1
Изобретение относится к системам автоматического сопровождения н может быть использовано при создании систем управления радио- и оптическими телескопами.
Известны двухканальные системы автоматического сопровождения, содержащие программное устройство, привод гру- бо1О наведения с датчиком угла поворота выходного вала, привод точного наведения с датчиком угла поворота выходного вала, приемное устройство и интегропропорциональный регулятор ши интегратор М-го порядка 11,
Из известных двухкг1пальных систем автоматического сопровождения наиболее близкой к данной по технической сущности является двухканальная система автоматического сопровождения, содержащая последовательно, соединенные программный задатчик, первый сумматор, первый привод, выход которого подключен к первому зеркалу непосредственно и через первый датчик угла поворота ко второму входу первог-о сумматора, последовательно соединенные приемное устройство, коммутатор, второй привод, выход которого подключен ко второму зеркалу непосредственно и через второй датчик угла поворота к первому входу первого регулятора и к первому входу второго сумматора, второй вход которого подключен к выходу первого сумматора, а выход - ко второму входу коммутатора, управляющий вход которого через анализирующее устройство подключен к выходу приемного устройства, второй вход первого регулятора подключен к первому выходу коммутатора, а выход - ко второму входу первого привода з,
Однако известная цвухканальная система может обеспечить сопровождение следящим инструментом наблюдаемого объекта только в том случае, если погрешности в составлении программы не превыи ают ширины диаграммы приемного устройства.
Целью изобретения является повышение точности и нацежности системы.
Это достигается тем, что в системе установлен второй регулятор, вход которого соединен со вторым выходом коммутатора, а выход - с управляющим входом гфограммного задатчика, выход первого регулятора соединен с третьим входом коммутатора.
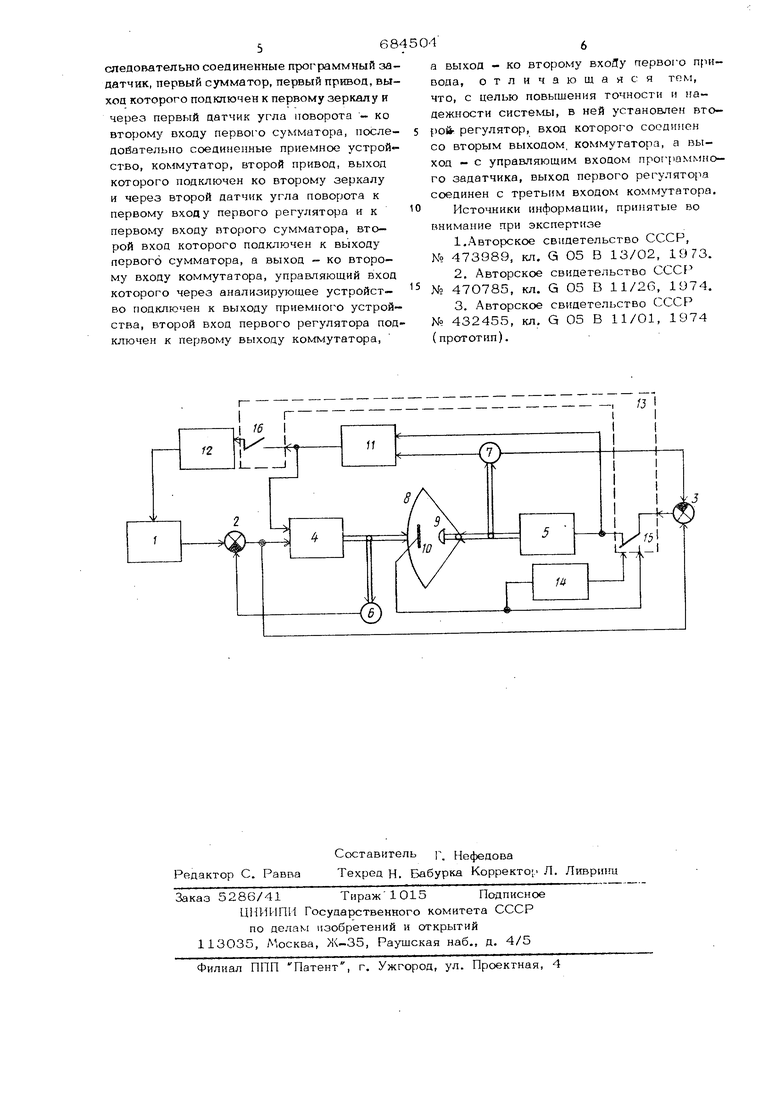
Структурная схема предлагаемой двухканальной системы автоматического сопровождения при использовании ее для управления двухзеркальным радиотелескопом показана на чертеже. Система содержит программный эадатчик 1,-первый и второй сумматоры 2, 3, первый и второй приводы 4, 5, первый и второй датчики угла поворота 6, 7, первое и второе зеркала 8, 9, приемное устройство
10,первый и второй регуляторы 11, 12 коммутатор 13, анализирующее устройство 14, первую и вторую коммутирующие группы 15, 16.
