ел
Ч Ч
00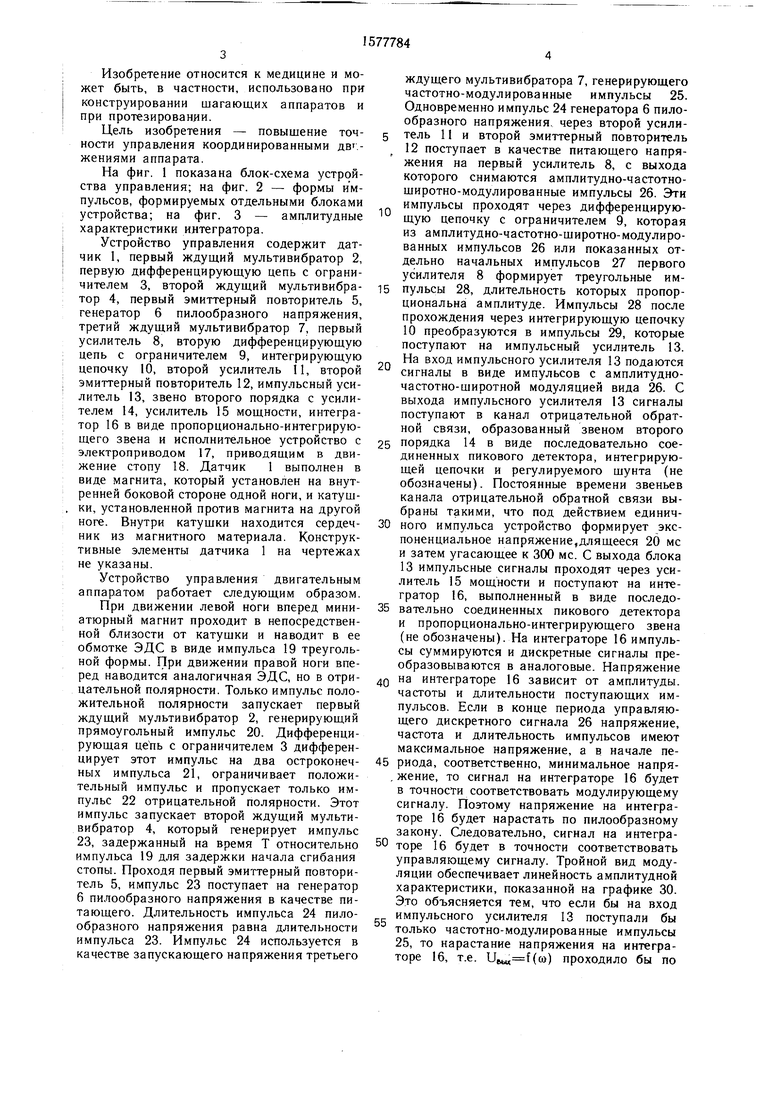

| название | год | авторы | номер документа |
|---|---|---|---|
| Активный протез нижней конечности с биоэлектрическим управлением | 1988 |
|
SU1731210A1 |
| Устройство для моделирования мышечного сокращения | 1987 |
|
SU1503832A1 |
| Искусственная стопа | 1985 |
|
SU1344350A1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2024907C1 |
| БИОНИЧЕСКИЙ ШАГАЮЩИЙ АППАРАТ | 2005 |
|
RU2293014C1 |
| Модуль популяции нейронов | 1989 |
|
SU1732356A1 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
| ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1972 |
|
SU412609A1 |
| Одноканальное устройство для фазового управления трехфазным тиристорным преобразователем | 1985 |
|
SU1252882A1 |
| Устройство для исследования центральной нервной системы | 1988 |
|
SU1810063A1 |


Изобретение относится к медицине и может быть, в частности, использовано при конструировании шагающих аппаратов и при протезировании. Цель изобретения - повышение точности управления координированными движениями аппарата. Устройство управления двигательным аппаратом содержит датчик 1, первый ждущий мультивибратор 2, первую дифференцирующую цепь с ограничителем 3, второй ждущий мультивибратор 4, первый эмиттерный повторитель 5, генератор 6 пилообразного напряжения, третий ждущий мультивибратор 7, первый усилитель 8, вторую дифференцирующую цепь с ограничителем 9, интегрирующую цепочку 10, второй усилитель 11, второй эмиттерный повторитель 12, импульсный усилитель 13, звено второго порядка 14, усилитель мощности 15, интегратор 16 и исполнительное устройство с электроприводом 17 и стопой 18. Устройство может быть использовано для управления сгибанием стопы при протезировании, а также при конструировании искусственной стопы шагающих устройств. 3 ил.
Фиг.1
Изобретение относится к медицине и может быть, в частности, использовано при конструировании шагающих аппаратов и при протезировании.
Цель изобретения - повышение точности управления координированными движениями аппарата.
