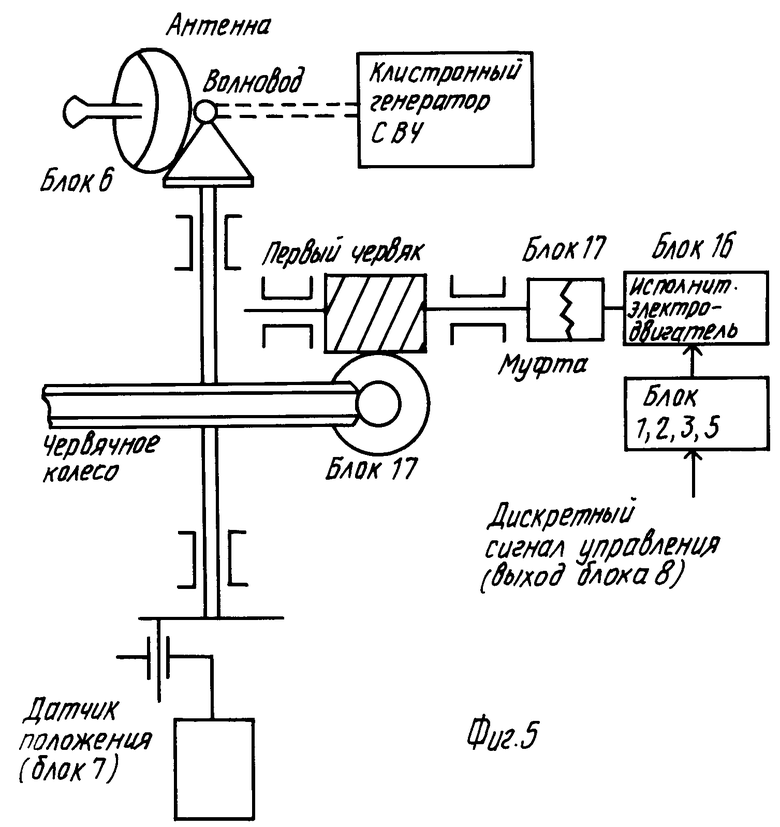
На фиг. 1 показана структурная схема и эпюры напряжений предлагаемого устройства; на фиг. 2 - принципиальные электрические схемы основных узлов предлагаемого устройства; на фиг. 3 - иллюстрация увеличения глубины модуляции на выходе устройства; на фиг. 4 - иллюстрация отношения сигнала к помехе за счет действия отрицательной обратной связи; на фиг. 5 - упрощенная кинематическая схема антенного редуктора радиолокационной станции сантиметрового диапазона; на фиг. 6 и 7 - преобразование ЧМ и АМ импульсных сигналов (демодуляция) в аналоговое напряжение огибающей с помощью пропорционально-интегрирующего устройства-регулятора.
Система управления антенной радиолокационной станции содержит (фиг. 1) задающее устройство 1, сумматор 2, пропорционально-интегрирующее устройство регулирования 3, исполнительный механизм 4, измеритель рассогласования 5, антенну 6, датчик положения 7, коммутатор 8. В свою очередь, задающее устройство 1 содержит первый ограничитель 9, первый усилитель 10, второй усилитель 11, аттенюатор 12, апериодическое звено второго порядка 13, второй ограничитель 14. Исполнительный механизм 4 содержит усилитель мощности 15, исполнительный электродвигатель 16, редуктор с муфтой 17.