Сопровождение объекта наблюдения в системе осуществляется следующим образом. Априорно составленная npoipaMма движения объекта наблюдения с программного задатчика 1 поступает на сумматор 2, где сравнивается с величиной угла поворота датчика 6, установленного на выходном валу первого привода 4 (привода грубого наведения). Полученная разность подается на один из входов привода 4. Привод 4 разворачивает первое (большое) зеркало 8 и датчик 6 таким образом, чтобы уменьшить эту разность. Одновременно полученная разность подается на один из входов сумматора 3, где она сравнивается с углом поворота выходного вала второго привода 5 (привода точного наведения), снимаемого с датчика 7. Выходной сигнал с сумматора 3 через коммутатор 13 поступает на вход привода 5, который поворачивает второе (малое) зеркало 1О на величину ошибки привода 4 (привода грубого наведения). Сигнал, снимаемый с выхода датчика угла поворота 7, и сигнал ошибки привода 5, снимаемый -с выхода коммутирующей группы 15 коммутатора 13, поступают на входы первого регулятора
11,в качестве которого используется пропорционально-интегральный peгyлятo На выходе регулятора 11 формируется сигнал, который подается на вход привода 4, где он суммируется с сигналом |Ошибки, снимаемым с выхода сумматора |2. При попадании наблюдаемого объекта
В пределы диаграммы приемного устройства Ю коммутирующая группа 15 коммутатора 13 подключает вход привода 5 и связанный с ним вход регулятора 11 к выходу приемного устройства 10, а коммутирующая группа 16 подключает вход второго регулятора 12, в качестве которого используется интегральный регулятор, к выходу регулятора 11. При этом на вход привода 5 и на вход регулятора 11 поступает сигнал, пропорциональный отклонению линии визирования от направления на наблюдаемый объект. Иод действием указанного сигнала привод 5 стремится совместить линию визирования следящего инструмента с фактическим направлением на наблюдаемый объект путем поьорота зеркала 9. Положение зеркала 8 корректируется сигналом, снимаемым с регулятора 11. Одновременно выходной сигнал регулятора 11 через регулятор 12 подается на управляющий вход программного задатчика 1.
Коммутатор 13 сигналов управления с коммутируюпшми группами 15 и 16 управляется анализирующим устройством 14 в зависимости от величины и характера сигнала приемного устройства 10. Управление коммутатором 13 может осуществляться как оператором, так и автоматически (с помощью пороговых блоков)
Основное преимущество описанной дву канальной системы автоматического сопровождения по сравнению с известными заключается в том, что априори составленная программа постоянно кор)екти- руется с учетом фактического положения наблюдаемогО объекта. Это исключает насыщение сумматора 2 и позволяет обеспечить точное и устойчивое сопровождение даже при большой величине накапливающейся погрешности составления программы и при ее сбоях.
Экспериментальные исследования двух- канальной системы автоматического сопровождения, проведенные в .составе системы управления двухзеркального радиотелескопа показали, что система обеспечивает устойчивое сопровождение при погрешностях составления программы и ее сбоях, величина которых в 5-7 раз превышает ширину диаграммы приемного устройства.
Формула изобретения
Двух ка нал ьнаясистемаавт1: матического сопровождения телескопа, содержащая по568следовательно соединенные прюграммный задатчик, первый сумматор, первый привод, выход которого подключен к первому зеркалу и через первый датчик угла поворота - ко второму входу первого сумматора, последобательпо соединенные приемное устройство, коммутатор, второй привод, выход которого подключен ко второму зеркалу и через второй датчик угла поворота к первому входу первого регулятора и к первому входу второго сумматора, второй вход которого подключен к выходу первого сумматора, а выход - ко второму входу коммутатора, управляющий вход которого через анализирующее устройство подключен к выходу приемного устройства, второй вход первого регулятора подключен к первому выходу коммутатора. 4 а выход - ко второму вхоЯу первого привода, отличающаяся тем, что, с целью повышения точности и надежности системы, в ней установлен второй- регулятор, вход которого соединен со вторым выходом, коммутатора, а выход - с управляющим входом программного задатчика, выход первого регулятора соединен с третьим входом коммутатора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР, № 473989, кл, Q 05 В 13/02, 1073. 2,Авторское свидетельство CCCF № 470785, кл. G 05 В 11/26, 1974. 3.Авторское свидетельство СССР № 432455, кл, Q 05 В 11/01, 1974 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического сопровождения телескопа | 1989 |
|
SU1725181A1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2024907C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РАКЕТОЙ | 1997 |
|
RU2114373C1 |
