S
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления двигательным аппаратом | 1988 |
|
SU1577784A1 |
| Искусственная стопа | 1985 |
|
SU1344350A1 |
| Активный протез нижней конечности с биоэлектрическим управлением | 1988 |
|
SU1731210A1 |
| Модуль популяции нейронов | 1989 |
|
SU1732356A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОННЫХ СИСТЕМ | 1990 |
|
RU2050019C1 |
| Устройство для исследования центральной нервной системы | 1988 |
|
SU1810063A1 |
| Устройство для моделирования контрастности | 1988 |
|
SU1642484A1 |
| Управляемая электронная линия задержки | 1984 |
|
SU1224998A1 |
| БИОНИЧЕСКИЙ СТАБИЛИЗАТОР ДАВЛЕНИЯ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2003 |
|
RU2250487C1 |
| БИОНИЧЕСКИЙ ШАГАЮЩИЙ АППАРАТ | 2005 |
|
RU2293014C1 |
Устройство для моделирования мышечного сокращения относится к области физической культуры и спорта и может быть , в частности, использовано как модель мышцы, а также для изучения фазовых соотношений при передаче команд управления, активирующих мышцу, для изучения демпфирующих свойств нейронных систем регулирования, а также как искусственная активная стопа при протезировании инвалидов. Цель изобретения - имитация латентных, фазозапаздывающих, усилительных и интегрирующих свойств нервно-мышечного соединения при максимальном приближении модели к оригиналу. Устройство для моделирования мышечного сокращения содержит первое пропорционально-интегрирующее звено 1, формирователь 2 затухающей экспоненты, первый ждущий мультивибратор 3, N-блоков задержки в виде последовательно соединенных дифференцирующей цепи 4, ограничителя 5 и ждущего мультивибратора 6, первый эмитерный повторитель 10, интегрирующее устройство 11, первый усилитель-фазоинвертер 12, второе пропорционально-интегрирующее звено 13, второй усилитель-фазоинвертер 14, второй эмитерный повторитель 15, соленоид 16 с железным сердечником и штоком. С выхода генератора импульсов на вход устройства поступают треугольные импульсы. Проходя первое пропорционально-интегрирующее звено, входной импульс частично интегрируется. Формирователь экспоненты преобразует этот импульс в экспоненциально-угасающее напряжение, которое поступает в качестве запускающего на первый ждущий мультивибратор, генерирующий серию импульсов. После прохождения первой дифференцирующей цепочки образуются биполярные остроконечные импульсы, которые после прохождения первого ограничителя имеют одну полярность и следуют с задержкой. На выходе второго ждущего мультивибратора получается серия импульсов прямоугольной формы, задержанных во времени. С выхода N-го блока задержки серия импульсов, проходя первый эмитерный повторитель и интегрирующее устройство, преобразовывается в один широкий импульс практически треугольной формы. Проходя усилитель-фазоинвертер, второе пропорционально-интегрирующее звено, второй усилитель-фазоинвертер и второй эмитерный повторитель, широкие и мощные импульсы поступают в качестве управляющих на исполнительный орган. 3 ил.
ел
о
00
со
ГС
Фиг. 2
ношений при передаче команд управления, активирующих мышцу, для изучения демп- фиру1ош.их свойств нейронных систем регулирования, а также как искусственная активная стопа при протезировании инвалидов. Цель изобретения - имитация латент- ных, фазозапаздывающих, усилительных и интегрирующих свойств нервно-мышечного соединения при максимальном приближении модели к оригиналу. Устройство для моделирования мышечного сокращения содержит первое пропорционально-интегрирующее звено 1. формирователь 2 затухающей экспоненты, первый ждущий мультивибратор 3, п-блоков задержки в виде последовательно соединенных дифференцирующей цепи 4, ограничителя 5 и ждущего мультивибратора 6, первый эмитерный повторитель 10, интегрирующее устройство 1, первый усили- тель-фазоинвертер 12, второе пропорционально-интегрирующее звено 13, второй усили- тель-фазоинвертер 14, второй эмитерный повторитель 15, соленоид 16 с железным сердечником и щтоком. С выхода генератора импульсов на вход устройства поступают треугольные импульсы. Проходя первое
Изобретение относится к медицинской технике и может быть использовано как модель мышцы, а также для изучения фазовых соотношений при передаче команд управления, активирующих мыщцу, и для изучения демпфирующих свойств нейтронных систем регулирования.