В статическом положении входом задающего устройства является коммутатор 8, представляющий из себя переключатель на два положения. К средней клемме коммутатора 8 поступает сигнал управления Ивх, а крайние клеммы служат для переключения режимов модуляции с частотной "ЧМ" в верхнем положении, на амплитудную "АМ" - в нижнем положении. Выходной сигнал задающего устройства 1 поступает на верхнюю клемму сумматора 2, соединенного с исполнительным механизмом 4 через пропорционально-интегрирующее устройство регулирования 3. Выход исполнительного механизма 4 соединен с правым входом измерителя рассогласования 5 через антенну 6 и датчик положения 7. Одновременно выходной сигнал пропорционально-интегрирующего устройства регулирования 3 соединяется с левым входом измерителя рассогласования 5, выход которого соединяется с нижним входом сумматора 2. Верхняя левая клемма коммутатора 8 соединена со входом задающего устройства 1, нижняя левая клемма коммутатора 8 соединена с аттенюатором 12 задающего устройства 1, а правая нижняя клемма коммутатора 8 соединена с входом второго ограничителя 14 также задающего устройства 1. Выход первого ограничителя 9 задающего устройства 1 соединен со вторым ограничителем 14, являющимся выходом задающего устройства 1, через верхний вход первого усилителя 10, и второй усилитель 11. Выход первого усилителя 10 соединен с апериодическим звеном второго порядка 13 канала отрицательной обратной связи, выход которого соединяется с нижним входом первого усилителя 10. Выход аттенюатора 12 соединен с верхним входом первого усилителя 10. Правая средняя клемма коммутатора 8 соединена с входом второго ограничителя 14, а правая нижняя клемма соединена с верхним входом сумматора 2. Усилитель мощности 15, являющийся входом исполнительного механизма 4, соединен с выходным блоком механизма в виде редуктора с муфтой 17 через исполнительный электродвигатель 16. Конкретное выполнение блоков устройства показано на фиг. 2 и 5. Контакт 1б коммутатора 8 свободный. Привод антенны (фиг. 5) состоит из собственно антенны СВЧ 6 и датчика положения 7, который представляет из себя многооборотный потенциометр, сельсин или другой датчик. В состав привода антенны входит также червячный редуктор. С антенной СВЧ связан клистронный генератор СВЧ через волновод (фиг. 5). Входной сигнал вида 18-21 поступает от командного пункта на контакт 0а коммутатора 8. Эта информация транслируется от командного пункта. Трансляции информации необходима при размещении радиолокационной станции вдали от пункта сбора информации. Примером могут служить системы дальнего обнаружения ракет. Транслируются видеоимпульсы целей, импульсы углового положения антенны радиолокационной станции, команды поворота антенны и т.д.
Система управления антенной радиолокационной станции работает следующим образом. При воздействии амплитудно-модулированных импульсов 19 на клемму 0а коммутатора 8, последний ставится в положение "АМ". При этом контакт 0а соединяется с клеммой 2а, а контакт 0б соединяется с контактом 2б. При этом второй ограничитель 14 задающего устройства 1 закорачивается, а первый ограничитель 9 не используется. Амплитудно-модулированные импульсы (например, по синусоиде 19) воздействуют непосредственно на первый усилитель 9, проходя аттенюатор 12 (потенциометр). Усилитель 10 охвачен отрицательной обратной связью за счет апериодического звена второго порядка 13. Первый усилитель 10 имеет два входа. Аттенюатором 12 подбирается необходимая амплитуда из условия минимальных искажений. Проходя второй усилитель 11, выполняющий роль усилителя и буферного каскада, АМ-импульсы поступают на верхний вход сумматора 2. При этом блок 14 (второй ограничитель) не используется ввиду закорачивания путем соединения клемм 0б и 2б коммутатора 8. С выхода блока 2 сумматора импульсы поступают на блок 3 пропорционально-интегрирующего устройства регулирования (фиг. 1 и 2), на котором происходит преобразование АМ импульсов 19 в аналоговый сигнал 21, как показано на фиг. 6. Аналоговый сигнал 21 после усиления усилителем мощности 15 поступает на привод в виде исполнительного электродвигателя 16. Электродвигатель 16 через муфту с редуктором 17 приводит во вращение антенну 6 (фиг. 1 и 5). С выхода датчика положения 7 в виде потенциометра или сельсина снимается сигнал, амплитуда которого пропорциональна углу поворота антенны. На измеритель 5 рассогласования поступает напряжение, снимаемое с датчика положения 7. Пусть это будет потенциометр. Тогда сигнал с выхода потенциометра поступает на правый вход блока 5 измерителя рассогласования. На левый вход этого блока поступает сигнал управления с выхода пропорционально-интегрирующего устройства регулирования 3. Полярность напряжения на выходе потенциометра выбирается такого знака, чтобы при равенстве напряжений, поступающих на входы блока 5, на выходе напряжение рассогласования было равно нулю. В этом случае антенна повернулась точно на угол, которому соответствует амплитуда сигнала управления 21. Если угол поворота антенны отличается от требуемого (по различным причинам), то возникает сигнал рассогласования на выходе блока 5. Напряжение рассогласования подается на нижний вход сумматора 2, изменяя амплитуду импульсов на его выходе. Так работает система при воздействии на ее вход амплитудно-модулированных (АМ) импульсов. При прохождении амплитудно-модулированных импульсов через реактивные цепи может возникнуть фазовое запаздывание сигнала управления. Поэтому в предлагаемой системе имеется компенсирующее фазоопережающее устройство. Компенсаторное нейтрализующее действие оказывает блок 10, охваченный отрицательной обратной связью в виде блока 13, как апериодического звена второго порядка. Поэтому блоки 10 и 13 создают фазовое опережение. Этим достигается восстановление фазового баланса. Кроме того, система с отрицательной обратной связью значительно увеличивает быстродействие и устойчивость системы регулирования.