На фиг. 1 показана блок-схема устройства управления; на фиг. 2 - формы импульсов, формируемых отдельными блоками устройства; на фиг. 3 - амплитудные характеристики интегратора.
Устройство управления содержит датчик 1, первый ждущий мультивибратор 2, первую дифференцирующую цепь с ограничителем 3, второй ждущий мультивибратор 4, первый эмиттерный повторитель 5, генератор 6 пилообразного напряжения, третий ждущий мультивибратор 7, первый усилитель 8, вторую дифференцирующую цепь с ограничителем 9, интегрирующую цепочку 10, второй усилитель 11, второй эмиттерный повторитель 12, импульсный усилитель 13, звено второго порядка с усилителем 14, усилитель 15 мощности, интегратор 16 в виде пропорционально-интегрирующего звена и исполнительное устройство с электроприводом 17, приводящим в движение стопу 18. Датчик 1 выполнен в виде магнита, который установлен на внутренней боковой стороне одной ноги, и катушки, установленной против магнита на другой ноге. Внутри катушки находится сердечник из магнитного материала. Конструктивные элементы датчика 1 на чертежах не указаны.
Устройство управления двигательным аппаратом работает следующим образом.
При движении левой ноги вперед миниатюрный магнит проходит в непосредственной близости от катушки и наводит в ее обмотке ЭДС в виде импульса 19 треугольной формы. При движении правой ноги вперед наводится аналогичная ЭДС, но в отрицательной полярности. Только импульс положительной полярности запускает первый ждущий мультивибратор 2, генерирующий прямоугольный импульс 20. Дифференцирующая цепь с ограничителем 3 дифференцирует этот импульс на два остроконечных импульса 21, ограничивает положительный импульс и пропускает только импульс 22 отрицательной полярности. Этот импульс запускает второй ждущий мультивибратор 4, который генерирует импульс 23, задержанный на время Т относительно импульса 19 для задержки начала сгибания стопы. Проходя первый эмиттерный повторитель 5, импульс 23 поступает на генератор 6 пилообразного напряжения в качестве питающего. Длительность импульса 24 пилообразного напряжения равна длительности импульса 23. Импульс 24 используется в качестве запускающего напряжения третьего
ждущего мультивибратора 7, генерирующего частотно-модулированные импульсы 25. Одновременно импульс 24 генератора 6 пилообразного напряжения, через второй усили- тель 11 и второй эмиттерный повторитель
12поступает в качестве питающего напряжения на первый усилитель 8, с выхода которого снимаются амплитудно-частотно- широтно-модулированные импульсы 26. Эти импульсы проходят через дифференцирующую цепочку с ограничителем 9, которая из амплитудно-частотно-широтно-модулированных импульсов 26 или показанных отдельно начальных импульсов 27 первого усилителя 8 формирует треугольные импульсы 28, длительность которых пропорциональна амплитуде. Импульсы 28 после прохождения через интегрирующую цепочку 10 преобразуются в импульсы 29, которые поступают на импульсный усилитель 13. На вход импульсного усилителя 13 подаются сигналы в виде импульсов с амплитудно- частотно-широтной модуляцией вида 26. С выхода импульсного усилителя 13 сигналы поступают в канал отрицательной обратной связи, образованный звеном второго
5 порядка 14 в виде последовательно соединенных пикового детектора, интегрирующей цепочки и регулируемого шунта (не обозначены). Постоянные времени звеньев канала отрицательной обратной связи выбраны такими, что под действием единич0 ного импульса устройство формирует экспоненциальное напряжение,длящееся 20 мс и затем угасающее к 300 мс. С выхода блока
13импульсные сигналы проходят через усилитель 15 мощности и поступают на интегратор 16, выполненный в виде последо5 вательно соединенных пикового детектора и пропорционально-интегрирующего звена (не обозначены). На интеграторе импульсы суммируются и дискретные сигналы преобразовываются в аналоговые. Напряжение
Q на интеграторе 16 зависит от амплитуды, частоты и длительности поступающих импульсов. Если в конце периода управляющего дискретного сигнала 26 напряжение, частота и длительность импульсов имеют максимальное напряжение, а в начале пе5 риода, соответственно, минимальное напря- , жение, то сигнал на интеграторе 16 будет в точности соответствовать модулирующему сигналу. Поэтому напряжение на интеграторе 16 будет нарастать по пилообразному закону. Следовательно, сигнал на интегра0 торе 16 будет в точности соответствовать управляющему сигналу. Тройной вид модуляции обеспечивает линейность амплитудной характеристики, показанной на графике 30. Это объясняется тем, что если бы на вход импульсного усилителя 13 поступали бы
5
только частотно-модулированные импульсы 25, то нарастание напряжения на интеграторе 16, т.е. (o) проходило бы по
кривой ОА|Аз. Но за счет второго и третьего вида модуляции (амплитудного и широтного) увеличение напряжения на интеграторе 16 происходит по прямой ОА|Аг, т.е. входные импульсы U в начале периода имеют небольшую амплитуду и длительность UHUH и гшч и при суммировании не дают выпуклости, которая характерна для экспоненты OA|A3. С выхода интегратора 16 напряжение поступает на исполнительное устройство с электроприводом 17, движения которого в точности воспроизводят форму управляющего сигнала. Это достигается комбинированным способом управления. Так, если бы использовался только один вид модуляции (частотный), то движения характеризовались бы нелинейными искажениями. Искажения наиболее сильны на высоких частотах следования импульсов, так как на этом участке (1-2) экспонента начинает заметно искривляться. Но за счет того, что в это время повышается амплитуда и длительность входного сигнала Uex до UHaK и ,««, напряжение продолжает повышаться и движения исполнительного устройства с электроприводом 17 будут проходить по прямой. На низких частотах, наоборот, амплитуда входного сигнала ииич меньше, чем средняя амплитуда Uv. Поэтому начальный участок не характеризуется таким высоким напряжением. В итоге, без искажений будет воспроизводиться форма управляющего сигнала, а движения будут происходить с максимальным размахом.