Цель изобретения - имитация латентных, фазозапаздывающих, усилительных и интегрирующих свойств нервно-мыщечного соединения при максимальном приближении модели к оригиналу.
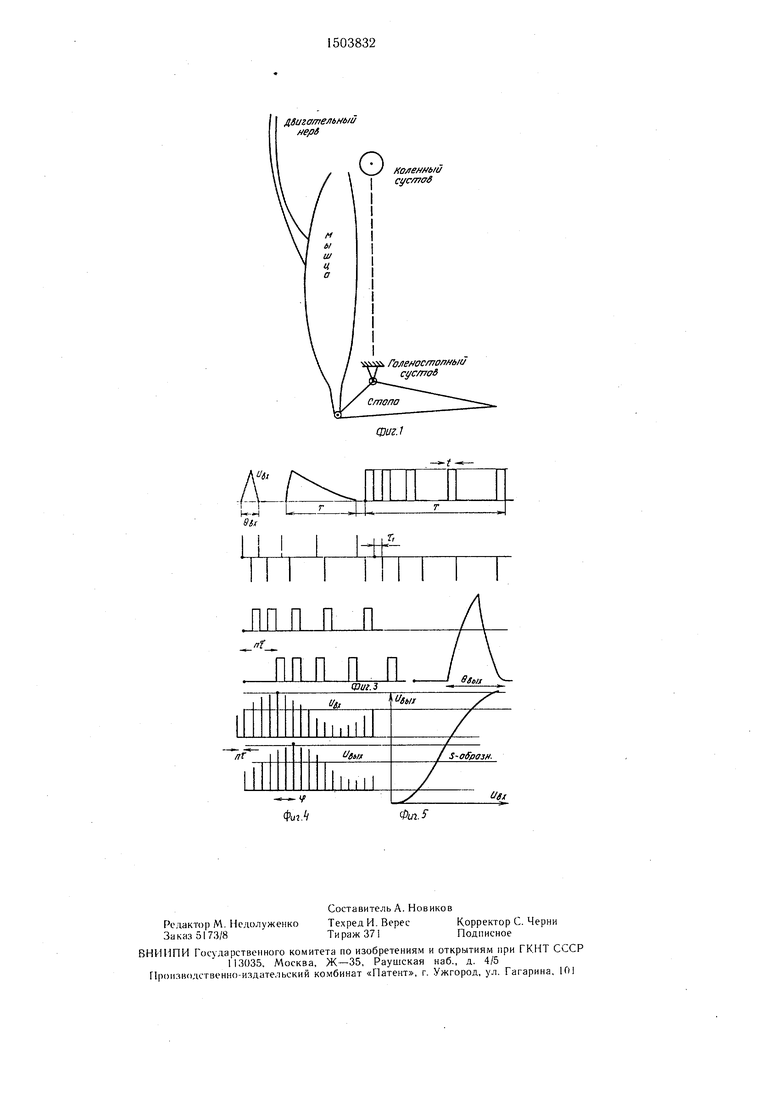
На фиг. 1 показана физиологическая схема сокращения мышцы, приводящей в работу двигательный аппарат; на фиг. 2 - структурная схема устройства; на фиг. 3- 5 - фазозапаздывающие свойства нервно- мышечного соединения и зависимость амплитуды сигнала на выходе от амплитуды сигнала на йходе.