Аналогичным образом осуществляется демодуляция частотно-модулированных импульсов (ЧМ) 18. Для этого коммутатор 8 включается так, что замыкаются контакты 0а-1а и 0б-1б, как показано в данном случае на фиг. 1. ЧМ сигнал проходит через первый ограничитель 9, первый усилитель 10, второй усилитель 11, второй ограничитель 14 и поступает на верхний вход сумматора 2. Аналогичным образом на пропорционально-интегрирующем устройстве регулирования 3 происходит преобразование ЧМ импульсного сигнала 18 в аналоговый сигнал 21 (фиг. 7). С увеличением частоты следования импульсов в ЧМ серии происходит увеличение амплитуды сигнала на пропорционально-интегрирующем устройстве регулирования 3, т. е. происходит выделение огибающей. Предлагаемое устройство работает также и при поступлении на вход сложного амплитудно-частотно-модулированного импульсного сигнала АЧМ 20. В этом случае коммутатор 8 ставится в нижнее положение, как в случае обработки амплитудно-модулированных сигналов 19.
Предлагаемое устройство существенно отличается от прототипа. Оно обладает повышенной помехозащищенностью за счет охвата блока 10 отрицательной обратной связью и использования в качестве сигнала управления импульсных сигналов в модулированном режиме, а также за счет усиления глубины модуляции (фиг. 3 и 4). Устройство обладает фазобалансирующими свойствами, исключающими отставание в обработке команд управления. Подавление помех и усиление глубины модуляции показано на фиг. 3 и 4.
Эффект от применения системы управления антенной радиолокационной станции заключается в том, что предлагаемое устройство с высокой помехозащищенностью и быстродействием обрабатывает команды управления. Кроме того, устройство компенсирует фазовое запаздывание команд управления, и поворот антенны происходит синхронно с поступлением команд управления. За счет увеличения глубины модуляции путем ограничения сигнала и последующего его усиления осуществляется дополнительное повышение помехозащищенности. Предлагаемое устройство является бионическим. Оно копирует биологический принцип демодуляции потенциалов мозга, а также принцип управления мышечной системой человека. Система может осуществлять демодуляцию импульсных сигналов с тремя различными видами модуляции: частотной, амплитудной и амплитудно-частотной. При этом устройство работает устойчиво. Предложенная система может также найти применение в физиологии в качестве модели механизма преобразования информации в нервно-мышечном аппарате человека. Таким образом, предлагаемая система обладает повышенной помехозащищенностью за счет охвата усилителя отрицательной обратной связью, использования в качестве сигнала управления импульсных сигналов, использования режима модуляции и усиления глубины модуляции команд управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления двигательным аппаратом | 1988 |
|
SU1577784A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОННЫХ СИСТЕМ | 1990 |
|
RU2050019C1 |
| РЕЗЕРВИРОВАННОЕ УСТРОЙСТВО | 1991 |
|
RU2017356C1 |
| Импульсных усилитель | 1988 |
|
SU1697091A1 |