Эффект от применения устройства управления двигательным аппаратом состоит в том, что благодаря применению в качестве управляющего воздействия сигнала с тройным видом модуляции - амплитудно-частотно-широтным удалось расширить динамический диапазон работы двигательного аппарата, сделав размах движений отдельных звеньев конечности большим с приближением к форме сигнала управления. Благодаря охвату импульсного усилителя 13 отрицательной обратной связью в виде звена второго порядка 14 повышается быстродействие устройства управления за счет снижения постоянной времени системы. Это увеличивает скорость управления движением. Кроме того, импульсный усилитель 13, охваченный отрицательной обратной связью с звеном второго порядка 14, является форсирующим динамическим фазоопережаю- щим звеном, которое является антиподом фазозапаздывающему звену пропорционально-интегрирующего устройства интегратрра 16. Это компенсирует запаздывание фазы и управляющий сигнал поступает на исполнительное устройство с электроприводом 17 без фазового запаздывания. Этим достигается выполнение движений синхронно с управляющим сигналом. За счет тройного вида модуляции резко повышается помехозащищенность всего устройства управления, так как общая помехозащищенность равна произведению помехозащищенности отдельных видов модуляции.
Таким образом, описанное устройство управления двигательным аппаратом обладает высокой помехозащищенностью, большим быстродействием, минимальными нелинейными искажениями при большом амплитудном размахе движения и позволяет осуществлять движения синхронно с сигналом управления без фазового запаздывания. Устройство управления двигательным аппаратом максимально приближено к меха5 низмам управления в живой природе. В частности, управление движением стопы осуществляется регуляторным аппаратом спинного мозга, основу которого составляет механизм пресинаптического торможения - наиболее эффективный вид торможения в
0 центральной нервной системе. При активации чувствительных рецепторов стопы в спинной мозг поступают импульсы, модулированные по тройному закону: по амплитуде, по частоте и по длительности. Эти
5 импульсы активируют механизм пресинаптического торможения, направляющий по центробежному нерву сигнал управления к стопе. Нерв является пропорционально-интегрирующим звеном. Такая система управления обладает большим быстродействием, повы0 шенной помехозащищенностью и позволяет с большой точностью осуществлять координированные движения.
Предлагаемая система может быть использована для управления сгибанием стопы при конструировании искусственной стопы
5 шагающих устройств.
Формула изобретения
Устройство управления двигательным
0 аппаратом, содержащее датчик, исполнительное устройство с электроприводом, два усилителя, интегрирующую цепь и усилитель мощности, отличающееся тем, что, с целью повышения точности управления координированными движениями аппарата, в него
5 введены три ждущих мультивибратора, два эмиттерных повторителя, генератор пилообразного напряжения, дифференцирующие цепь с ограничителями, звено второго порядка и интегратор, причем датчик, первый ждущий мультивибратор, первая дифферен0 цирующая цепь с ограничителем, второй ждущий мультивибратор, первый эмиттерный повторитель, генератор пилообразного напряжения, третий ждущий мультивибратор, первый усилитель, вторая дифференцирую5 щая цепь с ограничителем, интегрирующая цепочка, импульсный усилитель, усилитель мощности, интегратор и исполнительное устройство с электроприводом соединены последовательно, а выход генератора пилообразного напряжения дополнительно соединен с вторым усилителем, который через второй эмиттерный повторителе соединен с
Л
Ь-г
Фиг. 2
первым усилителем, а выход импульсного усилителя через звено второго порядка соединен с входом импульсного усилителя.
S
13
/
23
27
./
28
29
фив.З
| Биоэлектрическая система управления протезом верхней конечности | 1973 |
|
SU467742A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