Устройство для моделирования мышечного сокращения содержит первое пропорционально-интегрирующее звено.1, формирователь : атухаюп|ей экспоненты 2, первый жду- щш му;1ьтивибратор 3, первую дифференцирующую цепочку 4, первый ограничитель 5, второй ждущий мультивибратор 6, .вторую дифференцирующую цепочку 7, второй ограничитель 8, третий ждущий мультивибратор 9, первый эмитерный повторитель 10, интегрирующее устройство 11, первый усилитель-фазоинвертер 12, второе пропорционально-интегрирующее звено 13, второй усилитель-фазоинвертер 14, второй эмитерный
пропорционально-интегрирующее звено, входной импульс частично интегрируется. Формирователь экспоненты преобразует этот импульс в экспоненциально-угасающее напряжение, которое поступает в качестве запускающего на первый ждущий мультивиб: ратор, генерирующий серию импульсов. После прохождения первой дифференцирующей цепочки образуются биполярные остроконечные импульсы, которые после прохождения первого ограничителя имеют одну полярность и следуют с задержкой. На выходе второго ждущего мультивибратора получается серия импульсов прямоугольной формы, задержанных во времени. С выхода п-го блока задержки серия импульсов, проходя первый эмитерный повторитель и интегрирующее устройство, преобразовывается в один широкий импульс практически треугольной формы. Проходя усилитель-фазо- инвертер, второе пропорционально-интегрирующее звено, второй усилитель-фазоинвер- тер и второй эмитерный повторитель, -широкие и мощные импульсы поступают в качестве управляющих на исполнительный орган. 5 ил.
повторитель 15, исполнительный орган 16,
0 содержащий соленоид с железным сердечником и щтоком, рычаг 17 второго рода моделирующий стопу, генератор 18 импульсов, регистрирующий прибор 19.
Устройство для моделирования мышечного сокращения работает следующим образом.
5 С выхода генератора импульсов 18 на вход устройства поступают треугольные импульсы t/Bx. Проходя первое пропорционально-интегрирующее звено 1, входной импульс UBX частично интегрируется пропорQ ционально-интегрирующим звеном в треугольный импульс. Формирователь экспоненты 2 преобразовывает треугольный импульс в экспоненционально угасающее напряжение которое поступает в качестве запускающего на первый ждущий мультивибратор 3. По5 следний генерирует серию импульсов. Длительность серии Т равна длительности Т экспоненты. Причем длительность импульса разряда / значительно меньше длительности экспоненты Т. После прохождения первой дифференцирующей цепочки 4 образуются би0 полярные остроконечные импульсы, которые после прохождения первого ограничителя, 5 имеют одну полярность и следуют с задержкой Ci. На выходе второго ждущего мультивибратора получается серия импульсов прямоугольной формы, задержанная по
5
отнощению к аналогичной серии прямоугольных импульсов на время fi. После прохождения второй дифференцирующей цепочки 7, второго ограничителя 8, на выходе
третьего .ждущего мультивибратора 9 получается серия импульсов, но уже следующая с задержкой 2ч:. На выходе п-го блока задержки формируется серия прямоугольных импульсов, задержанная на время пт. Это время задержки должно лежать в пределах 15-25 мс, что соответствует естественной лантентности сокращения мыщцы. С выхода п-го блока задержки серия импульсов, проходя первый эмитерный повторитель 10 и
но изучать механизм мышечного сокращения при одиночном и ритмичном входном воздействии. В режиме одиночных импульсов входные импульсы (Увх подаются на первый канал регистрирующего прибора, а на второй канал подаются импульсы (Увых. с выхода устройства. Сравнивая момент времени начала воздействия входного импульса U. и выходного б вых., определяют скрытый период мыщечного сокращения, а изменяя
интегрирующее устройство 11, преобразовы- Юамплитуду входного импульса Ув.х, наблюдавается в один щирокий импульс, практи-ют за изменением амплитуды выходного имчески треугольной формы. Длительность по-пульса (/вых. и его длительности ввых. Устлученного импульса значительно больще дли-ройство может быть использовано также как
тельности входного импульса. Проходячасть протезирующего устройства, заменяюпервый усилитель-фазоинвертер 12, второе сщего отсутствующую стопу инвалида. При
пропорционально-интегрирующее звено 13, второй усилитель-фазоинвертер 14 и второй эмитерный повторитель 15, щирокие импульсы усиливаются по амплитуде и мощности, несколько увеличиваются по длительности вторым пропорционально-интегрирующим звеном 13 и в виде выходного импульса Увых. поступают в качестве управляющего на исполнительный орган 16, состоящий из соленоида с сердечником и штоком. Под действием прищедщего импульса (Увых. сердечник втягивается внутрь соленоида и приводит в действие рычаг второго рода 17, моделирующий, стопу. Если амплитуда входного импульса (Увх увеличивается, то увеличивается и амплитуда выходного импульса Увых.. Соответственно увеличивается и отклонение стопы. При этом выходное напряжение (Увых появляется лищь через 15-25 мс спустя после поступления входного импульса Увх.. Эта зависимость является S-образнрй, т. е. амплитуда вход20
25
этом стопа является активной и производит движения в такт с командами управления, поступающими от механизмов управления спинного мозга. Устройство может быть использовано также при моделировании рефлекторной дуги в качестве модели двигательного аппарата. Кроме того, устройство может быть использовано как наглядное пособие при чтении лекций по курсу биомеханики.