| РЕЗЕРВИРОВАННОЕ УСТРОЙСТВО | 1991 |
|
RU2017359C1 |
| РЕЗЕРВИРОВАННОЕ УСТРОЙСТВО | 1991 |
|
RU2017358C1 |
| РЕЗЕРВИРОВАННОЕ УСТРОЙСТВО | 1991 |
|
RU2017357C1 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 1997 |
|
RU2124703C1 |
| Активный протез нижней конечности с биоэлектрическим управлением | 1988 |
|
SU1731210A1 |
| Устройство для моделирования мышечного сокращения | 1987 |
|
SU1503832A1 |



Изобретение относится к радиолокационной технике и ракетной технике и может быть использовано в устройствах управления антенной радиолокационной станции дальнего обнаружения и наведения. Цель изобретения - повышение помехозащищенности системы управления путем охвата усилителя отрицательной обратной связью и ограничения неинформативной части полезного сигнала и использования в качестве управляющих импульсов с модулированным законом. При разработке системы учитывался биологический принцип дискретно-аналогового преобразования потенциалов спинного мозга, осуществляющих управление скелетными мышцами нижних конечностей. Система содержит задающее устройство 1, сумматор 2, пропорционально-интегрирующее устройство 3, исполнительный механизм 4, измеритель рассогласования 5, антенну 6, датчик положения 7, коммутатор 8, первый ограничитель сигналов 9, первый усилитель 10, второй усилитель 11, аттенюатор 12, апериодическое звено второго порядка 13, второй ограничитель сигналов 14, усилитель мощности 15, исполнительный электродвигатель 16, редуктор с муфтой 17. 7 ил.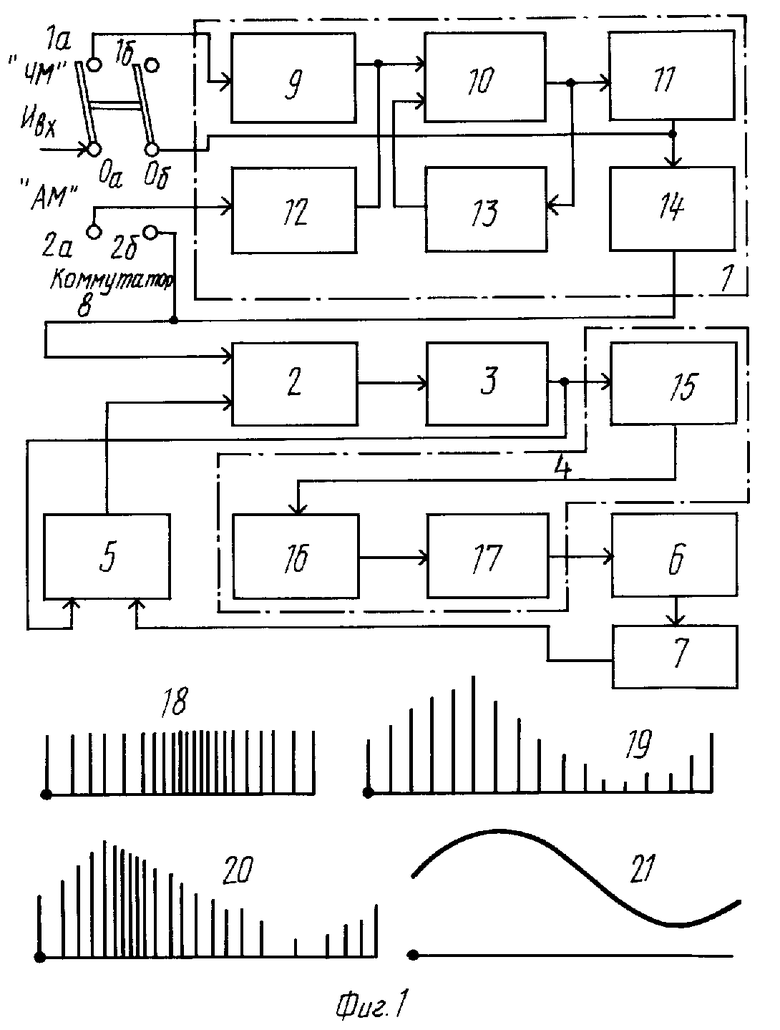
СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, содержащая задающее устройство, выход которого соединен с первым входом измерителя рассогласования, последовательно соединенные пропорционально-интегрирующее устройство регулирования и исполнительный механизм, связанный с антенной, датчик положения, который соединен с вторым входом измерителя рассогласования, а также коммутатор, отличающаяся тем, что задающее устройство содержит последовательно соединенные первый ограничитель уровня сигнала, первый усилитель, второй усилитель, второй ограничитель уровня сигнала, выход которого является выходом задающего устройства, а также аттенюатор, апериодическое звено второго порядка, вход которого соединен с выходом первого усилителя, выход - с вторым входом первого усилителя, первый вход которого подключен к выходу аттенюатора, вход которого соединен с первым выводом первой группы неподвижных контактов коммутатора, второй вывод которой соединен с выходом второго ограничителя уровня сигнала, первый вывод первой группы неподвижных контактов коммутатора соединен с входом первого ограничителя уровня сигнала, а первый и второй выводы подвижного контакта коммутатора соединены соответственно с входом системы и выходом второго усилителя, выход пропорционально-интегрального регулирующего устройства соединен с третьим входом измерителя рассогласования.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Двухканальная система автоматического сопровождения телескопа | 1977 |
|
SU684504A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