Формула изобретения
Устройство для моделирования мышечного сокращения, содержащее стопу в виде рь;30
Если на вход устройства поступает серия импульсов, модулированная по амплитуде, то на выходе устройства имеется такая же серия модулированных импульсов, но фачага второго рода, отличающееся те.м, что, с целью имитации латентных, фазозапазды- вающих, усилительных и интегрирующих свойств нервно-мышечного соединения при максимальном приближении модели к оригиналу, в него введены последовательно соеного импульса L/BX. переносится на выход 35 Диненные генератор импульсов, первое про- 6 вых. с запаздыванием на время 15-25 мс.порционально-интегрирующее звено, формирователь затухающей экспоненты, первый ждущий мультивибратор, блоки задержки в виде последовательно соединенных дифференцирующих цепей, ограничите.пь и ждущий
за огибающей выходных импульсов запазды- мультивибратор, первый эмитерный повтори- вает на величину ф. Величина ф опреде-тель, интегрирующее устройство, первый усиляется соотнощением величин R и К про-литель-фазоинвертер, второе пропорциональпорционально-интегрирующих звеньев 1и 13.но-интегрирующее звено, второй усилительПри этом длительность выходных импульсовфазоинвертер, второй эмитерный повториввых, превыщает длительность входных .с тель, соленоид, с железным сердечником и
импульсов ввх., т. е. ввых.ввх, а (Увых. - -
/(Увх.). Таким образом, стопа отрабатывает команды управления с запаздыванием линейным пт и фазовым запаздыванием ф (фиг. 3- 5).
Эффект от применения устройства для 50 второго эмитерного повторителя до- моделирования мыщечного сокращения состо- полнительно соединен с вторым входом рейт в том, что с помопяью устройства мож- гистрирующего прибора.
щтоком, и регистрирующий, прибор с двумя входами, причем выход генератора импульсов соединен с входом первого пропорционально-интегрирующего звена и с первым входом регистрирующего прибора, а
но изучать механизм мышечного сокращения при одиночном и ритмичном входном воздействии. В режиме одиночных импульсов входные импульсы (Увх подаются на первый канал регистрирующего прибора, а на второй канал подаются импульсы (Увых. с выхода устройства. Сравнивая момент времени начала воздействия входного импульса U. и выходного б вых., определяют скрытый период мыщечного сокращения, а изменяя
амплитуду входного импульса Ув.х, наблюдащего отсутствующую стопу инвалида. При
этом стопа является активной и производит движения в такт с командами управления, поступающими от механизмов управления спинного мозга. Устройство может быть использовано также при моделировании рефлекторной дуги в качестве модели двигательного аппарата. Кроме того, устройство может быть использовано как наглядное пособие при чтении лекций по курсу биомеханики.
25
Формула изобретения
Устройство для моделирования мышечного сокращения, содержащее стопу в виде рь;30
тель, соленоид, с железным сердечником и
- -
щтоком, и регистрирующий, прибор с двумя входами, причем выход генератора импульсов соединен с входом первого пропорционально-интегрирующего звена и с первым входом регистрирующего прибора, а
двигательный нерй
пп п п п
-7Г
ппп п п
О
Коленный сус/псв
(Циг.З
| Искусственная стопа | 1977 |
|
SU679208A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
